
Dynamic Battery Modeling for Electric Vehicle Applications

 , ,
, ,  ,
,  and
and
Abstract
1. Introduction
- The creation of Modelica-based cell-level battery models using the second-order ECM representation technique;
- The utilization of parameter lookup tables with dependence on SoC for four commercial Li-ion battery cells with different chemistry type;
- The integration of the battery model with electrical, mechanical, thermal. and control subsystems into an EV-level model that is exclusively designed with Modelica;
- The evaluation of battery performance under an EV simulation using the standardized FTP-75 driving cycle;
- The verification of the model results against a well-established MATLAB EV reference application.
2. Materials and Methods
2.1. Equivalent Circuit Model Background
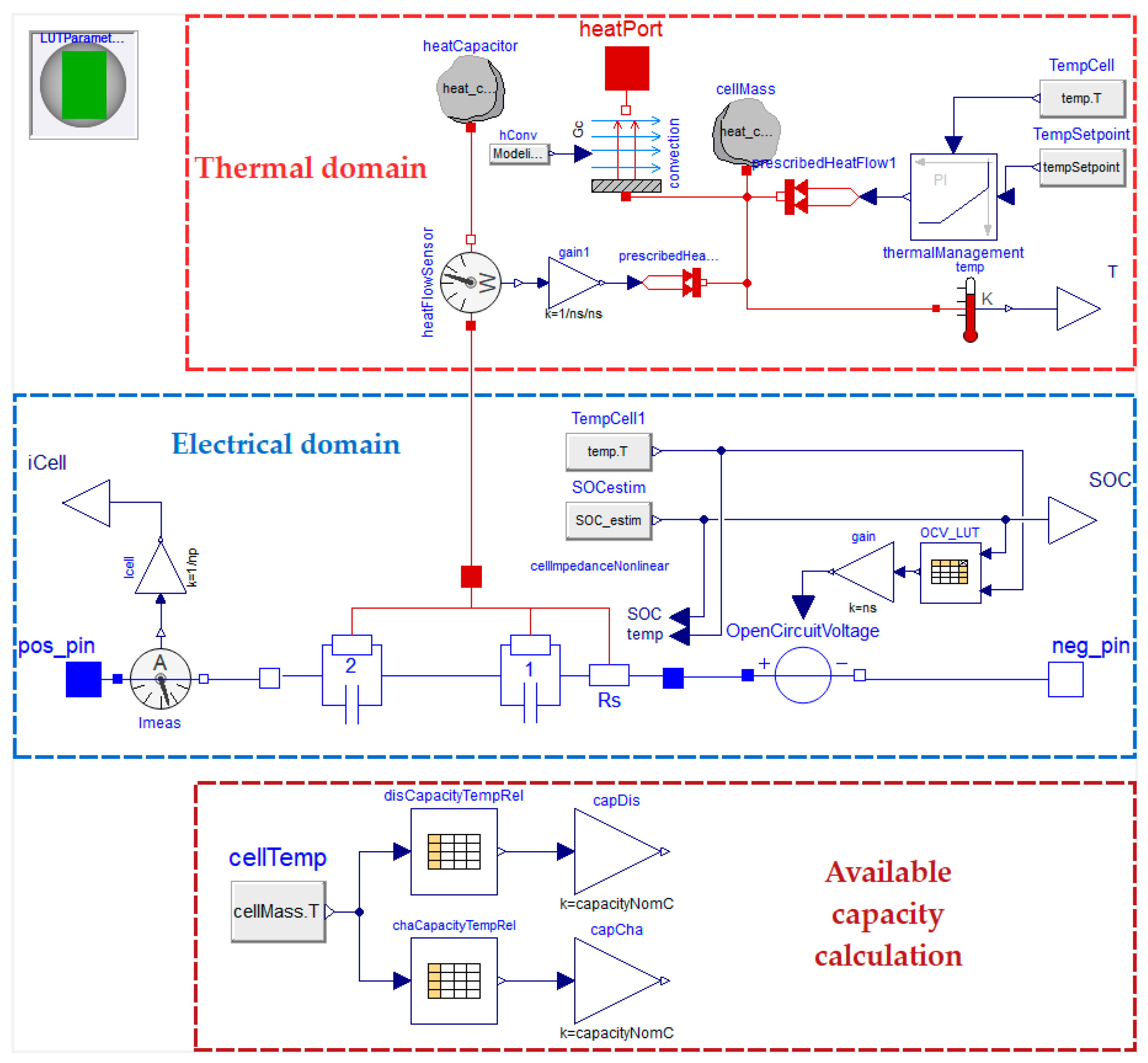
2.2. Battery Model Implementation with Modelica
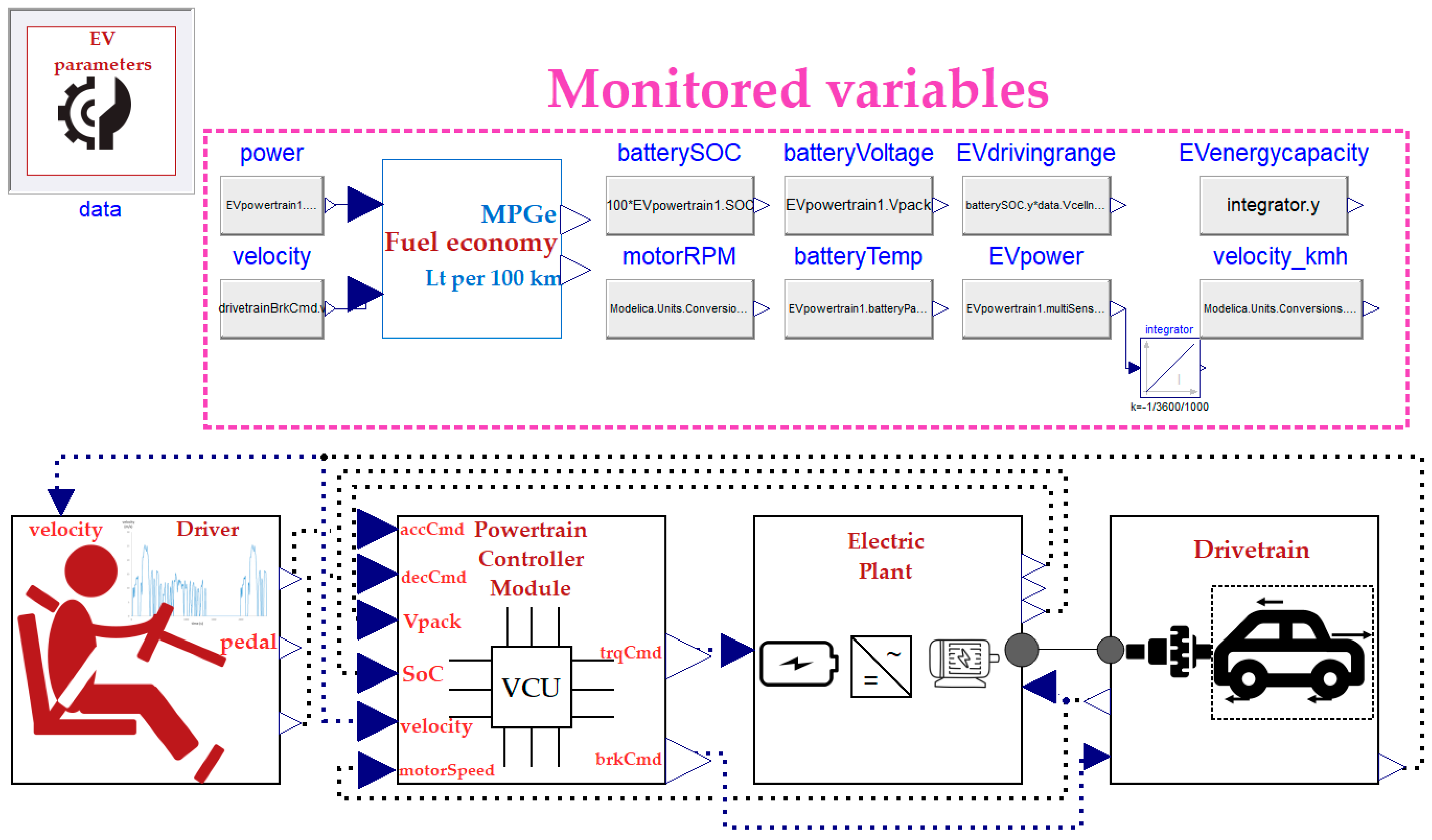
2.3. EV Model with Modelica
- The driver’s control actions to close the gap between the requested and actual vehicle velocity;
- The battery controllers that ensure operation within the allowed technical limits;
- The power recovery through regenerative braking;
