

Numerical Analysis Related to the ROCOM Pressurized Thermal Shock Benchmark



Abstract
1. Introduction
2. ROCOM Test Facility
3. Instrumentation
4. Pressurized Thermal Shock (PTS) Experiments
5. Numerical Modeling with ANSYS CFX
5.1. Input Deck


5.2. Geometry
5.3. Grid Generation
6. Initial and Boundary Conditions
7. Results of the PTS1 Experiment
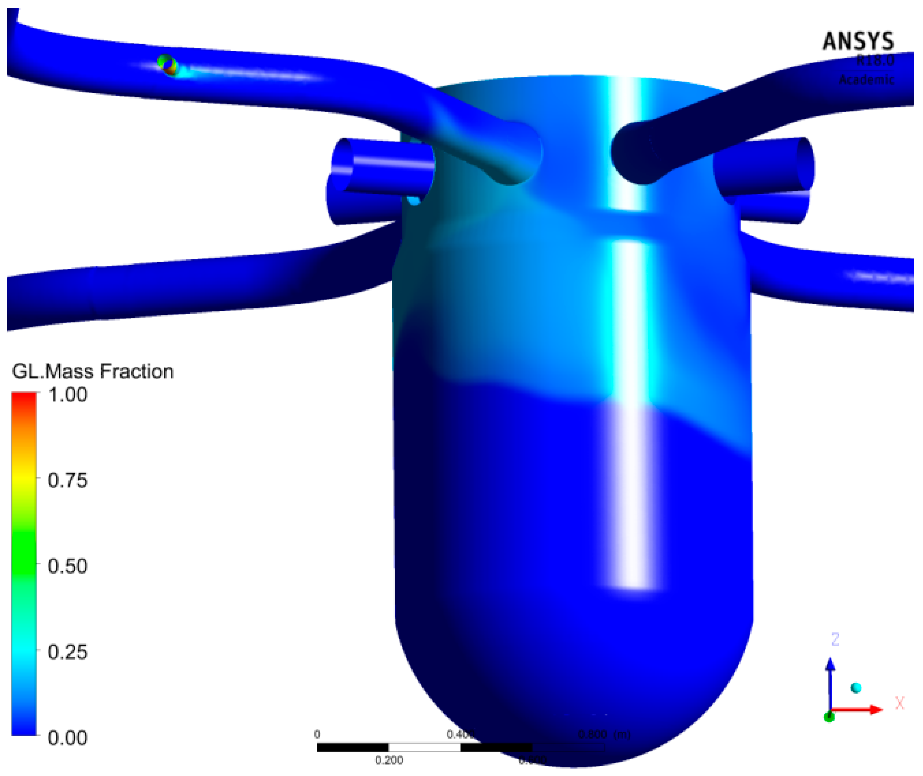
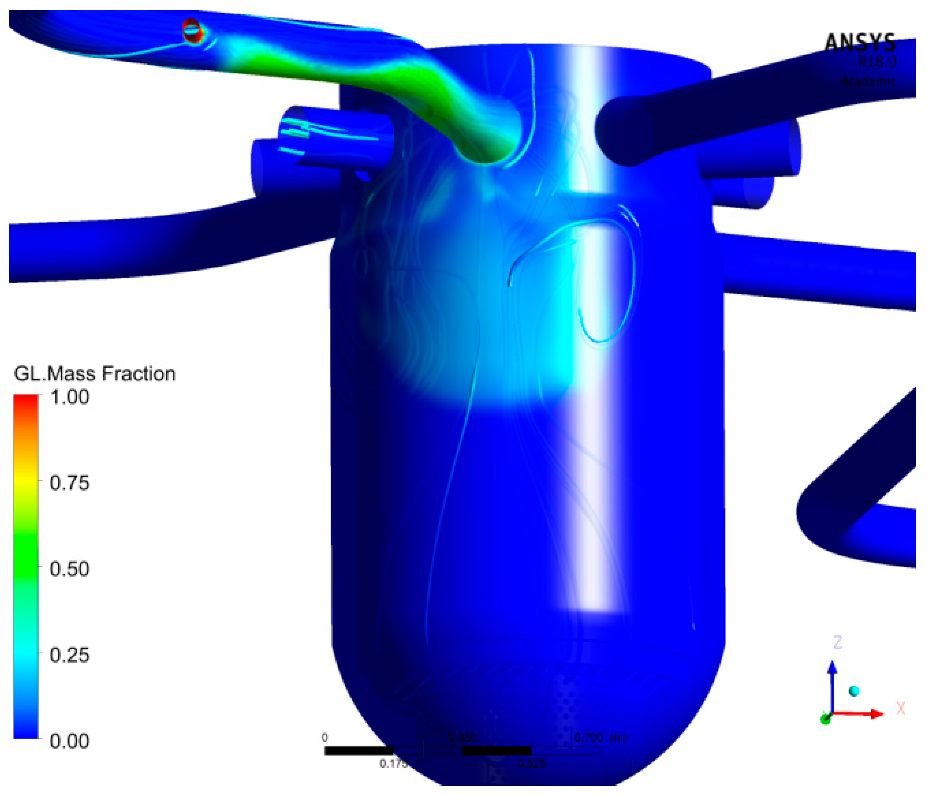
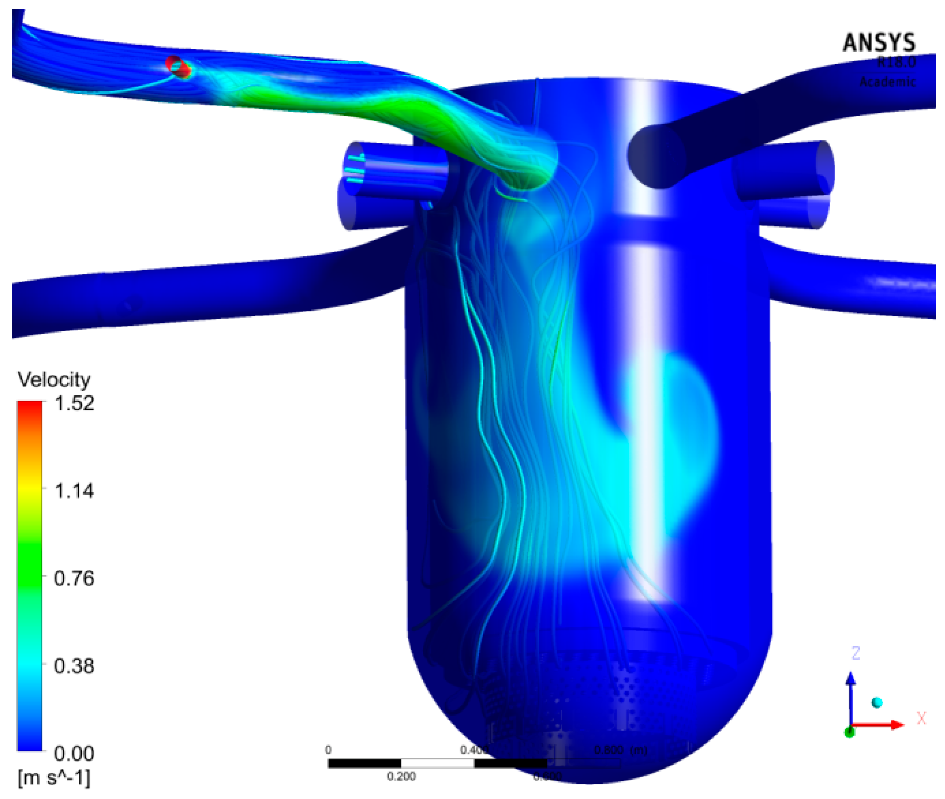
7.1. Qualitative Results
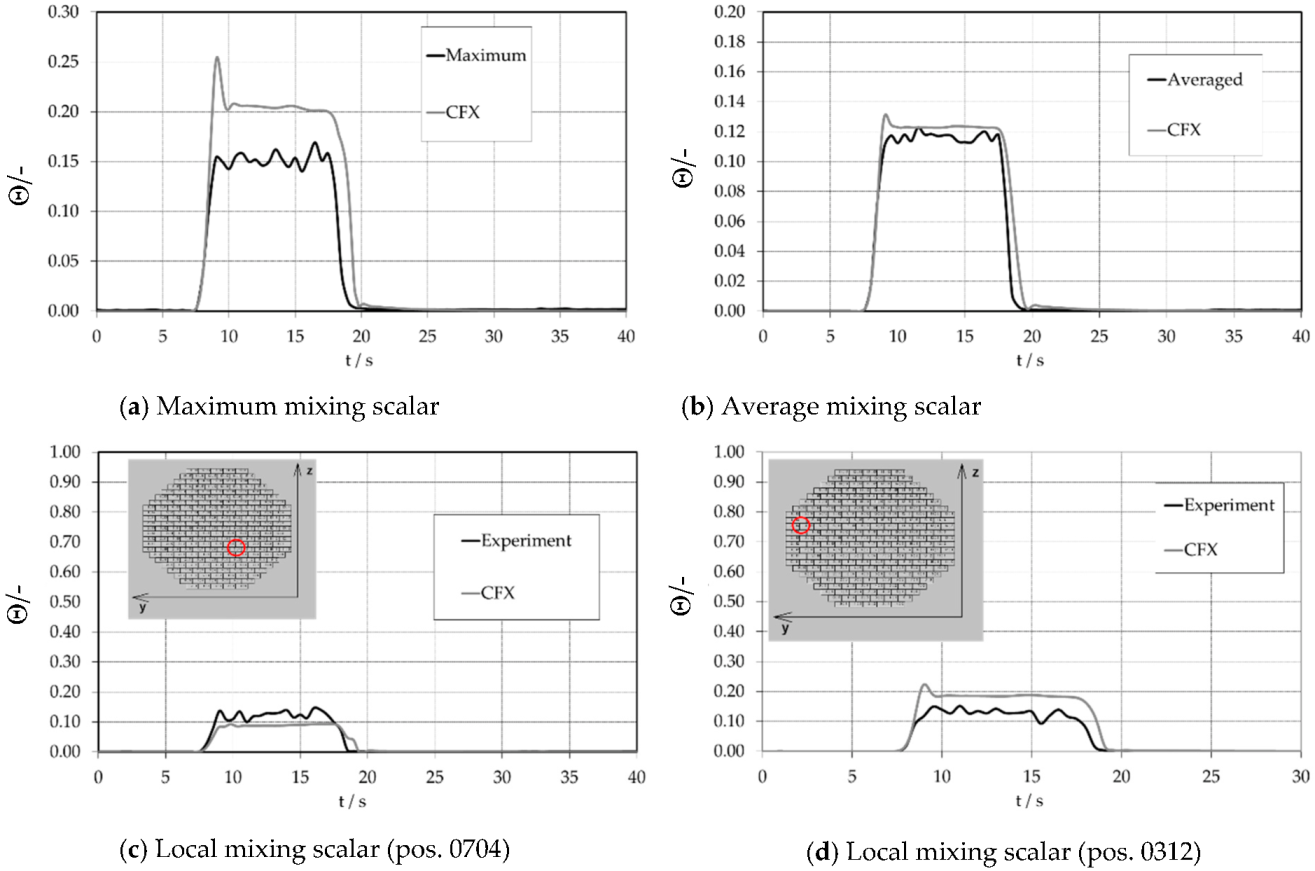
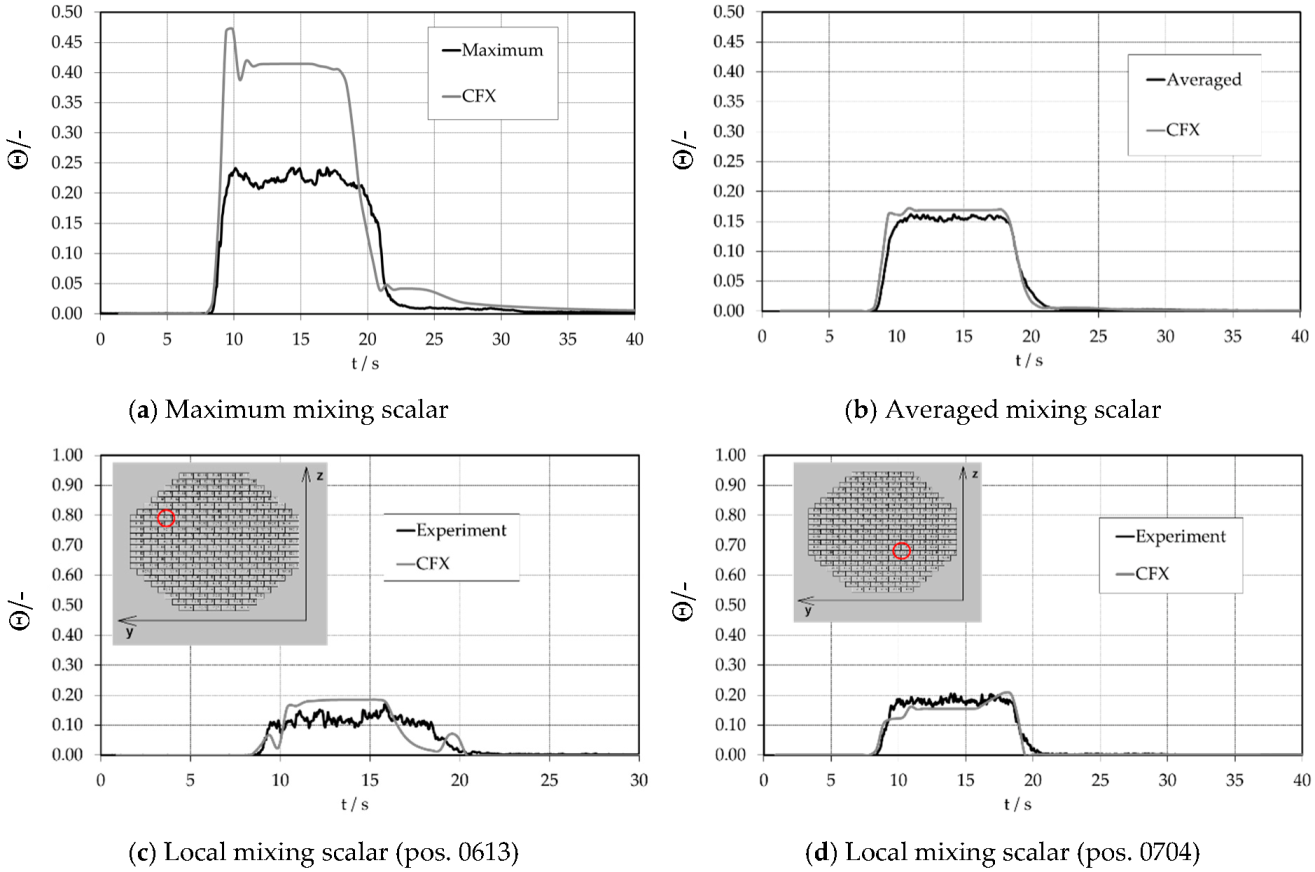
7.2. Quantitative Computational Results
- (a)
- Cold leg 1 sensor analysis
- (b)
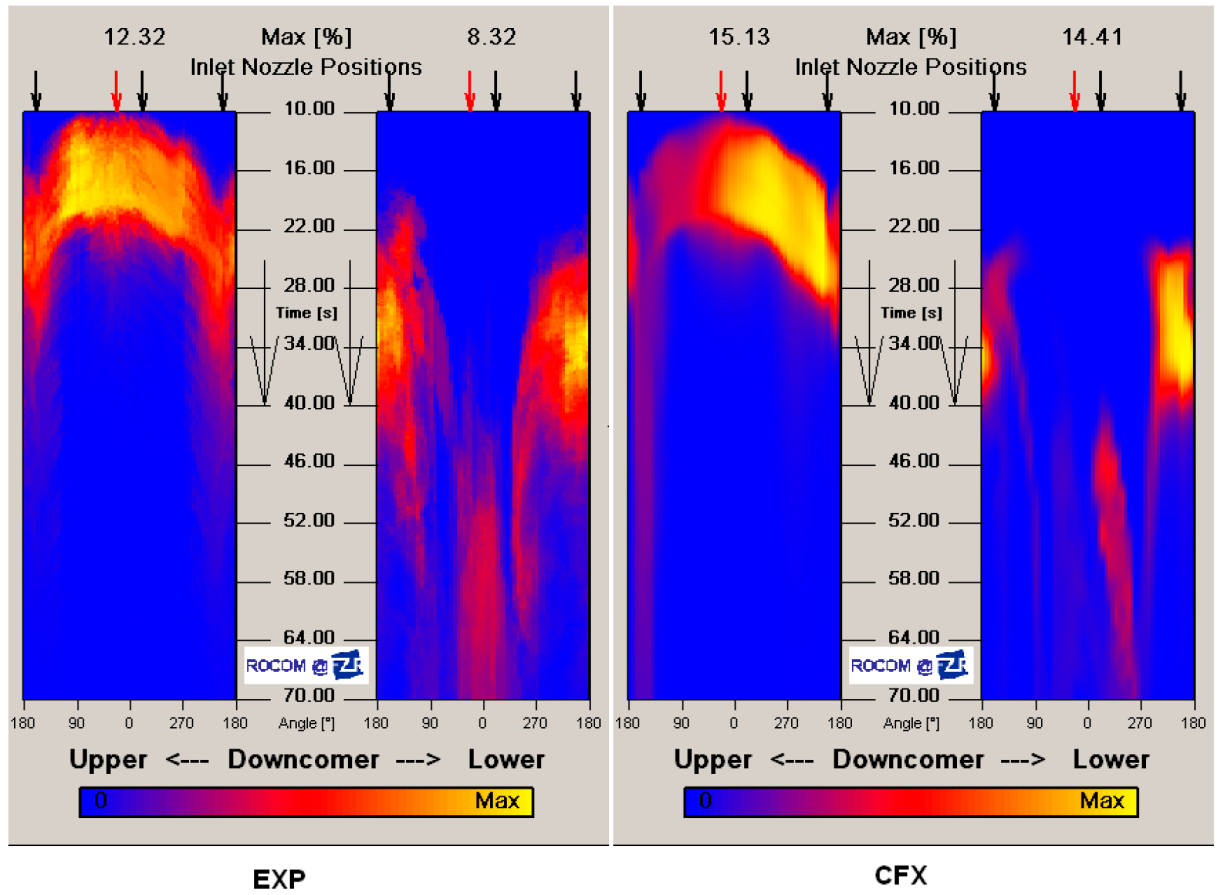
- Upper downcomer sensor plane analysis
- (c)
- Lower downcomer sensor analysis
8. Results of the PTS2 Experiment
8.1. Qualitative Numerical Analysis
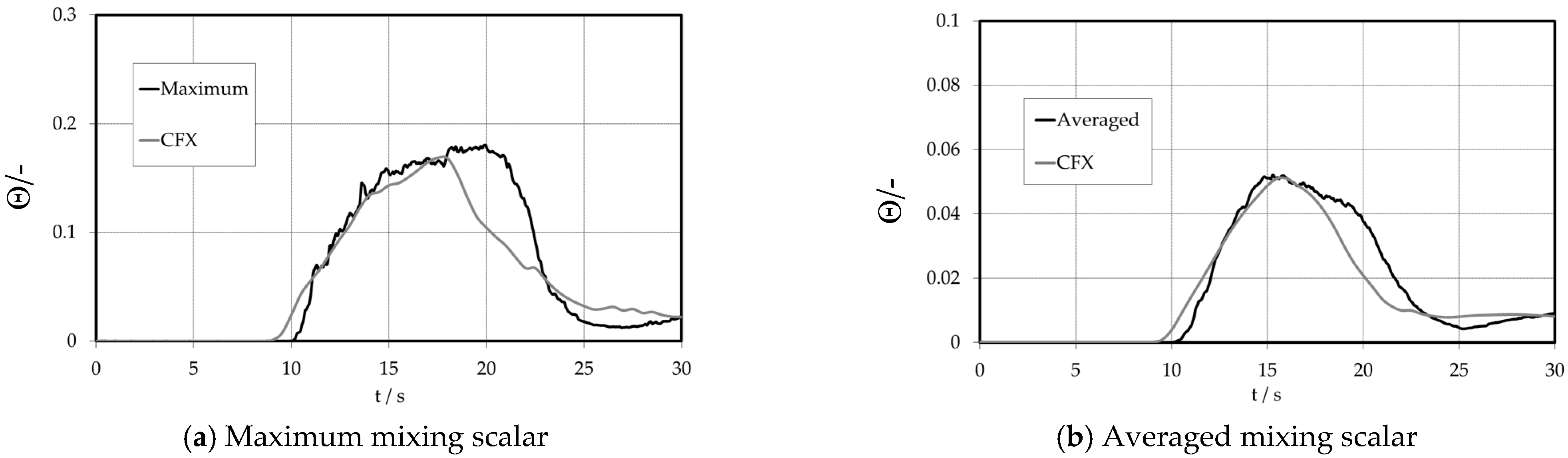
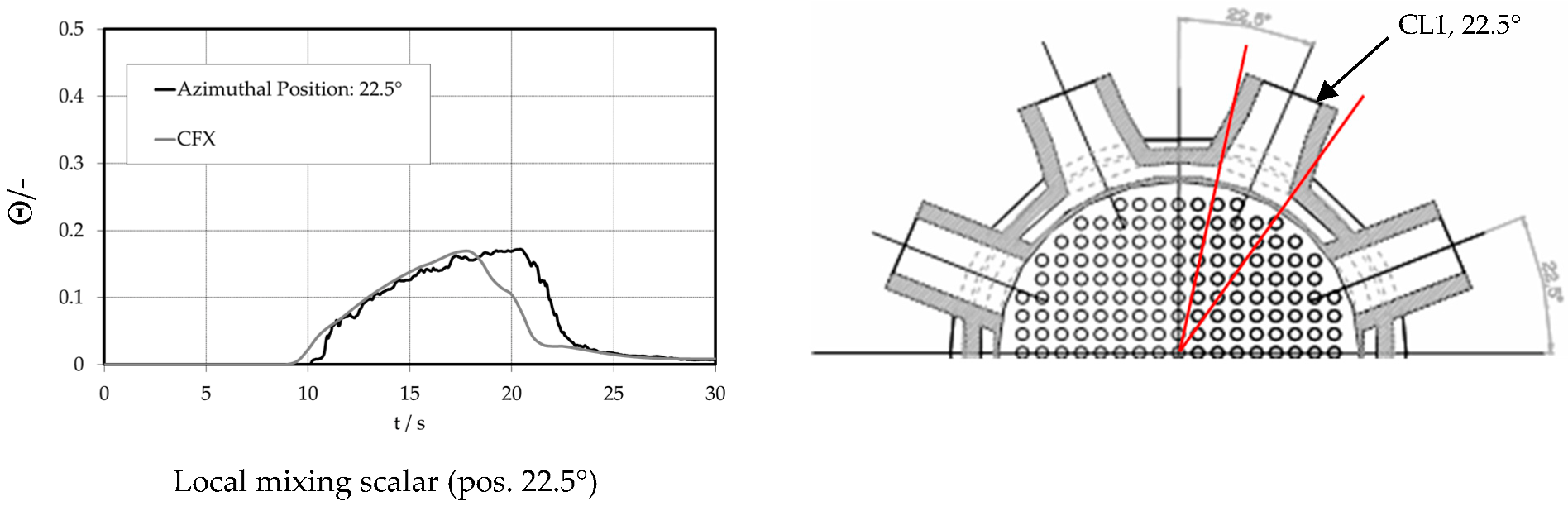
8.2. Quantitative Computational Results
- a.
- Analysis of the flow at the sensor within cold leg 1
- b.
- Upper downcomer sensor analysis
- c.
- Analysis of the flow at the lower downcomer sensor
9. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Latin Letters | ||
| Unit | Description | |
| a | - | constant |
| A | m2 | surface area |
| c | m/s | fluid velocity |
| C | - | constant |
| D | m2/s | diffusion coefficient |
| d | m | diameter |
| Fr | Froude number | |
| g | m/s2 | acceleration due to gravity |
| G | buoyancy production term | |
| j | - | run variable |
| kgm/s | turbulent kinetic energy | |
| l | m | length |
| m | kg | mass |
| kg/s | mass flow | |
| n | - | maximum value of the running variable |
| N | - | number of realizations |
| p | N/m2 | pressure |
| - | turbulence production | |
| Sij | - | principal stress tensor |
| t | s | time |
| K | temperature | |
| u, U | m/s | fluid velocity |
| m/s | average fluid velocity | |
| m3/s | flow rate | |
| x | m | coordinate in main flow direction |
| m | location coordinate | |
| y | m | wall distance |
| Greek Letters | ||
| Unit | Description | |
| N/m2 | shear stresses | |
| m2/s3 | dissipation rate | |
| Θ | - | dimensionless mixing scalar |
| μ | kg/ms | dynamic fluid viscosity |
| eddy viscosity | ||
| kinematic viscosity | ||
| pressure scrambling effect | ||
| density of the fluid | ||
| σ | µS/cm | conductivity |
| τ | N/m2 | shear stress |
| N/m2 | Reynolds stress tensor | |
| ϕ | N/m2 | pressure strain |
| s−1 | dissipation rate of k | |
| Indices | ||
| 0 | index for the unaffected coolant | |
| 1 | index for the disturbed loop | |
| t | index for time | |
| x | index for the x coordinate | |
| y | index for the y coordinate | |
| z | index for the z coordinate | |
| Abbreviations | ||
| BPG | Best Practise Guidelines | |
| BSL | Baseline | |
| CAD | Computer Aided Design | |
| CFD | Computational Fluid Dynamics | |
| CFX | Commercial Computational Fluid Dynamics Code | |
| CPU | Central Processing Unit | |
| ECC | Emergency Core Cooling (System) | |
| EXP | Experiment | |
| GPU | Graphical Processor Unit | |
| HZDR | Helmholtz-Zentrum Dresden-Rossendorf | |
| IAEA | International Atomic Energy Agency | |
| NPP | Nuclear Power Plant | |
| PTS | Pressurized Thermal Shock | |
| ROCOM | Rossendorf Coolant Mixing Test Facility | |
| RPV | Reactor Pressure Vessel | |
| RSM | Reynolds Stress Model, Root Mean Square | |
| WMS | Wire Mesh Sensor | |
References
