

Comparative Performance Assessment between Incompressible and Compressible Solvers to Simulate a Cavitating Wake



Abstract
1. Introduction
2. Governing Equations
2.1. Mass Conservation Equation
2.2. Momentum Conservation Equation
2.3. Realizable -Epsilon Delayed Detached Eddy Simulation (DDES) Model
2.4. Cavitation Modeling
2.5. Equation of State
2.6. Sponge Layer Conditions
3. Numerical Method
3.1. Incompressible Mixture/VOF Model
3.1.1. Incompressible Volume Continuity Equation
3.1.2. Incompressible Second Phase Fraction Equation
3.2. Compressible Mixture/VOF Model
3.2.1. Compressible Volume Continuity Equation
3.2.2. Compressible Second Phase Fraction Equation
3.3. Pressure Limits
4. Validation
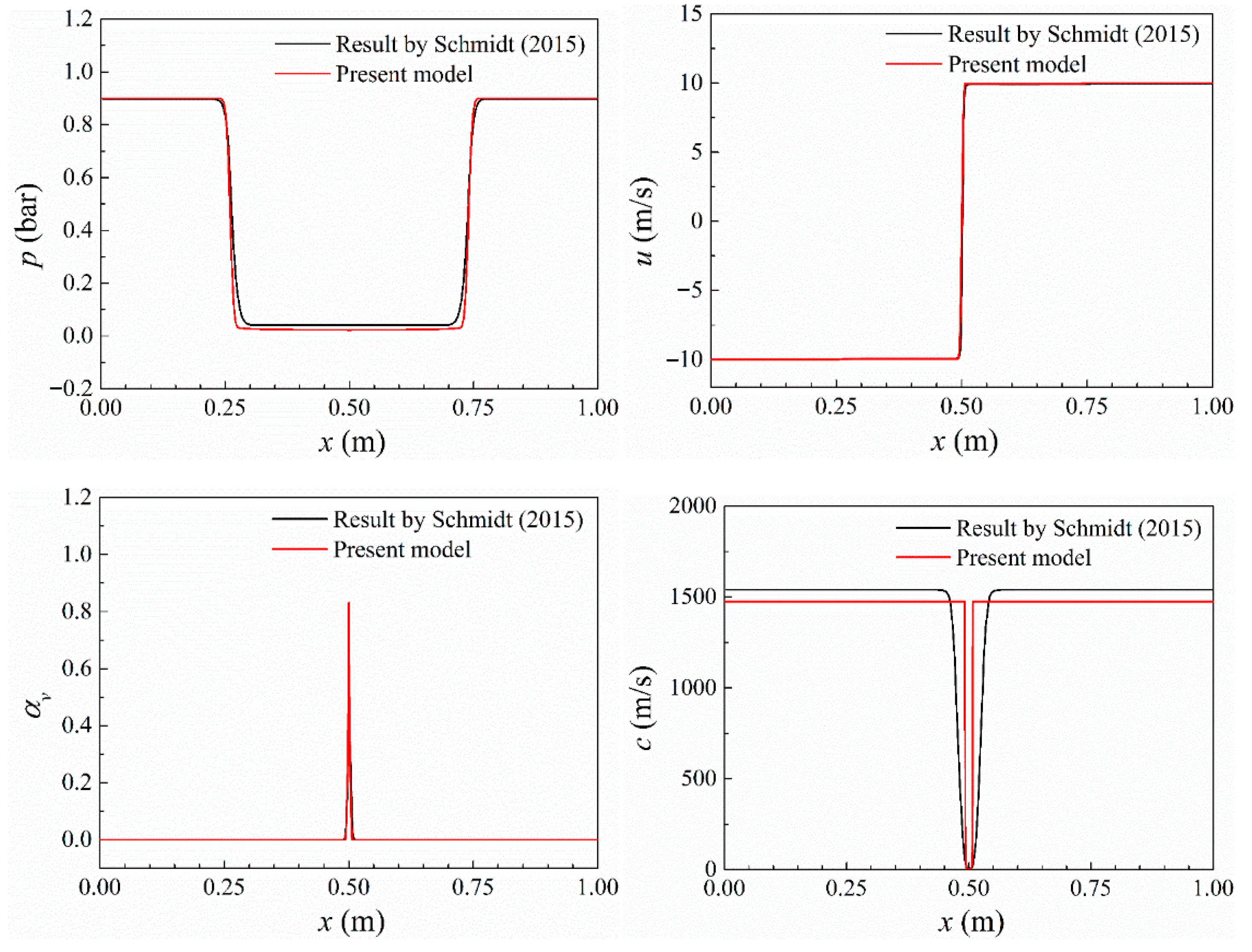
4.1. Case 1: 1-D Two-Phase Time-Dependent Test Case
4.2. Case 2: Cavitating Flow over a Circular Cylinder
5. Results
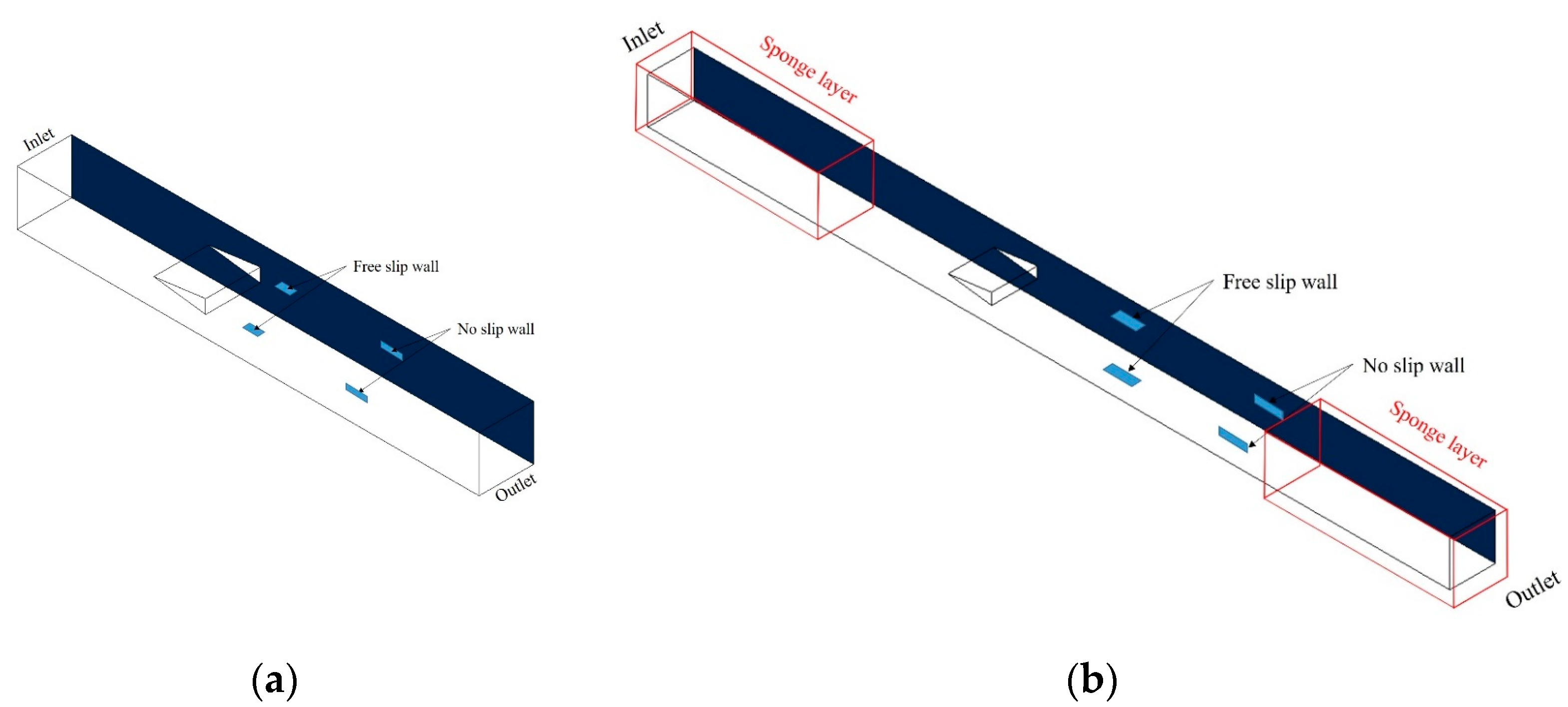
5.1. Computational Domain and Boundary Conditions
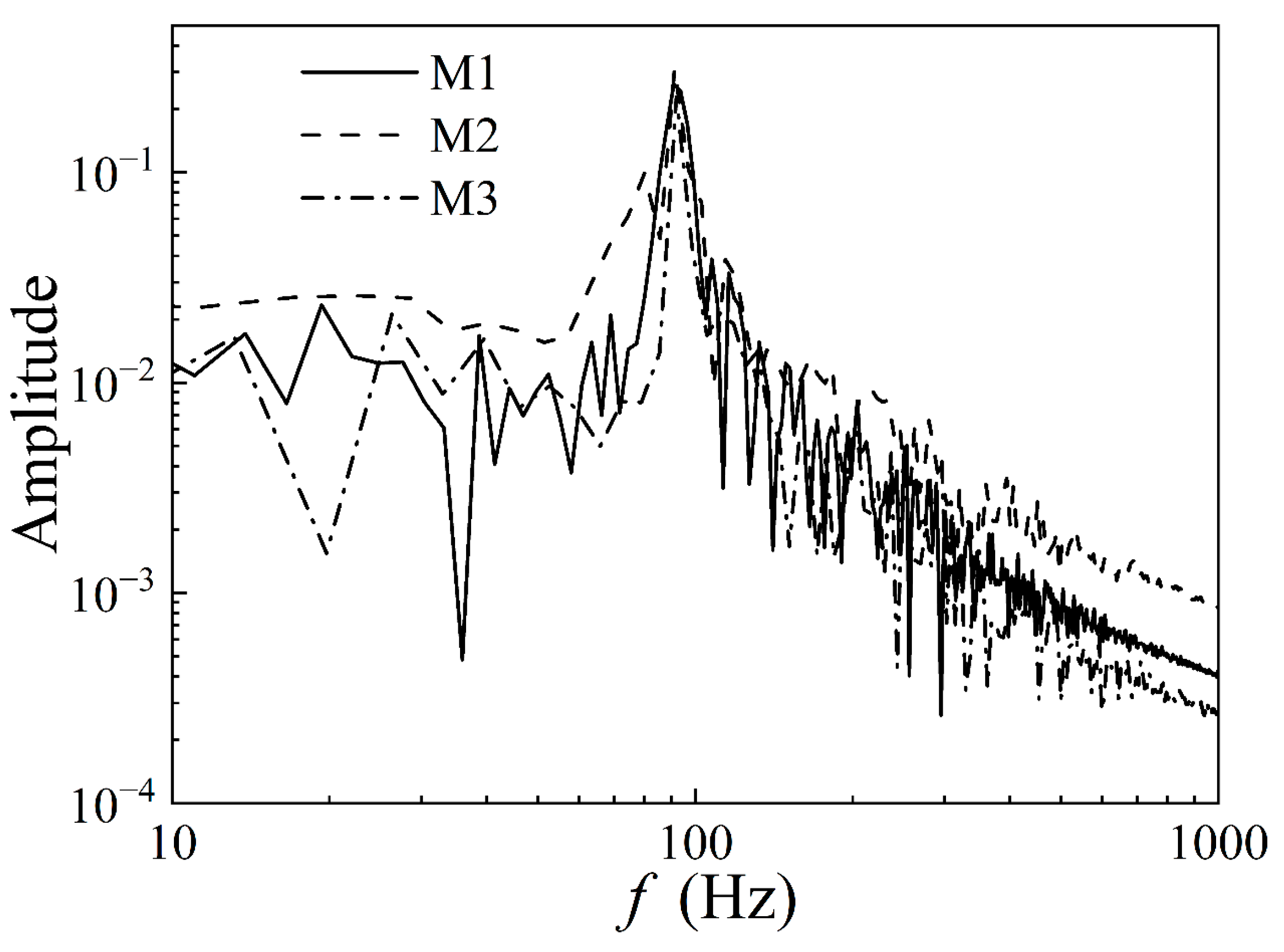
5.2. Verification and Validation of the Non-Cavitating Case