- The EV powertrain, including physical models of the battery pack (array of cells connected in series and in parallel), the electric motor, the electric drive, and the mechanical drivetrain of the vehicle.
2.3.1. Driver Subsystem
2.3.2. Powertrain Control Module Subsystem
2.3.3. Electric Plant Subsystem
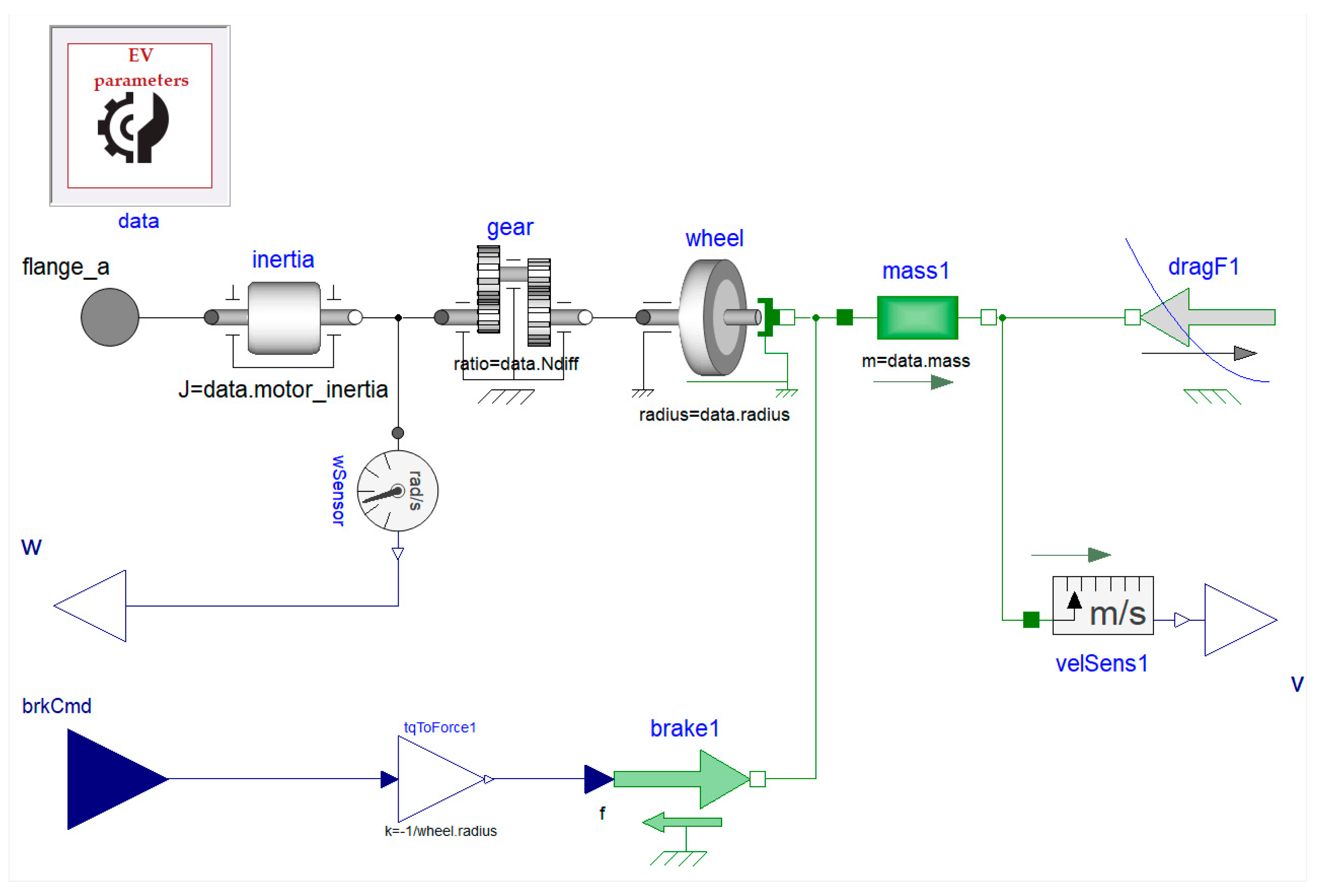
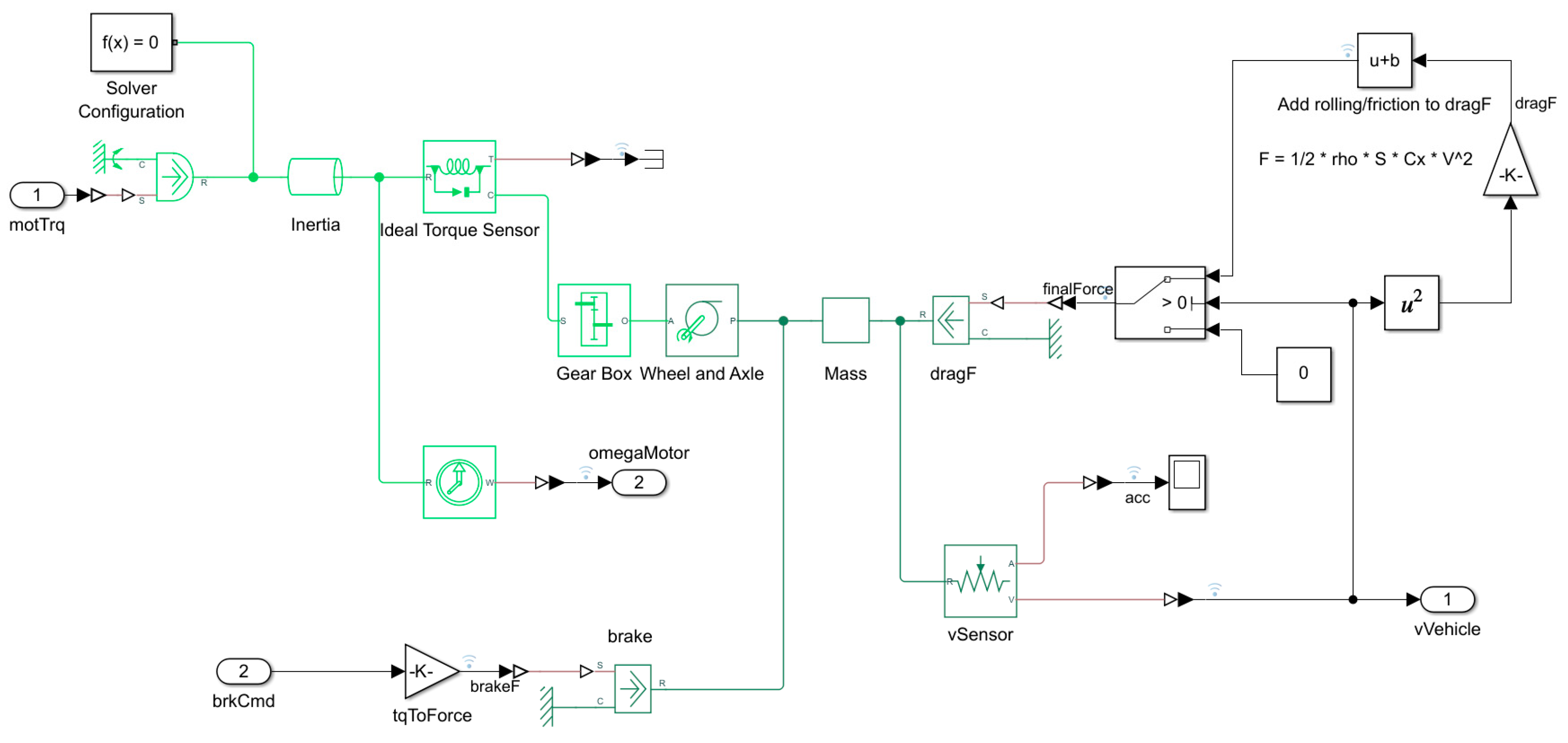
2.3.4. Drivetrain Subsystem
2.4. EV Model Modifications with MATLAB Simscape
3. Results
3.1. Model Verification Setup
- Overall EV technical parameters;
- User velocity profile;
- Battery specifications;
- Electric motor specifications.
