

Occurrence of Wetness on the Fruit Surface Modeled Using Spatio-Temporal Temperature Data from Sweet Cherry Tree Canopies


Abstract
1. Introduction
2. Materials and Methods
2.1. Experimental Set-Up
2.2. Canopy Scanning
2.3. Reference Temperature and Wetness Measurements
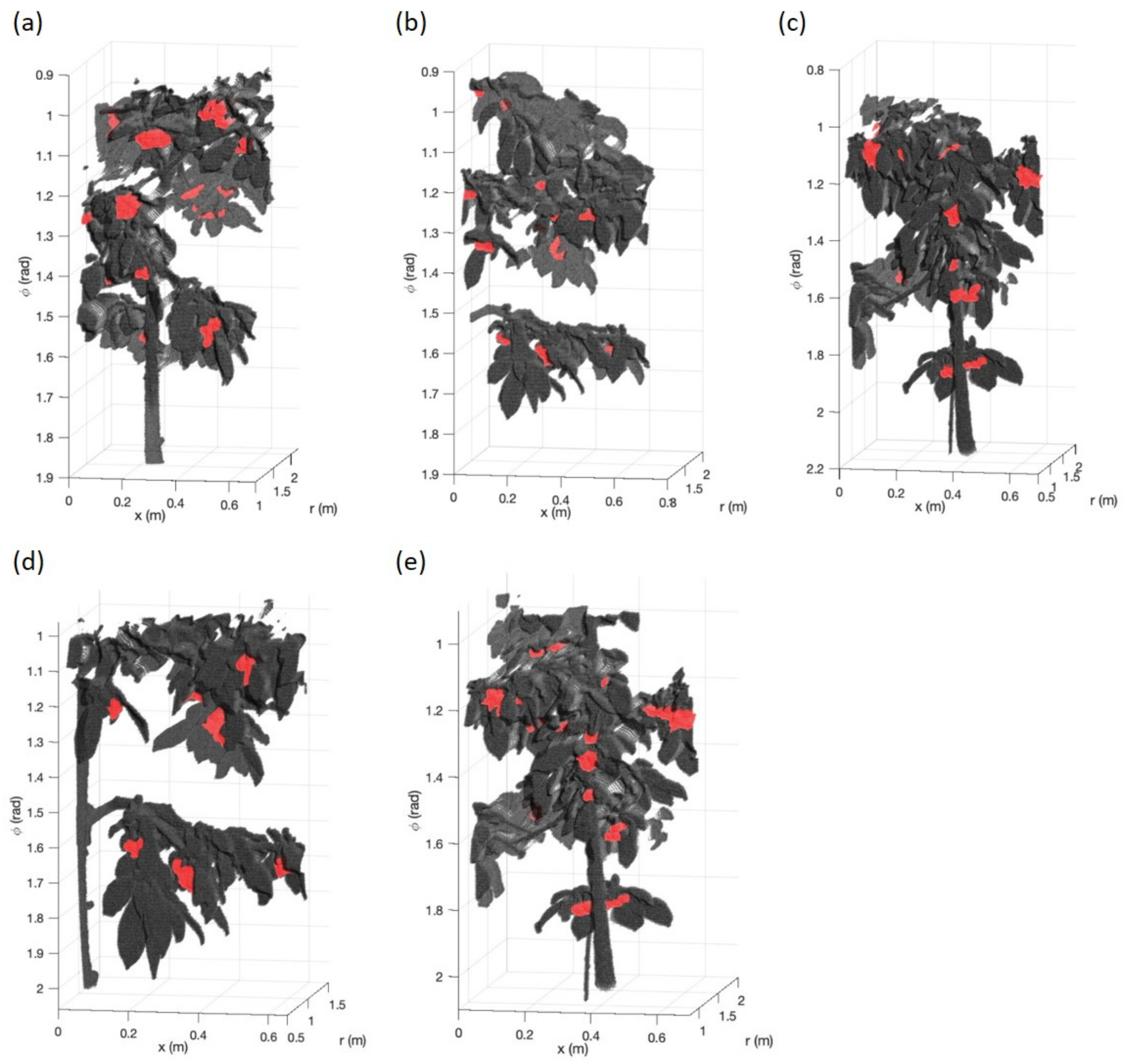
2.4. Analysis of Geometric Features of LiDAR 4D Point Clouds
2.5. Analyzing the Dew Point Temperature Threshold Index
3. Results
3.1. Temperature Recording by Means of LiDAR 4D Point Clouds
3.2. Temperature Change in Sweet Cherry Canopies
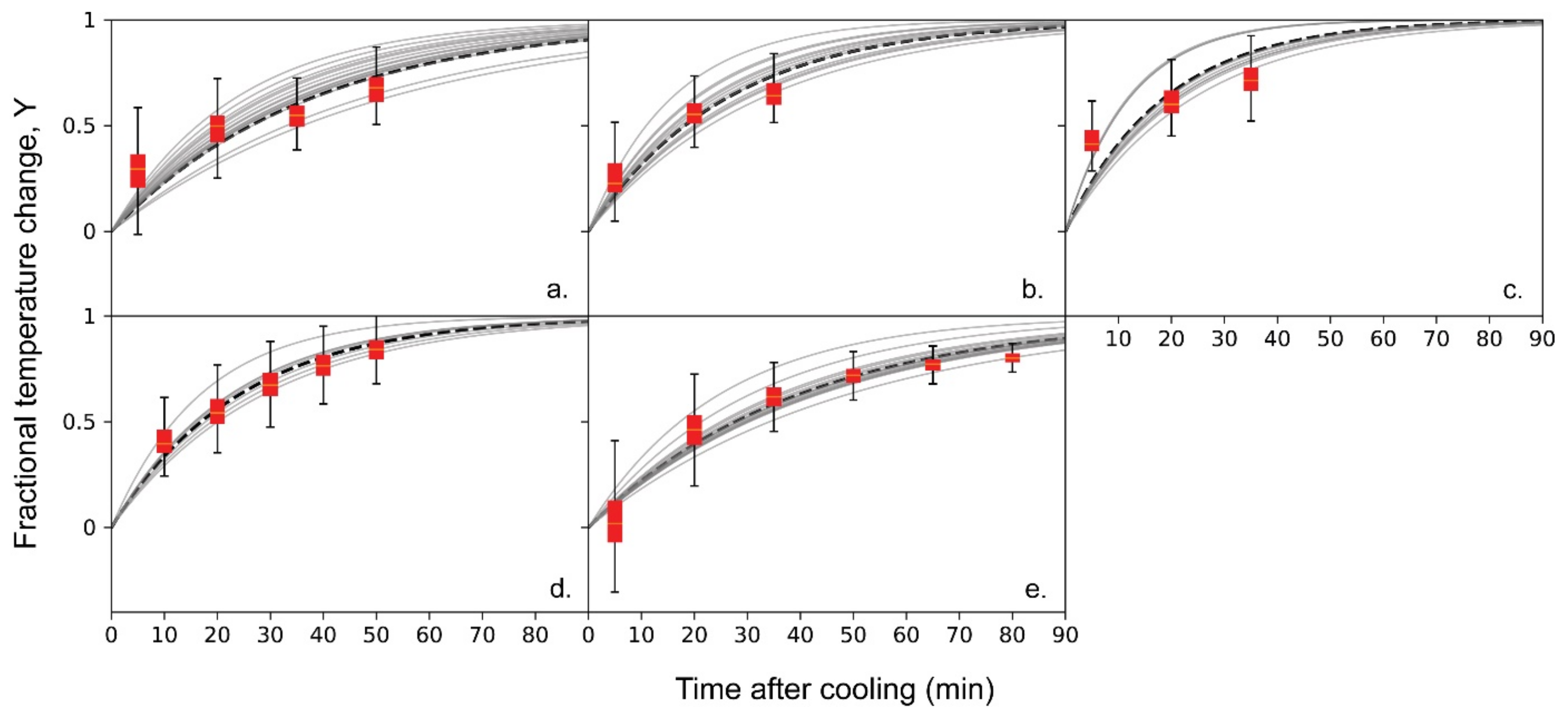
3.3. Temperature Kinetics of Sweet Cherry Clusters
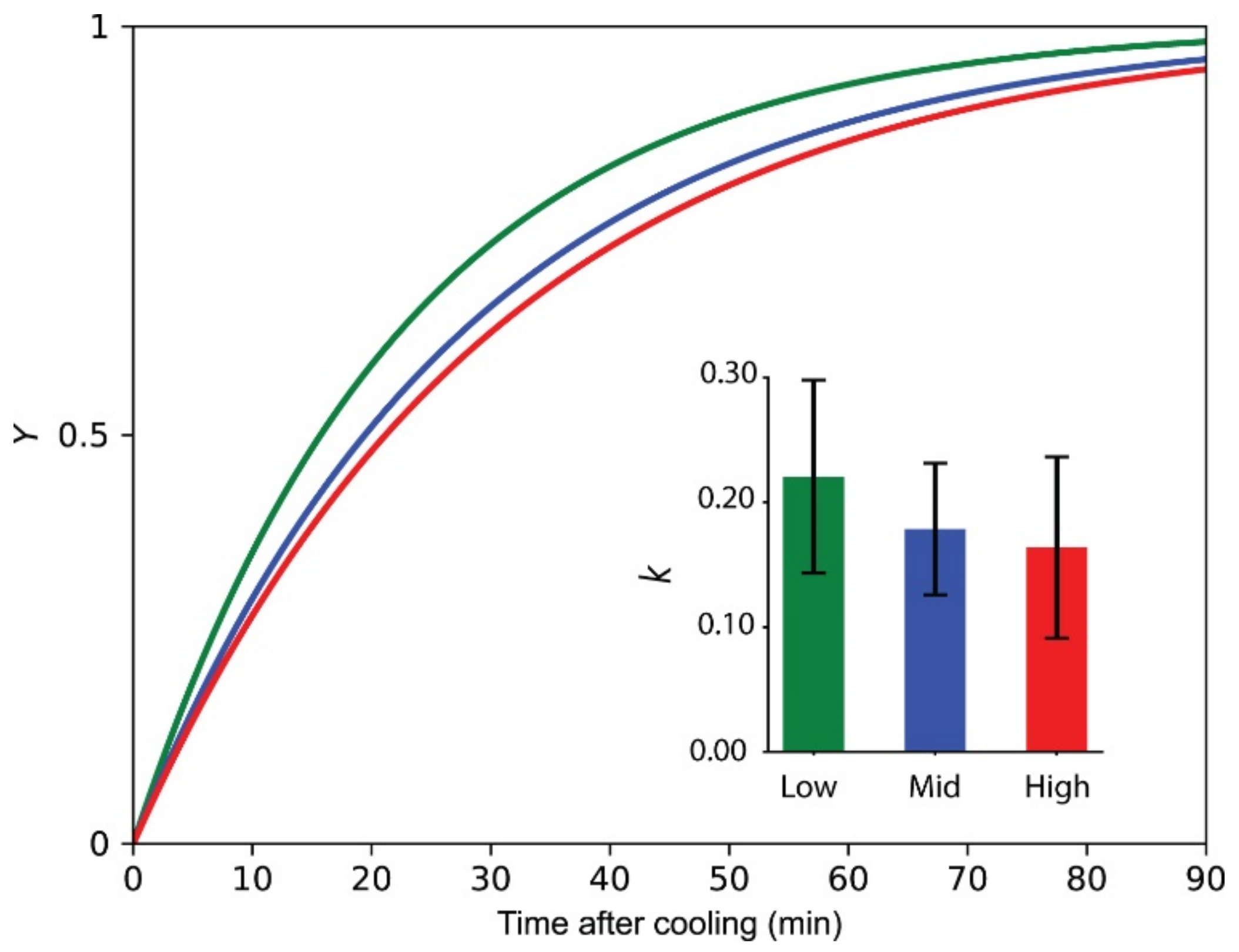
3.4. Effect of Microclimate on Thermal Kinetics and Wetness Occurrence of Sweet Cherry
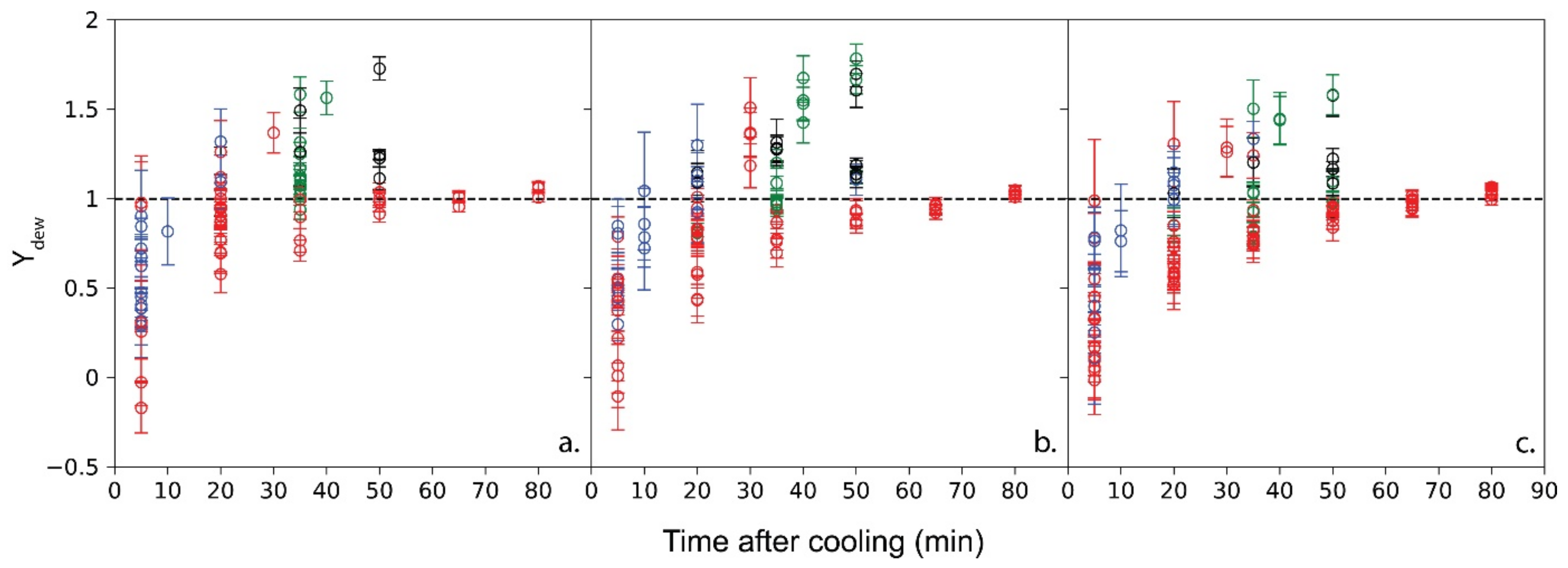
3.5. Estimation of Occurrence of Wetness
4. Discussion
4.1. Spatio-Temporal Temperature and Wetness Analysis Using LiDAR 4D Point Clouds
4.2. Thermal Kinetics and Wetness Occurrence Considering Sweet Cherry Surface
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Santos, M.; Egea-Cortines, M.; Gonçalves, B.; Matos, M. Molecular mechanisms involved in fruit cracking: A review. Front. Plant Sci. 2023, 14, 1130857. [Google Scholar]
- La Spada, P.; Dominguez, E.; Continella, A.; Heredia, A.; Gentile, A. Factors influencing fruit cracking: An environmental and agronomic perspective. Front. Plant Sci. 2024, 15, 1343452. [Google Scholar]
