
Versatile AC Current Control Technique for a Battery Using Power Converters


Abstract
:1. Introduction
- A versatile controller is proposed which can inject AC current to a battery for zero, positive, and negative DC current i.e., it works for both offline and online (while charging and discharging).
- A controller gain selection method and controller architecture is developed for AC current injection considering small internal impedance and variable DC offset voltage of a battery.
- A procedure is developed to select topology, modulation, and passive components for AC current injection.
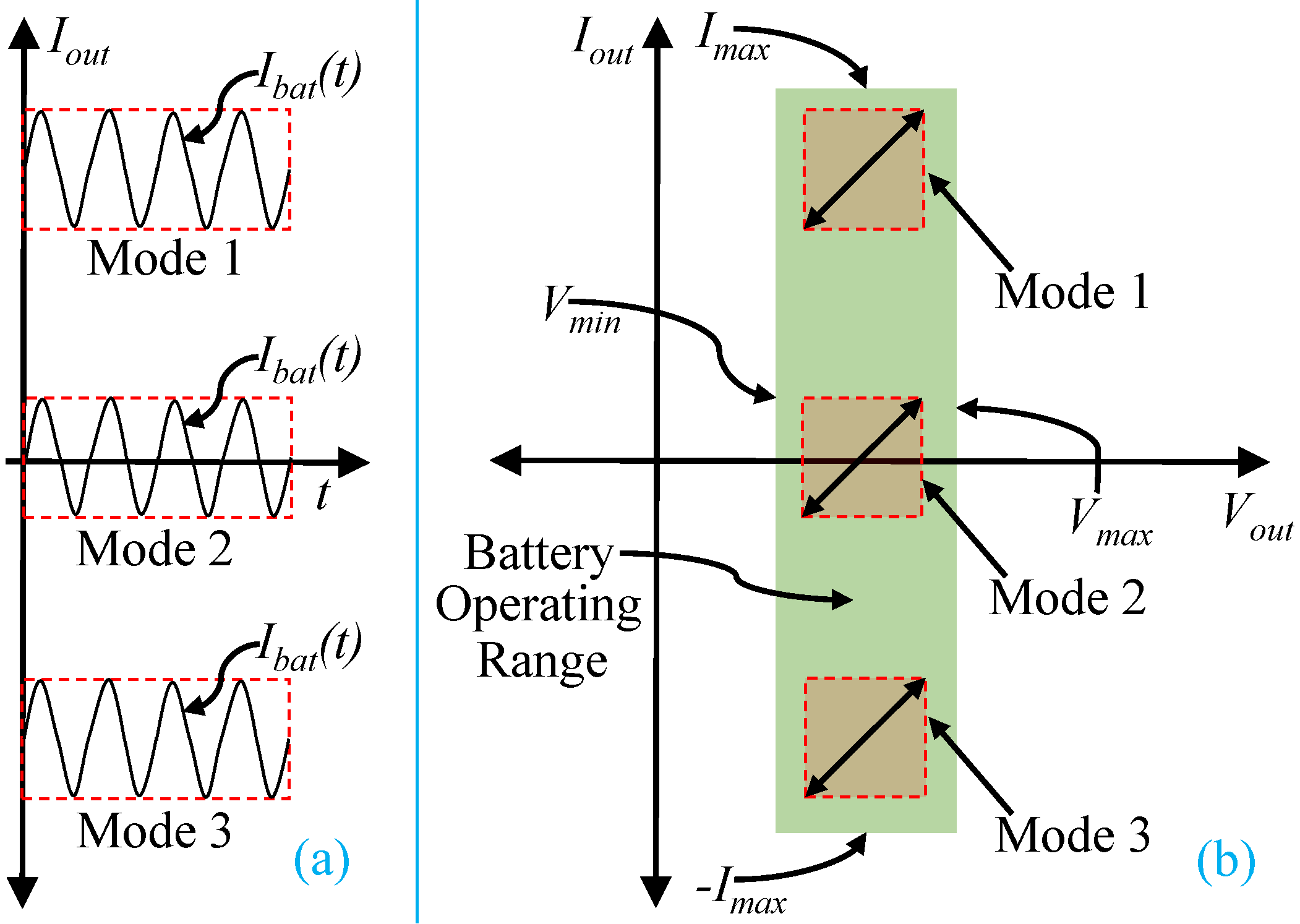
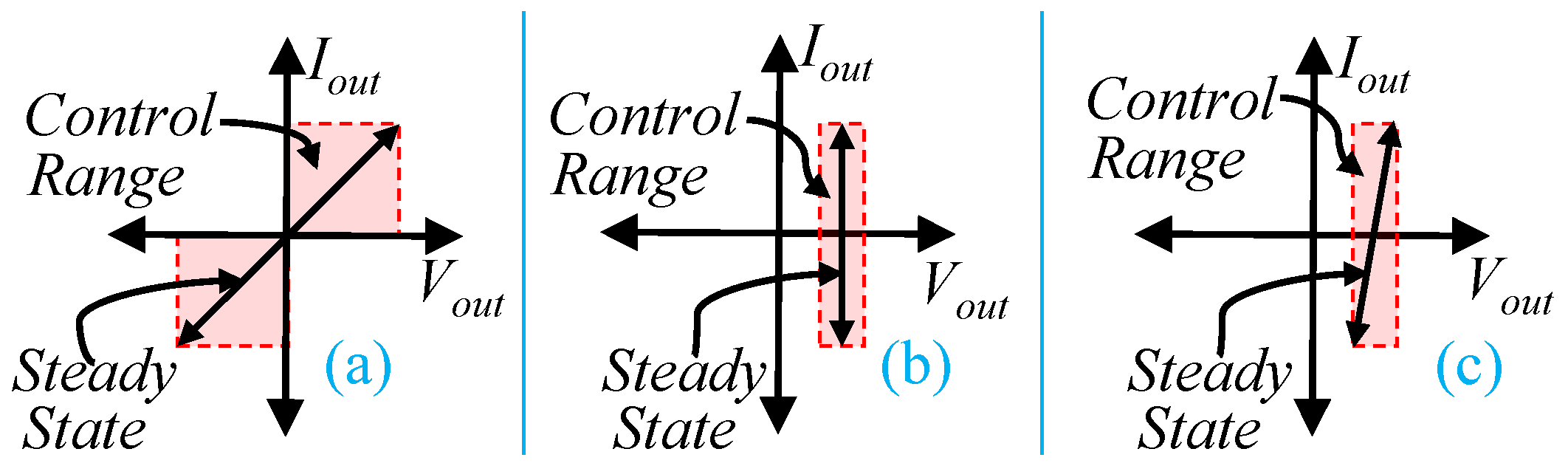
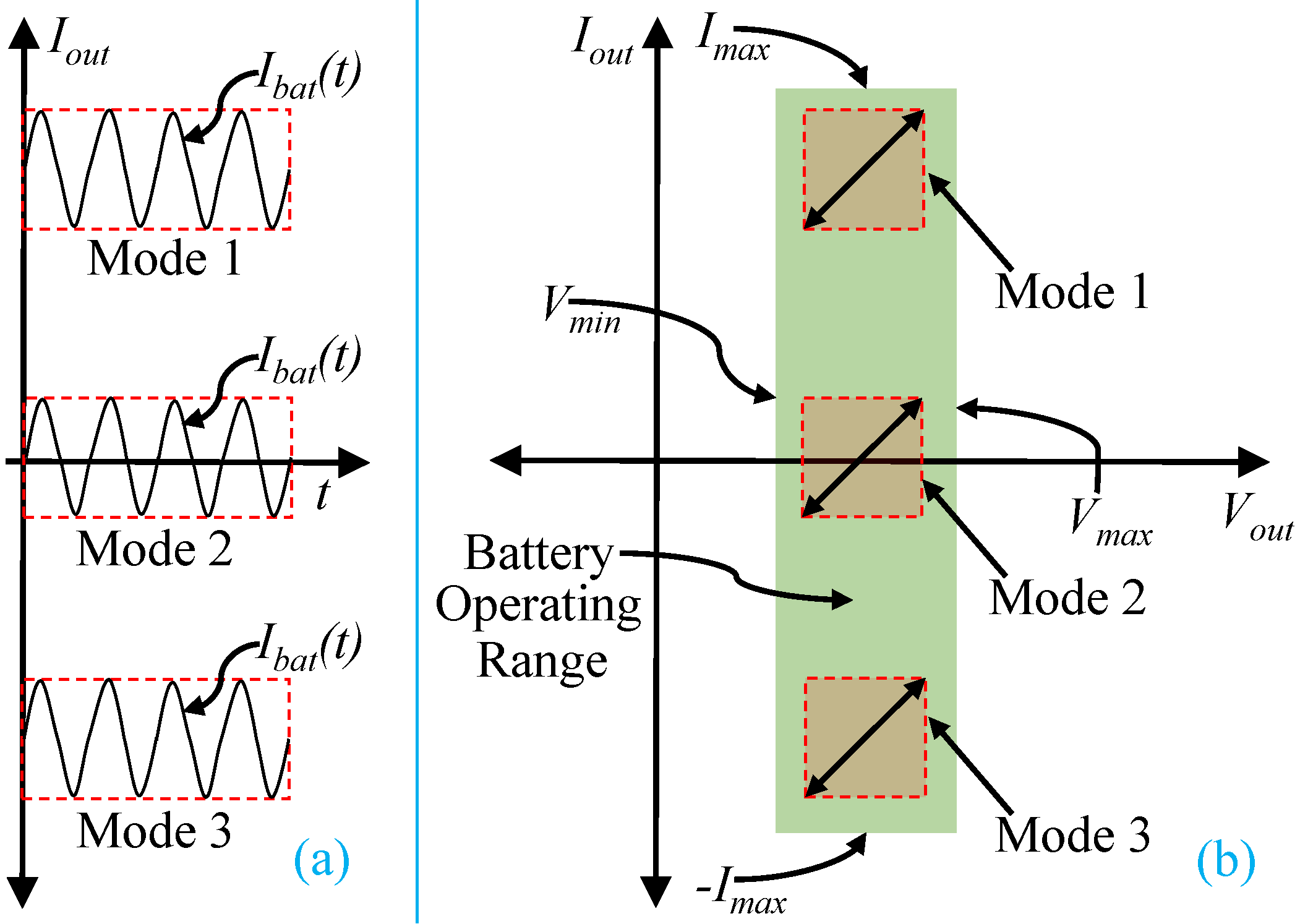
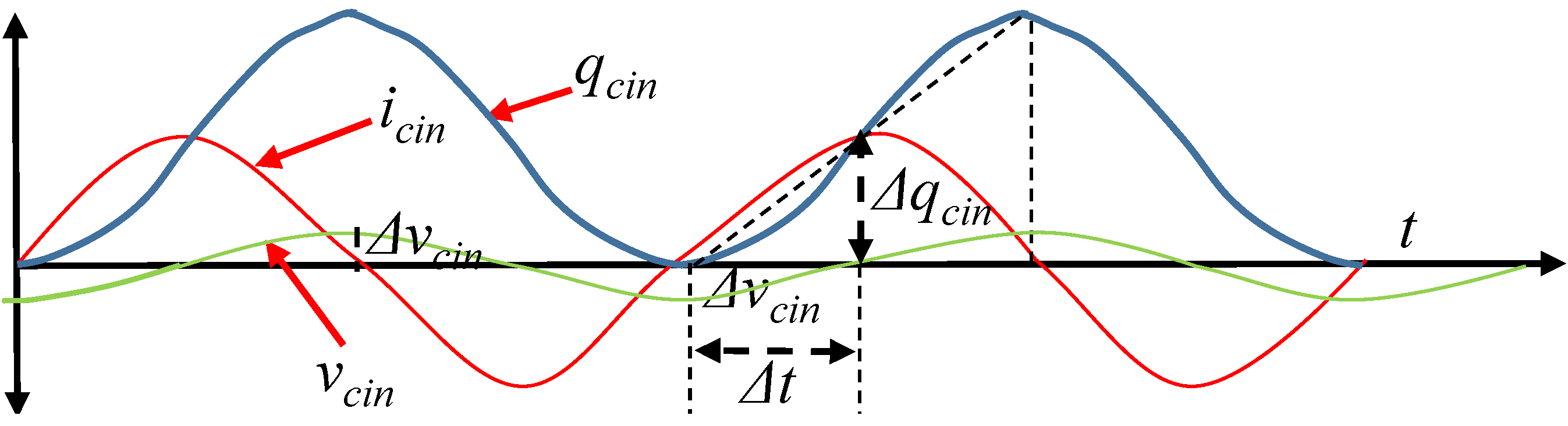
2. Operational Modes for AC Current Injection
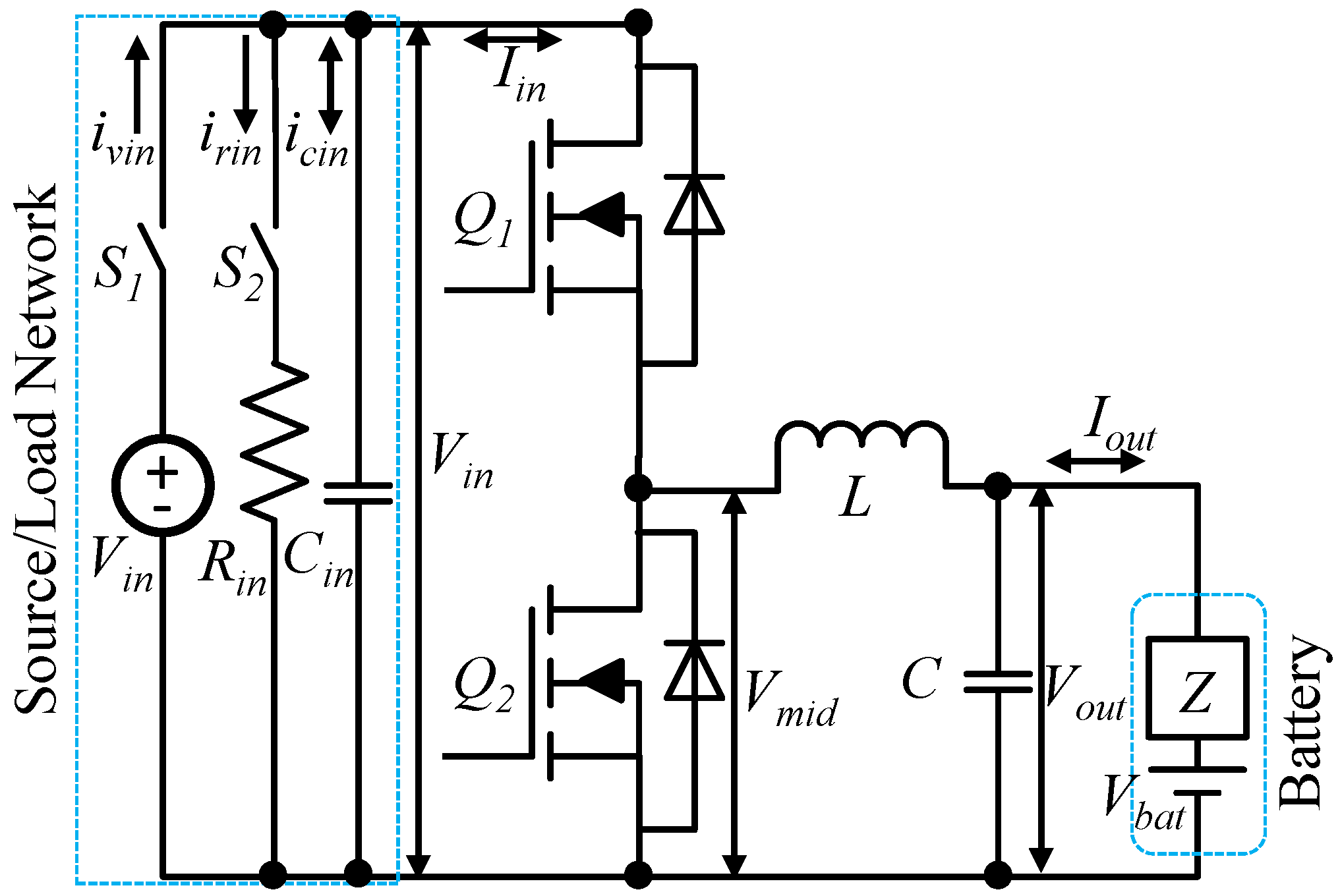
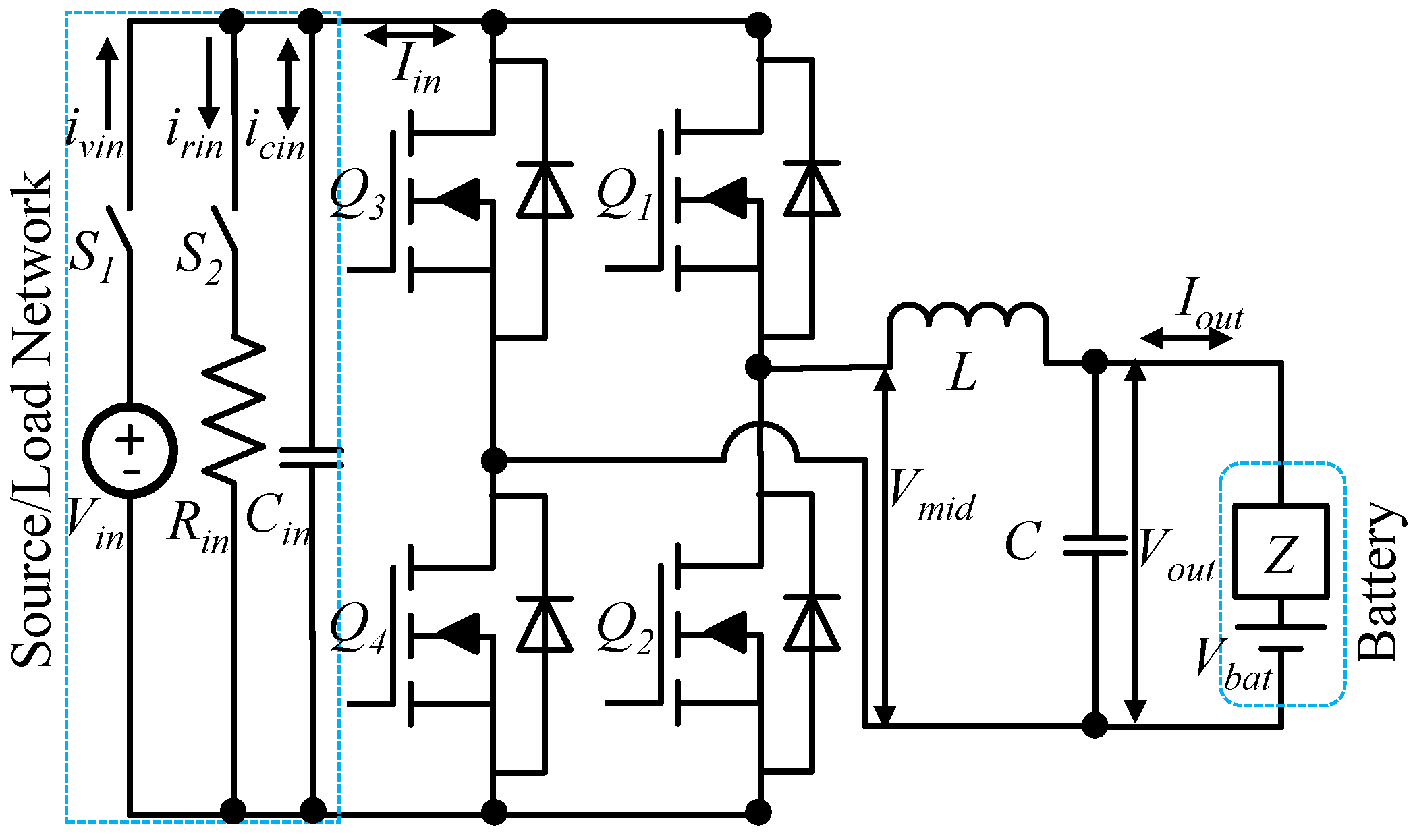
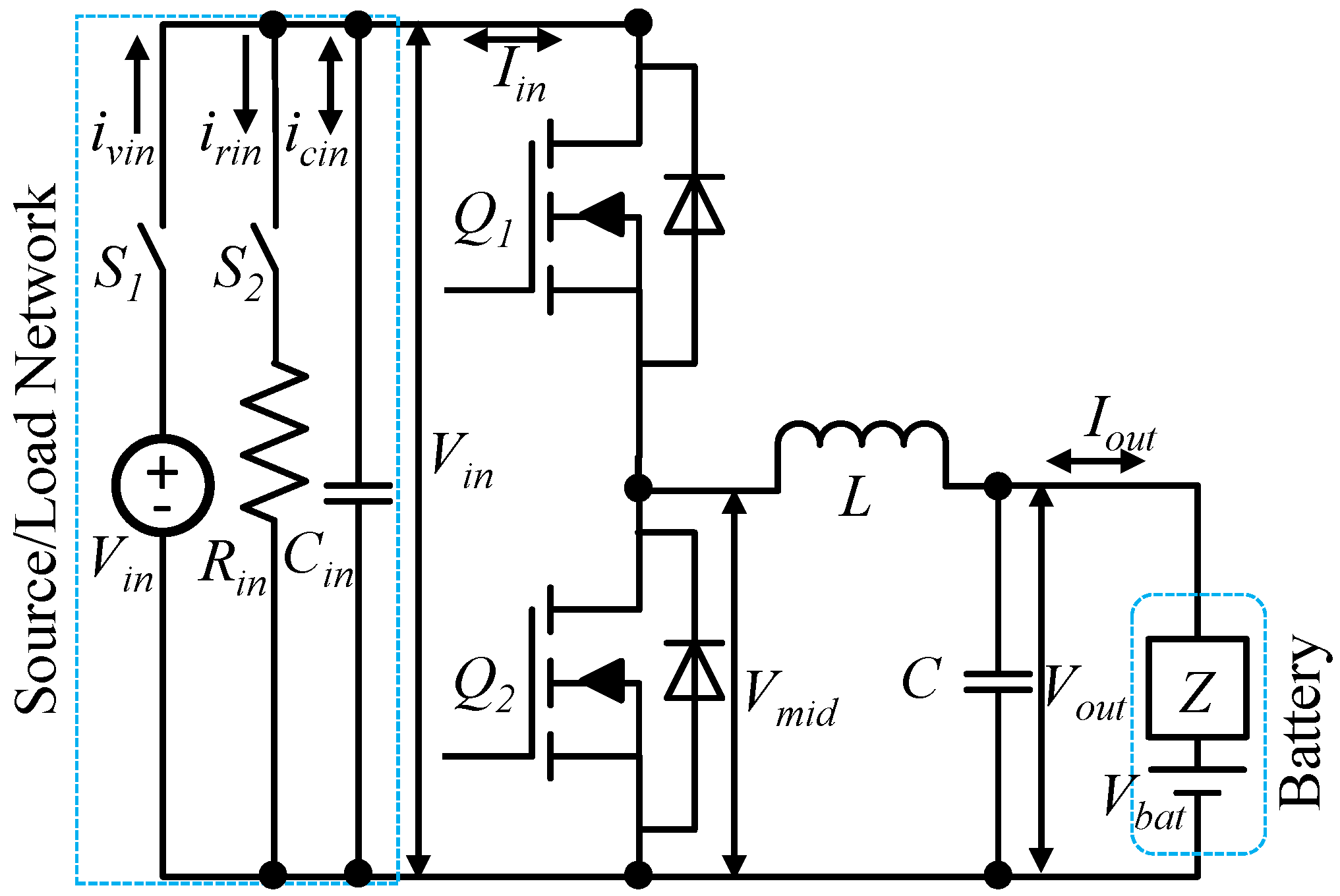
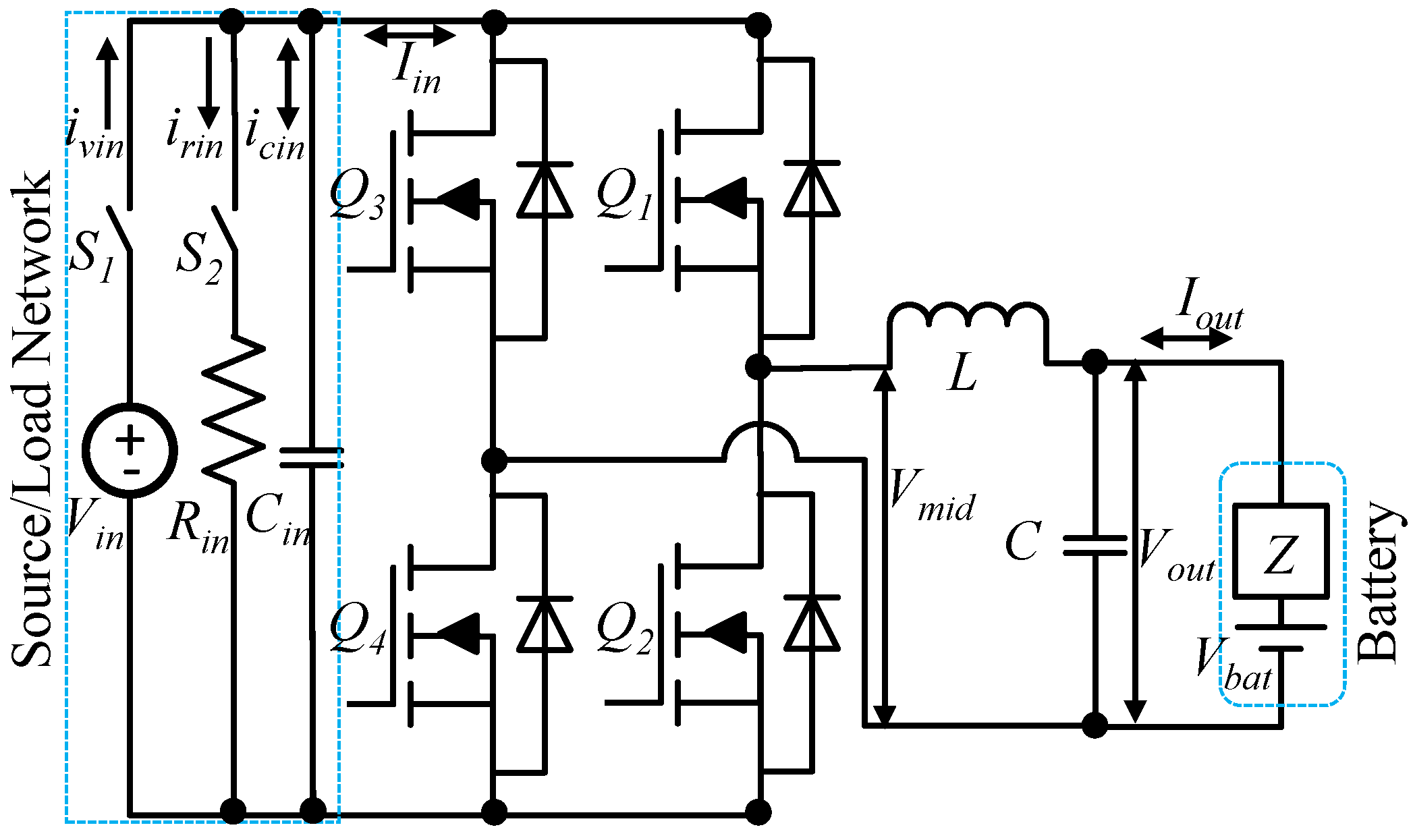
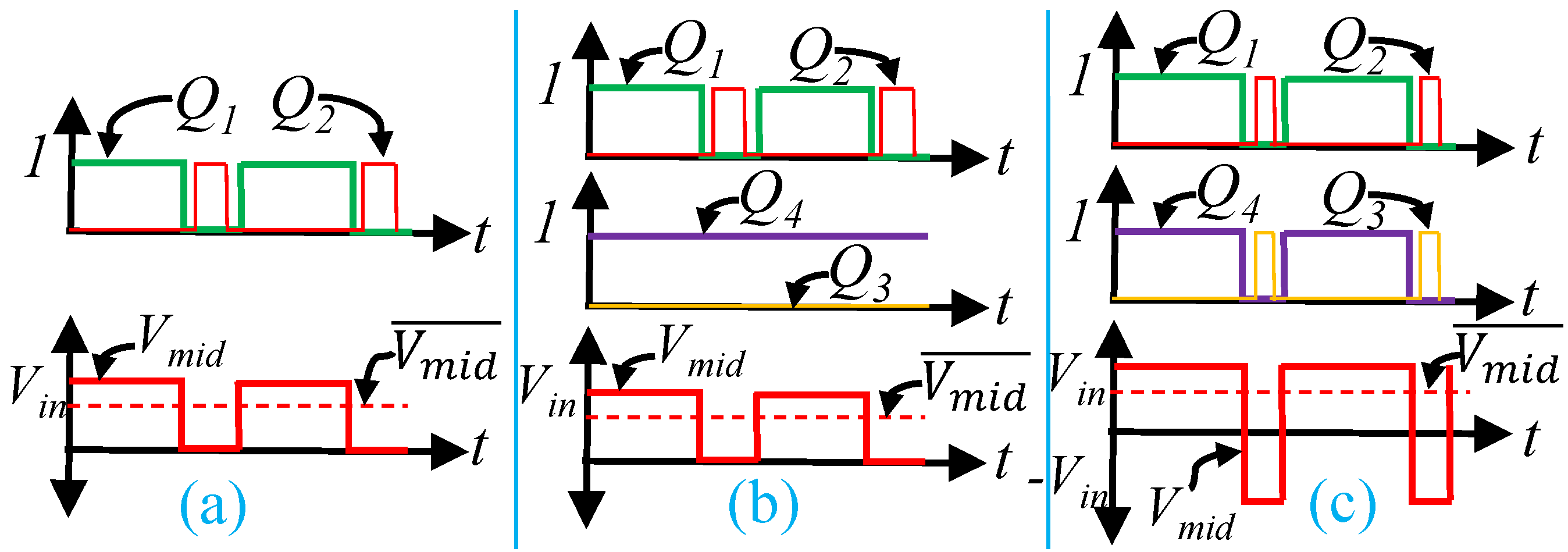
3. Topologies and Modulation
3.1. Design
3.2. Modulation
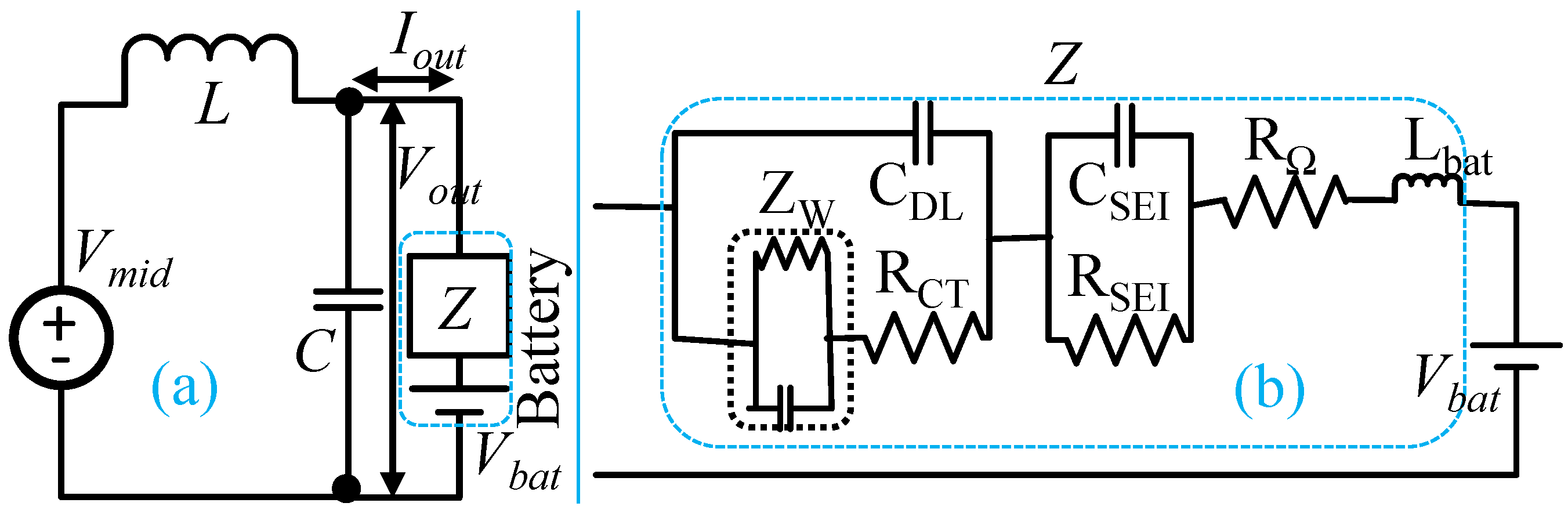
4. Small Signal Analysis
4.1. Simplified Model and Feedforward
