
Lithium-Ion Battery State of Health Estimation with Multi-Feature Collaborative Analysis and Deep Learning Method

 , , ,
, , ,  and
and
Abstract
1. Introduction
2. Multi-Feature Analysis
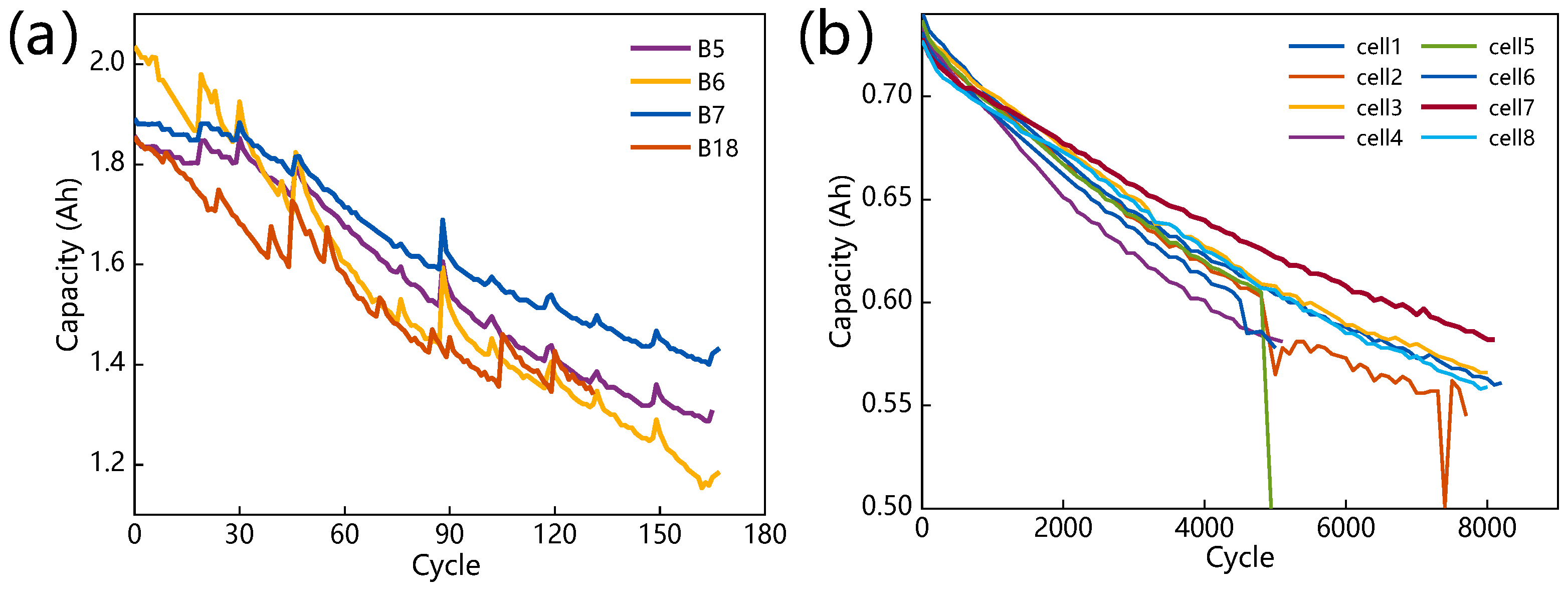
2.1. Battery Degradation Dataset
2.2. Feature Analysis
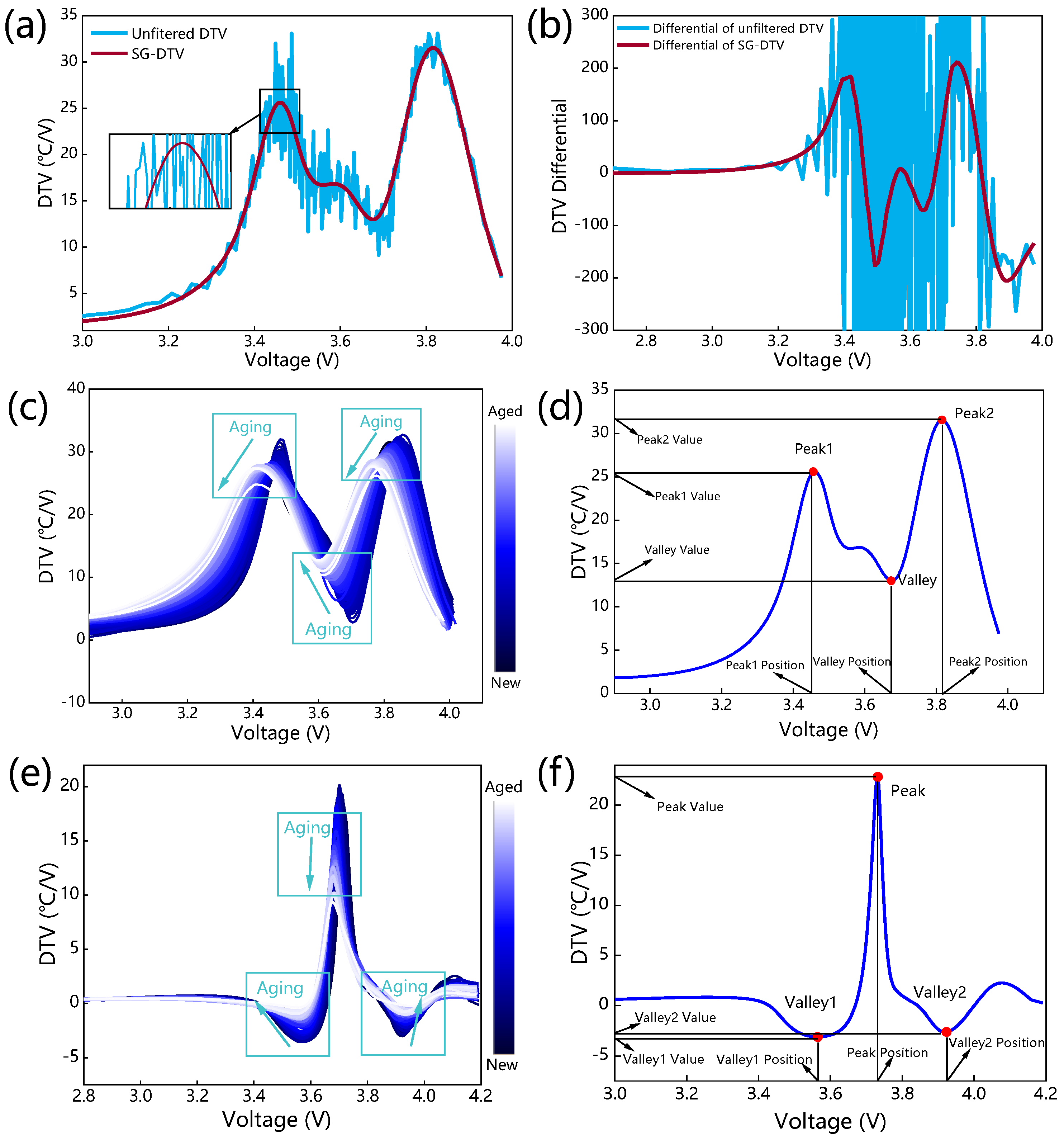
2.2.1. DTV Analysis
2.2.2. SVD Analysis
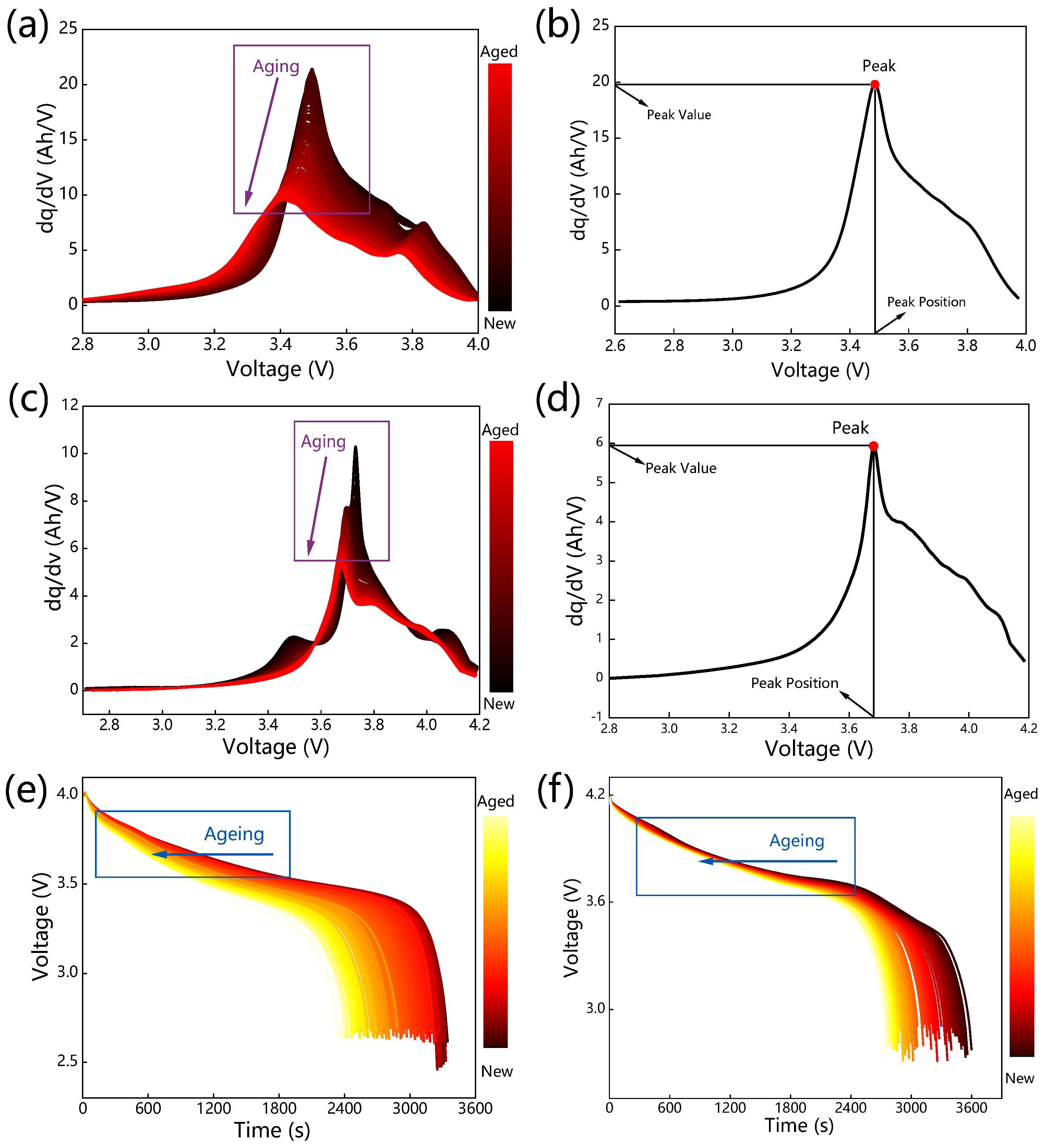
2.2.3. IC and TVC Analyses
3. Methodology
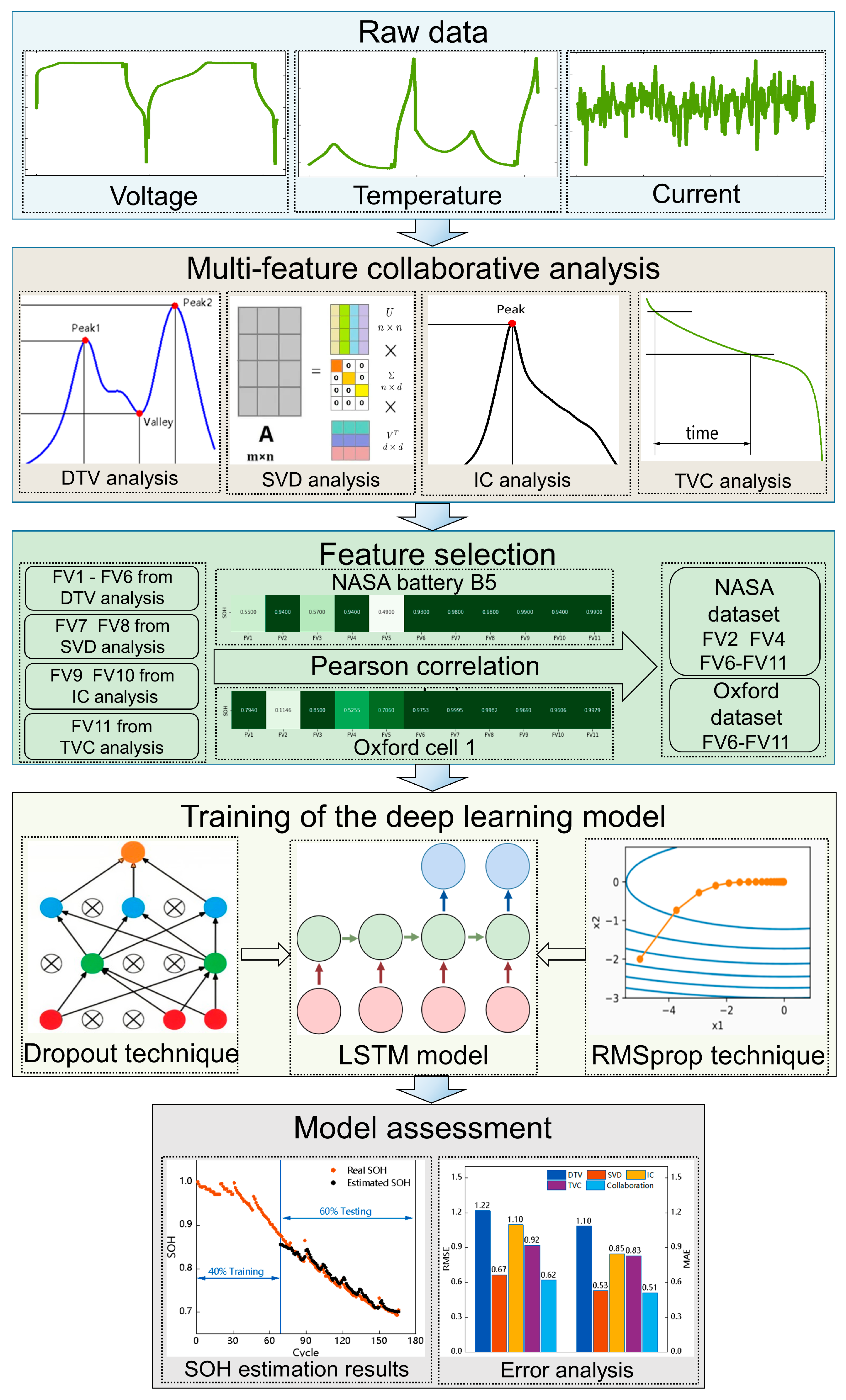
3.1. Framework of Multi-Feature SOH Prediction
3.2. Feature Selection
3.3. Model Structure
4. Results and Discussion
4.1. Evaluation Index
4.2. Results Based on the NASA Dataset
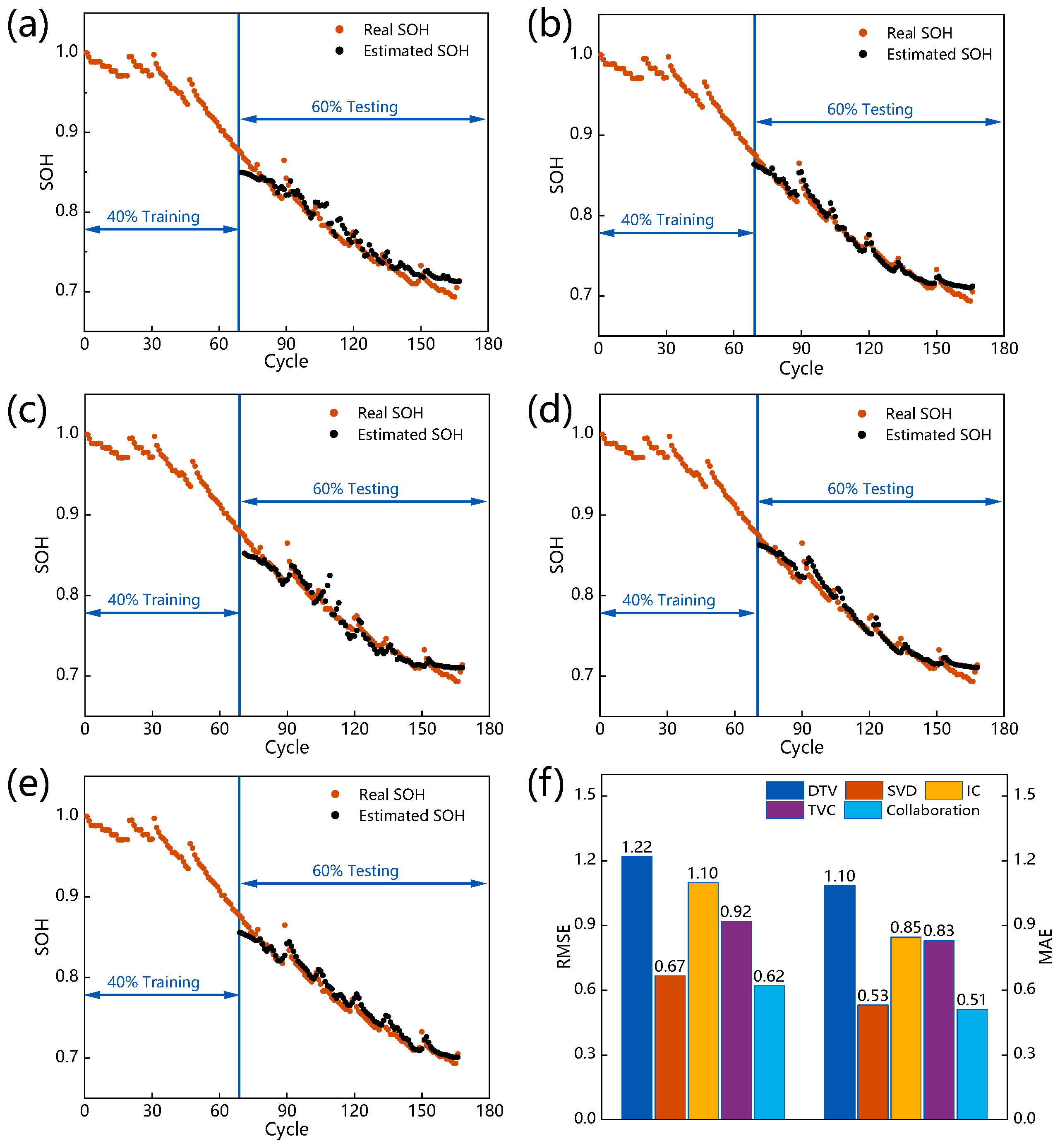
4.2.1. Results with Different Features
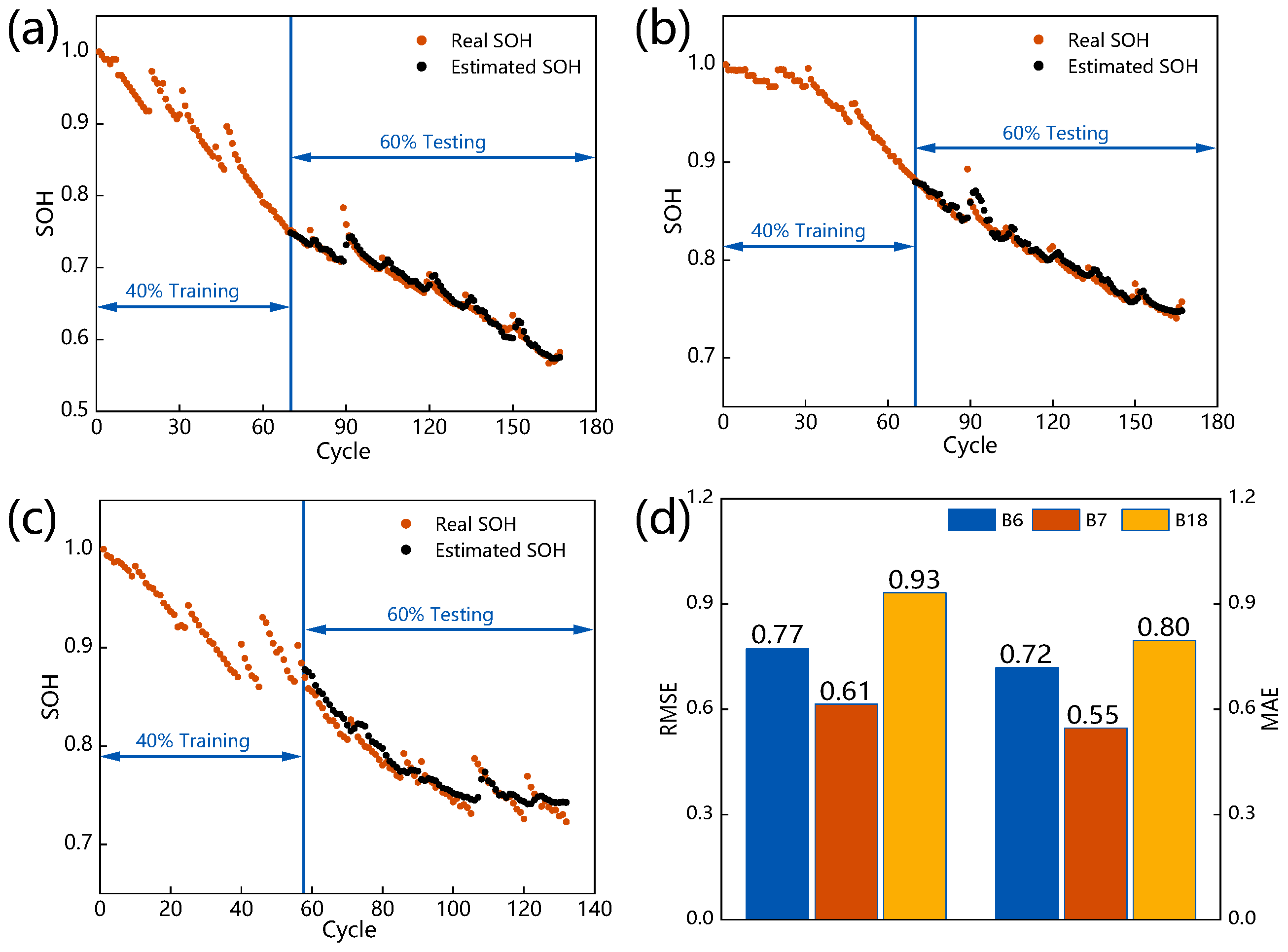
4.2.2. Results Based on Different Batteries
4.3. Results Based on the Oxford Dataset
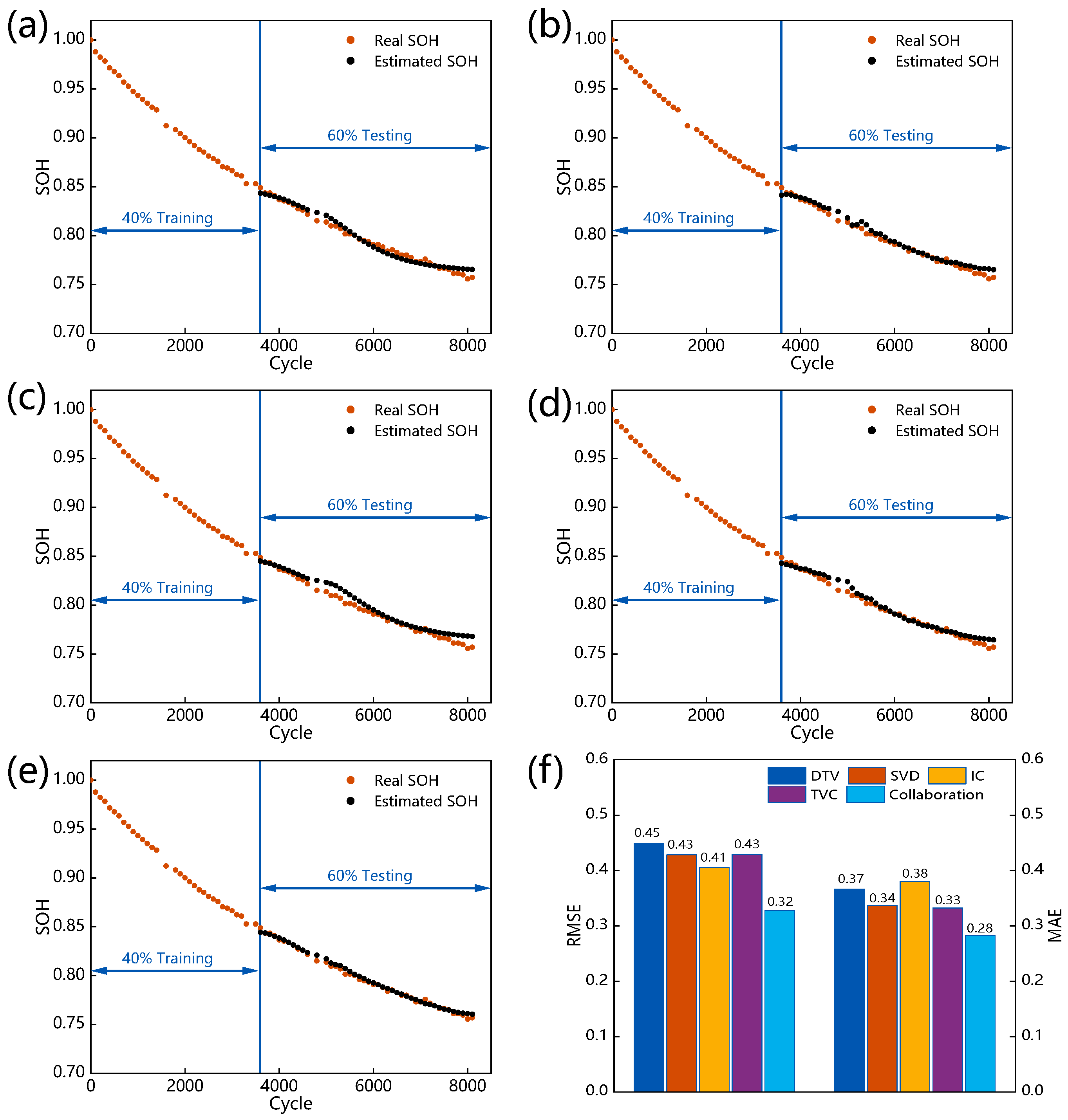
4.3.1. Results with Different Features
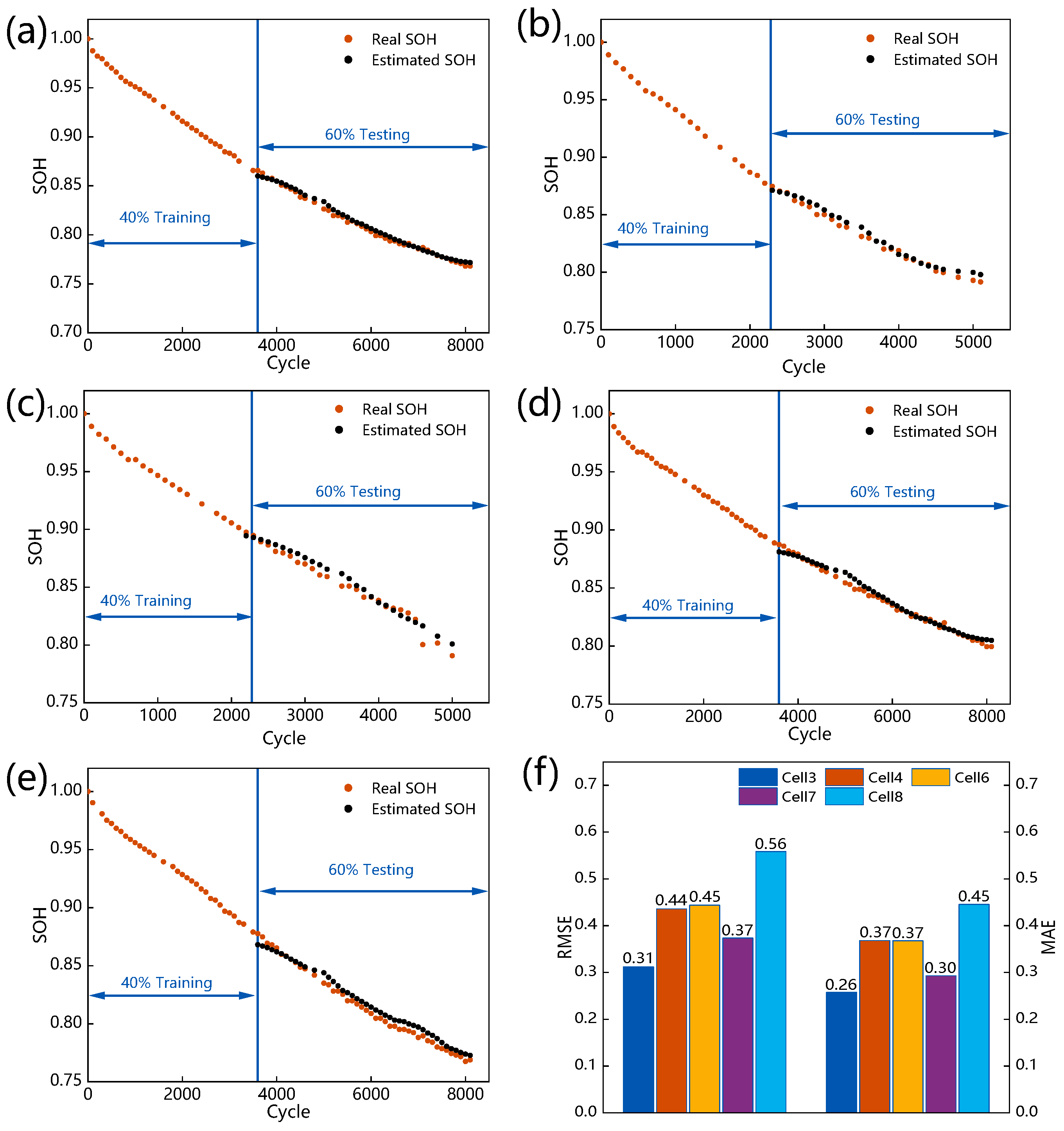
4.3.2. Results on Different Battery
4.4. Compared with Other Methods
4.5. Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, C.C.; Su, Z.; Gao, X.-L.; Cao, R.; Yang, S.-C.; Liu, X.-H. Ultra-high-energy lithium-ion batteries enabled by aligned structured thick electrode design. Rare Met. 2022, 41, 14–20. [Google Scholar] [CrossRef]
- Zuo, L.; Zuo, L.; Lu, D.; Yang, T.; Yue, D.; Li, W.; Ma, Q.; Chen, Y.; Zheng, C.; Wu, X. Recent achievements of free-standing material and interface optimization in high-energy-density flexible lithium batteries. Carbon Neutralization 2022, 1, 316–345. [Google Scholar] [CrossRef]
- Li, J.J.; Zhang, L.; Doyle-Davis, K.; Li, R.Y.; Sun, X.L. Recent advances and strategies in the stabilization of single-atom catalysts for electrochemical applications. Carbon Energy 2020, 2, 488–520. [Google Scholar] [CrossRef]
- Cao, R.; Cheng, H.; Jia, X.; Gao, X.; Zhang, Z.; Wang, M.; Li, S.; Zhang, C.; Ma, B.; Liu, X.; et al. Non-invasive Characteristic Curve Analysis of Lithium-ion Batteries Enabling Degradation Analysis and Data-Driven Model Construction: A Review. Automot. Innov. 2022, 5, 146–163. [Google Scholar] [CrossRef]
- Xiong, R.; Pan, Y.; Shen, W.X.; Li, H.L.; Sun, F.C. Lithium-ion battery aging mechanisms and diagnosis method for automotive applications: Recent advances and perspectives. Renew. Sustain. Energy Rev. 2020, 131, 110048. [Google Scholar] [CrossRef]