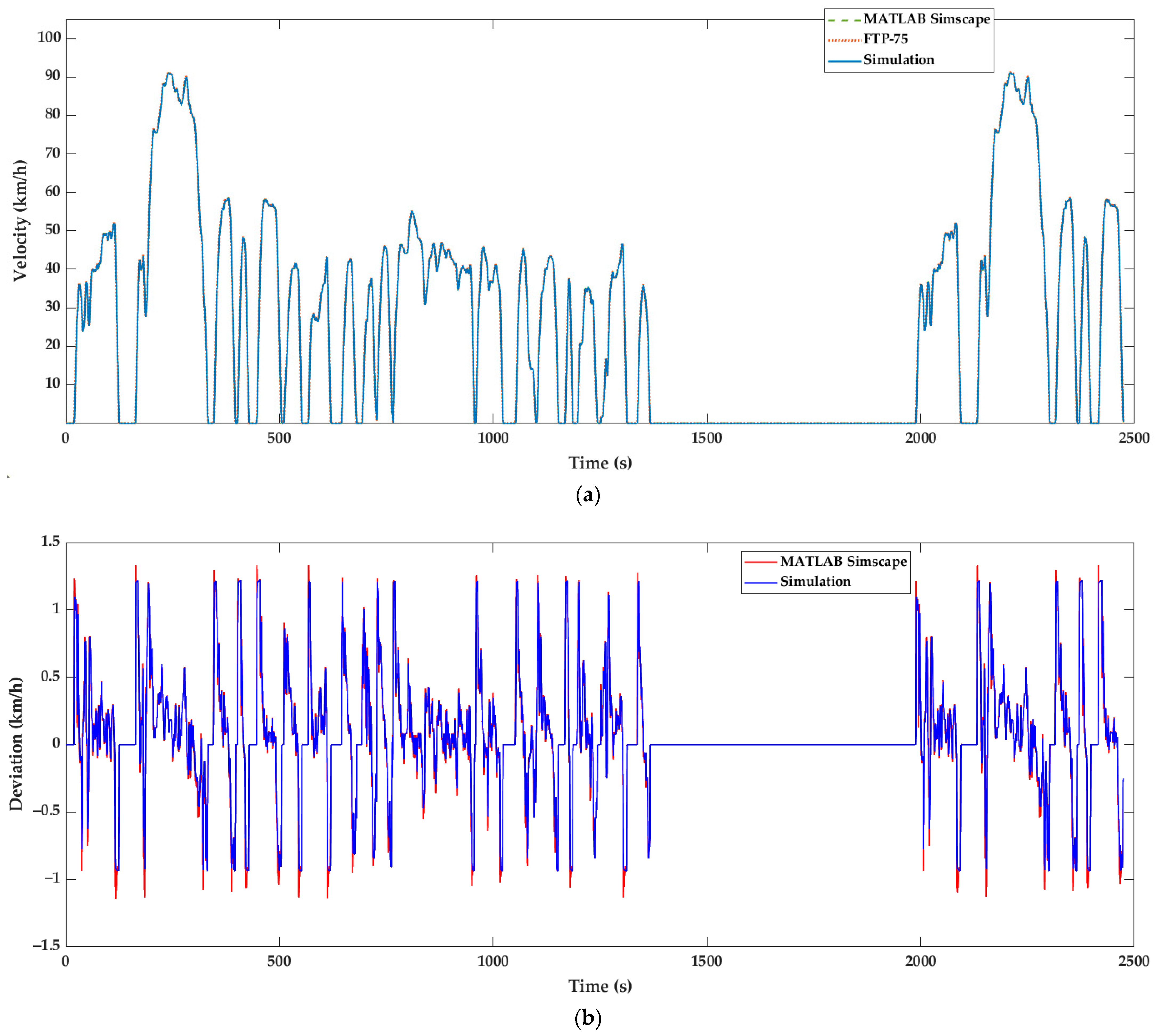
- The vehicle velocity against the requested velocity profile (driving cycle);
- The deviation between simulated and requested vehicle velocity;
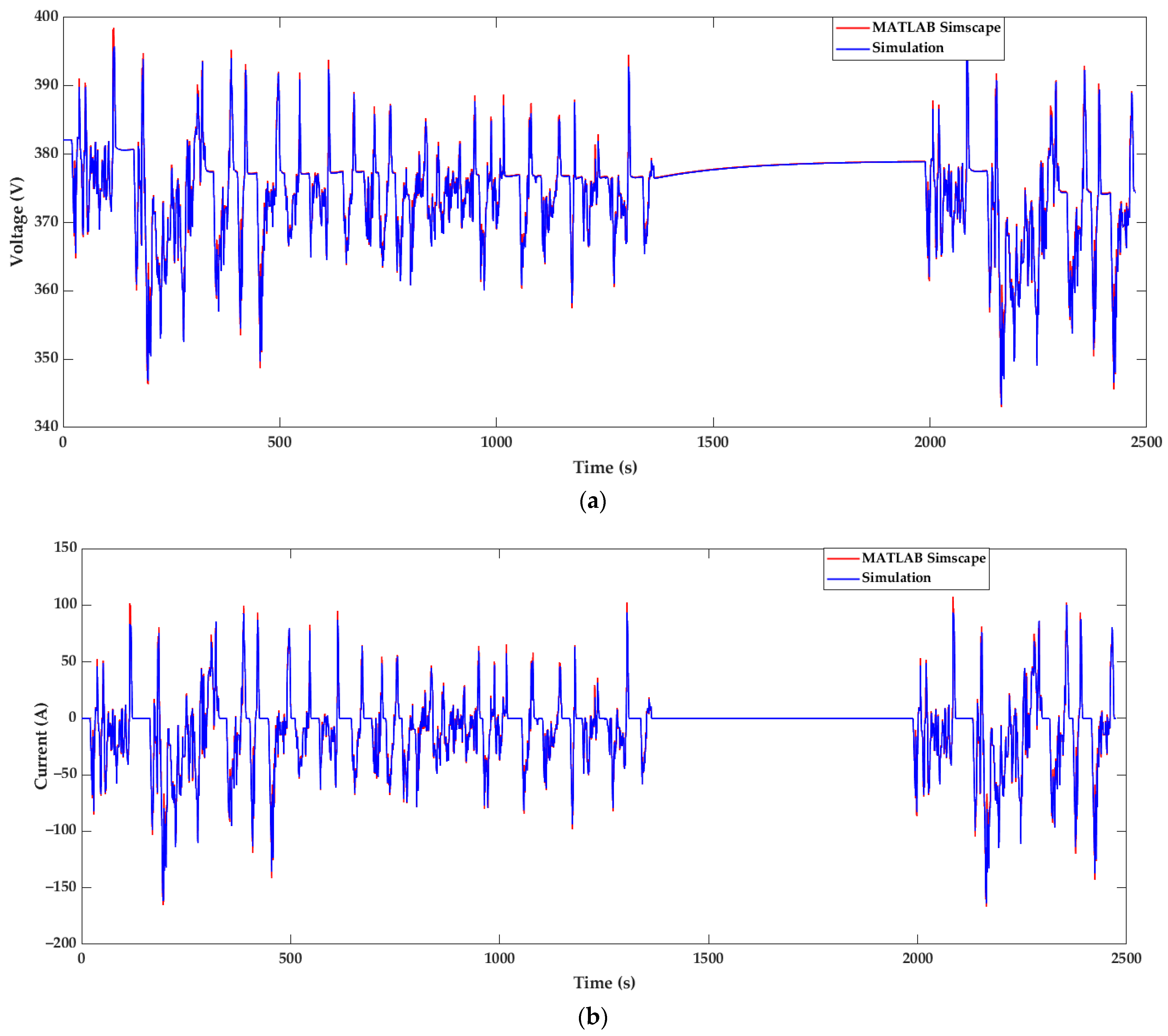
- The current supplied to/by the battery by/to the motor;
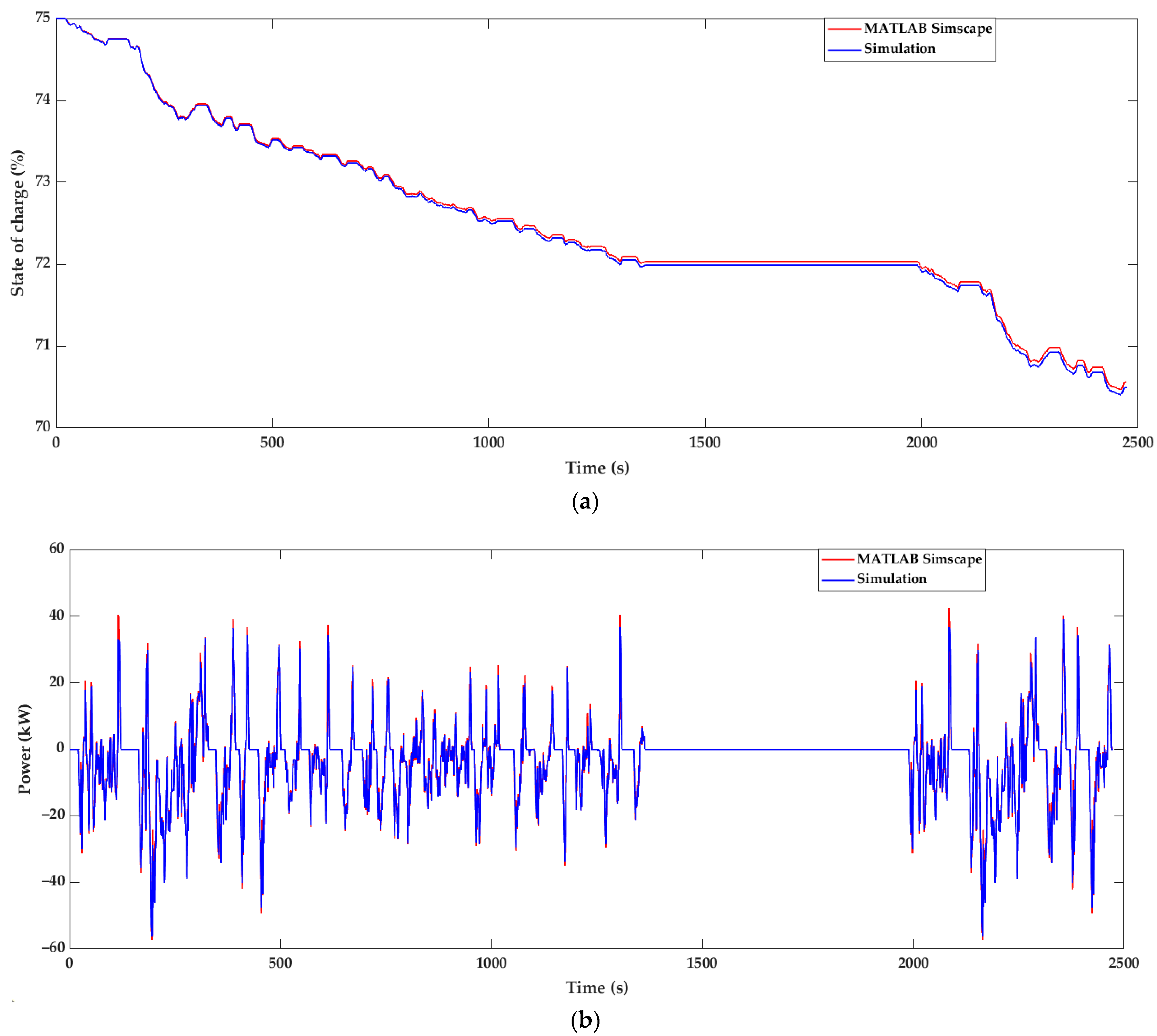
- The power supplied to/by the battery by/to the motor;
- The battery pack state of charge;
- The voltage at battery pack terminals;
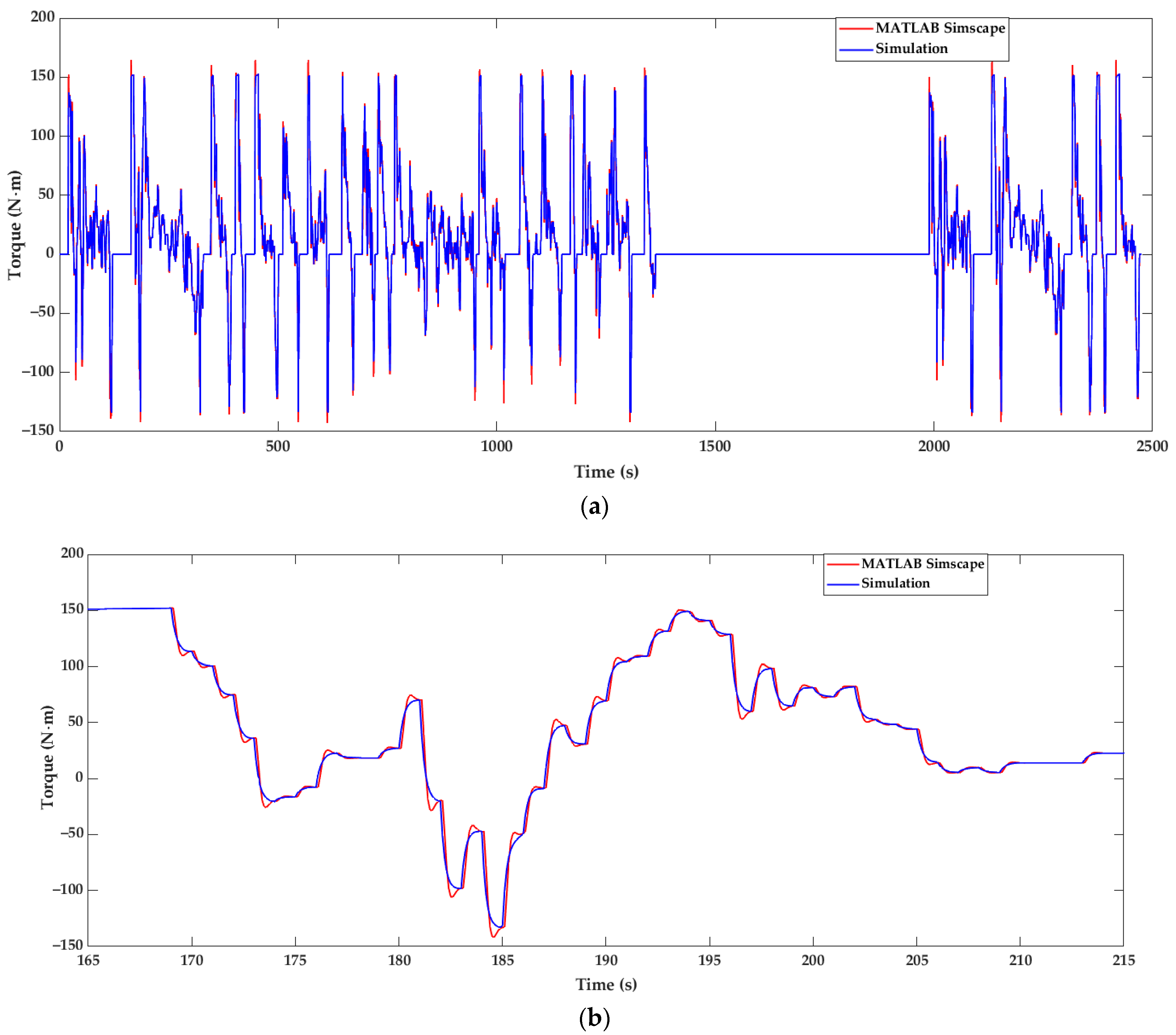
- The torque applied by the motor;
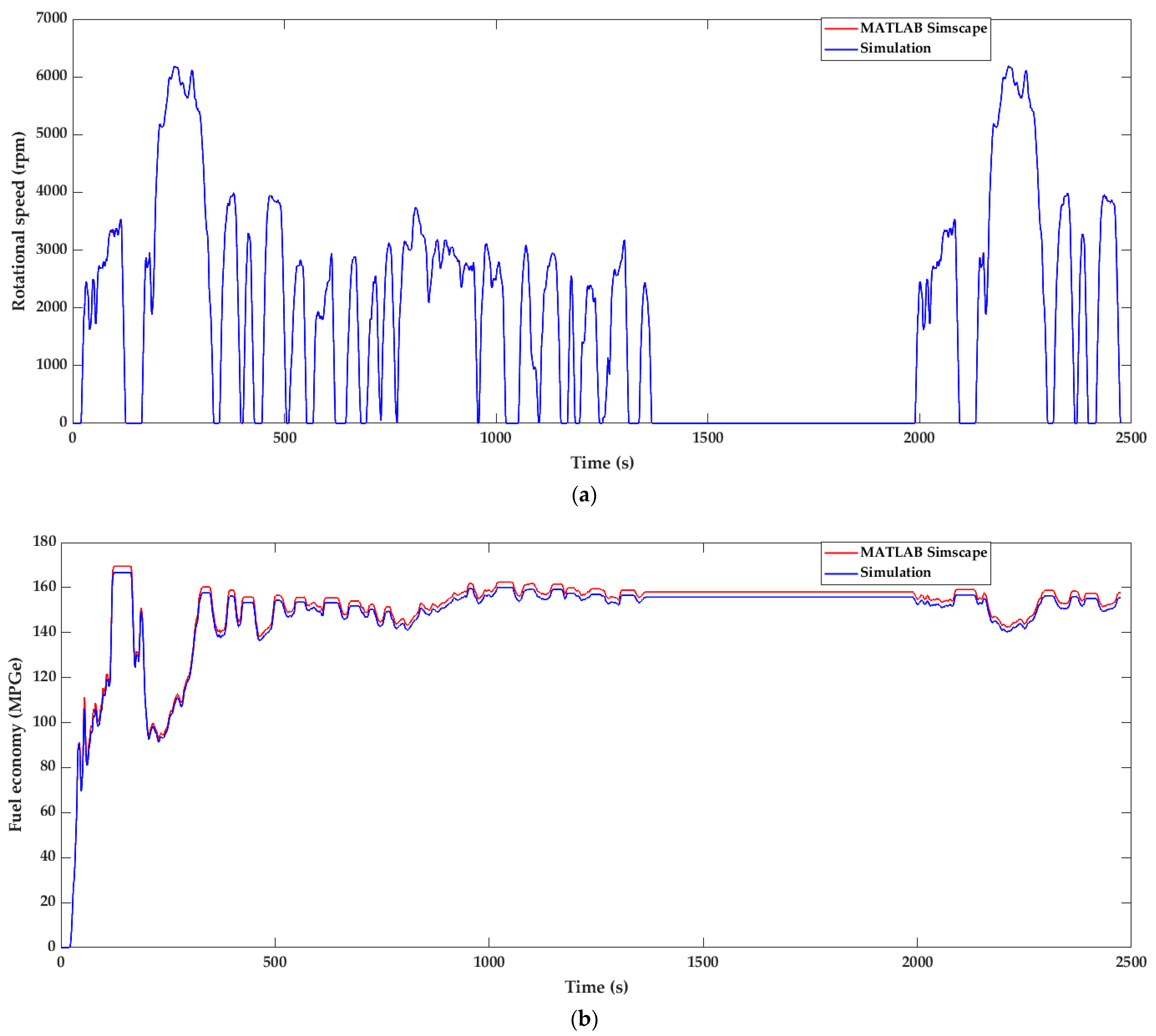
- The motor rotational speed;
- The fuel economy;
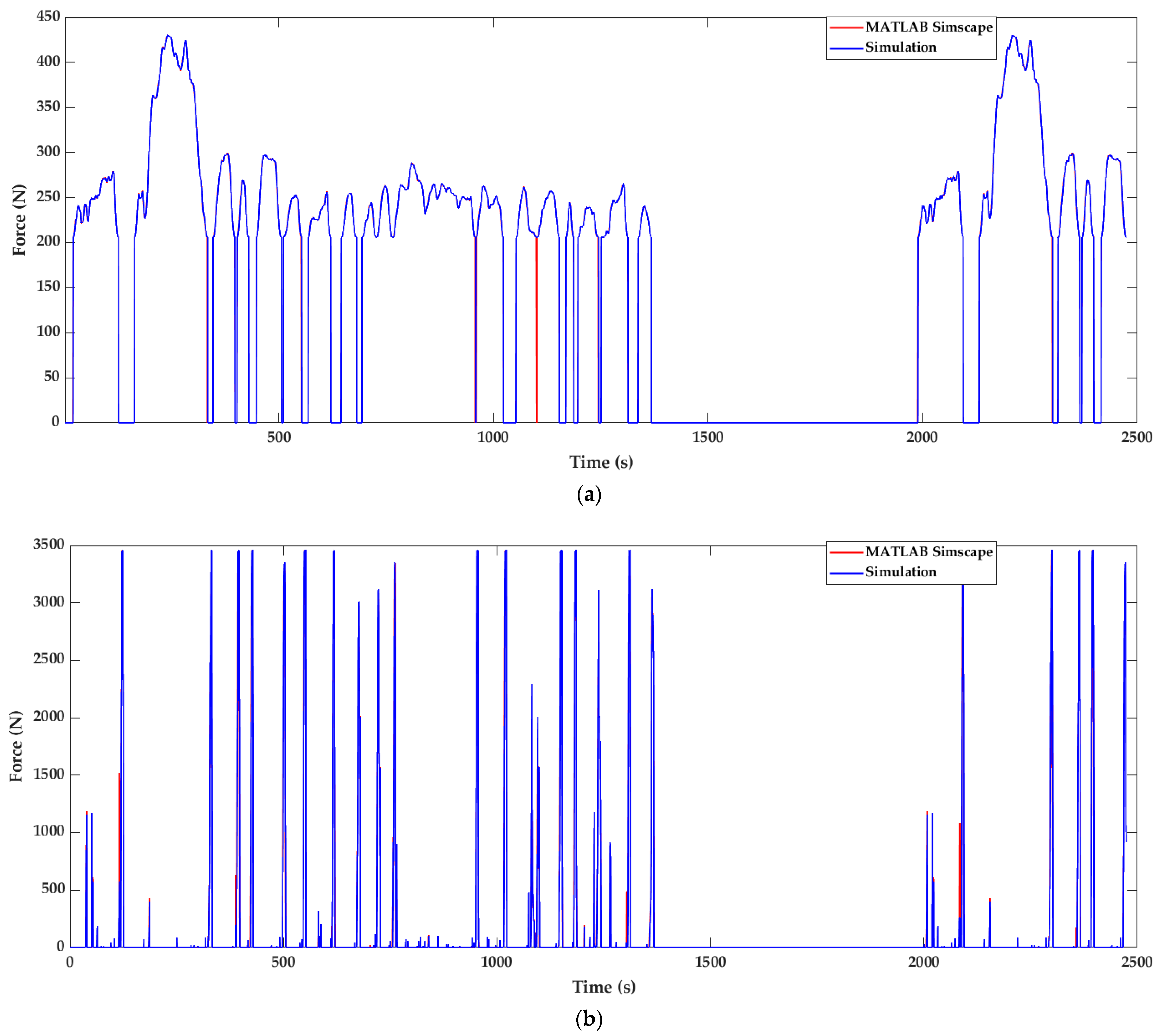
- The brake, drag, and rolling resistance forces applied to the vehicle body.
3.2. Model Verification Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qin, D.; Li, J.; Wang, T.; Zhang, D. Modeling and Simulating a Battery for an Electric Vehicle Based on Modelica. Automot. Innov. 2019, 2, 169–177. [Google Scholar] [CrossRef]
- Fritzson, P. Principles of Object-Oriented Modeling and Simulation with Modelica 3.3: A Cyber-Physical Approach, 2nd ed.; IEEE Press [u.a.]: Piscataway, NJ, USA, 2015; ISBN 978-1-118-85912-4. [Google Scholar]