- Prasser, H.-M.; Grunwald, G.; Höhne, T.; Kliem, S.; Rohde, U.; Weiss, F.-P. Coolant mixing in a PWR-deboration transients, steam line breaks and emergency core cooling injection—Experiments and analyses. Nucl. Technol. 2003, 143, 37–56. [Google Scholar] [CrossRef]
- Kliem, S.; Sühnel, T.; Rohde, U.; Höhne, T.; Prasser, H.-M.; Weiss, F.-P. Experiments at the mixing test facility ROCOM for benchmarking of CFD-codes. Nucl. Eng. Design 2008, 238, 566–576. [Google Scholar] [CrossRef]
- Kliem, S.; Prasser, H.-M.; Sühnel, T.; Weiss, F.-P.; Hansen, A. Experimental determination of the boron concentration distribution in the primary circuit of a PWR after a postulated cold leg small break loss-of-coolant:accident with cold leg safety injection. Nucl. Eng. Des. 2008, 238, 1788–1801. [Google Scholar] [CrossRef]
- Höhne, T.; Kliem, S. Modeling of a buoyancy-driven flow experiment in pressurized water reactors using CFD-methods. Nucl. Eng. Technol. 2007, 39, 327–336. [Google Scholar] [CrossRef]
- Cartland Glover, G.; Höhne, T.; Kliem, S.; Rohde, U.; Weiss, F.-P.; Prasser, H.-M. Hydrodynamic phenomena in the downcomer during flow rate transients in the primary circuit of a PWR. Nucl. Eng. Des. 2007, 237, 732–748. [Google Scholar] [CrossRef]