- Yang, S.; Cheng, H.; Wang, M.; Lyu, M.; Gao, X.; Zhang, Z.; Cao, R.; Li, S.; Lin, J.; Hua, Y.; et al. Multi-scale Battery Modeling Method for Fault Diagnosis. Automot. Innov. 2022, 5, 400–414. [Google Scholar] [CrossRef]
- Chen, S.; Gao, Z.; Sun, T. Safety challenges and safety measures of Li-ion batteries. Energy Sci. Eng. 2021, 9, 1647–1672. [Google Scholar] [CrossRef]
- Meng, J.H.; Cai, L.; Stroe, D.I.; Luo, G.Z.; Sui, X.; Teodorescu, R. Lithium-ion battery state-of-health estimation in electric vehicle using optimized partial charging voltage profiles. Energy 2019, 185, 1054–1062. [Google Scholar] [CrossRef]
- Guo, L.Z.; Sun, J.F.; Wei, J.X.; Liu, Y.; Hou, L.R.; Yuan, C.Z. Conductive metal-organic frameworks: Recent advances in electrochemical energy-related applications and perspectives. Carbon Energy 2020, 2, 203–222. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, L.; Gao, X.; Pan, Y.; Liu, X.; Feng, X. Modeling of Lithium plating in lithium ion batteries based on Monte Carlo method. J. Power Source 2022, 541, 231568. [Google Scholar] [CrossRef]
- Safari, M.; Morcrette, M.; Teyssot, A.; Delacourt, C. Life-Prediction Methods for Lithium-Ion Batteries Derived from a Fatigue Approach I. Introduction: Capacity-Loss Prediction Based on Damage Accumulation. J. Electrochem. Soc. 2010, 157, A713. [Google Scholar] [CrossRef]
- Yu, H.; Yang, L.; Zhang, L.; Li, J.; Liu, X. Parallel battery pack charging strategy under various ambient temperatures based on minimum lithium plating overpotential control. iScience 2022, 25, 104243. [Google Scholar] [CrossRef]
- Pang, M.-C.; Yang, K.; Brugge, R.; Zhang, T.; Liu, X.; Pan, F.; Yang, S.; Aguadero, A.; Wu, B.; Marinescu, M.; et al. Interactions are important: Linking multi-physics mechanisms to the performance and degradation of solid-state batteries. Mater. Today 2021, 49, 145–183. [Google Scholar] [CrossRef]
- Iurilli, P.; Brivio, C.; Carrillo, R.E.; Wood, V. Physics-Based SoH Estimation for Li-Ion Cells. Batteries 2022, 8, 204. [Google Scholar] [CrossRef]
- Bian, X.L.; Liu, L.C.; Yan, J.Y.; Zou, Z.; Zhao, R.K. An open circuit voltage-based model for state-of-health estimation of lithium-ion batteries: Model development and validation. J. Power Source 2020, 448, 400–414. [Google Scholar] [CrossRef]
