
Equivalent Noise Analysis and Modeling for a Magnetic Tunnel Junction Magnetometer with In Situ Magnetic Feedback


Abstract
:1. Introduction
2. Design of MTJ Magnetometer with In Situ Magnetic Feedback
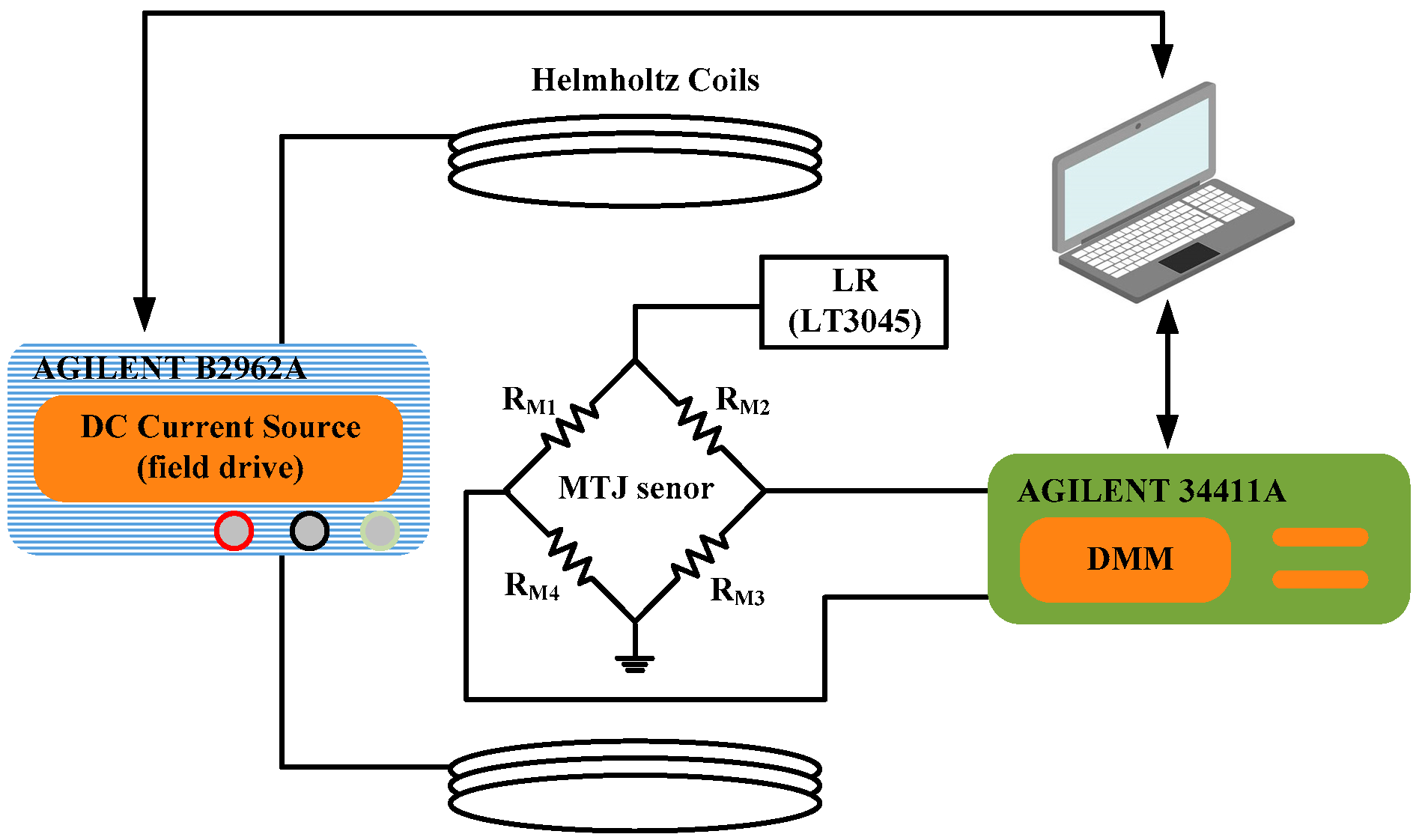
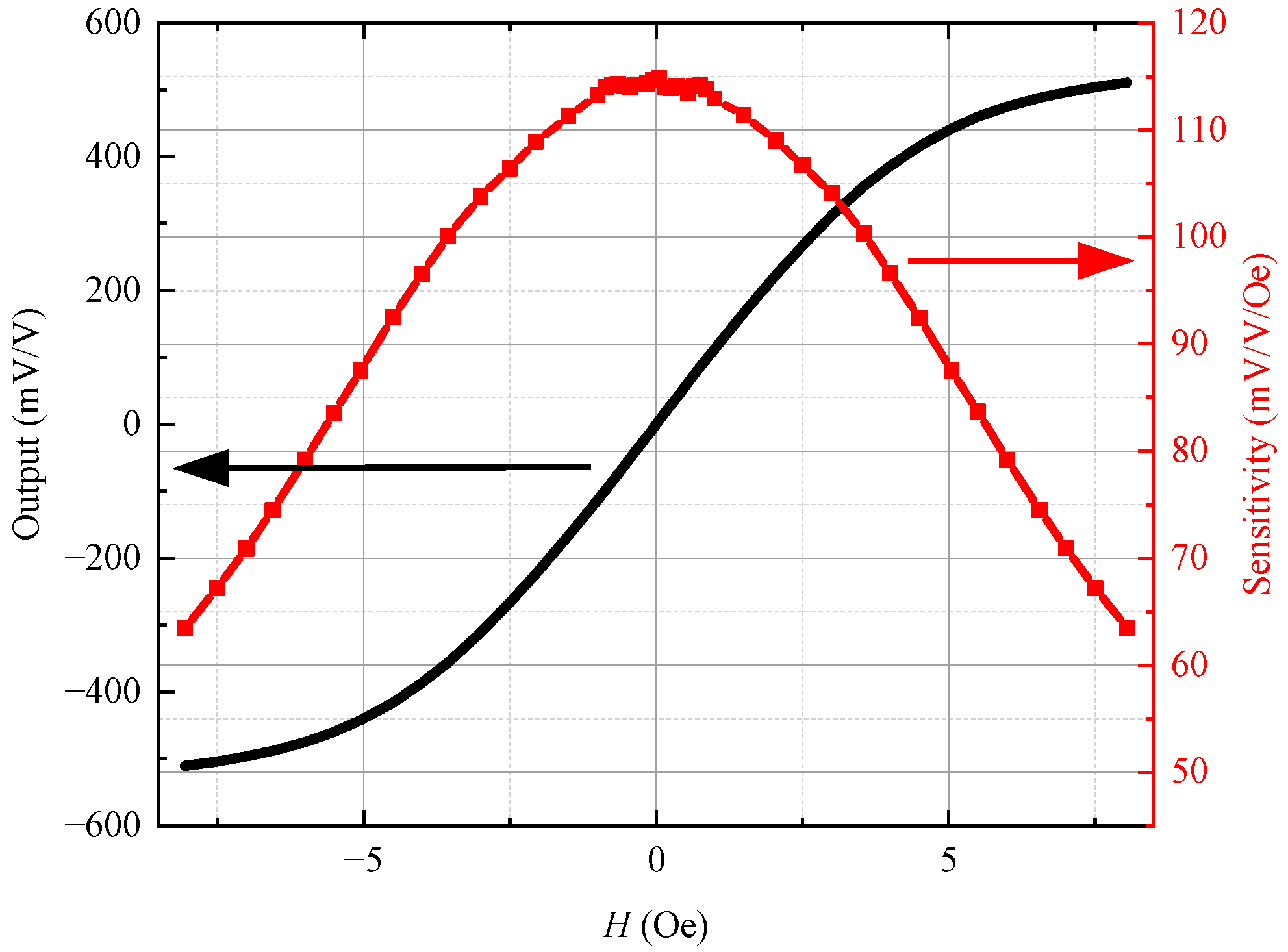
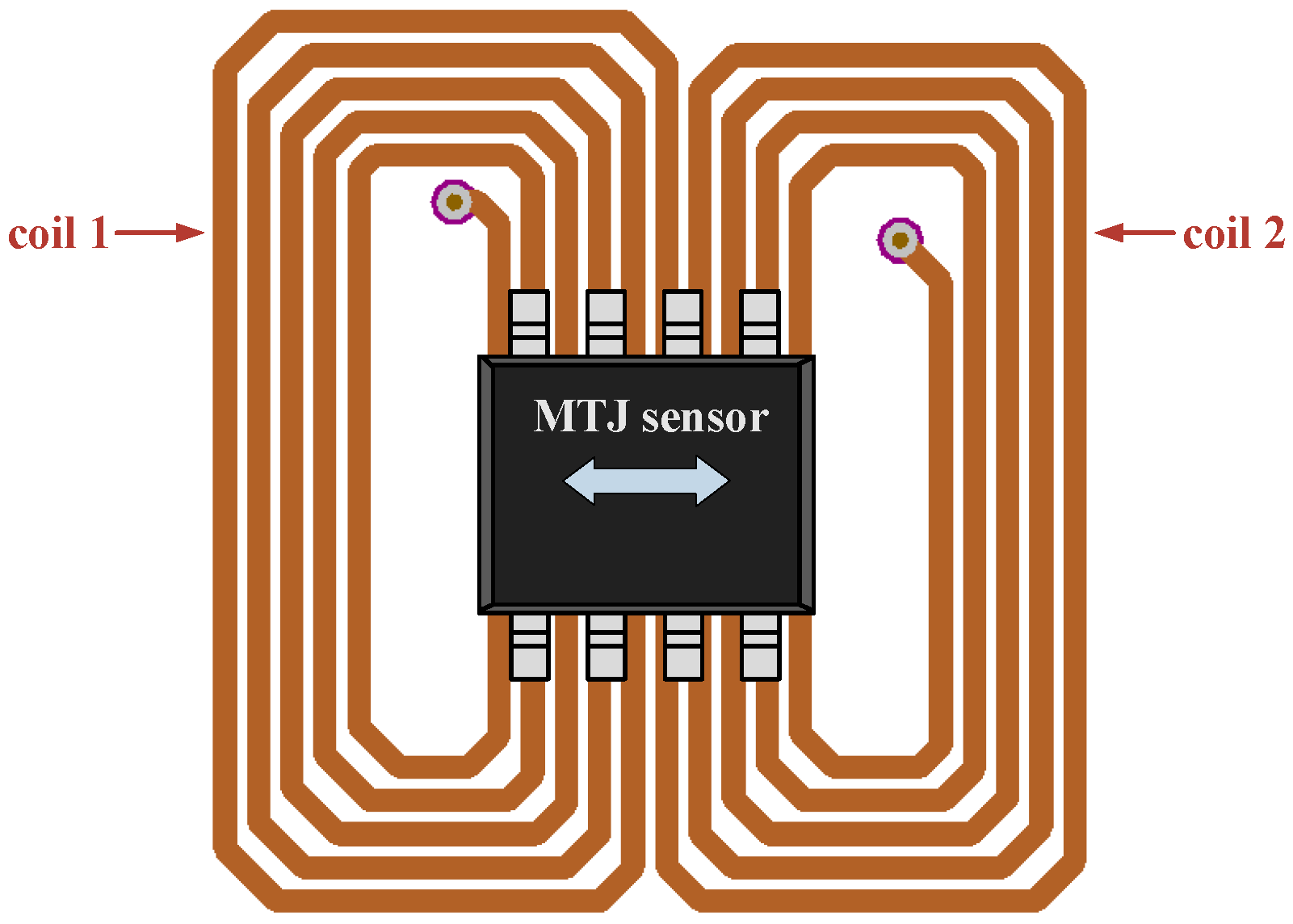
2.1. Magnetic Field Sensing Element
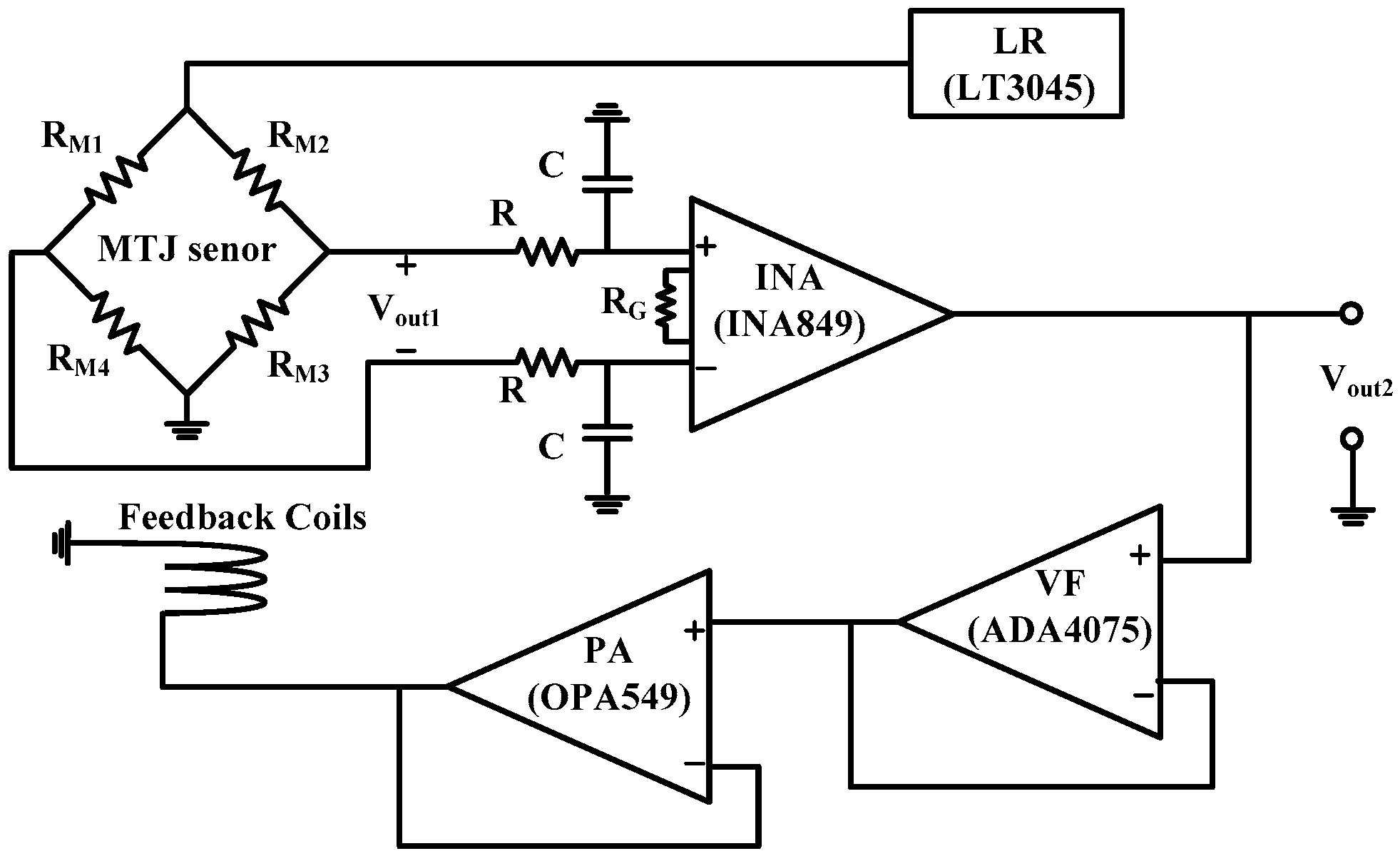
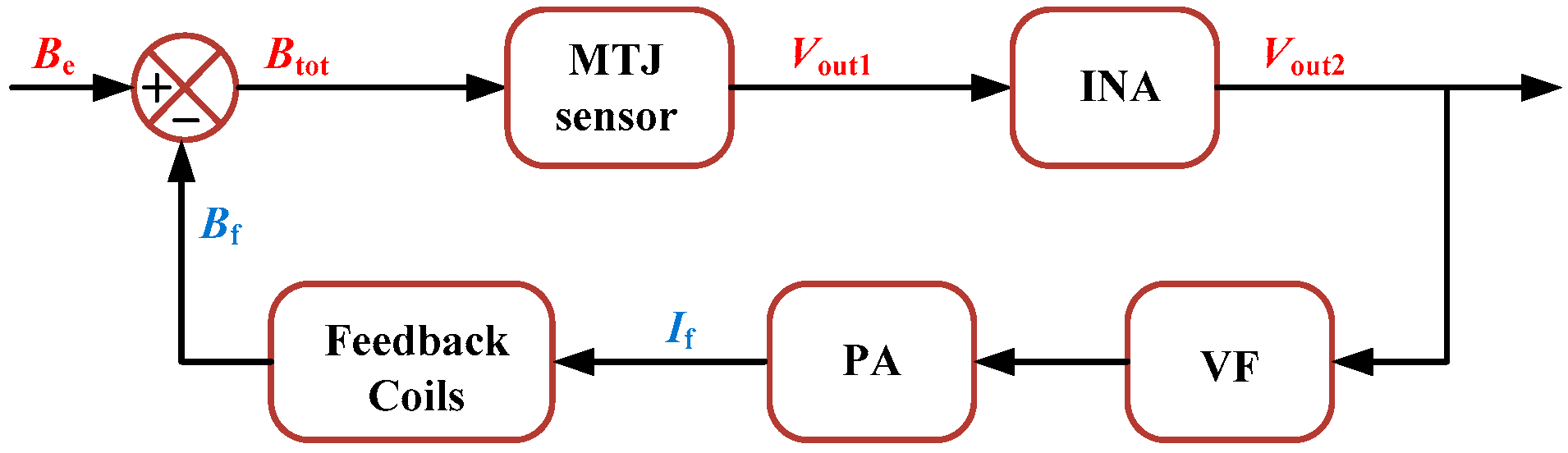
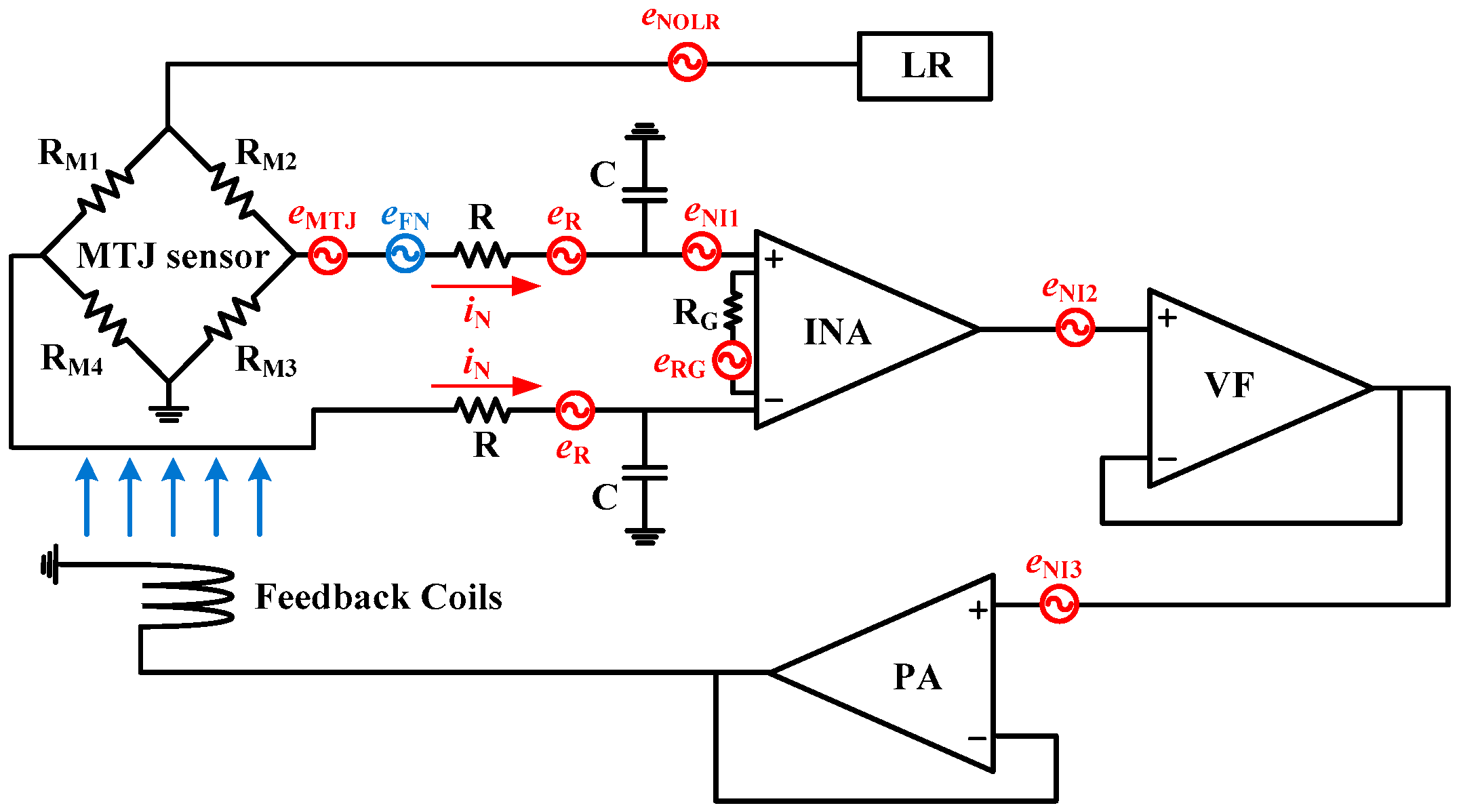
2.2. Design of Signal Conditioning Circuit and Feedback Circuit
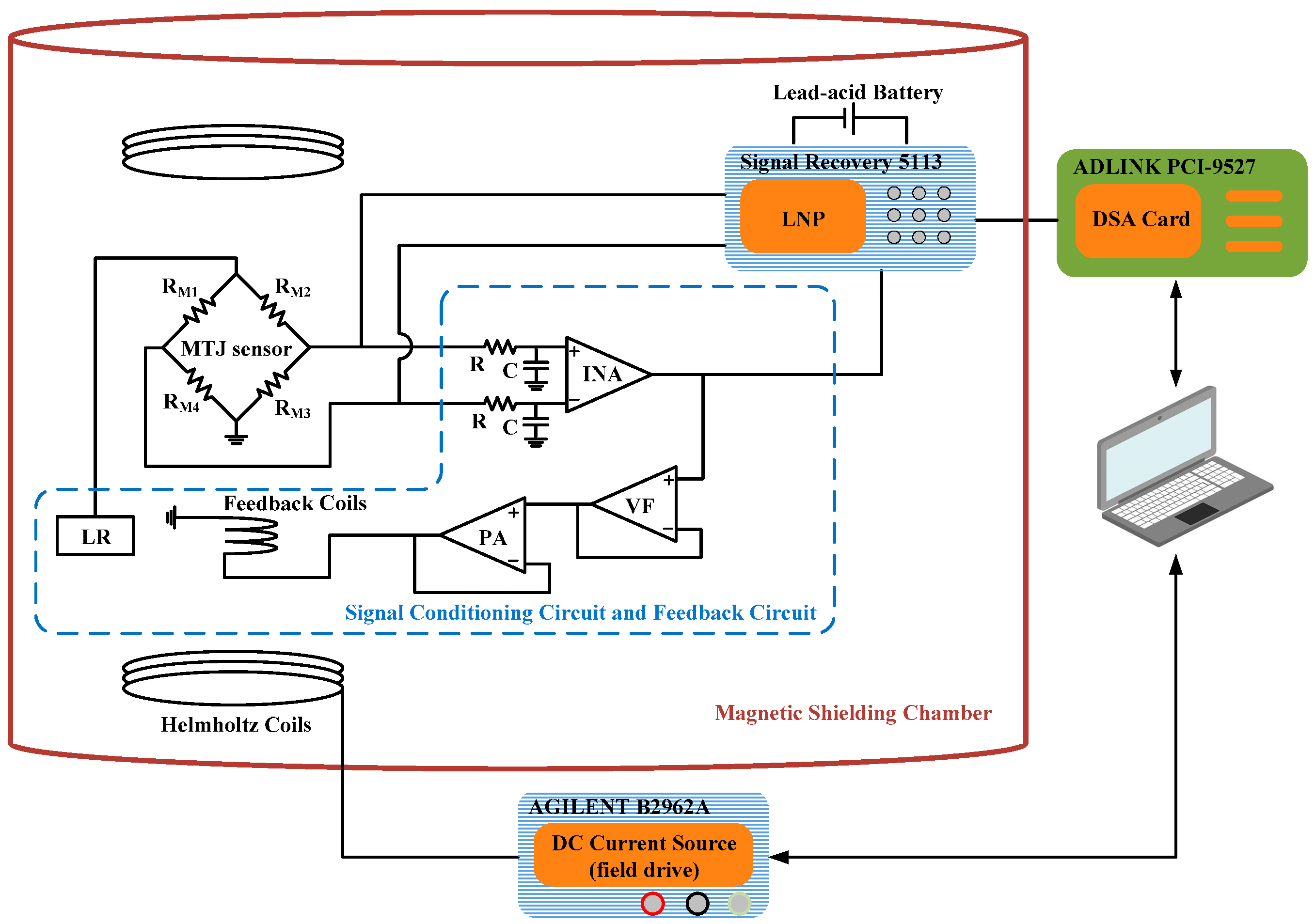
3. Noise Measurement Setup
4. Results and Discussion
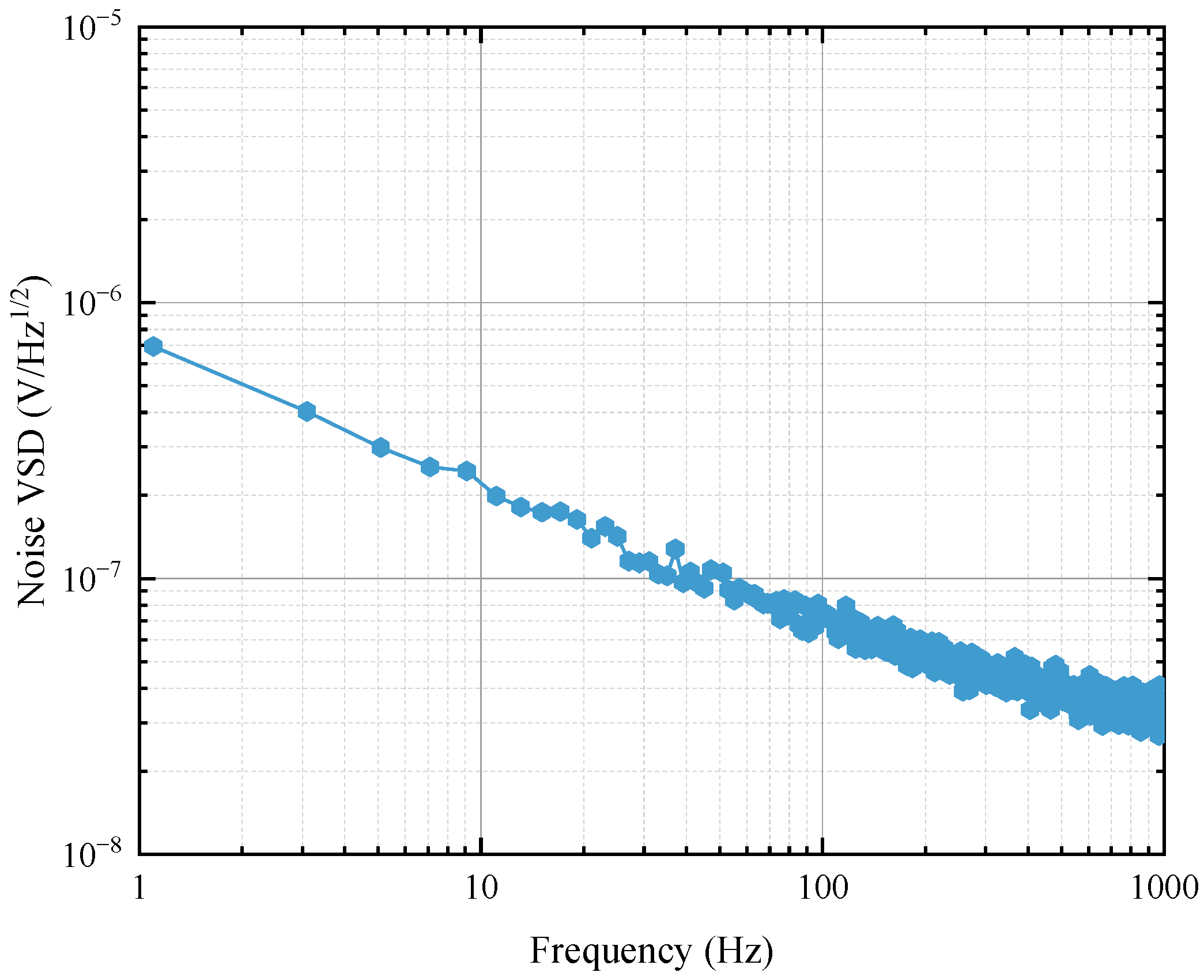
4.1. MTJ Sensor Noise Model and Measurement
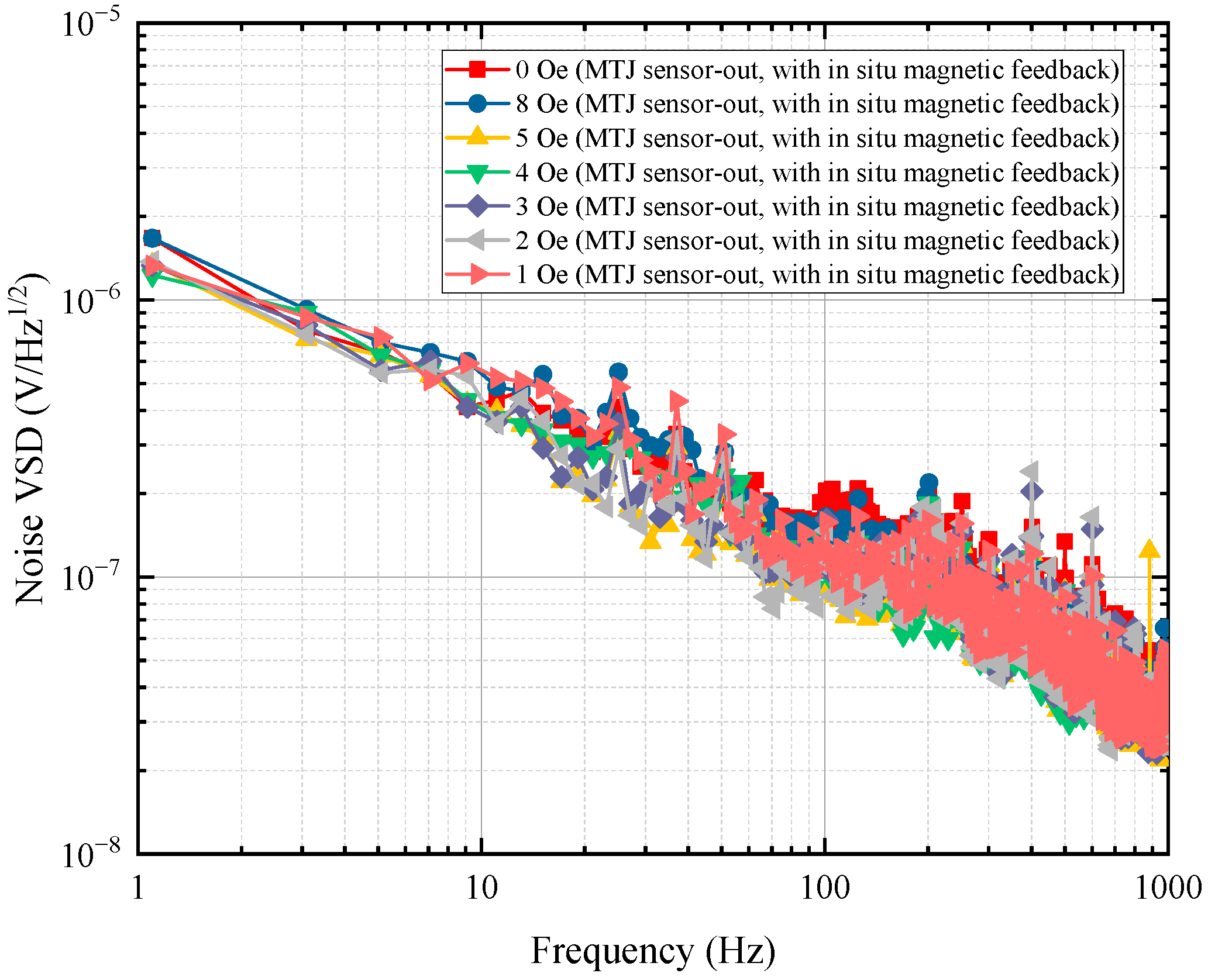
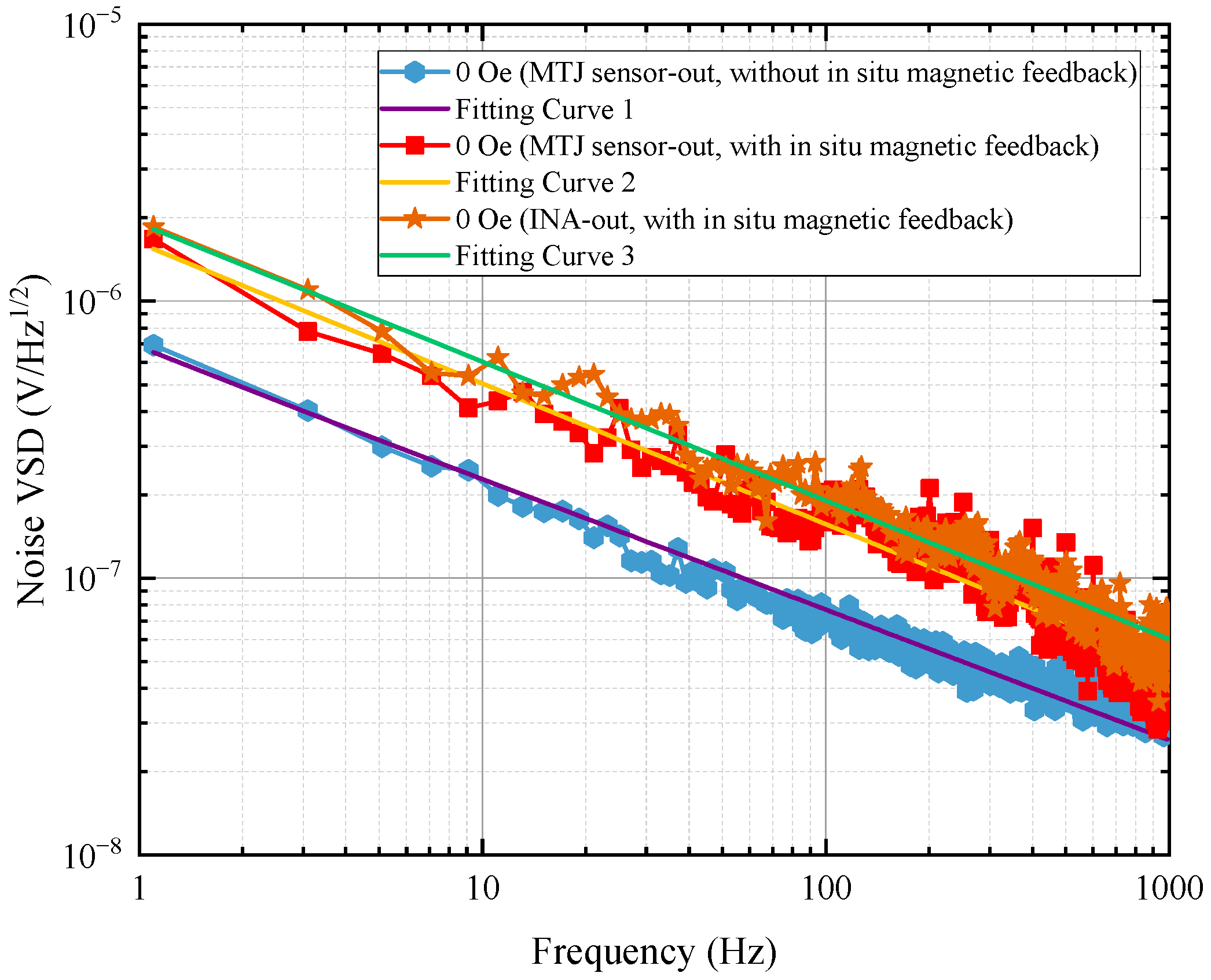
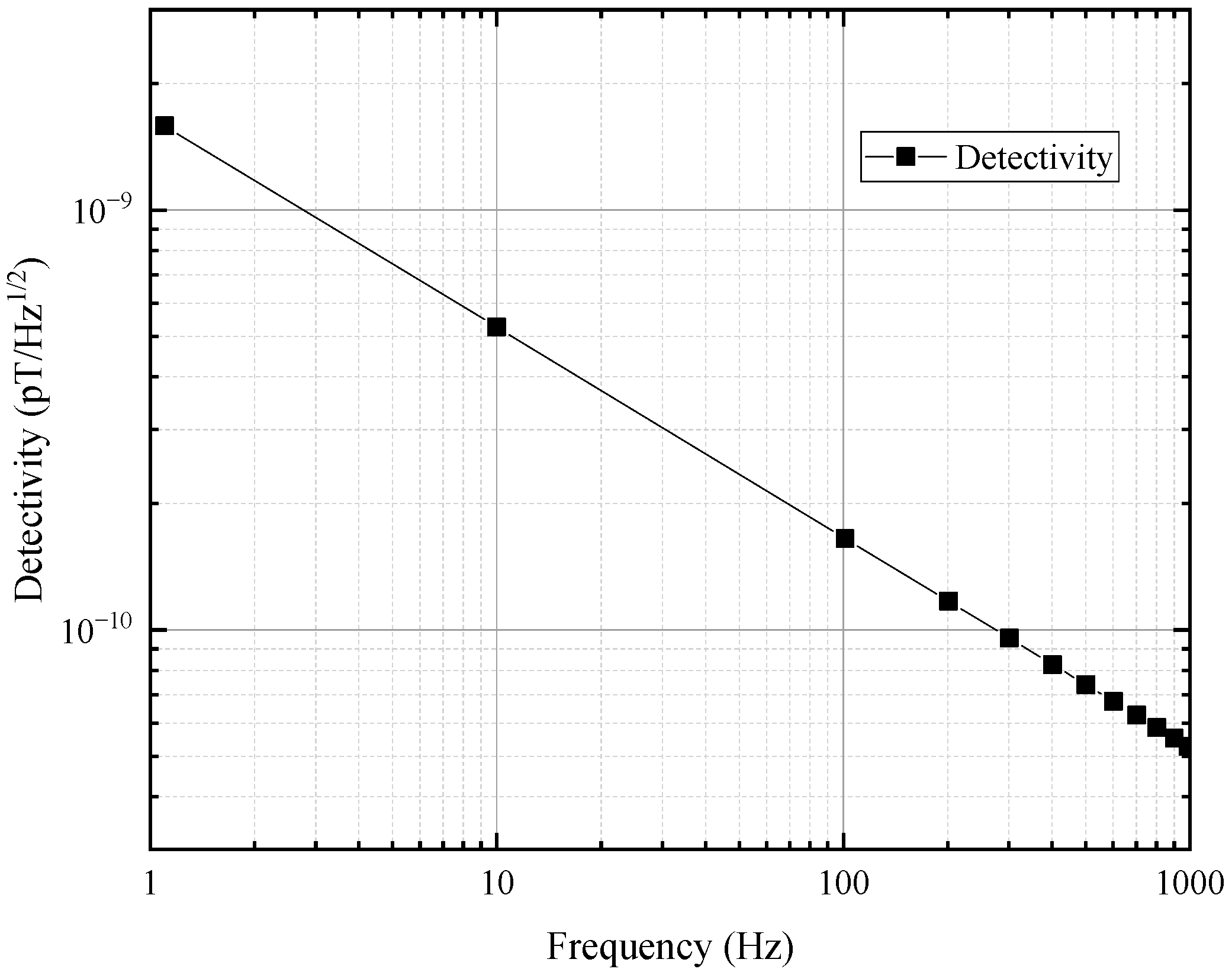
4.2. Magnetometer Noise Model and Measurement
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yan, S.; Zhou, Z.; Yang, Y.; Leng, Q.; Zhao, W. Developments and Applications of Tunneling Magnetoresistance Sensors. Tsinghua Sci. Technol. 2022, 27, 443–454. [Google Scholar] [CrossRef]