- Bucalossi, A.; Moretti, F.; Melideo, D.; Del Nevo, A.; D’Auria, F.; Höhne, T.; Lisenkov, E.; Gallori, D. Experimental investigation of in-vessel mixing phenomena in a VVER-1000 scaled test facility during unsteady asymmetric transients. Nucl. Eng. Des. 2011, 241, 3068–3075. [Google Scholar] [CrossRef]
- Farkas, I.; Hutli, E.; Farkas, T.; Takács, A.; Guba, A.; Tóth, I. Validation of Computational Fluid Dynamics Calculation Using Rossendorf Coolant Mixing Model Flow Measurements in Primary Loop of Coolant in a Pressurized Water Reactor Model. Nucl. Eng. Technol. 2016, 48, 941–951. [Google Scholar] [CrossRef]
- Jayaraju, S.T.; Sathiah, P.; Komen, E.; Baglietto, E. Large Eddy simulation for an inherent boron dilution transient. Nucl. Eng. Des. 2013, 262, 484–498. [Google Scholar] [CrossRef]
- Da Silva, M.J.; Thiele, S.; Höhne, T.; Vaibar, R.; Hampel, U. Experimental studies and CFD calculations for buoyancy driven mixing phenomena. Nucl. Eng. Des. 2010, 240, 2185–2193. [Google Scholar] [CrossRef]