5.3. Assessment of the Compressible Cavitation Model
5.3.1. Pressure on the Wedge Surface
5.3.2. Unsteady Loads on the Wedge Surface
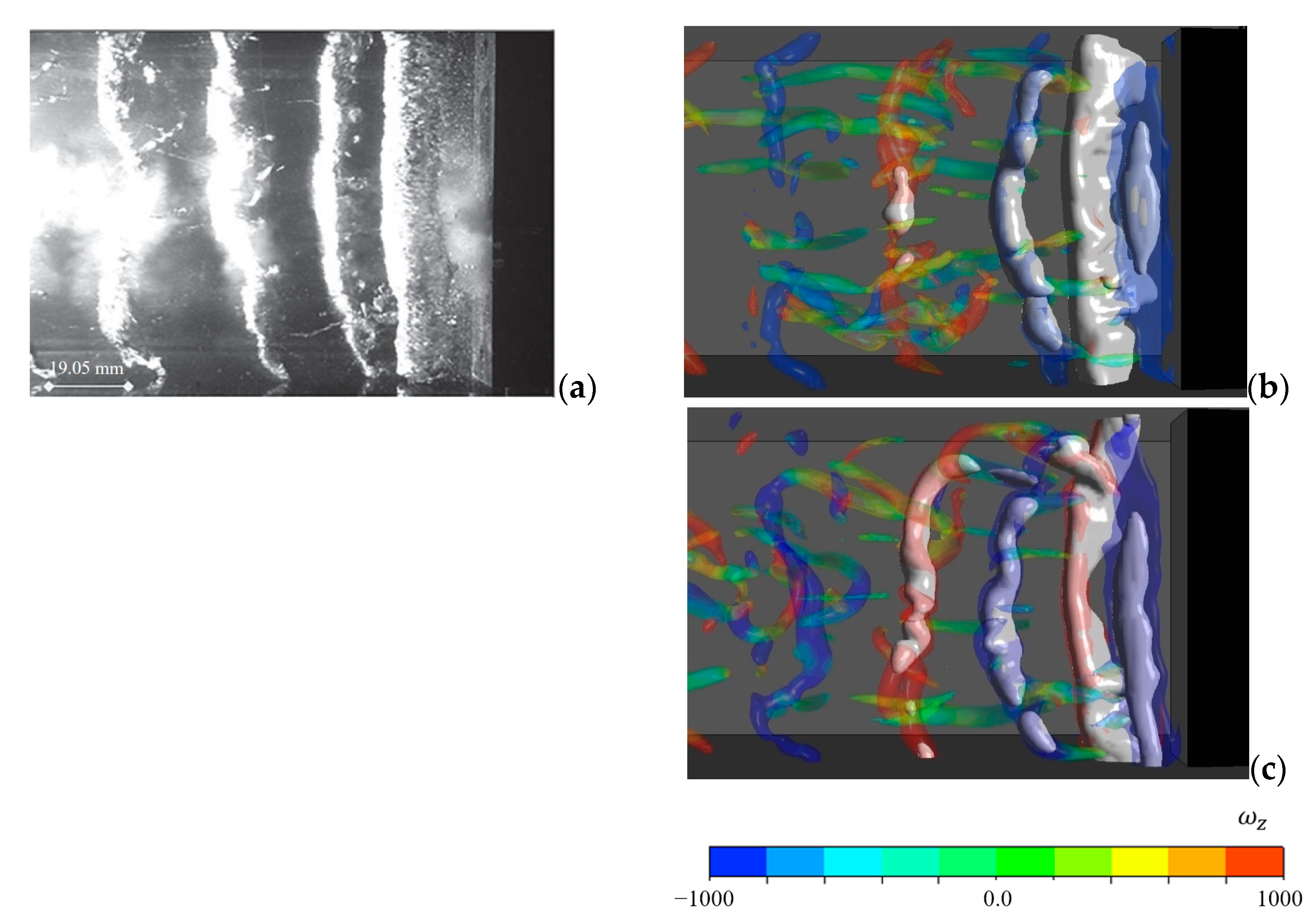
5.3.3. Cavitation Structures
6. Conclusions
- Both cavitation solvers provide similar results to the experimental ones in terms of mean pressure and hydrodynamic forces.