- Dubarry, M.; Berecibar, M.; Devie, A.; Ansean, D.; Omar, N.; Villarreal, I. State of health battery estimator enabling degradation diagnosis: Model and algorithm description. J. Power Source 2017, 360, 59–69. [Google Scholar] [CrossRef]
- Gao, Z.; Xie, H.; Yang, X.; Niu, W.; Li, S.; Chen, S. The Dilemma of C-Rate and Cycle Life for Lithium-Ion Batteries under Low Temperature Fast Charging. Batteries 2022, 8, 234. [Google Scholar] [CrossRef]
- Aykol, M.; Gopal, C.B.; Anapolsky, A.; Herring, P.K.; van Vlijmen, B.; Berliner, M.D.; Bazant, M.Z.; Braatz, R.D.; Chueh, W.C.; Storey, B.D. Perspective-Combining Physics and Machine Learning to Predict Battery Lifetime. J. Electrochem. Soc. 2021, 168, 030525. [Google Scholar] [CrossRef]
- Merla, Y.; Wu, B.; Yufit, V.; Brandon, N.P.; Martinez-Botas, R.F.; Offer, G.J. Extending battery life: A low-cost practical diagnostic technique for lithium-ion batteries. J. Power Source 2016, 331, 224–231. [Google Scholar] [CrossRef]
- Feng, T.H.; Yang, L.; Zhao, X.W.; Zhang, H.D.; Qiang, J.X. Online identification of lithium-ion battery parameters based on an improved equivalent-circuit model and its implementation on battery state-of-power prediction. J. Power Source 2015, 281, 192–203. [Google Scholar] [CrossRef]
- Dai, H.F.; Xu, T.J.; Zhu, L.T.; Wei, X.Z.; Sun, Z.C. Adaptive model parameter identification for large capacity Li-ion batteries on separated time scales. Appl. Energy 2016, 184, 119–131. [Google Scholar] [CrossRef]
- Lai, X.; Zheng, Y.J.; Sun, T. A comparative study of different equivalent circuit models for estimating state-of-charge of lithium-ion batteries. Electrochim. Acta 2018, 259, 566–577. [Google Scholar] [CrossRef]
- Thompson, A.W. Economic implications of lithium ion battery degradation for Vehicle-to-Grid (V2X) services. J. Power Source 2018, 396, 691–709. [Google Scholar] [CrossRef]
- Yu, H.; Li, J.; Ji, Y.; Pecht, M. Life-cycle parameter identification method of an electrochemical model for lithium-ion battery pack. J. Energy Storage 2022, 47, 103591. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, S.; Wang, W.; Yu, H.; Xie, H.; Wang, H.; Yang, S.; Zhang, C.; Liu, X. Enabling dendrite-free charging for lithium batteries based on transport-reaction competition mechanism in CHAIN framework. J. Energy Chem. 2022, 75, 408–421. [Google Scholar] [CrossRef]