- Doyle, M.; Newman, J.; Gozdz, A.S.; Schmutz, C.N.; Tarascon, J. Comparison of Modeling Predictions with Experimental Data from Plastic Lithium Ion Cells. J. Electrochem. Soc. 1996, 143, 1890–1903. [Google Scholar] [CrossRef]
- Tamilselvi, S.; Gunasundari, S.; Karuppiah, N.; Razak RK, A.; Madhusudan, S.; Nagarajan, V.M.; Sathish, T.; Shamim, M.Z.M.; Saleel, C.A.; Afzal, A. A Review on Battery Modelling Techniques. Sustainability 2021, 13, 10042. [Google Scholar] [CrossRef]
- Chen, M.; Rincon-Mora, G.A. Accurate Electrical Battery Model Capable of Predicting Runtime and I-V Performance. IEEE Trans. Energy Convers. 2006, 21, 504–511. [Google Scholar] [CrossRef]
- Huria, T.; Ceraolo, M.; Gazzarri, J.; Jackey, R. High Fidelity Electrical Model with Thermal Dependence for Characterization and Simulation of High Power Lithium Battery Cells. In Proceedings of the 2012 IEEE International Electric Vehicle Conference, Greenville, SC, USA, 4–8 March 2012; pp. 1–8. [Google Scholar]