- Zheng, C.; Zhu, K.; de Freitas, S.C.; Chang, J.-Y.; Davies, J.E.; Eames, P.; Freitas, P.P.; Kazakova, O.; Kim, C.; Leung, C.-W.; et al. Magnetoresistive Sensor Development Roadmap (Non-Recording Applications). IEEE Trans. Magn. 2019, 55, 0800130. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, J. Current Progress of Magnetoresistance Sensors. Chemosensors 2021, 9, 211. [Google Scholar] [CrossRef]
- Willing, S.; Schlage, K.; Bocklage, L.; Ramin Moayed, M.M.; Gurieva, T.; Meier, G.; Rohlsberger, R. Novel Tunnel Magnetoresistive Sensor Functionalities via Oblique-Incidence Deposition. ACS Appl. Mater. Interfaces 2021, 13, 32343–32351. [Google Scholar] [CrossRef]
- Lim, B.; Mahfoud, M.; Das, P.T.; Jeon, T.; Jeon, C.; Kim, M.; Nguyen, T.-K.; Tran, Q.-H.; Terki, F.; Kim, C. Advances and key technologies in magnetoresistive sensors with high thermal stabilities and low field detectivities. APL Mater. 2022, 10, 51108. [Google Scholar] [CrossRef]
- Maciel, N.; Marques, E.; Naviner, L.; Zhou, Y.; Cai, H. Magnetic Tunnel Junction Applications. Sensors 2020, 20, 121. [Google Scholar] [CrossRef]
- Nicolas, H.; Sousa, R.C.; Mora-Hernández, A.; Prejbeanu, I.-L.; Hebrard, L.; Kammerer, J.-B.; Pascal, J. Conditioning Circuits for Nanoscale Perpendicular Spin Transfer Torque Magnetic Tunnel Junctions as Magnetic Sensors. IEEE Sens. J. 2023, 23, 5670–5680. [Google Scholar] [CrossRef]