4.2. Transfer Function of Switching Power Pole
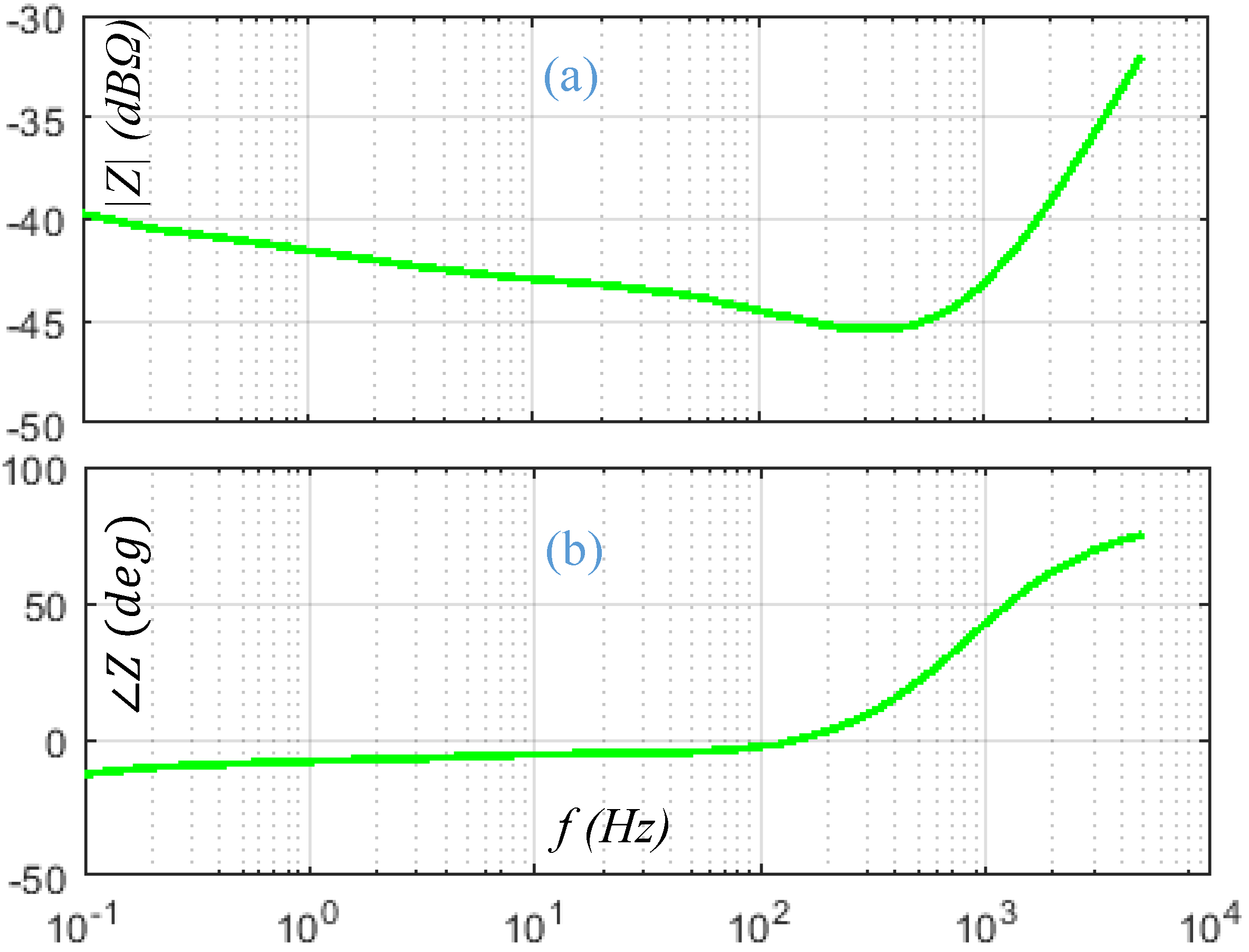
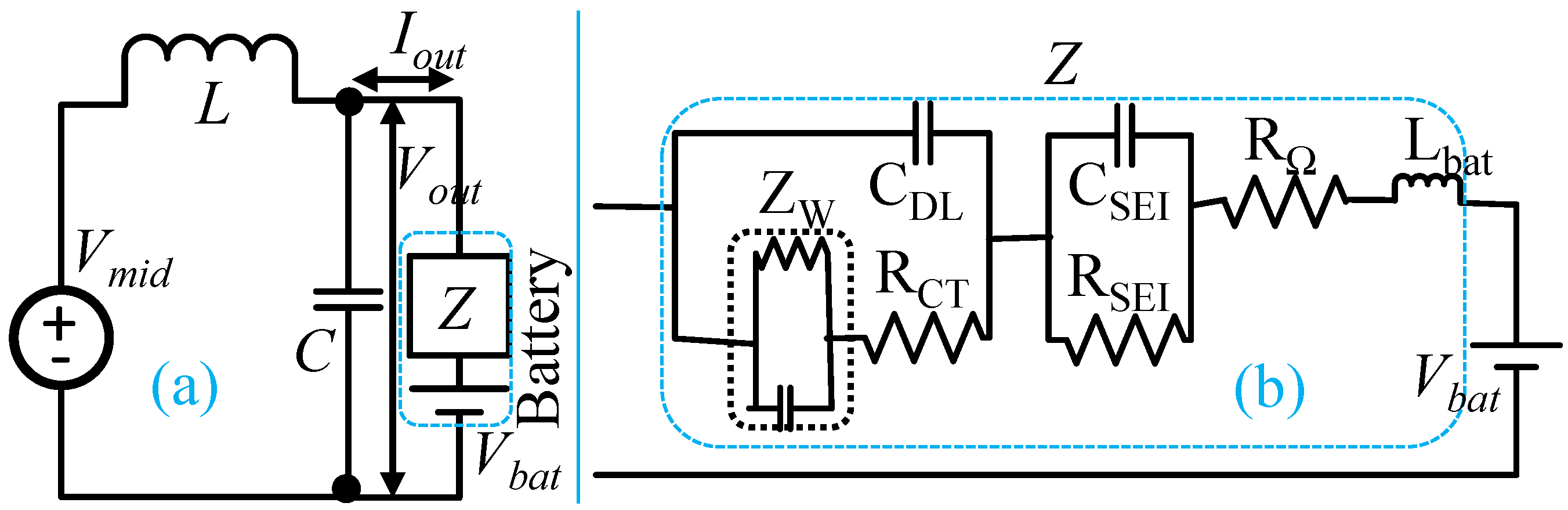
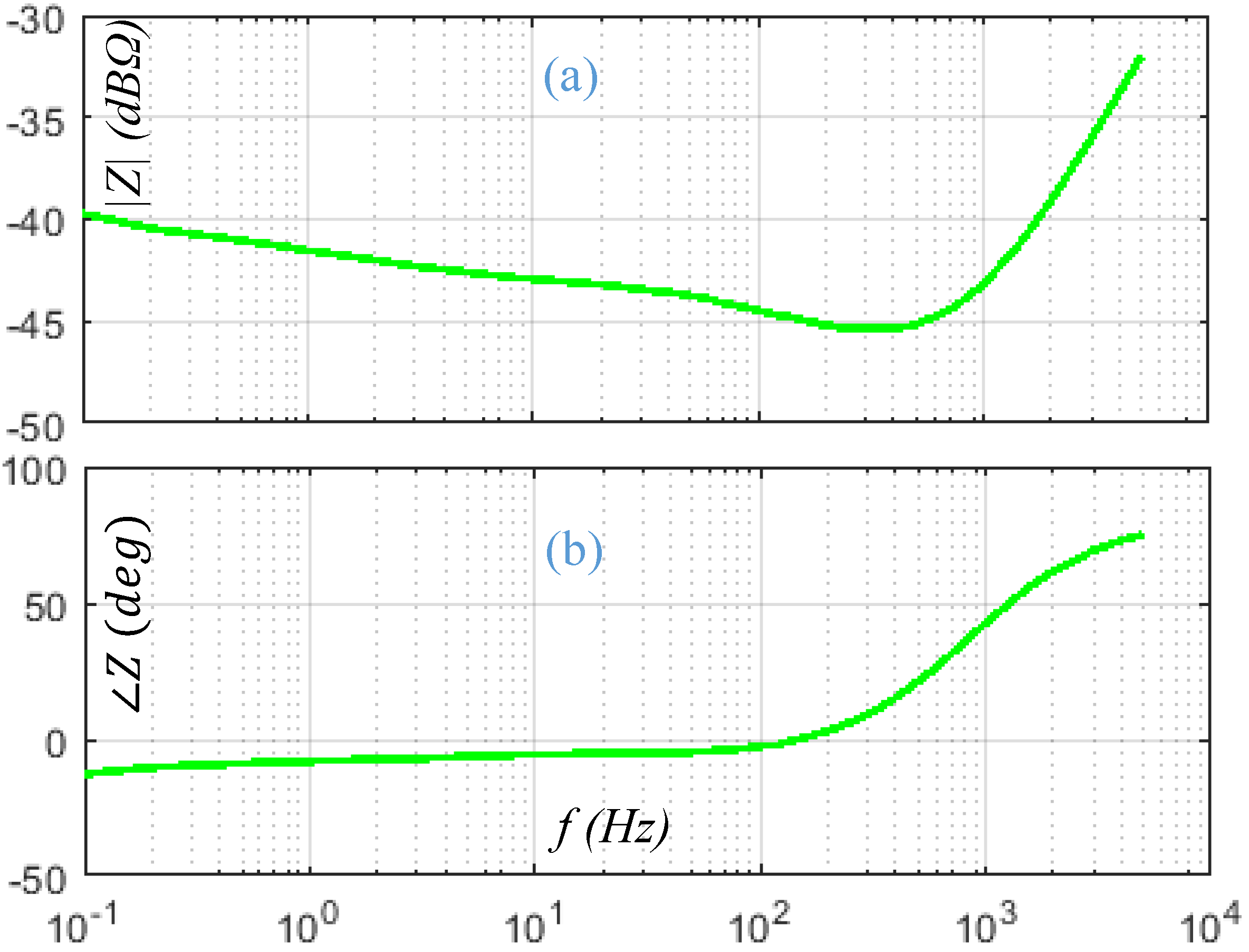
4.3. Battery Model
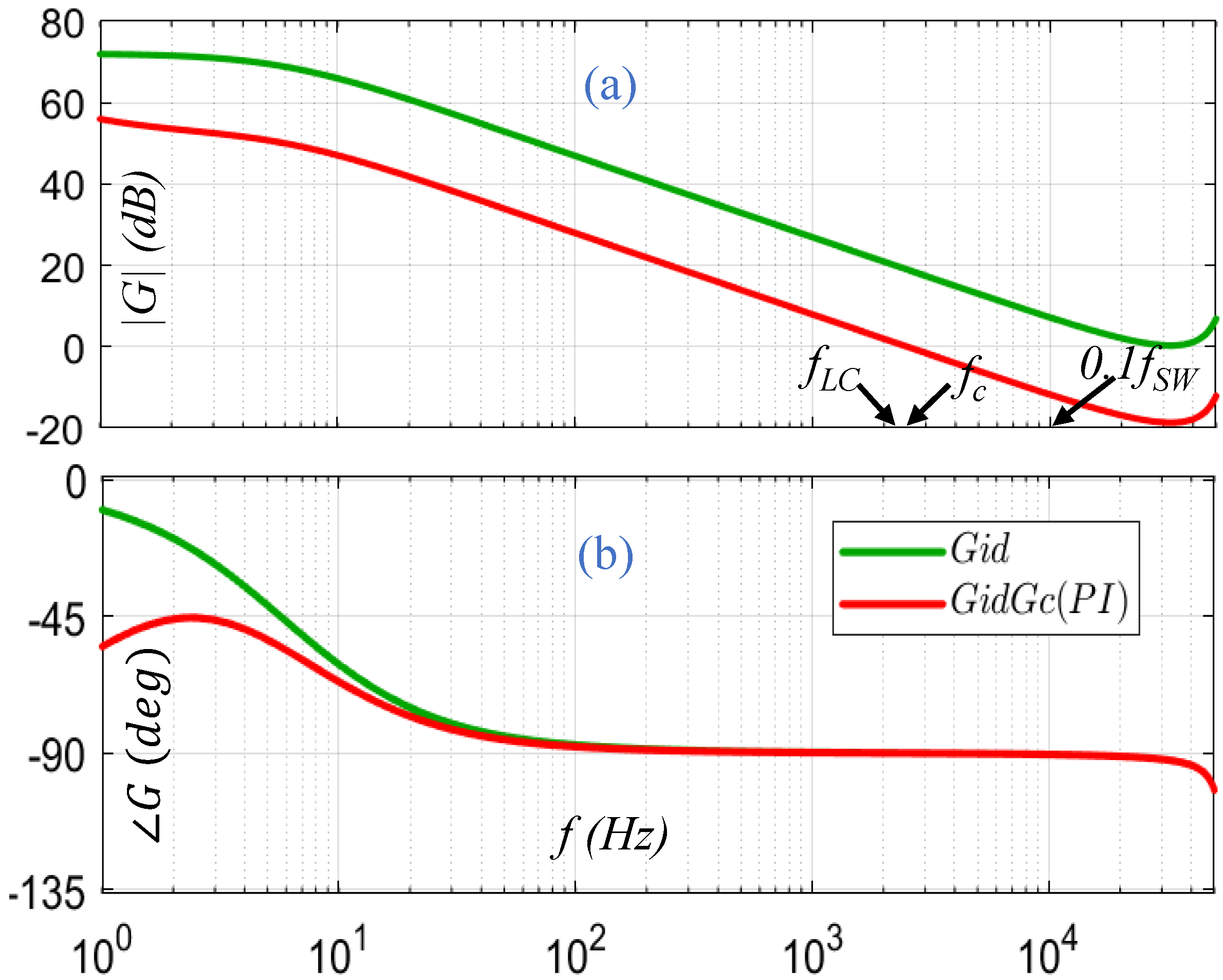
4.4. Open Loop Transfer Function
4.5. Feedback Compensator Design
4.5.1. Crossover Frequency Selection
4.5.2. Gain Adjustment
4.5.3. Phase Adjustment
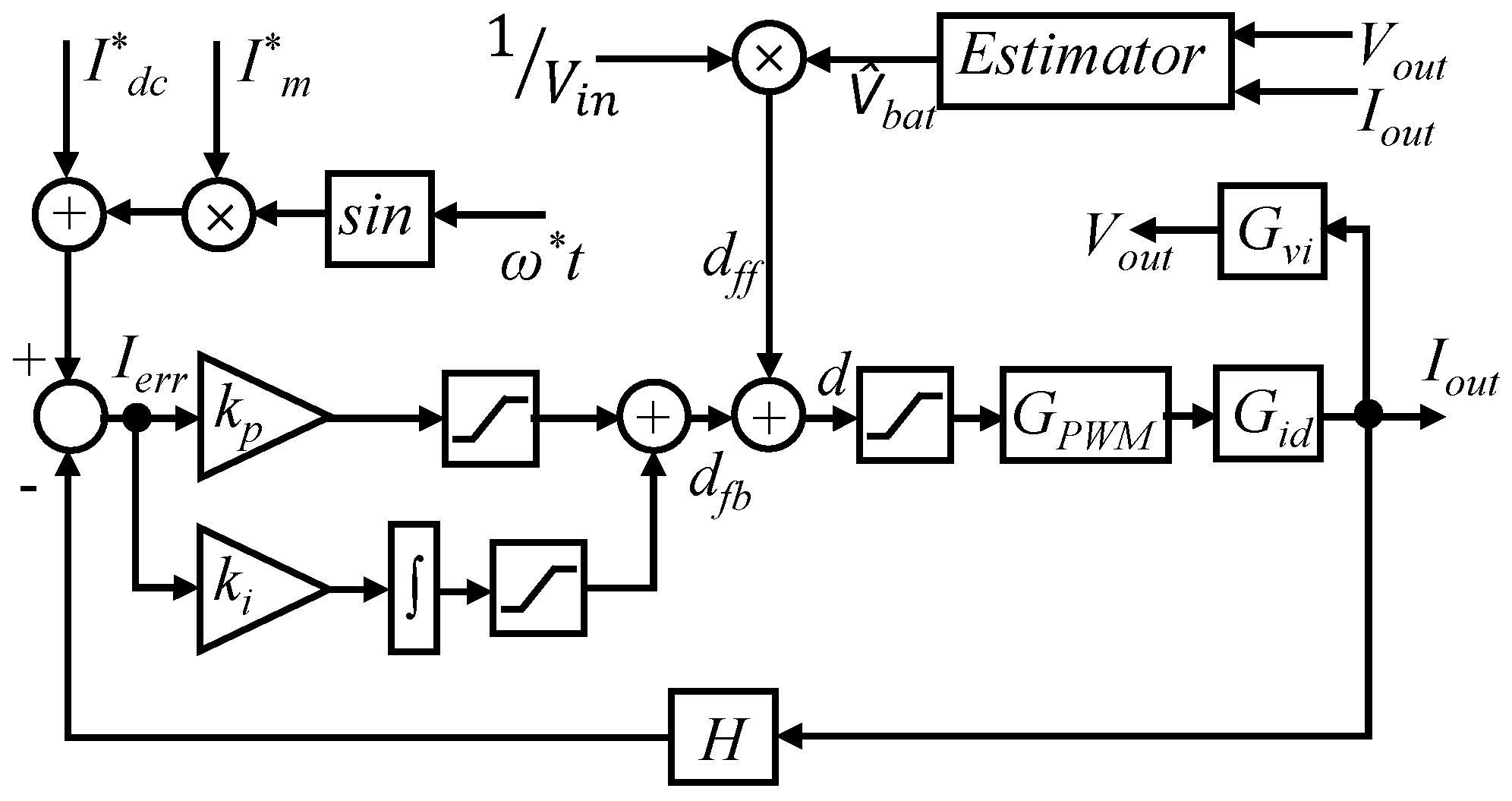
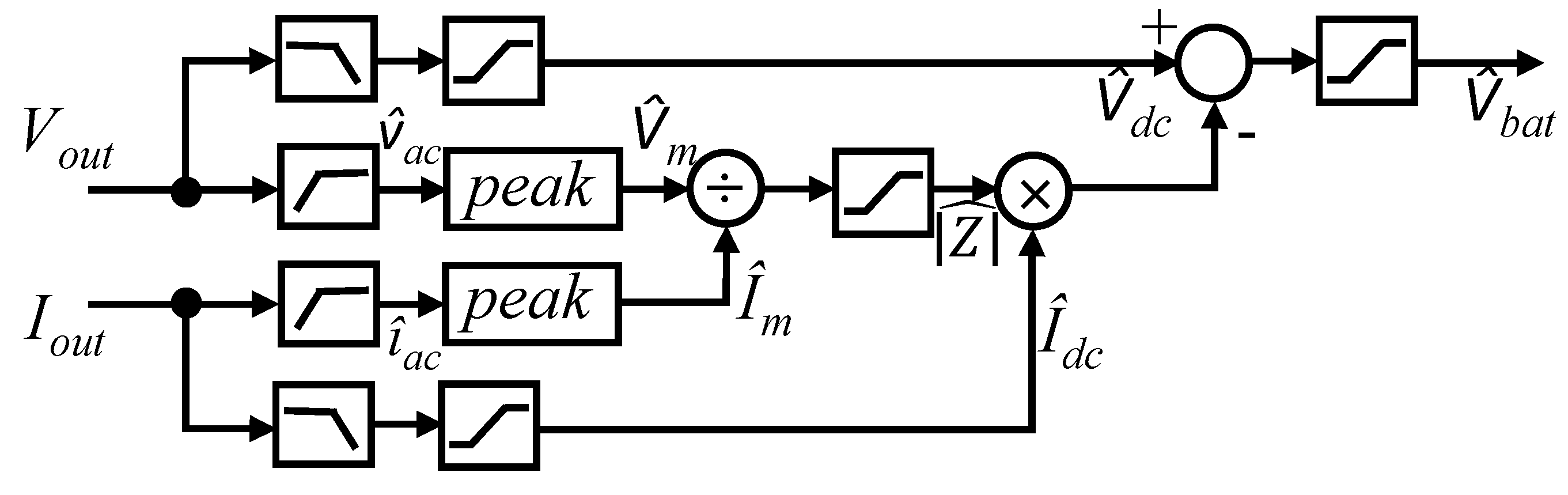
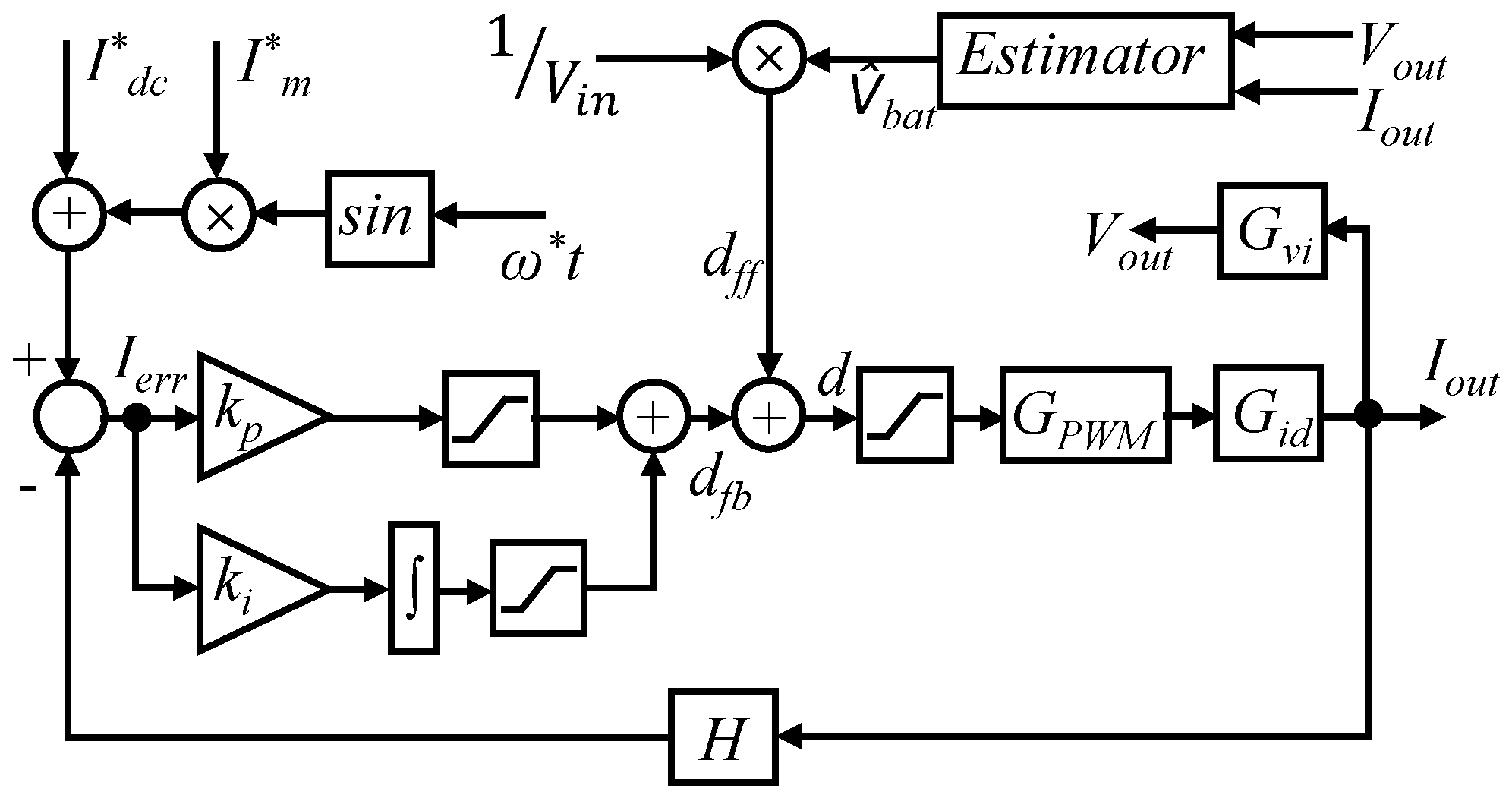
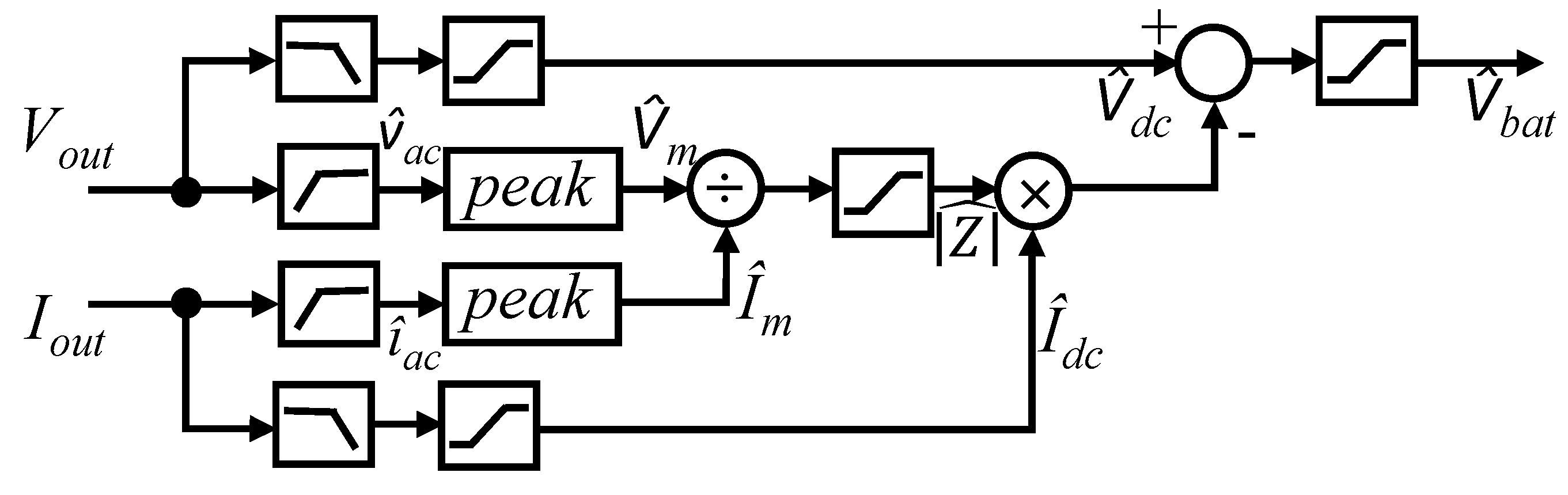
5. Controller Architecture
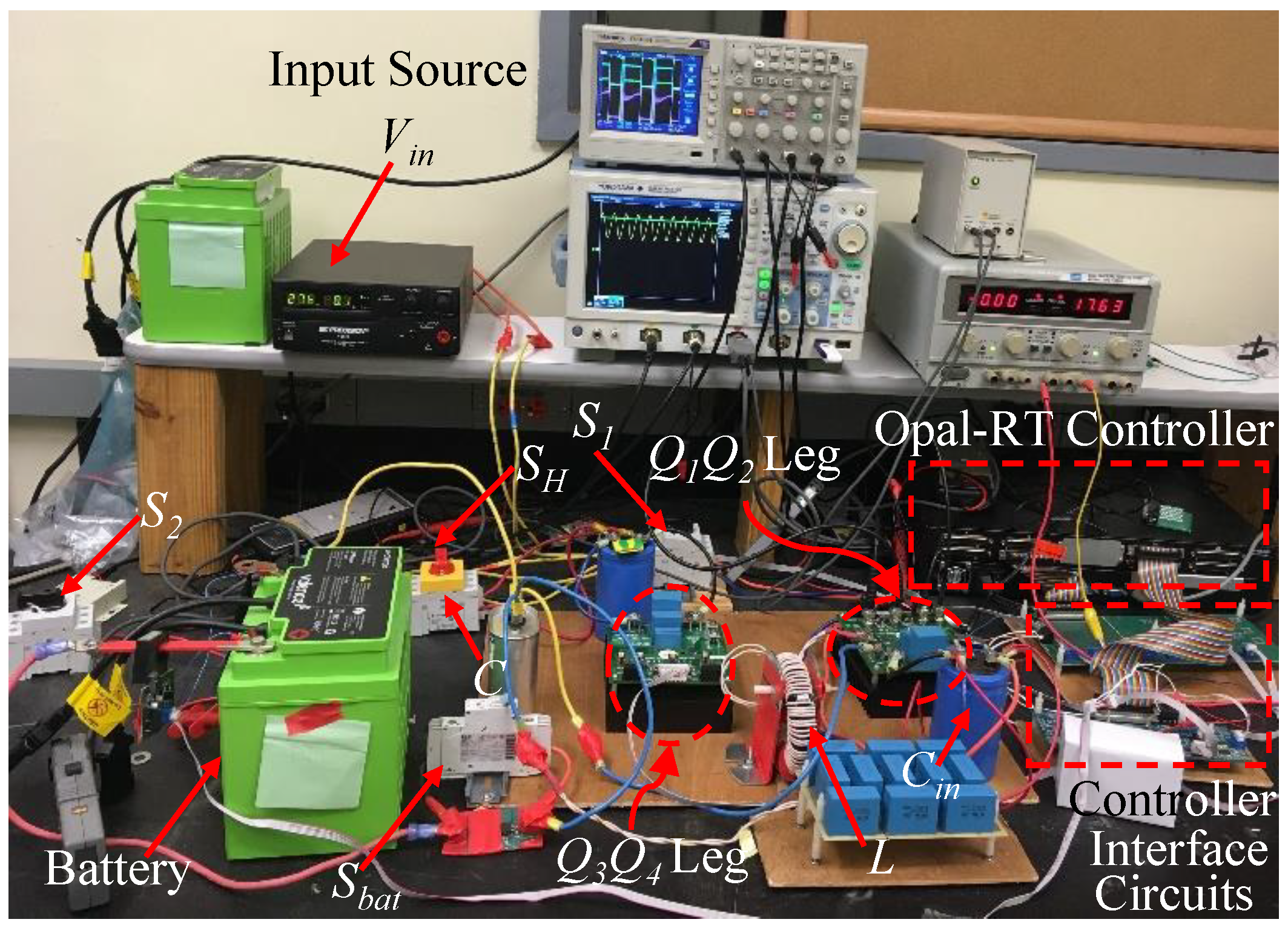
6. Experimental Results
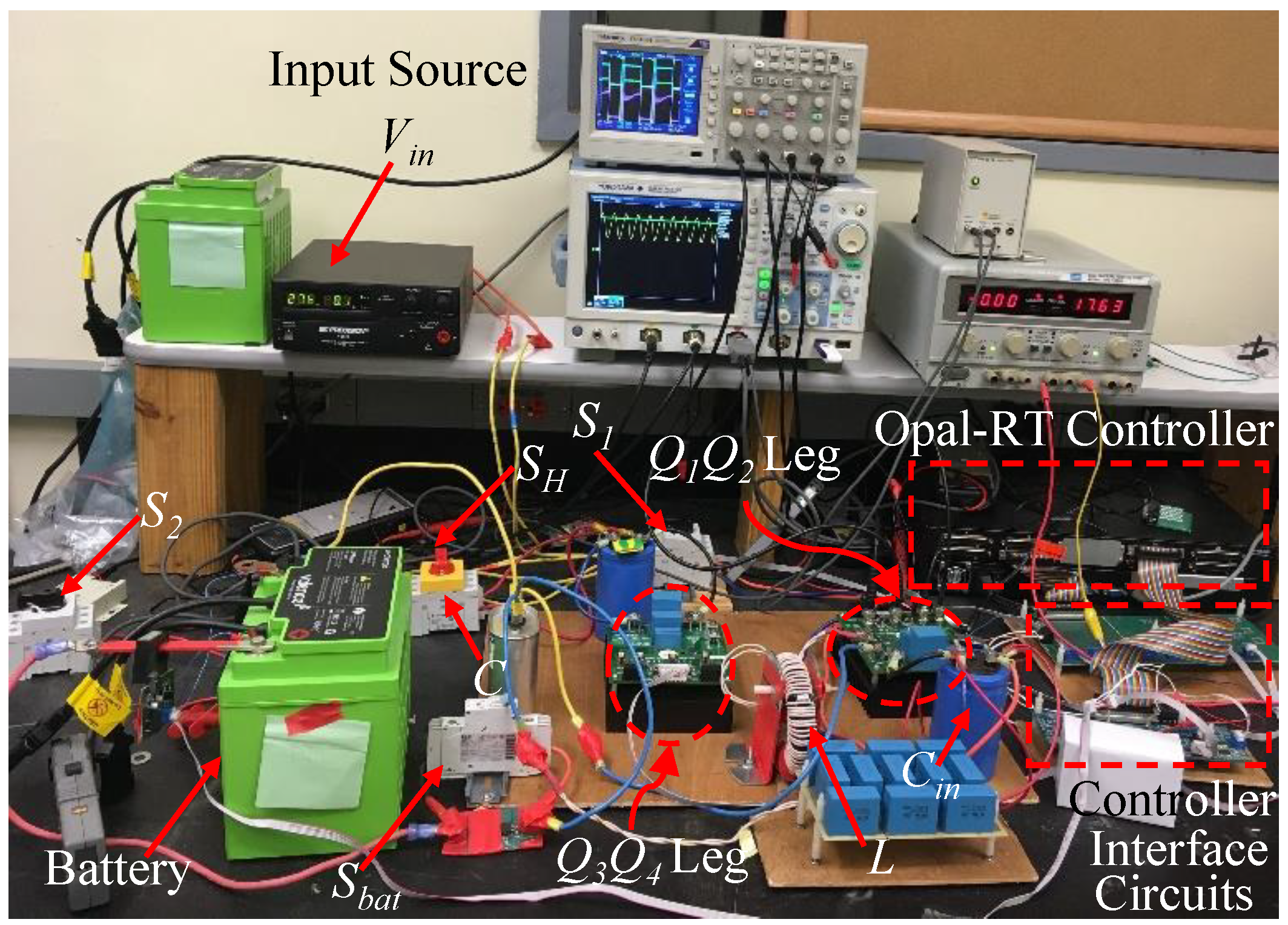
6.1. Experimental Setup
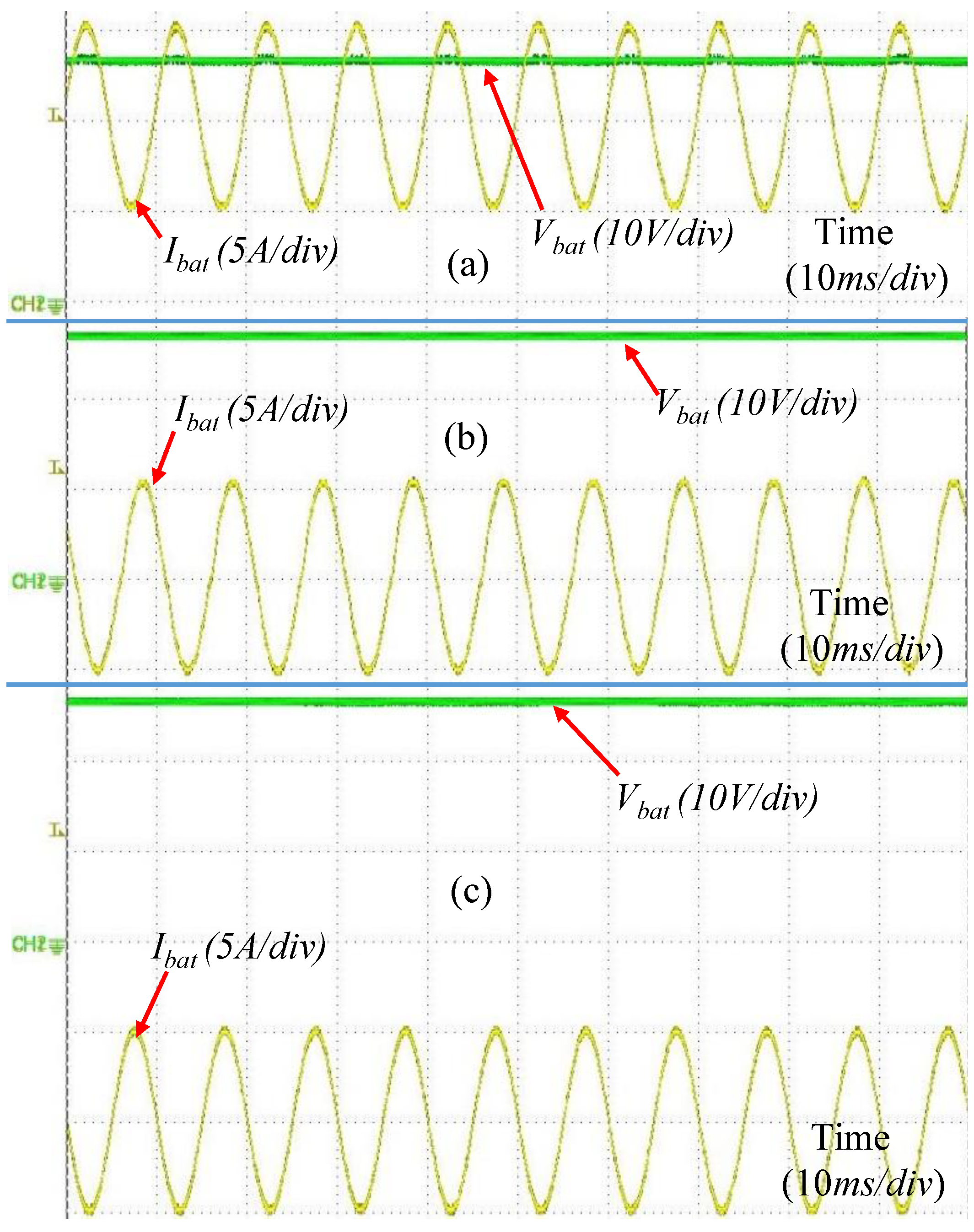
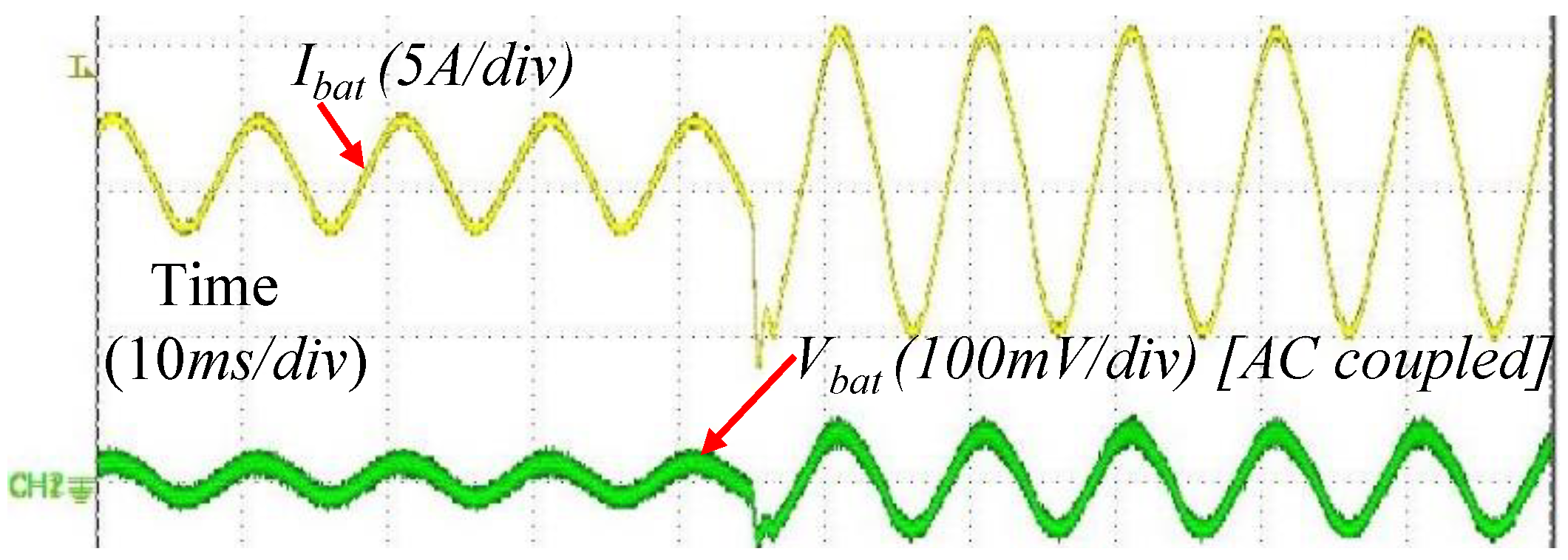
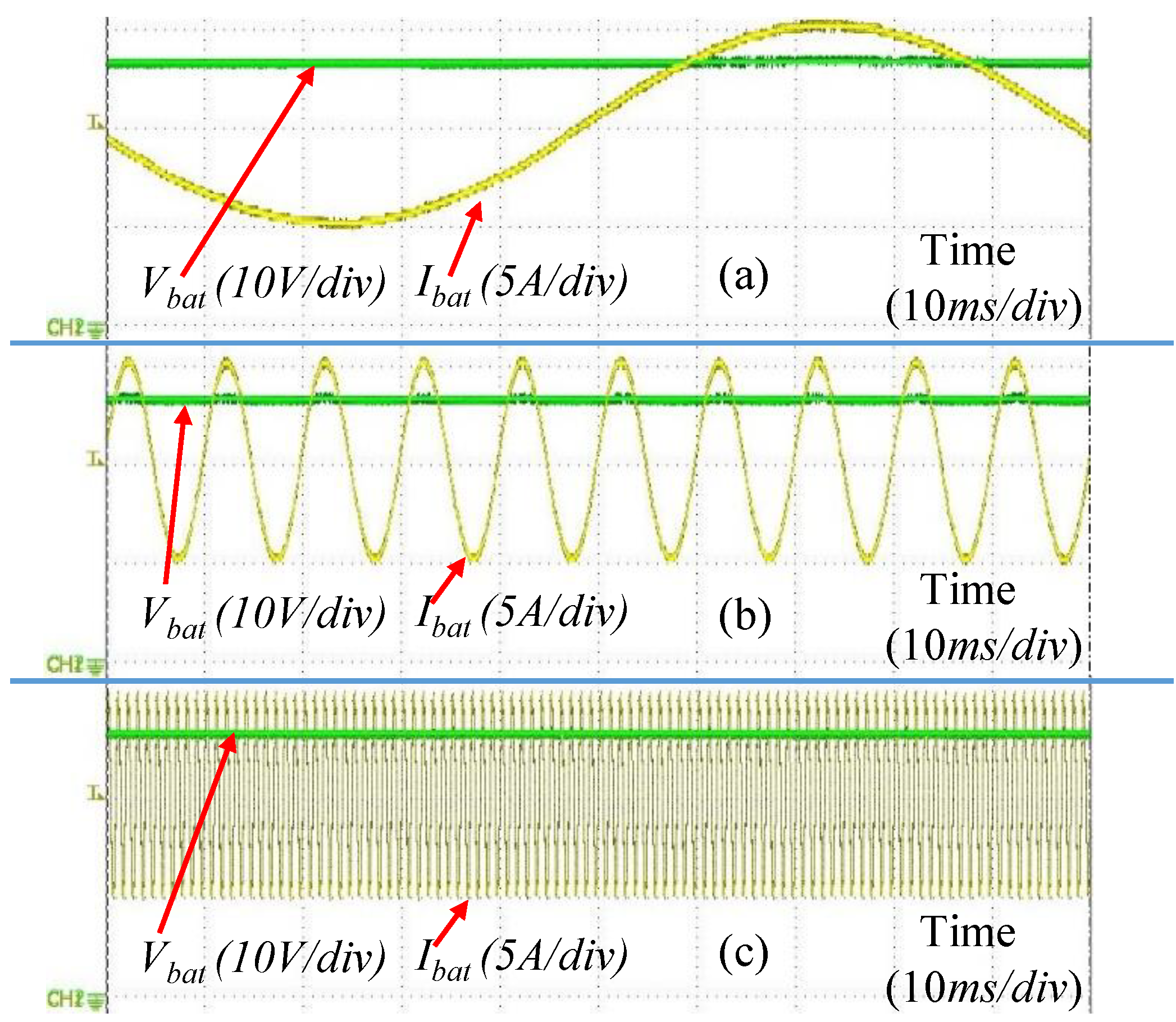
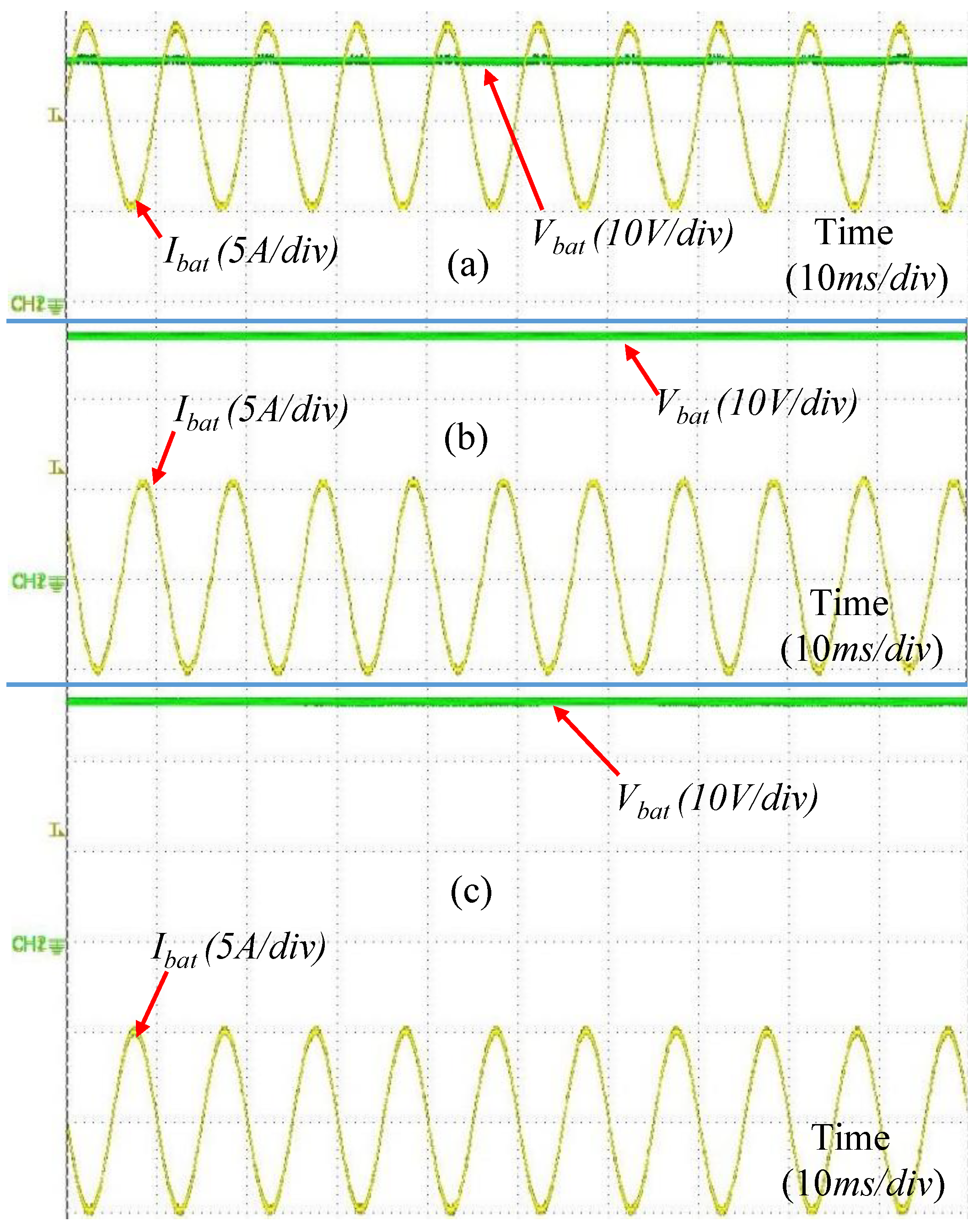
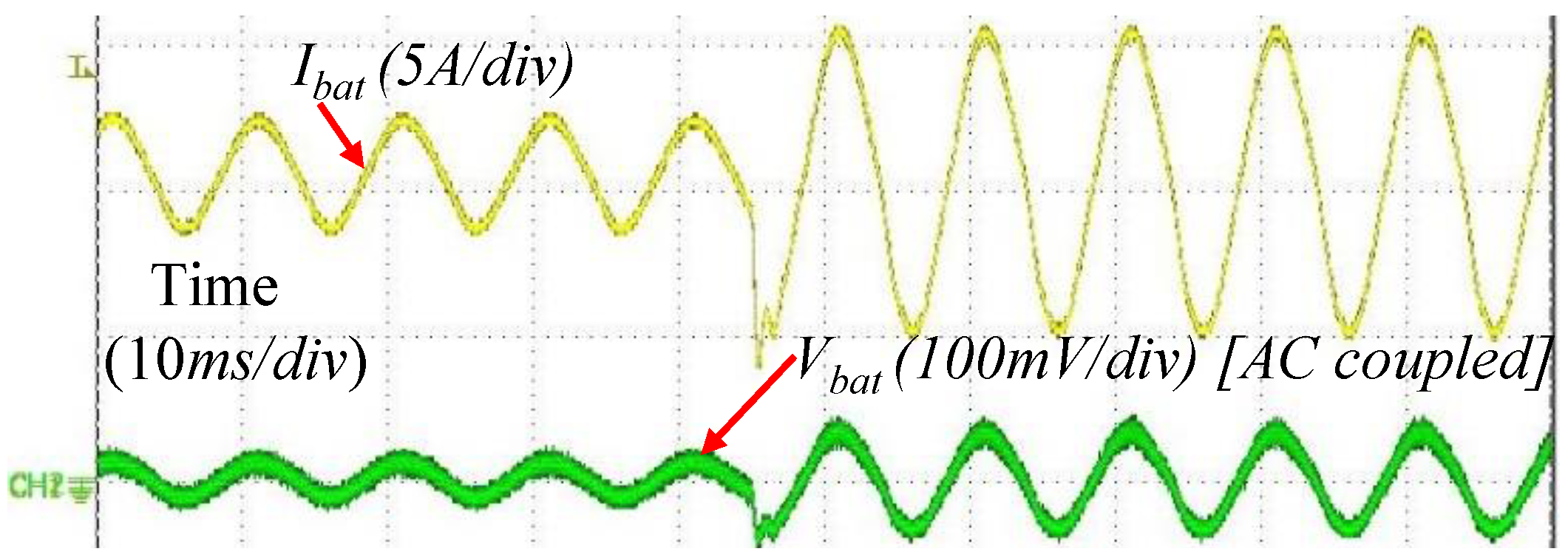
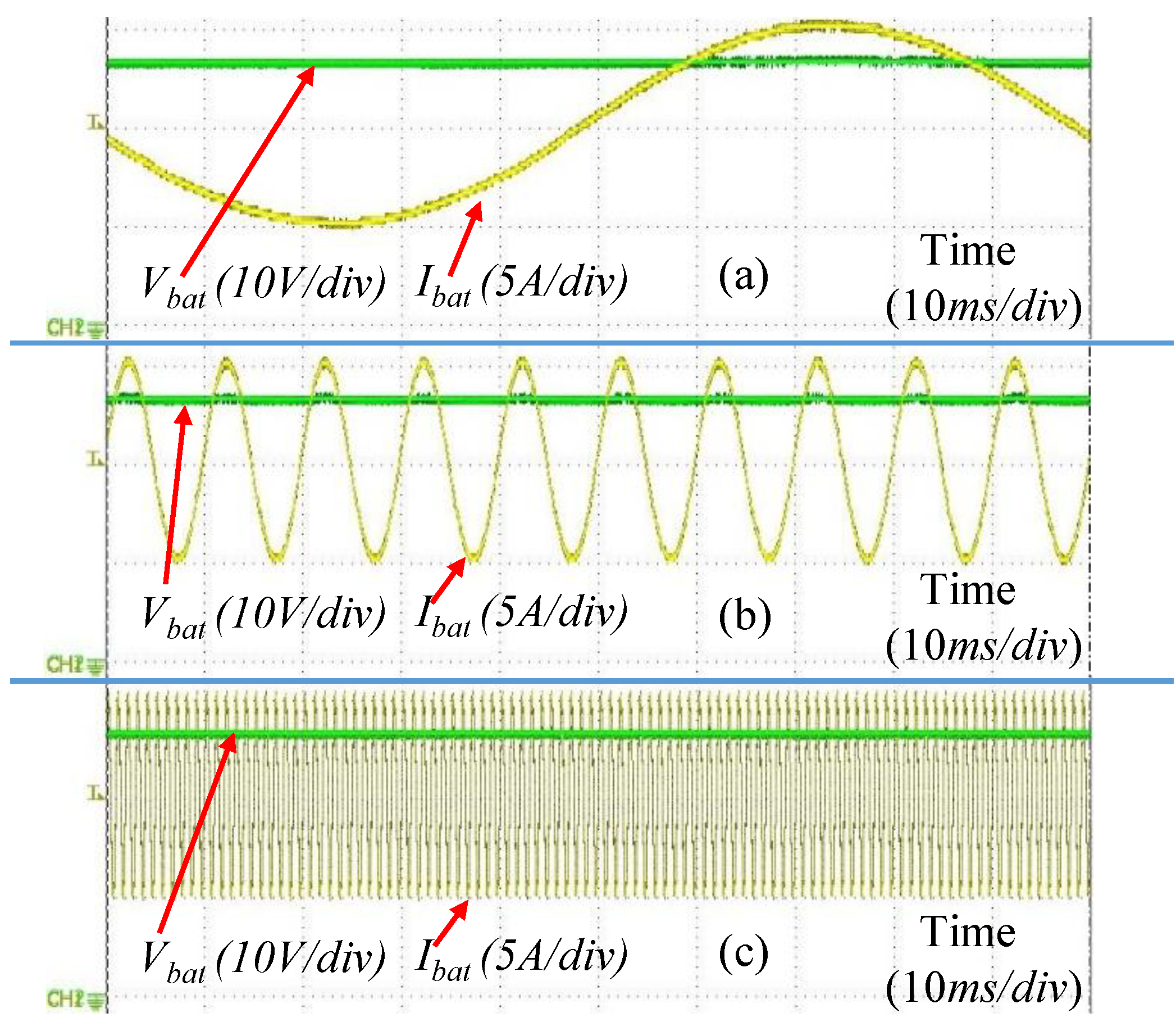
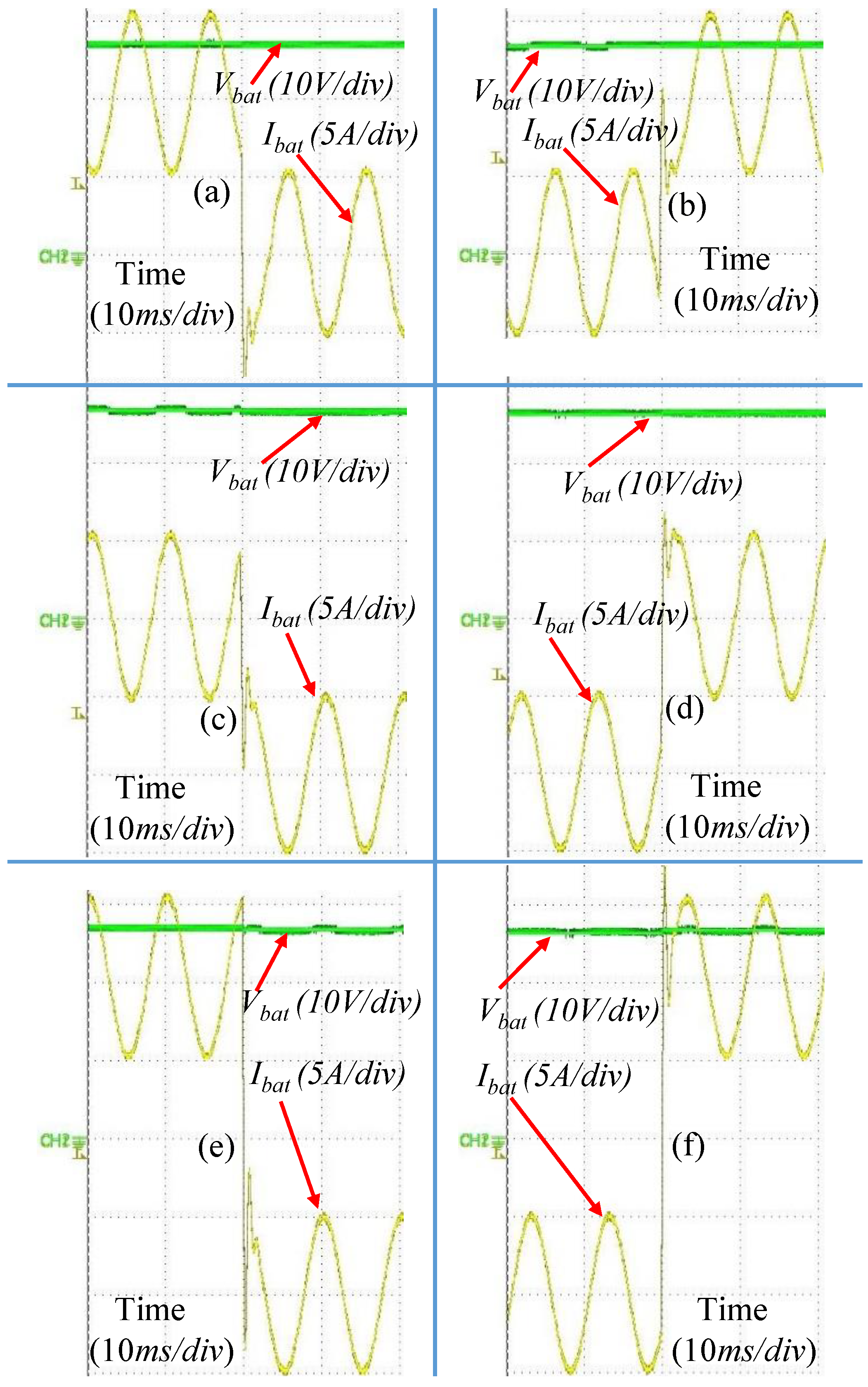
6.2. Waveforms and Analysis
7. Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shang, Y.; Liu, K.; Cui, N.; Zhang, Q.; Zhang, C. A Sine-Wave Heating Circuit for Automotive Battery Self-Heating at Subzero Temperatures. IEEE Trans. Ind. Inform. 2020, 16, 3355–3365. [Google Scholar] [CrossRef]