- Bui, T.M.N.; Dinh, T.Q.; Marco, J.; Watts, C. Development and Real-Time Performance Evaluation of Energy Management Strategy for a Dynamic Positioning Hybrid Electric Marine Vessel. Electronics 2021, 10, 1280. [Google Scholar] [CrossRef]
- Milishchuk, R.; Bogodorova, T. Thevenin-Based Battery Model with Ageing Effects in Modelica. In Proceedings of the 2022 IEEE 21st Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 14 June 2022; pp. 243–248. [Google Scholar]
- Bairwa, B.; Supraja, B.; Pratiksha, C.; Sumanth, A. Modeling and Simulation of Electric Vehicle Powertrain for Dynamic Performance Evaluation. In Proceedings of the 2023 International Conference on Distributed Computing and Electrical Circuits and Electronics (ICDCECE), Ballar, India, 29 April 2023; pp. 1–7. [Google Scholar]
- Chandra, S.; Nair, A.C.; Yadav, A.K.; Singhal, S. An Integrated Approach for Modelling Electric Powertrain. In Proceedings of the 2023 5th Global Power, Energy and Communication Conference (GPECOM), Nevsehir, Turkiye, 14 June 2023; pp. 175–180. [Google Scholar]
- Meszaros, S.; Bashash, S. Optimal Electric Vehicle Braking Control for Maximum Energy Regeneration. In Proceedings of the 2023 American Control Conference (ACC), San Diego, CA, USA, 31 May 2023; pp. 2475–2480. [Google Scholar]