- Bai, R.; Qian, Z.; Zhu, H.; Li, Q.; Li, Y.; Peng, Y.; Huo, D. Effect of Buffer Layers on the Properties of NiFe/Cu/NiFe Trilayers. IEEE Trans. Magn. 2017, 53, 4400104. [Google Scholar] [CrossRef]
- Qian, Z.; Wang, D.; Daughton, J.; Tondra, M.; Nordman, C.; Popple, A. Linear Spin-Valve Bridge Sensing Devices. IEEE Trans. Magn. 2004, 40, 2643–2645. [Google Scholar] [CrossRef]
- García Vidal, E.; Ramírez Muñoz, D.; Ravelo Arias, S.I.; Sánchez Moreno, J.; Cardoso, S.; Ferreira, R.; Freitas, P. Electronic Energy Meter Based on a Tunnel Magnetoresistive Effect (TMR) Current Sensor. Materials 2017, 10, 1134. [Google Scholar] [CrossRef]
- Ziegler, S.; Woodward, R.C.; Iu, H.H.-C.; Borle, L.J. Current Sensing Techniques: A Review. Current Sensing Techniques: A Review. IEEE Sens. J. 2009, 9, 354–376. [Google Scholar] [CrossRef]
- Yu, J.; Long, Z.; Liang, S.; Yue, C.; Yin, X.; Zhou, F. Optimal design of dual air-gap closed-loop TMR current sensor based on minimum magnetic field uniformity coefficient. Sci. Rep. 2023, 13, 239. [Google Scholar] [CrossRef] [PubMed]