- Juan, L.; Chen, J. Citrus Fruit-Cracking: Causes and Occurrence. Hortic. Plant J. 2017, 3, 255–260. [Google Scholar]
- Christensen, J.V. Rain-induced cracking of sweet cherries: Its causes and prevention. In Cherries: Crop Physiology, Production and Uses; Webster, A.D., Looney, N.E., Eds.; CAB International: Wallingford, UK, 1996; pp. 297–327. [Google Scholar]
- Knoche, M.; Winkler, A. Rain-induced cracking of sweet cherries. In Cherries: Botany, Production and Uses; Quero-García, J., Iezzoni, A., Puławska, J., Lang, G., Eds.; CAB International: Wallingford, UK, 2017; pp. 140–165. [Google Scholar]
- Looney, N.E. Benefits of calcium sprays below expectations in BC tests. Goodfruit Grow. 1985, 36, 7–8. [Google Scholar]
- Verner, L.; Blodgett, E.C. Physiological studies of the cracking of sweet cherries. Bull. Agric. Exp. Sta. Univ. Idaho 1931, 184, 1–15. [Google Scholar]
- Glenn, G.M.; Poovaiah, B.W. Cuticular Properties and Postharvest Calcium Applications Influence Cracking of Sweet Cherries. J. Am. Soc. Hortic. Sci. 1989, 114, 781–788. [Google Scholar]
- Winkler, A.; Peschel, S.; Kohrs, K.; Knoche, M. Rain Cracking in Sweet Cherries is not Due to Excess Water Uptake but to Localized Skin Phenomena. J. Am. Soc. Hortic. Sci. 2016, 141, 653–660. [Google Scholar]
- Winkler, A.; Blumenberg, I.; Schürmann, L.; Knoche, M. Rain cracking in sweet cherries is caused by surface wetness, not by water uptake. Sci. Hortic. 2020, 269, 109400. [Google Scholar]
