
A 3D CFD-Based Workflow for Analyses of a Wide Range of Flow and Heat Transfer Conditions in Air Gaps of Electric Machines



Abstract
:1. Introduction
2. Materials and Methods
2.1. Air-Gap Geometry, Flow and Heat Transfer Parameters
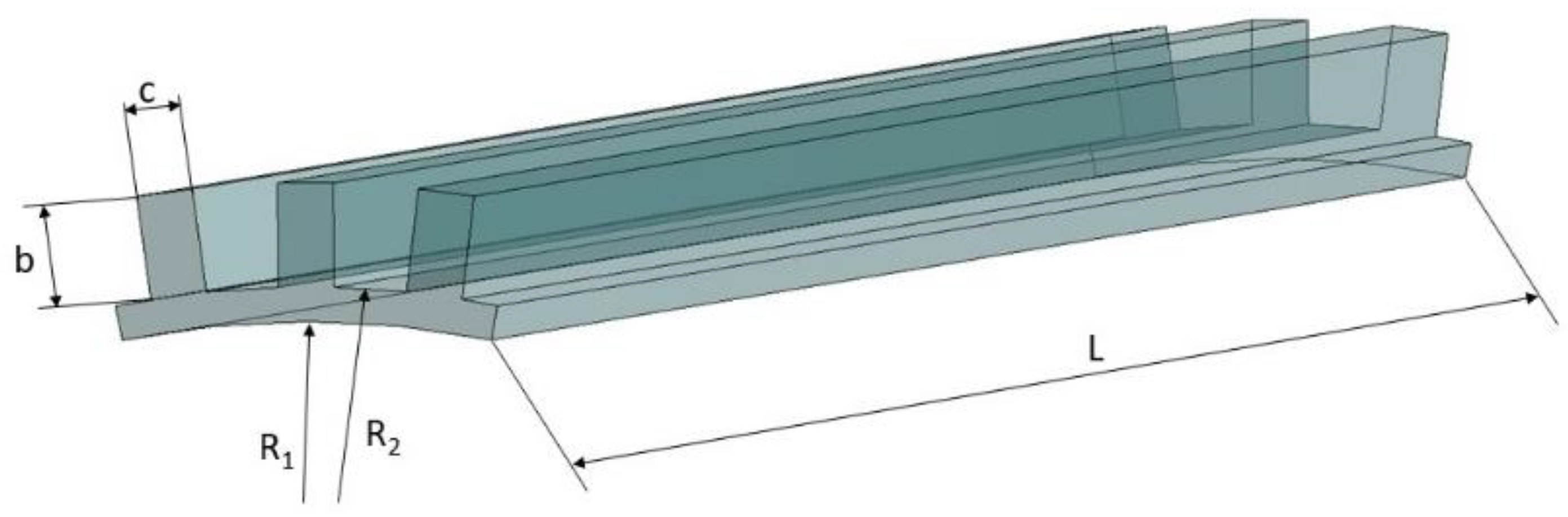
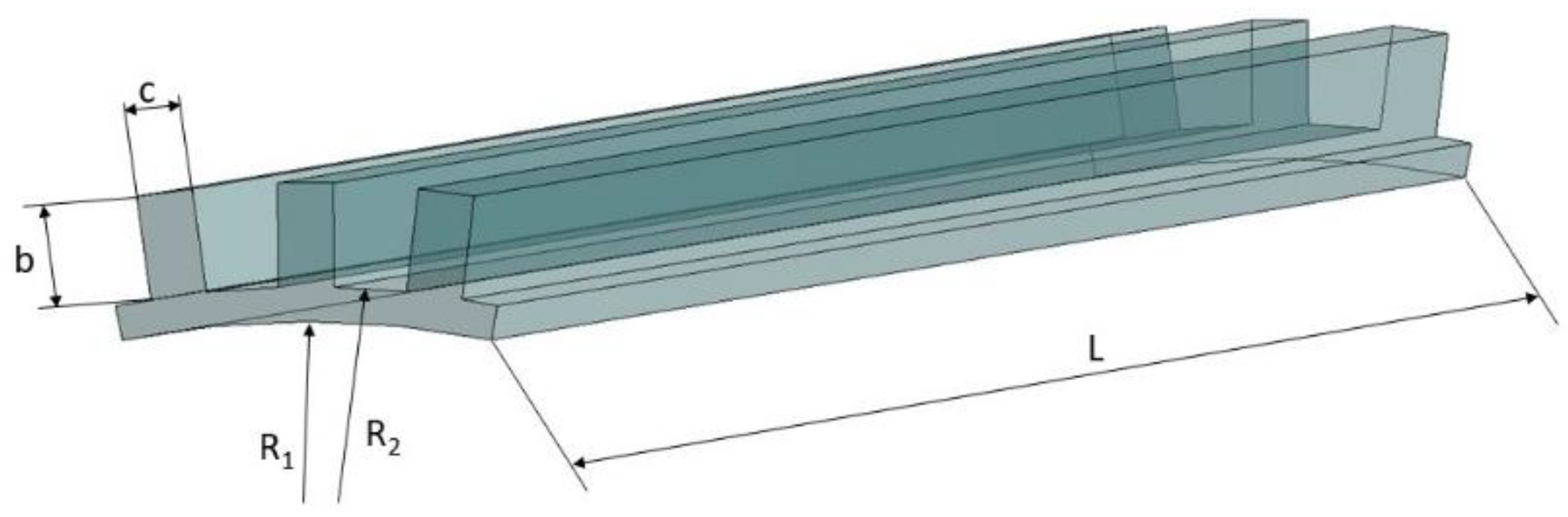
2.1.1. Geometry Parameters
2.1.2. Flow Parameters
2.1.3. Heat Transfer Parameters