- Sen, T.; Sreekantan, A.C.; Sen, S. A Magnetic Feedback-Based Δ–Σ Digitizing Interface for Giant Magnetoresistance Sensors. IEEE Trans. Circuits Syst. 2023, 70, 36–40. [Google Scholar] [CrossRef]
- Bernieri, A.; Betta, G.; Ferrigno, L.; Laracca, M. Improving Performance of GMR Sensors. IEEE Sens. J. 2013, 13, 4513–4520. [Google Scholar] [CrossRef]
- Davies, J.E.; Watts, J.D.; Novotny, J.; Huang, D.; Eames, P.G. Magnetoresistive sensor detectivity: A comparative analysis. Appl. Phys. Lett. 2021, 118, 062401. [Google Scholar] [CrossRef]
- Monteblanco, E.; Solignac, A.; Chopin, C.; Moulin, J.; Belliot, P.; Belin, N.; Campiglio, P.; Fermon, C.; Pannetier-Lecoeur, M. Normalization and Correction Factors for Magnetic Tunnel Junction Sensor Performances Comparison. IEEE Sens. J. 2021, 21, 15993–15998. [Google Scholar] [CrossRef]
- Weitensfelder, H.; Brueckl, H.; Satz, A.; Pruegl, K.; Zimmer, J.; Luber, S.; Raberg, W.; Abert, C.; Bruckner, F.; Bachleitner-Hofmann, A.; et al. Comparison of Sensitivity and Low-Frequency Noise Contributions in Giant-Magnetoresistive and Tunneling-Magnetoresistive Spin-Valve Sensors with a Vortex-State Free Layer. Phys. Rev. Appl. 2018, 10, 054056. [Google Scholar] [CrossRef]