- Brüggenwirth, M.; Knoche, M. Cell wall swelling, fracture mode, and the mechanical properties of cherry fruit skins are closely related. Planta 2017, 245, 765–777. [Google Scholar] [PubMed]
- Schumann, C.; Winkler, A.; Brüggenwirth, M.; Köpcke, K.; Knoche, M. Crack initiation and propagation in sweet cherry skin: A simple chain reaction causes the crack to ‘run’. PLoS ONE 2019, 14, e0219794. [Google Scholar]
- Peschel, S.; Knoche, M. Characterization of microcracks in the cuticle of developing sweet cherry fruit. J. Am. Soc. Hortic. Sci. 2005, 130, 487–495. [Google Scholar]
- Knoche, M.; Peschel, S. Water on the Surface Aggravates Microscopic Cracking of the Sweet Cherry Fruit Cuticle. J. Am. Soc. Hortic. Sci. 2006, 131, 192–200. [Google Scholar]
- Gonçalves, B.; Silva, V.; Bacelar, E.; Guedes, F.; Ribeiro, C.; Silva, A.P.; Pereira, S. Orchard Net Covers Improve Resistance to Cherry Cracking Disorder. Foods 2023, 12, 543. [Google Scholar] [CrossRef]
- Pino, S.; Palma, M.; Sepúlveda, Á.; Sánchez-Contreras, J.; Moya, M.; Yuri, J.A. Effect of Rain Cover on Tree Physiology and Fruit Condition and Quality of ‘Rainier’, ‘Bing’ and ‘Sweetheart’ Sweet Cherry Trees. Horticulturae 2023, 9, 109. [Google Scholar] [CrossRef]
- Cline, J.A.; Meland, M.; Sekse, L.; Webster, A.D. Rain Cracking of Sweet Cherries: II. Influence of Rain Covers and Rootstocks on Cracking and Fruit Quality. Acta Agric. Scand. Sect. B Soil Plant Sci. 1995, 45, 224–230. [Google Scholar]