- Both cavitation solvers provide almost identical results of the dominant vortex shedding frequency and the instantaneous and mean void fraction fields.
- The spectral content of the simulated hydrodynamic forces is similar with both solvers for low frequencies, but, for higher frequencies, the amplitudes are larger and the content is better resolved with the compressible solver.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Arndt, R.E.A. Cavitation in Fluid Machinery and Hydraulic Structures. Annu. Rev. Fluid Mech. 1981, 13, 273–326. [Google Scholar] [CrossRef]
- Escaler, X.; Egusquiza, E.; Farhat, M.; Avellan, F.; Coussirat, M. Detection of Cavitation in Hydraulic Turbines. Mech. Syst. Signal Process. 2006, 20, 983–1007. [Google Scholar] [CrossRef]
- Gu, Y.; Sun, H.; Wang, C.; Lu, R.; Liu, B.; Ge, J. Effect of Trimmed Rear Shroud on Performance and Axial Thrust of Multi-Stage Centrifugal Pump with Emphasis on Visualizing Flow Losses. J. Fluids Eng. 2024, 146, 011204. [Google Scholar] [CrossRef]
- Franc, J.P.; Michel, J.M. Fundamentals of Cavitation; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Young, J.O.; Holl, J.W. Effects of Cavitation on Periodic Wakes behind Symmetric Wedges. J. Basic Eng. 1966, 88, 163–176. [Google Scholar] [CrossRef]
- Belahadji, B.; Franc, J.P.; Michel, J.M. Cavitation in the Rotational Structures of a Turbulent Wake. J. Fluid Mech. 1995, 287, 383–403. [Google Scholar] [CrossRef]
- Ausoni, P.; Farhat, M.; Escaler, X.; Egusquiza, E.; Avellan, F. Cavitation Influence on von Kármán Vortex Shedding and Induced Hydrofoil Vibrations. J. Fluids Eng. 2007, 129, 966–973. [Google Scholar] [CrossRef]
- Wu, J.; Deijlen, L.; Bhatt, A.; Ganesh, H.; Ceccio, S.L. Cavitation Dynamics and Vortex Shedding in the Wake of a Bluff Body. J. Fluid Mech. 2021, 917, A26. [Google Scholar] [CrossRef]
- Niedźwiedzka, A.; Schnerr, G.H.; Sobieski, W. Review of Numerical Models of Cavitating Flows with the Use of the Homogeneous Approach. Arch. Thermodyn. 2016, 37, 71–88. [Google Scholar] [CrossRef]
- Folden, T.S.; Aschmoneit, F.J. A Classification and Review of Cavitation Models with an Emphasis on Physical Aspects of Cavitation. Phys. Fluids 2023, 35, 081301. [Google Scholar] [CrossRef]
- Coutier-Delgosha, O.; Reboud, J.L.; Delannoy, Y. Numerical Simulation of the Unsteady Behaviour of Cavitating Flows. Int. J. Numer. Methods Fluids 2003, 42, 527–548. [Google Scholar] [CrossRef]
- Ji, B.; Luo, X.; Arndt, R.E.A.; Wu, Y. Numerical Simulation of Three Dimensional Cavitation Shedding Dynamics with Special Emphasis on Cavitation–Vortex Interaction. Ocean Eng. 2014, 87, 64–77. [Google Scholar] [CrossRef]
- Gnanaskandan, A.; Mahesh, K. Large Eddy Simulation of the Transition from Sheet to Cloud Cavitation over a Wedge. Int. J. Multiph. Flow 2016, 83, 86–102. [Google Scholar] [CrossRef]