- Zhang, X.; Ji, M.; Pan, M.; Sun, K.; Hu, Y.; Du, Q.; Li, P.; Peng, J.; Hu, J.; Qiu, W. Effective measurement of magnetic tunneling junction noise based on the equivalent noise model. J. Magn. Magn. Mater. 2023, 580, 170930. [Google Scholar] [CrossRef]
- Yuan, Z.H.; Feng, J.F.; Guo, P.; Wan, C.H.; Wei, H.X.; Ali, S.S.; Han, X.F.; Nakano, T.; Naganuma, H.; Ando, Y. Low frequency noise in magnetic tunneling junctions with Co40Fe40B20/Co70.5Fe4.5Si15B10 composite free layer. J. Magn. Magn. Mater. 2016, 398, 215–219. [Google Scholar] [CrossRef]
- Egelhoff, W.; Pong, P.; Unguris, J.; McMichael, R.; Nowak, E.; Edelstein, A.; Burnette, J.E.; Fischer, G.A. Critical challenges for picoTesla magnetic-tunnel-junction sensors. Sens. Actuators A Phys. 2009, 155, 217–225. [Google Scholar] [CrossRef]
- Lyu, H.; Liu, Z.; Wang, Z.; Yang, W.; Xiong, X.; Chen, J.; Zou, X. A high-resolution MEMS magnetoresistive sensor utilizing magnetic tunnel junction motion modulation driven by the piezoelectric resonator. Appl. Phys. Lett. 2022, 121, 123504. [Google Scholar] [CrossRef]
- Nakatani, T.; Suto, H.; Kulkarni, P.D.; Iwasaki, H.; Sakuraba, Y. Tunnel magnetoresistance sensors with symmetric resistance-field response and noise properties under AC magnetic field modulation. Appl. Phys. Lett. 2022, 121, 192406. [Google Scholar] [CrossRef]