- Saha, K.K.; Zude-Sasse, M. Estimation of chlorophyll content in banana during shelf life using LiDAR laser scanner. Postharvest Biol. Technol. 2022, 192, 112011. [Google Scholar] [CrossRef]
- Tsoulias, N.; Paraforos, D.S.; Xanthopoulos, G.; Zude-Sasse, M. Apple Shape Detection Based on Geometric and Radiometric Features Using a LiDAR Laser Scanner. Remote Sens. 2020, 12, 2481. [Google Scholar] [CrossRef]
- Tapia-Zapata, N.; Saha, K.K.; Tsoulias, N.; Zude-Sasse, M. A geometric modelling approach to estimate apple fruit size by means of LiDAR 3D point clouds. Int. J. Food Prop. 2024, 27, 566–583. [Google Scholar]
- Tsoulias, N.; Saha, K.K.; Zude-Sasse, M. In-situ fruit analysis by means of LiDAR 3D point cloud of normalized difference vegetation index (NDVI). Comput. Electron. Agric. 2023, 205, 107611. [Google Scholar]
- Tsoulias, N.; Jörissen, S.; Nüchter, A. An approach for monitoring temperature on fruit surface by means of thermal point cloud. MethodsX 2022, 9, 101712. [Google Scholar]
- Osroosh, Y.; Peters, R.T. Detecting fruit surface wetness using a custom-built low-resolution thermal-RGB imager. Comput. Electron. Agric. 2019, 157, 509–517. [Google Scholar]
- Ranjan, R.; Sinha, R.; Khot, L.R.; Whiting, M. Thermal-RGB imagery and in-field weather sensing derived sweet cherry wetness prediction model. Sci. Hortic. 2022, 294, 110782. [Google Scholar]