- Callenaere, M.; Franc, J.P.; Michel, J.M.; Riondet, M. The Cavitation Instability Induced by the Development of a Re-Entrant Jet. J. Fluid Mech. 2001, 444, 223–256. [Google Scholar] [CrossRef]
- Kawanami, Y.; Kato, H.; Yamaguchi, H.; Tanimura, M.; Tagaya, Y. Mechanism and Control of Cloud Cavitation. J. Fluids Eng. 1997, 119, 778–794. [Google Scholar] [CrossRef]
- Laberteaux, K.R.; Ceccio, S.L. Partial Cavity Flows. Part 1. Cavities Forming on Models without Spanwise Variation. J. Fluid Mech. 2001, 431, 1–41. [Google Scholar] [CrossRef]
- Leroux, J.-B.; Astolfi, J.A.; Billard, J.Y. An Experimental Study of Unsteady Partial Cavitation. J. Fluids Eng. 2004, 126, 94–101. [Google Scholar] [CrossRef]
- Wu, J.; Ganesh, H.; Ceccio, S. Multimodal Partial Cavity Shedding on a Two-Dimensional Hydrofoil and Its Relation to the Presence of Bubbly Shocks. Exp. Fluids 2019, 60, 66. [Google Scholar] [CrossRef]
- Ganesh, H.; Mäkiharju, S.A.; Ceccio, S.L. Bubbly Shock Propagation as a Mechanism for Sheet-to-Cloud Transition of Partial Cavities. J. Fluid Mech. 2016, 802, 37–78. [Google Scholar] [CrossRef]
- Bhatt, A.; Ganesh, H.; Ceccio, S.L. Partial Cavity Shedding on a Hydrofoil Resulting from Re-Entrant Flow and Bubbly Shock Waves. J. Fluid Mech. 2023, 957, A28. [Google Scholar] [CrossRef]
- Gnanaskandan, A.; Mahesh, K. Numerical Investigation of Near-Wake Characteristics of Cavitating Flow over a Circular Cylinder. J. Fluid Mech. 2016, 790, 453–491. [Google Scholar] [CrossRef]
- Wang, C.; Wang, G.; Huang, B. Characteristics and Dynamics of Compressible Cavitating Flows with Special Emphasis on Compressibility Effects. Int. J. Multiph. Flow 2020, 130, 103357. [Google Scholar] [CrossRef]
- Vaca-Revelo, D.; Gnanaskandan, A. Numerical Assessment of the Condensation Shock Mechanism in Sheet to Cloud Cavitation Transition. Int. J. Multiph. Flow 2023, 169, 104616. [Google Scholar] [CrossRef]
- Katz, J. Cavitation Phenomena within Regions of Flow Separation. J. Fluid Mech. 1984, 140, 397–436. [Google Scholar] [CrossRef]
- O’Hern, T.J. An Experimental Investigation of Turbulent Shear Flow Cavitation. J. Fluid Mech. 1990, 215, 365–391. [Google Scholar] [CrossRef]
- Iyer, C.O.; Ceccio, S.L. The Influence of Developed Cavitation on the Flow of a Turbulent Shear Layer. Phys. Fluids 2002, 14, 3414–3431. [Google Scholar] [CrossRef]
- Choi, J.; Ceccio, S.L. Dynamics and Noise Emission of Vortex Cavitation Bubbles. J. Fluid Mech. 2007, 575, 1–26. [Google Scholar] [CrossRef]
- Agarwal, K.; Ram, O.; Lu, Y.; Katz, J. On the Pressure Field, Nuclei Dynamics and Their Relation to Cavitation Inception in a Turbulent Shear Layer. J. Fluid Mech. 2023, 966, A31. [Google Scholar] [CrossRef]
- Wang, Z.; Cheng, H.; Ji, B. Euler–Lagrange Study of Cavitating Turbulent Flow around a Hydrofoil. Phys. Fluids 2021, 33, 112108. [Google Scholar] [CrossRef]