- Jin, Z.; Wang, Y.; Fujiwara, K.; Oogane, M.; Ando, Y. Detection of Small Magnetic Fields Using Serial Magnetic Tunnel Junctions with Various Geometrical Characteristics. Sensors 2020, 20, 5704. [Google Scholar] [CrossRef]
- Gao, J.; Wang, J.; Shen, Y.; Jiang, Z.; Huang, Y.; Yu, Q. Equivalent Magnetic Noise Analysis for a Tunneling Magnetoresistive Magnetometer. IEEE Electron Device Lett. 2020, 41, 1400–1403. [Google Scholar] [CrossRef]
- Du, Q.; Hu, J.; Pan, M.; Chen, D.; Sun, K.; Pan, L.; Che, Y.; Zhang, X.; Li, P.; Zhang, J.; et al. Effect of magnetic flux modulation on noise characteristics of tunnel magnetoresistive sensors. Appl. Phys. Lett. 2020, 116, 102405. [Google Scholar] [CrossRef]
- Dou, A.; Bai, R.; Zhu, H.; Qian, Z. Noise measurement and system calibration on magnetoresistive sensors. Sens. Rev. 2023, 43, 200–207. [Google Scholar]
- Roldán, A.; Roldán, J.B.; Reig, C.; Cardoso, S.; Cardoso, F.; Ferreira, R.; Freitas, P.P. An in-depth noise model for giant magnetoresistance current sensors for circuit design and complementary metal-oxide-semiconductor integration. J. Appl. Phys. 2014, 115, 17E514. [Google Scholar] [CrossRef]