- Defraeye, T.; Cronjé, P.; Berry, T.; Opara, U.L.; East, A.; Hertog, M.; Verboven, P.; Nicolai, B. Towards integrated performance evaluation of future packaging for fresh produce in the cold chain. Trends Food Sci. Technol. 2015, 44, 201–225. [Google Scholar]
- Gottschalk, K.; Linke, M.; Mészáros, C.; Farkas, I. Modeling Condensation and Evaporation on Fruit Surface. Dry. Technol. 2007, 25, 1237–1242. [Google Scholar]
- Lawrence, M.G. The Relationship between Relative Humidity and the Dew point Temperature in Moist Air: A Simple Conversion and Applications. Bull. Am. Meteorol. Soc. 2005, 86, 225–234. [Google Scholar]
- Thompson, J. Pre-cooling and storage facilities. In USDA Agriculture Handbook 66: The Commercial Storage of Fruits, Vegetables, and Florist and Nursery Stocks; USDA, Ed.; USDA: Washington, DC, USA, 2004; pp. 1–10. [Google Scholar]
- Minkina, W. Appendix B: Normal Emissivities of Various Materials. In Infrared Thermography: Errors and Uncertainties; Minkina, W., Dudzik, S., Eds.; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Linke, M.; Praeger, U.; Mahajan, P.V.; Geyer, M. Water vapour condensation on the surface of bulky fruit: Some basics and a simple measurement method. J. Food Eng. 2021, 307, 110661. [Google Scholar]
- Lufu, R.; Ambaw, A.; Opara, U.L. Determination of moisture loss of pomegranate cultivars under cold and shelf storage conditions and control strategies. Sustain. Food Technol. 2023, 1, 79–91. [Google Scholar]