- Din, E.; Schaef, C.; Moffat, K.; Stauth, J.T. A Scalable Active Battery Management System With Embedded Real-Time Electrochemical Impedance Spectroscopy. IEEE Trans. Power Electron. 2017, 32, 5688–5698. [Google Scholar] [CrossRef]
- Varnosfaderani, M.A.; Strickland, D. A Comparison of Online Electrochemical Spectroscopy Impedance Estimation of Batteries. IEEE Access 2018, 6, 23668–23677. [Google Scholar] [CrossRef]
- Lee, Y.D.; Park, S.Y. Electrochemical State-Based Sinusoidal Ripple Current Charging Control. IEEE Trans. Power Electron. 2015, 30, 4232–4243. [Google Scholar] [CrossRef]
- Lasia, A. Electrochemical Impedance Spectroscopy and Its Applications; Springer: New York, NY, USA, 2014. [Google Scholar]
- Orazem, M.E.; Tribollet, B. Electrochemical Impedance Spectroscopy; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 48. [Google Scholar]
- Lee, Y.D.; Park, S.Y.; Han, S.B. Online Embedded Impedance Measurement Using High-Power Battery Charger. IEEE Trans. Ind. Appl. 2015, 51, 498–508. [Google Scholar] [CrossRef]
- Chen, J.; Lee, Y.; Park, S. Adaptive PI gain control to realize sinusoidal ripple current charging. In Proceedings of the 2015 9th International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia), Seoul, Korea, 1–5 June 2015; pp. 2582–2589. [Google Scholar] [CrossRef]
- Islam, S.M.R.; Park, S. Precise Online Electrochemical Impedance Spectroscopy Strategies for Li-Ion Batteries. IEEE Trans. Ind. Appl. 2020, 56, 1661–1669. [Google Scholar] [CrossRef]
- Qahouq, J.A.A.; Xia, Z. Single-Perturbation-Cycle Online Battery Impedance Spectrum Measurement Method With Closed-Loop Control of Power Converter. IEEE Trans. Ind. Electron. 2017, 64, 7019–7029. [Google Scholar] [CrossRef]
- Hajisadeghian, H.; Motie Birjandi, A.A.; Nahavandi, R. Sliding Mode Controller (SMC) For Sinusoidal Ripple Current (SRC) Charge of Li-ion Battery. In Proceedings of the 2019 10th International Power Electronics, Drive Systems and Technologies Conference (PEDSTC), Shiraz, Iran, 12–14 February 2019; pp. 600–605. [Google Scholar] [CrossRef]
- Sadeghi, E.; Zand, M.H.; Hamzeh, M.; Saif, M.; Alavi, S.M.M. Controllable Electrochemical Impedance Spectroscopy: From Circuit Design to Control and Data Analysis. IEEE Trans. Power Electron. 2020, 35, 9933–9942. [Google Scholar] [CrossRef]