- Adegbohun, F.; Von Jouanne, A.; Phillips, B.; Agamloh, E.; Yokochi, A. High Performance Electric Vehicle Powertrain Modeling, Simulation and Validation. Energies 2021, 14, 1493. [Google Scholar] [CrossRef]
- Gerl, J.; Janczyk, L.; Krüger, I.; Modrow, N. A Modelica Based Lithium Ion Battery Model. In Proceedings of the 10th International Modelica Conference, Lun, Sweden, 10 March 2014; pp. 335–341. [Google Scholar]
- Rotas, R.; Iliadis, P.; Nikolopoulos, N.; Tomboulides, A.; Kosmatopoulos, E. Dynamic Simulation and Performance Enhancement Analysis of a Renewable Driven Trigeneration System. Energies 2022, 15, 3688. [Google Scholar] [CrossRef]
- Tran, M.-K.; DaCosta, A.; Mevawalla, A.; Panchal, S.; Fowler, M. Comparative Study of Equivalent Circuit Models Performance in Four Common Lithium-Ion Batteries: LFP, NMC, LMO, NCA. Batteries 2021, 7, 51. [Google Scholar] [CrossRef]
- EV Reference Application—MATLAB & Simulink. Available online: https://www.mathworks.com/help/autoblks/ug/electric-vehicle-reference-application.html (accessed on 24 January 2024).