- Petrov, V.; Manera, A. Effect of pump-induced cold-leg swirls on the flow field in the RPV of the EPRTM: CFD investigations and comparison with experimental results. Nucl. Eng. Des. 2011, 241, 1478–1485. [Google Scholar] [CrossRef]
- Rohde, U.; Kliem, S.; Höhne, T.; Karlsson, R.; Hemström, B.; Lillington, J.; Toppila, T.; Elter, J.; Bezrukov, Y. Fluid mixing and flow distribution in the reactor circuit: Measurement data base. Nucl. Eng. Des. 2005, 235, 421–443. [Google Scholar] [CrossRef]
- Höhne, T.; Kliem, S. IAEA CRP benchmark of ROCOM boron dilution and PTS test cases for the use of CFD in reactor design, Computational Fluid Dynamics for Nuclear Reactor Safety Applications–CFD4NRS-6. Nucl. Eng. Des. 2016, 333, 161–180. [Google Scholar] [CrossRef]
- Prasser, H.-M.; Böttger, A.; Zschau, J. A new Electrode-Mesh Tomograph for Gas-Liquid Flows. In Flow Measurement and Instrumentation; Elsevier: Amsterdam, The Netherlands, 1998; Volume 9, pp. 111–119. [Google Scholar]
- Höhne, T.; Kliem, S.; Vaibar, R. Experimental and numerical modeling of transition matrix from momentum to buoyancy-driven flow in a pressurized water reactor. J. Eng. Gas Turbines Power Trans. ASME 2009, 131, 012906. [Google Scholar] [CrossRef]