- Wang, Z.; Cheng, H.; Ji, B.; Peng, X. Numerical Investigation of Inner Structure and Its Formation Mechanism of Cloud Cavitating Flow. Int. J. Multiph. Flow 2023, 165, 104484. [Google Scholar] [CrossRef]
- Brandao, F.L.; Bhatt, M.; Mahesh, K. Numerical Study of Cavitation Regimes in Flow over a Circular Cylinder. J. Fluid Mech. 2020, 885, A19. [Google Scholar] [CrossRef]
- Park, S.; Seok, W.; Park, S.T.; Rhee, S.H.; Choe, Y.; Kim, C.; Kim, J.H.; Ahn, B.K. Compressibility Effects on Cavity Dynamics behind a Two-Dimensional Wedge. J. Mar. Sci. Eng. 2020, 8, 39. [Google Scholar] [CrossRef]
- Wang, Z.; Cheng, H.; Bensow, R.E.; Ji, B. Numerical Evaluation of the Bubble Dynamic Influence on the Characteristics of Multiscale Cavitating Flow in the Bluff Body Wake. Int. J. Multiph. Flow 2024, 175, 104818. [Google Scholar] [CrossRef]
- Zwart, P.; Gerber, A.G.; Belamri, T. A Two-Phase Flow Model for Predicting Cavitation Dynamics. In Proceedings of the Fifth International Conference on Multiphase Flow, Yokohama, Japan, 30 May–4 June 2004. [Google Scholar]
- Egerer, C.P.; Schmidt, S.J.; Hickel, S.; Adams, N.A. Efficient Implicit LES Method for the Simulation of Turbulent Cavitating Flows. J. Comput. Phys. 2016, 316, 453–469. [Google Scholar] [CrossRef]
- Tong, S.-Y.; Zhang, S.; Wang, S.-P.; Li, S. Characteristics of the Bubble-Induced Pressure, Force, and Impulse on a Rigid Wall. Ocean Eng. 2022, 255, 111484. [Google Scholar] [CrossRef]
- Li, H.; Vasquez, S.A. Numerical Simulation of Steady and Unsteady Compressible Multiphase Flows. In Proceedings of the ASME 2012 International Mechanical Engineering Congress and Exposition, Houston, TX, USA, 9–15 November 2012; pp. 2239–2251. [Google Scholar]
- Brunhart, M.; Soteriou, C.; Gavaises, M.; Karathanassis, I.; Koukouvinis, P.; Jahangir, S.; Poelma, C. Investigation of Cavitation and Vapor Shedding Mechanisms in a Venturi Nozzle. Phys. Fluids 2020, 32, 083306. [Google Scholar] [CrossRef]
- Mani, A. Analysis and Optimization of Numerical Sponge Layers as a Nonreflective Boundary Treatment. J. Comput. Phys. 2012, 231, 704–716. [Google Scholar] [CrossRef]
- Schmidt, S.J. A Low Mach Number Consistent Compressible Approach for Simulation of Cavitating Flows. Ph.D. Thesis, Technical University of Munich, Munich, Germany, 2015. [Google Scholar]
- Braza, M.; Chassaing, P.; Minh, H.H. Numerical Study and Physical Analysis of the Pressure and Velocity Fields in the near Wake of a Circular Cylinder. J. Fluid Mech. 1986, 165, 79–130. [Google Scholar] [CrossRef]
- Ding, H.; Shu, C.; Yeo, K.S.; Xu, D. Numerical Simulation of Flows around Two Circular Cylinders by Mesh-Free Least Square-Based Finite Difference Methods. Int. J. Numer. Methods Fluids 2007, 53, 305–332. [Google Scholar] [CrossRef]
- Seo, J.H.; Moon, Y.J.; Shin, B.R. Prediction of Cavitating Flow Noise by Direct Numerical Simulation. J. Comput. Phys. 2008, 227, 6511–6531. [Google Scholar] [CrossRef]