- Modelica/ModelicaStandardLibrary. Available online: https://github.com/modelica/ModelicaStandardLibrary (accessed on 10 January 2024).
- Ceraolo, M. Max-Privato/EHPT. Available online: https://github.com/max-privato/EHPT (accessed on 24 January 2024).
- US EPA Offiice. EPA Federal Test Procedure (FTP). Available online: https://www.epa.gov/emission-standards-reference-guide/epa-federal-test-procedure-ftp (accessed on 24 January 2024).
- US EPA Offiice. Text Version of the Electric Vehicle Label. Available online: https://www.epa.gov/fueleconomy/text-version-electric-vehicle-label (accessed on 26 January 2024).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chemistry | Manufacturer | Cell Name | Nominal Capacity (mAh) | Nominal Voltage (V) | Voltage Range (V) |
|---|---|---|---|---|---|
| LMO | EFEST | IMR18650V1 | 2600 | 3.70 | 2.50–4.20 |
| LFP | K2 Energy Solutions, Inc. | LFP26650P | 2600 | 3.20 | 2.00–3.65 |
| NMC | Samsung SDI | INR18650-20S | 2000 | 3.60 | 2.50–4.20 |
| NCA | Panasonic | NCR18650B | 3200 | 3.60 | 2.50–4.20 |
| Overall EV Technical Parameters | |
| Vehicle mass (with 4 passengers) | 1500 kg |
| Longitudinal aerodynamic drag coefficient | 0.26 |
| Gear ratio | 7.94 |
| Wheel radius | 0.31 m |
| Rolling resistance coefficient | 0.014 |
| Cross-sectional vehicle area | 2.2 m2 |
| Maximum brake pressure | 5 MPa |
| Electric Motor Specifications | |
| Maximum power | 211 kW |
| Maximum torque | 450 N⋅m |
| Total rotational inertia | 1.5 kg⋅m2 |
| Battery Specifications | |
| Battery chemistry type | Lithium-ion NMC |
| Number of cells in series | 96 |
| Number of cells in parallel | 31 |
| Nominal cell capacity | 4.8 Ah |
| Nominal cell voltage | 3.6 V |
| Nominal battery pack energy capacity | 51.4 kWh |
| Maximum allowed discharge rate | 5C |
| Initial state of charge | 0.75 |
| Cell thermal mass | 1364 J/K |
| Minimum cell operating voltage | 2.5 V |
| Maximum cell operating voltage | 4.2 V |
| User Velocity Profile | |
| Driving cycle | FTP-75 |
| Quantity | MATLAB Reference Application Results | Simulation Results | Relative Difference |
|---|---|---|---|
| Maximum absolute velocity deviation | 1.33 km/h | 1.22 km/h | −8.2% |
| Battery positive peak power | 42.5 kW | 39.2 kW | −7.9% |
| Absolute battery negative peak power | 57.2 kW | 56.2 kW | −1.8% |
| Energy consumption | 2.35 kWh | 2.39 kWh | 1.4% |
| Maximum positive torque | 164.5 N⋅m | 152.8 N⋅m | −7.1% |
| Maximum negative torque | 142.9 N⋅m | 133.8 N⋅m | −6.4% |
| SoC reduction | 4.44% | 4.50% | 1.4% |
| Fuel economy | 157.72 MPGe | 155.45 MPGe | −2.7% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rotas, R.; Iliadis, P.; Nikolopoulos, N.; Rakopoulos, D.; Tomboulides, A. Dynamic Battery Modeling for Electric Vehicle Applications. Batteries 2024, 10, 188. https://doi.org/10.3390/batteries10060188
Rotas R, Iliadis P, Nikolopoulos N, Rakopoulos D, Tomboulides A. Dynamic Battery Modeling for Electric Vehicle Applications. Batteries. 2024; 10(6):188. https://doi.org/10.3390/batteries10060188
Chicago/Turabian StyleRotas, Renos, Petros Iliadis, Nikos Nikolopoulos, Dimitrios Rakopoulos, and Ananias Tomboulides. 2024. "Dynamic Battery Modeling for Electric Vehicle Applications" Batteries 10, no. 6: 188. https://doi.org/10.3390/batteries10060188
APA StyleRotas, R., Iliadis, P., Nikolopoulos, N., Rakopoulos, D., & Tomboulides, A. (2024). Dynamic Battery Modeling for Electric Vehicle Applications. Batteries, 10(6), 188. https://doi.org/10.3390/batteries10060188