- Jin, X.; Vora, A.; Hoshing, V.; Saha, T.; Shaver, G.; Garcia, R.E.; Wasynczuk, O.; Varigonda, S. Physically-based reduced-order capacity loss model for graphite anodes in Li-ion battery cells. J. Power Source 2017, 342, 750–761. [Google Scholar] [CrossRef]
- Li, J.; Adewuyi, K.; Lotfi, N.; Landers, R.G.; Park, J. A single particle model with chemical/mechanical degradation physics for lithium ion battery State of Health (SOH) estimation. Appl. Energy 2018, 212, 1178–1190. [Google Scholar] [CrossRef]
- Dong, H.C.; Jin, X.N.; Lou, Y.B.; Wang, C.H. Lithium-ion battery state of health monitoring and remaining useful life prediction based on support vector regression-particle filter. J. Power Source 2014, 271, 114–123. [Google Scholar] [CrossRef]
- Li, Y.; Wei, Z.B.; Xiong, B.Y.; Vilathgamuwa, D.M. Adaptive Ensemble-Based Electrochemical-Thermal Degradation State Estimation of Lithium-Ion Batteries. IEEE Trans. Ind. Electron. 2022, 69, 6984–6996. [Google Scholar] [CrossRef]
- Richardson, R.R.; Osborne, M.A.; Howey, D.A. Gaussian process regression for forecasting battery state of health. J. Power Source 2017, 357, 209–219. [Google Scholar] [CrossRef]
- Hu, C.; Jain, G.; Zhang, P.Q.; Schmidt, C.; Gomadam, P.; Gorka, T. Data-driven method based on particle swarm optimization and k-nearest neighbor regression for estimating capacity of lithium-ion battery. Appl. Energy 2014, 129, 49–55. [Google Scholar] [CrossRef]
- Khumprom, P.; Yodo, N. A Data-Driven Predictive Prognostic Model for Lithium-ion Batteries based on a Deep Learning Algorithm. Energies 2019, 12, 660. [Google Scholar] [CrossRef]
- Li, P.H.; Zhang, Z.J.; Xiong, Q.Y.; Ding, B.C.; Hou, J.; Luo, D.C.; Rong, Y.J.; Li, S.Y. State-of-health estimation and remaining useful life prediction for the lithium-ion battery based on a variant long short term memory neural network. J. Power Source 2020, 459, 228069. [Google Scholar] [CrossRef]
- Hong, J.C.; Wang, Z.P.; Chen, W.; Wang, L.Y.; Lin, P.; Qu, C.H. Online accurate state of health estimation for battery systems on real-world electric vehicles with variable driving conditions considered. J. Clean. Prod. 2021, 294, 125814. [Google Scholar] [CrossRef]