- Harichandan, A.B.; Roy, A. Numerical Investigation of Flow Past Single and Tandem Cylindrical Bodies in the Vicinity of a Plane Wall. J. Fluids Struct. 2012, 33, 19–43. [Google Scholar] [CrossRef]
- Qu, L.; Norberg, C.; Davidson, L.; Peng, S.-H.; Wang, F. Quantitative Numerical Analysis of Flow Past a Circular Cylinder at Reynolds Number between 50 and 200. J. Fluids Struct. 2013, 39, 347–370. [Google Scholar] [CrossRef]
- Kim, K.H.; Choi, J.I. Lock-in Regions of Laminar Flows over a Streamwise Oscillating Circular Cylinder. J. Fluid Mech. 2019, 858, 315–351. [Google Scholar] [CrossRef]
- Hong, S.; Son, G. Numerical Simulation of Cavitating Flows around an Oscillating Circular Cylinder. Ocean Eng. 2021, 226, 108739. [Google Scholar] [CrossRef]
- Menter, F.R. Best Practice: Scale-Resolving Simulations in ANSYS CFD; ANSYS Germany GmbH: Darmstadt, Germany, 2015. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Braza et al. [41] | 1.40 | 0.75 | 0.20 |
| Ding et al. [42] | 1.35 | 0.66 | 0.196 |
| Seo et al. [43] | 1.08 | 0.60 | 0.19 |
| Harichandan and Roy [44] | 1.32 | 0.60 | 0.194 |
| Qu et al. [45] | 1.32 | 0.66 | 0.196 |
| Gnanaskandan et al. [21] | - | - | 0.198 |
| Kim and Choi [46] | 1.35 | 0.70 | 0.197 |
| Hong and Son [47] | 1.32 | 0.66 | 0.194 |
| Current simulation | 1.32 | 0.65 | 0.194 |
| Seo et al. [43] | 1.08 | 0.42 | 0.16 |
| Gnanaskandan and Mahesh [21] | 1.10 | 0.56 | 0.16 |
| Hong and Son [47] | - | - | 0.177 |
| Current simulation | 1.22 | 0.30 | 0.17 |
| Name | Number of Cells | D/Δx |
|---|---|---|
| M1 | 1.39 × 106 | 20 |
| M2 | 2.75 × 106 | 26 |
| M3 | 4.13 × 106 | 30 |
| σ | Inlet Boundary | Value | Outlet Boundary | Value | Top Wall | Bottom Wall | Other Walls |
|---|---|---|---|---|---|---|---|
| Non-cavitation | Fixed velocity | 6 m/s | Outlet | - | FSW | FSW | NSW |
| 1.9 | Total pressure | 54,540 Pa | Mass flowrate | 34.66 kg/s | FSW | FSW | NSW |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Geng, L.; Jou, E.; Escaler, X. Comparative Performance Assessment between Incompressible and Compressible Solvers to Simulate a Cavitating Wake. Fluids 2024, 9, 218. https://doi.org/10.3390/fluids9090218
Chen J, Geng L, Jou E, Escaler X. Comparative Performance Assessment between Incompressible and Compressible Solvers to Simulate a Cavitating Wake. Fluids. 2024; 9(9):218. https://doi.org/10.3390/fluids9090218
Chicago/Turabian StyleChen, Jian, Linlin Geng, Esteve Jou, and Xavier Escaler. 2024. "Comparative Performance Assessment between Incompressible and Compressible Solvers to Simulate a Cavitating Wake" Fluids 9, no. 9: 218. https://doi.org/10.3390/fluids9090218
APA StyleChen, J., Geng, L., Jou, E., & Escaler, X. (2024). Comparative Performance Assessment between Incompressible and Compressible Solvers to Simulate a Cavitating Wake. Fluids, 9(9), 218. https://doi.org/10.3390/fluids9090218