- ANSYS CFX 19.0 Documentation. In ANSYS CFX-Theory Guide; Ansys, Inc.: Canonsburg, PA, USA, 2019.
- Mahaffy, J.; Chung, B.; Song, C.; Dubois, F.; Graffard, E.; Ducros, F.; Heitsch, M.; Scheuerer, M.; Henriksson, M.; Komen, E.; et al. Best Practice Guidelines for the Use of CFD in Nuclear Reactor Safety Applications-Revision; Organization for Economic Co-Operation and Development: Paris, France, 2015. [Google Scholar]
- Launder, B.; Reece, G.; Rodi, W. Progress in the Development of a Reynolds Stress Turbulence Closure. J. Fluid Mech. 1975, 68, 537–566. [Google Scholar] [CrossRef]
- Hanjalič, K. One-point closure models for buoyancy driven turbulent flows. Fluid Mech. 2002, 34, 321–347. [Google Scholar] [CrossRef]
- Carteciano, L.N.; Weinberg, D.; Müller, U. Development and analysis of a turbulence model for buoyant flows. In Proceedings of the 4th World Conference on Experimental Heat Transfer, Fluid Mechanics and Thermodynamics, Brussels, Belgium, 2–6 June 1997. [Google Scholar]
- Huang, M.; Höhne, T. Numerical simulation of multicomponent flows with the presence of density gradients for the upgrading of advanced turbulence models. Nucl. Eng. Des. 2019, 344, 28–37. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (ECC) [m3/h] | (Loop 1) [m3/h] | Density Ratio loop 1:ECC Water | Fr in the Downcomer | |