- Stutzke, N.A.; Russek, S.E.; Pappas, D.P.; Tondra, M. Low-frequency noise measurements on commercial magnetoresistive magnetic field sensors. J. Appl. Phys. 2005, 97, 10Q107. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Noise Source | Noise Type | RTI Noise VSD (V/Hz1/2) |
|---|---|---|
| MTJ sensor | thermal-shot noise | eMTJ |
| thermal-magnetic noise | ||
| 1/f noise | ||
| LR (LT3045) | output voltage noise—eNOLR | eNOLR |
| Low-pass filter | thermal noise—eR | |
| INA (INA849) | input voltage noise—eNI1 | |
| current noise—iN | , | |
| thermal noise—eRG | ||
| VF (ADA4075-2) | input voltage noise—eNI2 | |
| PA (OPA549) | input voltage noise—eNI3 | |
| Feedback Noise | magnetic noise—eFN | eFN |
| Device | eNI (nV/Hz1/2) | eNO (nV/Hz1/2) | iN (fA/Hz1/2) |
|---|---|---|---|
| LT3045 | 70 | ||
| INA849 | 3 | 3 | |
| ADA4075-2 | 3.5 | ||
| OPA549 | 120 |
| Noise Source | Noise Type | Calculated RTI Noise VSD (nV/Hz1/2) |
|---|---|---|
| MTJ sensor | thermal-shot noise | 224 |
| thermal-magnetic noise | ||
| 1/f noise | ||
| LR(LT3045) | output voltage noise—eNOLR | 70 |
| Low pass filter | thermal noise—eR | 4 |
| INA (INA849) | input voltage noise—eNI1 | 3 |
| current noise—iN | 0.08 | |