2.2. The Variability of the Flow and Heat Transfer Phenomena in an Air Gap
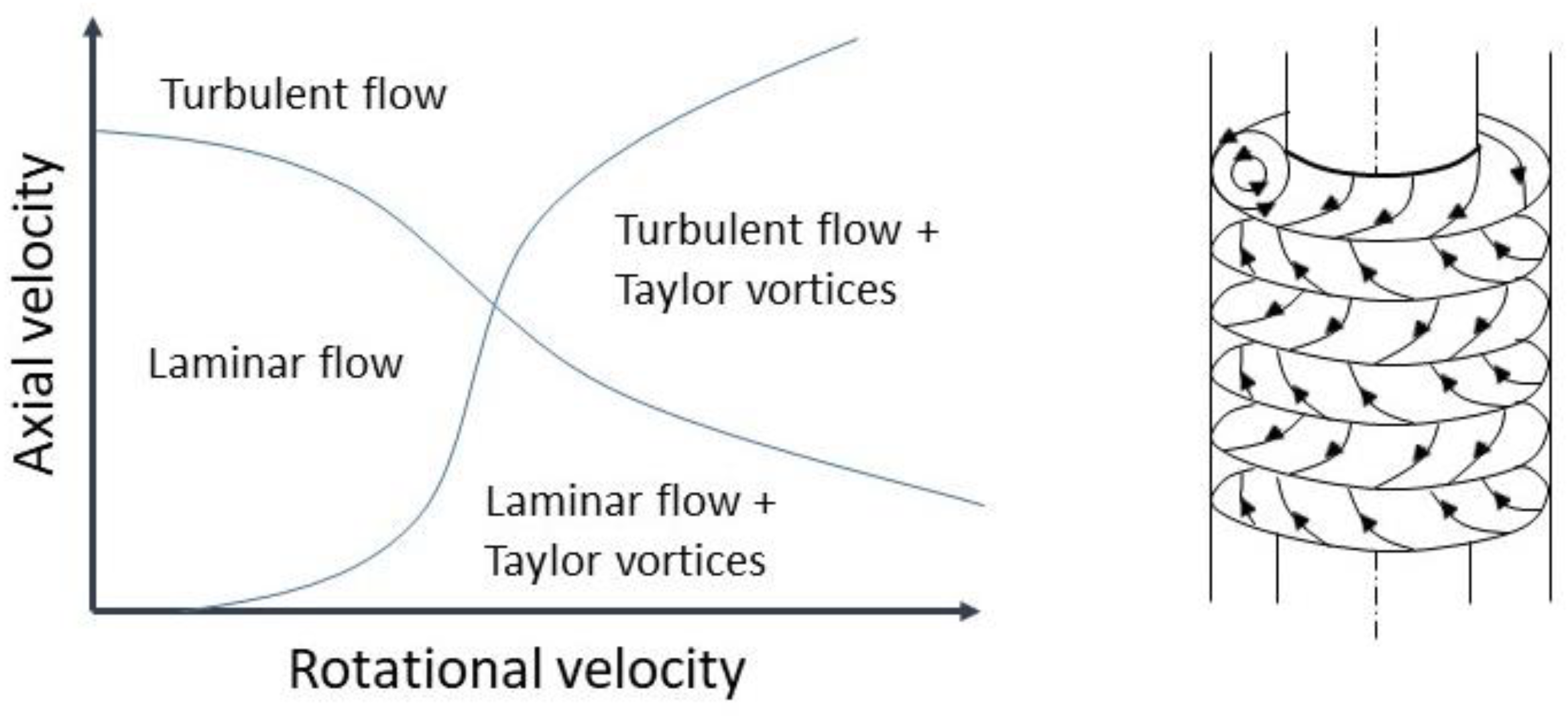
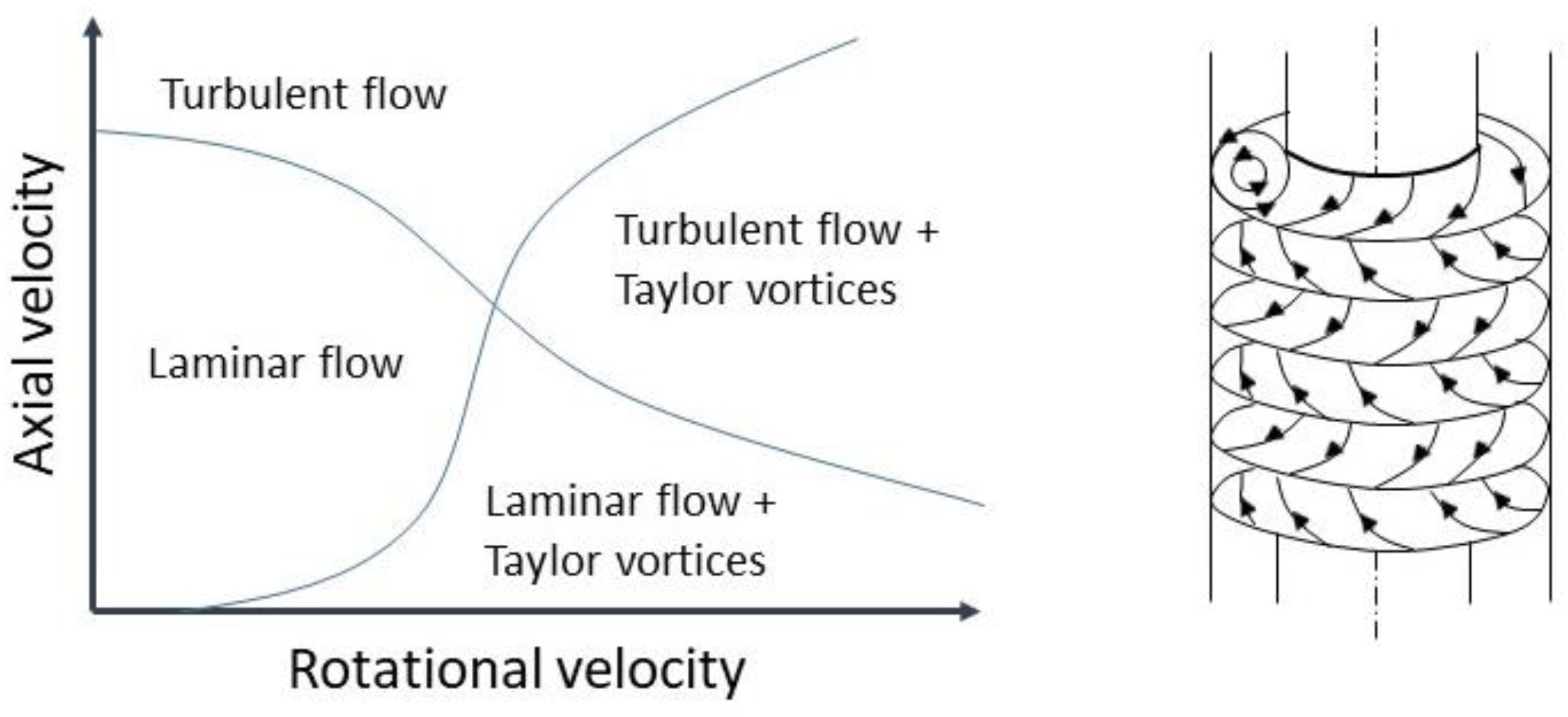
2.2.1. Flow Phenomena and Their