- Lin, H.Y.; Kang, L.Y.; Xie, D.; Linghu, J.Q.; Li, J. Online State-of-Health Estimation of Lithium-Ion Battery Based on Incremental Capacity Curve and BP Neural Network. Batteries 2022, 8, 29. [Google Scholar] [CrossRef]
- Zhang, S.Z.; Zhai, B.Y.; Guo, X.; Wang, K.K.; Peng, N.A.; Zhang, X.W. Synchronous estimation of state of health and remaining useful lifetime for lithium-ion battery using the incremental capacity and artificial neural networks. J. Energy Storage 2019, 26, 100951. [Google Scholar] [CrossRef]
- Li, X.Y.; Yuan, C.G.; Wang, Z.P. State of health estimation for Li-ion battery via partial incremental capacity analysis based on support vector regression. Energy 2020, 203, 117852. [Google Scholar] [CrossRef]
- Leng, F.; Tan, C.M.; Pecht, M. Effect of Temperature on the Aging rate of Li Ion Battery Operating above Room Temperature. Sci. Rep. 2015, 5, 12967. [Google Scholar] [CrossRef]
- Shibagaki, T.; Merla, Y.; Offer, G.J. Tracking degradation in lithium iron phosphate batteries using differential thermal voltammetry. J. Power Source 2018, 374, 188–195. [Google Scholar] [CrossRef]
- Merla, Y.; Wu, B.; Yufit, V.; Brandon, N.P.; Martinez-Botas, R.F.; Offer, G.J. Novel application of differential thermal voltammetry as an in-depth state-of-health diagnosis method for lithium-ion batteries. J. Power Source 2016, 307, 308–319. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, L.; Yu, H.; Yang, X.; Zhang, T.; Chen, S.; Liang, F.; Wang, H.; Lu, X.; Yang, S.; et al. Early Prediction of the Health Conditions for Battery Cathodes Assisted by the Fusion of Feature Signal Analysis and Deep-Learning Techniques. Batteries 2022, 8, 151. [Google Scholar] [CrossRef]
- Dai, H.D.; Zhao, G.C.; Lin, M.Q.; Wu, J.; Zheng, G.F. A Novel Estimation Method for the State of Health of Lithium-Ion Battery Using Prior Knowledge-Based Neural Network and Markov Chain. IEEE Trans. Ind. Electron. 2019, 66, 7706–7716. [Google Scholar] [CrossRef]
- Patil, M.A.; Tagade, P.; Hariharan, K.S.; Kolake, S.M.; Song, T.; Yeo, T.; Doo, S. A novel multistage Support Vector Machine based approach for Li ion battery remaining useful life estimation. Appl. Energy 2015, 159, 285–297. [Google Scholar] [CrossRef]