- Bayati, M.; Abedi, M.; Gharehpetian, G.B.; Farahmandrad, M. Sinusoidal-Ripple Current Control in Battery Charger of Electric Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 7201–7210. [Google Scholar] [CrossRef]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 29. [Google Scholar]
- Li, J. Design and Control Optimisation of a Novel Bypass-embedded Multilevel Multicell Inverter for Hybrid Electric Vehicle Drives. In Proceedings of the 2020 IEEE 11th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Dubrovnik, Croatia, 28 September–1 October 2020; pp. 382–385. [Google Scholar] [CrossRef]
- Chen, L.; Wu, S.; Shieh, D.; Chen, T. Sinusoidal-Ripple-Current Charging Strategy and Optimal Charging Frequency Study for Li-Ion Batteries. IEEE Trans. Ind. Electron. 2013, 60, 88–97. [Google Scholar] [CrossRef]
- Koch, R.; Kuhn, R.; Zilberman, I.; Jossen, A. Electrochemical impedance spectroscopy for online battery monitoring—Power electronics control. In Proceedings of the 2014 16th European Conference on Power Electronics and Applications, Lappeenranta, Finland, 26–28 August 2014; pp. 1–10. [Google Scholar] [CrossRef]
- Instruments, T. Basic Calculation of a Buck Converter’s Power Stage; Application Report-SLVA477B, Rev; Richtek Technology Corporation: Zhubei City, Taiwan, 2015. [Google Scholar]
- Islam, S.; Park, S.Y.; Balasingam, B. Unification of Internal Resistance Estimation Methods for Li-Ion Batteries Using Hysteresis-Free Equivalent Circuit Models. Batteries 2020, 6, 32. [Google Scholar] [CrossRef]
- Lithium Werks. Valence U1-12XP Batteries. Available online: https://www.lithionbattery.com/products/modules/u-charge-xp/ (accessed on 13 July 2021).
- Koseoglou, M.; Tsioumas, E.; Papagiannis, D.; Jabbour, N.; Mademlis, C. A Novel On-Board Electrochemical Impedance Spectroscopy System for Real-Time Battery Impedance Estimation. IEEE Trans. Power Electron. 2021, 36, 10776–10787. [Google Scholar] [CrossRef]
- Tang, C.Y.; Chen, P.T.; Jheng, J.H. Bidirectional Power Flow Control Integrated With Pulse and Sinusoidal-Ripple-Current Charging Strategies for Three-Phase Grid-Tied Converters. IEEE Access 2021, 9, 42151–42160. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Switches | ||||
|---|---|---|---|---|
| State | 00 | 10 | 01 | 11 |
| Mode | 2 | 1 | 3 | 1, 2, 3 |
| L | C | ||||