| thermal noise—eRG | 0.8 | |
| VF (ADA4075-2) | input voltage noise—eNI2 | 0.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dou, A.; Bai, R.; Sun, Y.; Tu, J.; Kou, C.; Xie, X.; Qian, Z. Equivalent Noise Analysis and Modeling for a Magnetic Tunnel Junction Magnetometer with In Situ Magnetic Feedback. Magnetochemistry 2023, 9, 214. https://doi.org/10.3390/magnetochemistry9100214
Dou A, Bai R, Sun Y, Tu J, Kou C, Xie X, Qian Z. Equivalent Noise Analysis and Modeling for a Magnetic Tunnel Junction Magnetometer with In Situ Magnetic Feedback. Magnetochemistry. 2023; 9(10):214. https://doi.org/10.3390/magnetochemistry9100214
Chicago/Turabian StyleDou, Aiyu, Ru Bai, Yucheng Sun, Jiakun Tu, Chuanjia Kou, Xin Xie, and Zhenghong Qian. 2023. "Equivalent Noise Analysis and Modeling for a Magnetic Tunnel Junction Magnetometer with In Situ Magnetic Feedback" Magnetochemistry 9, no. 10: 214. https://doi.org/10.3390/magnetochemistry9100214
APA StyleDou, A., Bai, R., Sun, Y., Tu, J., Kou, C., Xie, X., & Qian, Z. (2023). Equivalent Noise Analysis and Modeling for a Magnetic Tunnel Junction Magnetometer with In Situ Magnetic Feedback. Magnetochemistry, 9(10), 214. https://doi.org/10.3390/magnetochemistry9100214