- Wang, Z.; Yuan, C.; Li, X. Lithium Battery State-of-Health Estimation via Differential Thermal Voltammetry With Gaussian Process Regression. IEEE Trans. Transp. Electrif. 2021, 7, 16–25. [Google Scholar] [CrossRef]
- Zhang, L.S.; Gao, X.L.; Liu, X.H.; Zhang, Z.J.; Cao, R.; Cheng, H.C.; Wang, M.Y.; Yan, X.Y.; Yang, S.C. CHAIN: Unlocking informatics-aided design of Li metal anode from materials to applications. Rare Met. 2022, 41, 1477–1489. [Google Scholar] [CrossRef]
- Yang, S.; He, R.; Zhang, Z.; Cao, Y.; Gao, X.; Liu, X. CHAIN: Cyber Hierarchy and Interactional Network Enabling Digital Solution for Battery Full-Lifespan Management. Matter 2020, 3, 27–41. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, Z.; Cao, R.; Wang, M.; Cheng, H.; Zhang, L.; Jiang, Y.; Li, Y.; Chen, B.; Ling, H.; et al. Implementation for a cloud battery management system based on the CHAIN framework. Energy AI 2021, 5, 100088. [Google Scholar] [CrossRef]
- Goebel, K.; Saha, B.; Saxena, A.; Celaya, J.R.; Christophersen, J.P. Prognostics in Battery Health Management. IEEE Instrum. Meas. Mag. 2008, 11, 33–40. [Google Scholar] [CrossRef]
- Birkl, C. Diagnosis and Prognosis of Degradation in Lithium-Ion Batteries. Ph.D. Thesis, University of Oxford, Oxford, UK, 2017. [Google Scholar]
- Birkl, C. Oxford Battery Degradation Dataset 1. Ph.D. Thesis, University of Oxford, Oxford, UK, 2017. [Google Scholar]
- Wu, B.; Yufit, V.; Merla, Y.; Martinez-Botas, R.F.; Brandon, N.P.; Offer, G.J. Differential thermal voltammetry for tracking of degradation in lithium-ion batteries. J. Power Source 2015, 273, 495–501. [Google Scholar] [CrossRef]
- Cavalheiro, G.; Iriyama, T.; Nelson, G.; Huang, S.; Zhang, G. Effects of Non-Uniform Temperature Distribution on Degradation of Lithium-ion Batteries. J. Electrochem. Energy Convers. Storage 2019, 17, 021101. [Google Scholar] [CrossRef]
- Tong, Z.; Miao, J.; Tong, S.; Lu, Y. Early prediction of remaining useful life for Lithium-ion batteries based on a hybrid machine learning method. J. Clean. Prod. 2021, 317, 128265. [Google Scholar] [CrossRef]
- Zheng, S.; Ristovski, K.; Farahat, A.; Gupta, C. Long Short-Term Memory Network for Remaining Useful Life estimation. In Proceedings of the 2017 IEEE International Conference on Prognostics and Health Management (ICPHM), Dallas, TX, USA, 19–21 June 2017; pp. 88–95. [Google Scholar]