- Defraeye, T.; Lambrecht, R.; Delele, M.A.; Tsige, A.A.; Opara, U.L.; Cronjé, P.; Verboven, P.; Nicolai, B. Forced-convective cooling of citrus fruit: Cooling conditions and energy consumption in relation to package design. J. Food Eng. 2014, 121, 118–127. [Google Scholar]
- Jantapirak, S.; Laguerre, O.; Denis, A.; Salomon, Y.P.; Flick, D.; Vangnai, K.; Jittanit, W.; Duret, S. Experimental simulation of temperature non-uniformity in a loaded container along air cargo supply chain: Mango case study. J. Food Eng. 2024, 380, 112161. [Google Scholar]
- Brüggenwirth, M.; Winkler, A.; Knoche, M. Xylem, phloem, and transpiration flows in developing sweet cherry. Trees 2016, 30, 1821–1830. [Google Scholar]
- Brüggenwirth, M.; Moritz, K. Factors affecting mechanical properties of the skin of sweet cherry fruit. J. Amer. Soc. Hort. Sci. 2016, 141, 45–53. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tree Number | t1 | t2 | t3 | t4 | t5 | t6 | No. Point Clouds |
|---|---|---|---|---|---|---|---|
| #1 | 5 | 20 | 35 | 50 | – | – | 17 |
| #2 | 5 | 20 | 35 | – | – | – | 12 |
| #3 | 5 | 20 | 35 | – | – | – | 11 |
| #4 | 10 | 20 | 30 | 40 | 50 | – | 7 |
| #5 | 5 | 20 | 35 | 50 | 65 | 80 | 15 |
| Parameter | Sweet Cherry Canopy (No.) | ||||
|---|---|---|---|---|---|
| #1 | #2 | #3 | #4 | #5 | |
| ϕlim (rad) | 1.35 | 1.50 | 1.50 | 1.50 | 1.50 |
| xleft (m) | 0.12 | – | 0.20 | – | 0.25 |
| xright (m) | 0.30 | 0 | 0.50 | 0 | 0.50 |
| Tree | k | RMSE | R2 |
|---|---|---|---|