|---|---|---|---|---|---|
| Calculated | 27.6 V | 5.5 | 1800 F | 276 H | 41 F |
| Selected | 27.6 V | 4.5 | 2200 F | 198 H | 24 F |
| 2.3 kHz | 2.5 kHz | 100 kHz | 18.96 dB | 0 dB | 1 Hz | 0.11 | 0.7 |
| Condition | Sync-Buck | H-Bridge | ||||
|---|---|---|---|---|---|---|
| Steady State | Mode 1 | Mode 2 | Mode 3 | Mode 1 | Mode 2 | Mode 3 |
| ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| 0, 2, 3, & 5 A AC peak | ||||||
| 0, 0.1, 10, 50, 100, 300, 500, 1k, 1.5k, & 2k Hz AC | ||||||
| Dynamic Response | Mode change: 1-2, 2-1, 2-3, 3-2, 1-3, & 3-1. | |||||
| Maximum mode transition time: 2 mS | ||||||
| Maximum overshoot current for mode change: 2.5 A | ||||||
| Magnitude change of AC current: | ||||||
| ✓transient response for 0-5 A, 5-0 A, 2-5 A, & 5-2 A | ||||||
| Frequency change of AC current: | ||||||
| ✓frequency transition for 0–50 Hz, 50–100 Hz, 100–50 Hz, & 0–2 kHz | ||||||
| Reference | Year | Power Quadrant | DC Current | AC Waveform | Topology | Control | Notes |
|---|---|---|---|---|---|---|---|
| [10] | 2017 | 1 | - | 0.1–1.9 kHz | DC/DC | discharge, | voltage |
| multisine | boost/buck | feedback | control | ||||