- Zhang, J.a.; Wang, P.; Gong, Q.; Cheng, Z. SOH estimation of lithium-ion batteries based on least squares support vector machine error compensation model. J. Power Electron. 2021, 21, 1712–1723. [Google Scholar] [CrossRef]
- Lin, M.; Wu, D.; Meng, J.; Wu, J.; Wu, H. A multi-feature-based multi-model fusion method for state of health estimation of lithium-ion batteries. J. Power Source 2022, 518, 230774. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Battery | B5 | B6 | B7 | B18 |
|---|---|---|---|---|
| Cathode material | NCA | |||
| Nominal capacity [Ah] | 2 | 2 | 2 | 2 |
| Charge cut-off voltage [V] | 4.2 | 4.2 | 4.2 | 4.2 |
| Discharging cut-off voltage [V] | 2.7 | 2.5 | 2.2 | 2.5 |
| Charge rate | 0.75C | 0.75C | 0.75C | 0.75C |
| Discharge rate | 1C | 1C | 1C | 1C |
| Technical Specifications | Cycling Tests | ||
|---|---|---|---|
| Anode material | Graphite | Charge test | CC charge at 2C |
| Cathode material | LCO/NCO | ||
| Nominal capacity [Ah] | 0.74 | ||
| Nominal voltage [V] | 3.7 | ||
| Discharge cut-off voltage [V] | 2.7 | Discharge test | Artemis drive cycle discharge |
| Charge cut-off voltage [V] | 4.2 | ||
| Method | DTV | SVD | IC | TVC | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Features | FV1 | FV2 | FV3 | FV4 | FV5 | FV6 | FV7 | FV8 | FV9 | FV10 | FV11 |
| B5 | 0.55 | 0.94 | 0.57 | 0.94 | 0.49 | 0.98 | 0.98 | 0.98 | 0.99 | 0.94 | 0.99 |
| B6 | 0.11 | 0.98 | 0.83 | 0.95 | 0.70 | 0.98 | 0.97 | 0.98 | 0.98 | 0.98 | 0.99 |
| B7 | 0.41 | 0.92 | 0.33 | 0.87 | 0.06 | 0.97 | 0.98 | 0.99 | 0.98 | 0.92 | 0.98 |
| B18 | 0.50 | 0.91 | 0.93 | 0.83 | 0.74 | 0.98 | 0.99 | 0.98 | 0.99 | 0.95 | 0.99 |
| Method | DTV | SVD | IC | TVC | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Features | FV1 | FV2 | FV3 | FV4 | FV5 | FV6 | FV7 | FV8 | FV9 | FV10 | FV11 |
| Cell1 | 0.80 | 0.11 | 0.85 | 0.53 | 0.71 | 0.98 | 0.99 | 0.99 | 0.95 | 0.97 | 0.98 |
| Cell3 | 0.88 | 0.29 | 0.83 | 0.22 | 0.82 | 0.97 | 0.98 | 0.99 | 0.94 | 0.95 | 0.96 |
| Cell4 | 0.84 | 0.43 | 0.86 | 0.53 | 0.71 | 0.98 | 0.99 | 0.99 | 0.93 | 0.95 | 0.98 |
| Cell6 | 0.86 | 0.08 | 0.83 | 0.55 | 0.52 | 0.97 | 0.99 | 0.97 | 0.83 | 0.95 | 0.99 |
| Cell7 | 0.90 | 0.64 | 0.91 | 0.18 | 0.60 | 0.97 | 0.98 | 0.99 | 0.84 | 0.94 | 0.99 |
| Cell8 | 0.95 | 0.61 | 0.96 | 0.02 | 0.90 | 0.97 | 0.99 | 0.99 | 0.93 | 0.92 | 0.98 |