| #1 | 0.13 | 0.09 | 0.86 |
| #2 | 0.19 | 0.06 | 0.93 |
| #3 | 0.26 | 0.13 | 0.79 |
| #4 | 0.20 | 0.05 | 0.97 |
| #5 | 0.12 | 0.05 | 0.98 |
| Mean | 0.18 | ||
| p-value | >0.05 |
| Variable | Rdensity | ||
|---|---|---|---|
| Low | Mid | High | |
| Rdensity (×104) | 0.4 | 1.2 | 4.2 |
| k | 0.22 | 0.18 | 0.16 |
| R2 | 0.89 | 0.90 | 0.87 |
| RMSE | 0.11 | 0.09 | 0.08 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tapia-Zapata, N.; Winkler, A.; Zude-Sasse, M. Occurrence of Wetness on the Fruit Surface Modeled Using Spatio-Temporal Temperature Data from Sweet Cherry Tree Canopies. Horticulturae 2024, 10, 757. https://doi.org/10.3390/horticulturae10070757
Tapia-Zapata N, Winkler A, Zude-Sasse M. Occurrence of Wetness on the Fruit Surface Modeled Using Spatio-Temporal Temperature Data from Sweet Cherry Tree Canopies. Horticulturae. 2024; 10(7):757. https://doi.org/10.3390/horticulturae10070757
Chicago/Turabian StyleTapia-Zapata, Nicolas, Andreas Winkler, and Manuela Zude-Sasse. 2024. "Occurrence of Wetness on the Fruit Surface Modeled Using Spatio-Temporal Temperature Data from Sweet Cherry Tree Canopies" Horticulturae 10, no. 7: 757. https://doi.org/10.3390/horticulturae10070757
APA StyleTapia-Zapata, N., Winkler, A., & Zude-Sasse, M. (2024). Occurrence of Wetness on the Fruit Surface Modeled Using Spatio-Temporal Temperature Data from Sweet Cherry Tree Canopies. Horticulturae, 10(7), 757. https://doi.org/10.3390/horticulturae10070757