|---|---|---|---|---|
| PTS1 | 3.6 | 27.75 | 1:1.0 | ∞ |
| PTS2 | 3.6 | 18.5 | 1:1.1 | 0.82 |
| Advection Scheme | High Resolution |
|---|---|
| Transient | 2nd Order Backward Euler 0.01 s |
| Convergence | Coefficient loops 4/30 |
| Convergence criteria | RMS 10−4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Höhne, T.; Kliem, S. Numerical Analysis Related to the ROCOM Pressurized Thermal Shock Benchmark. Fluids 2023, 8, 4. https://doi.org/10.3390/fluids8010004
Höhne T, Kliem S. Numerical Analysis Related to the ROCOM Pressurized Thermal Shock Benchmark. Fluids. 2023; 8(1):4. https://doi.org/10.3390/fluids8010004
Chicago/Turabian StyleHöhne, Thomas, and Sören Kliem. 2023. "Numerical Analysis Related to the ROCOM Pressurized Thermal Shock Benchmark" Fluids 8, no. 1: 4. https://doi.org/10.3390/fluids8010004
APA StyleHöhne, T., & Kliem, S. (2023). Numerical Analysis Related to the ROCOM Pressurized Thermal Shock Benchmark. Fluids, 8(1), 4. https://doi.org/10.3390/fluids8010004