| Method | Proportion of Training Set | Feature | RMSE (%) | |||
|---|---|---|---|---|---|---|
| #5 | #6 | #7 | #18 | |||
| Ours | 40% | Multiple features | 0.62 | 0.77 | 0.61 | 0.93 |
| SVR [54] | 50% | Voltege, Current | 3.3 | - | - | - |
| AD-LSTM [54] | 30% | Voltege, Cur-rent | 3.0 | 3.3 | 2.0 | - |
| GPR [44] | 20% | DTV | 0.27 | 0.28 | 0.32 | 0.31 |
| LSSVM-ECM [55] | - | DV_DT | - | 2.5 | 1.7 | - |
| EDM [55] | - | 11.3 | 2.7 | - | ||
| Method | Proportion of Training Set | Feature | RMSE (%) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| #1 | #2 | #3 | #4 | #5 | #6 | #7 | #8 | |||
| Ours | 40% | Multi-features | 0.32 | - | 0.31 | 0.44 | 0.45 | - | 0.37 | 0.56 |
| SVM [56] | - | Voltage Temperature ICA | 0.85 | 2.33 | 0.75 | 0.58 | 0.64 | 0.93 | 0.59 | 0.57 |
| MLR [56] | - | 0.84 | 2.02 | 0.73 | 0.55 | 0.60 | 0.97 | 0.37 | 0.43 | |
| GPR [56] | - | 0.94 | 2.11 | 0.81 | 0.45 | 0.51 | 0.94 | 0.53 | 0.62 | |
| Fusion of SVM MLR GPR [56] | - | 0.70 | 0.79 | 0.57 | 0.42 | 0.48 | 0.86 | 0.51 | 0.51 | |
| LSSVM-ECM [55] | - | DV_DT | - | 0.91 | 0.65 | - | 0.31 | 0.50 | 1.47 | 0.29 |
| EDM [55] | - | 1.65 | 0.96 | - | 1.94 | 1.46 | 3.23 | 1.39 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Ma, B.; Xie, H.; Wang, W.; Zou, B.; Liang, F.; Hua, X.; Liu, X.; Chen, S. Lithium-Ion Battery State of Health Estimation with Multi-Feature Collaborative Analysis and Deep Learning Method. Batteries 2023, 9, 120. https://doi.org/10.3390/batteries9020120
Yang X, Ma B, Xie H, Wang W, Zou B, Liang F, Hua X, Liu X, Chen S. Lithium-Ion Battery State of Health Estimation with Multi-Feature Collaborative Analysis and Deep Learning Method. Batteries. 2023; 9(2):120. https://doi.org/10.3390/batteries9020120
Chicago/Turabian StyleYang, Xianbin, Bin Ma, Haicheng Xie, Wentao Wang, Bosong Zou, Fengwei Liang, Xiao Hua, Xinhua Liu, and Siyan Chen. 2023. "Lithium-Ion Battery State of Health Estimation with Multi-Feature Collaborative Analysis and Deep Learning Method" Batteries 9, no. 2: 120. https://doi.org/10.3390/batteries9020120
APA StyleYang, X., Ma, B., Xie, H., Wang, W., Zou, B., Liang, F., Hua, X., Liu, X., & Chen, S. (2023). Lithium-Ion Battery State of Health Estimation with Multi-Feature Collaborative Analysis and Deep Learning Method. Batteries, 9(2), 120. https://doi.org/10.3390/batteries9020120