| [9] | 2020 | 1 | + | 0.1 Hz–5 kHz | DC/DC | charge | feedback |
| [21] | 2021 | 1 | + | 20 mHz–2 kHz | DC/DC, | charge | feedback |
| [22] | 2021 | 2 | ± | <60 Hz | AC/DC/DC | charge/discharge | distort if |
| sine | grid-tied | feedback | Hz | ||||
| This | 2021 | 2 | ±, | 0.1 Hz–2 kHz | DC/DC, | charge/discharge, | passive |
| work | 0 | sine | Sync-buck, | feedback, | component | ||
| H-bridge | feedforward | selection |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Islam, S.M.R.; Park, S.-Y. Versatile AC Current Control Technique for a Battery Using Power Converters. Batteries 2021, 7, 47. https://doi.org/10.3390/batteries7030047
Islam SMR, Park S-Y. Versatile AC Current Control Technique for a Battery Using Power Converters. Batteries. 2021; 7(3):47. https://doi.org/10.3390/batteries7030047
Chicago/Turabian StyleIslam, S. M. Rakiul, and Sung-Yeul Park. 2021. "Versatile AC Current Control Technique for a Battery Using Power Converters" Batteries 7, no. 3: 47. https://doi.org/10.3390/batteries7030047
APA StyleIslam, S. M. R., & Park, S.-Y. (2021). Versatile AC Current Control Technique for a Battery Using Power Converters. Batteries, 7(3), 47. https://doi.org/10.3390/batteries7030047