Impact on Heat Transfer in Developed Air-Gap Flows
2.2.2. Flow Phenomena and Their Impact on Heat Transfer in Undeveloped Air-Gap Flows
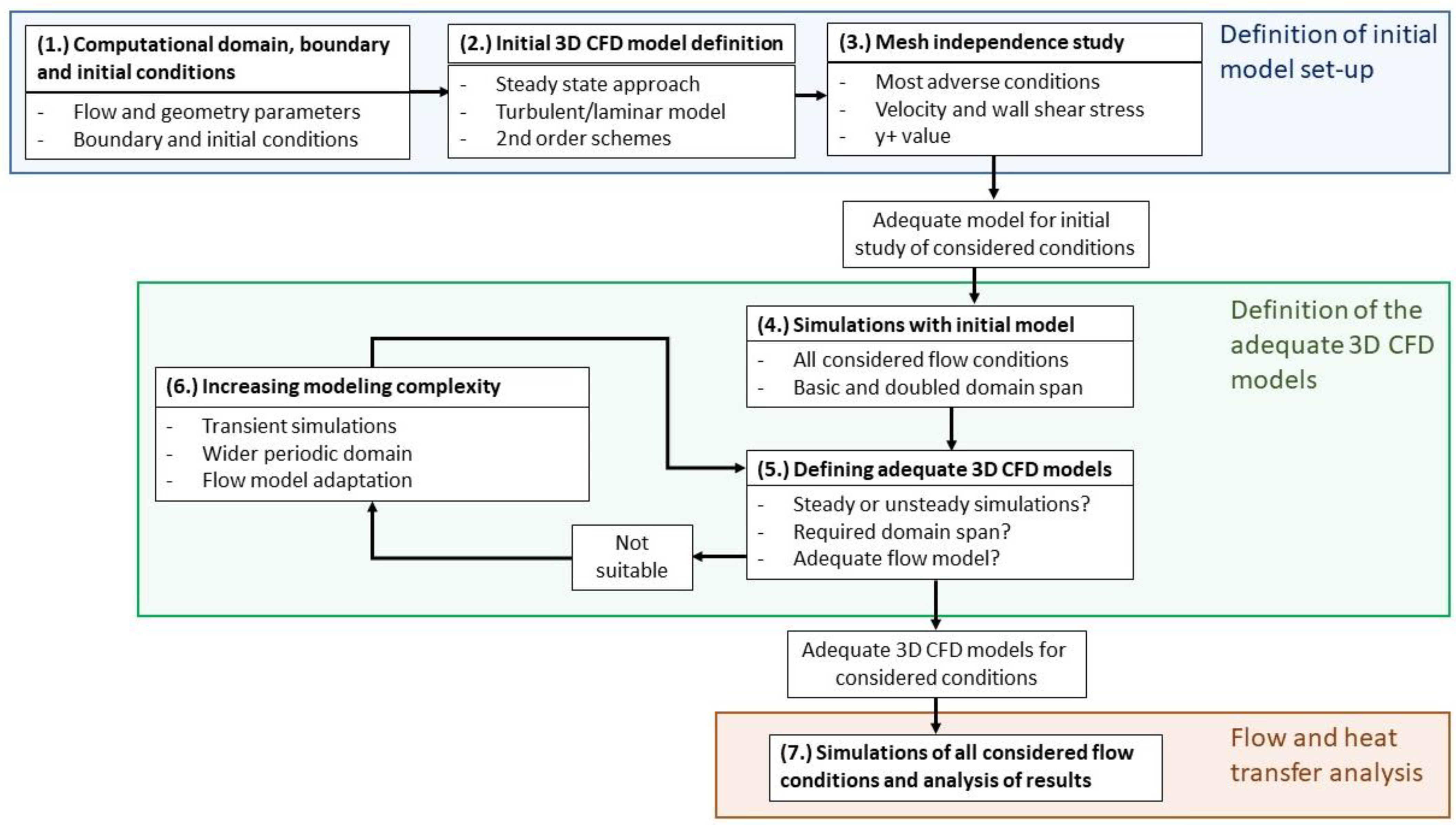
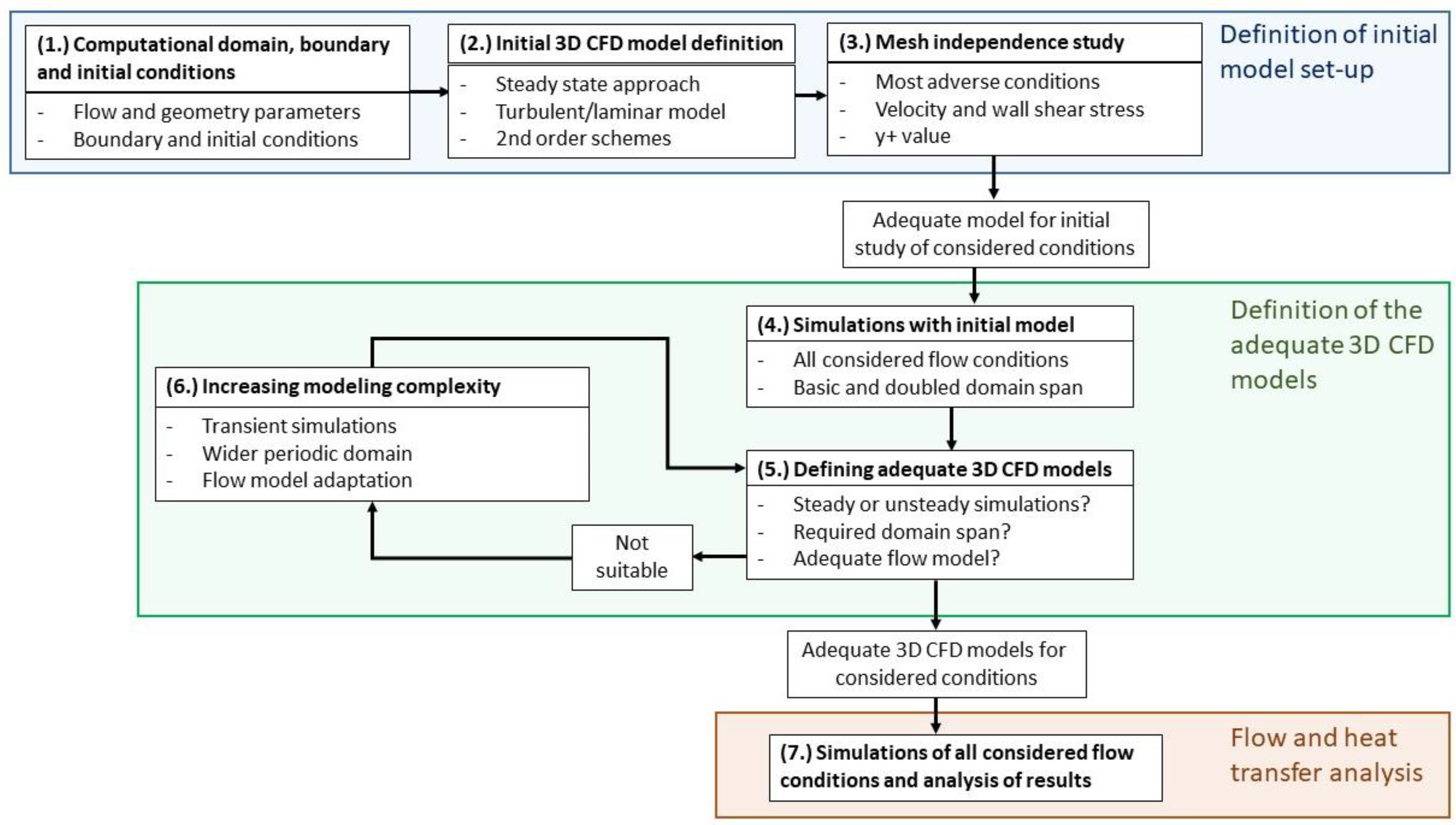
2.3. The Workflow for Definition of Adequate 3D CFD Models
- (1)
- Is there turbulent or laminar flow present?
- (2)
- Is the flow at observed operating conditions steady?
- (3)
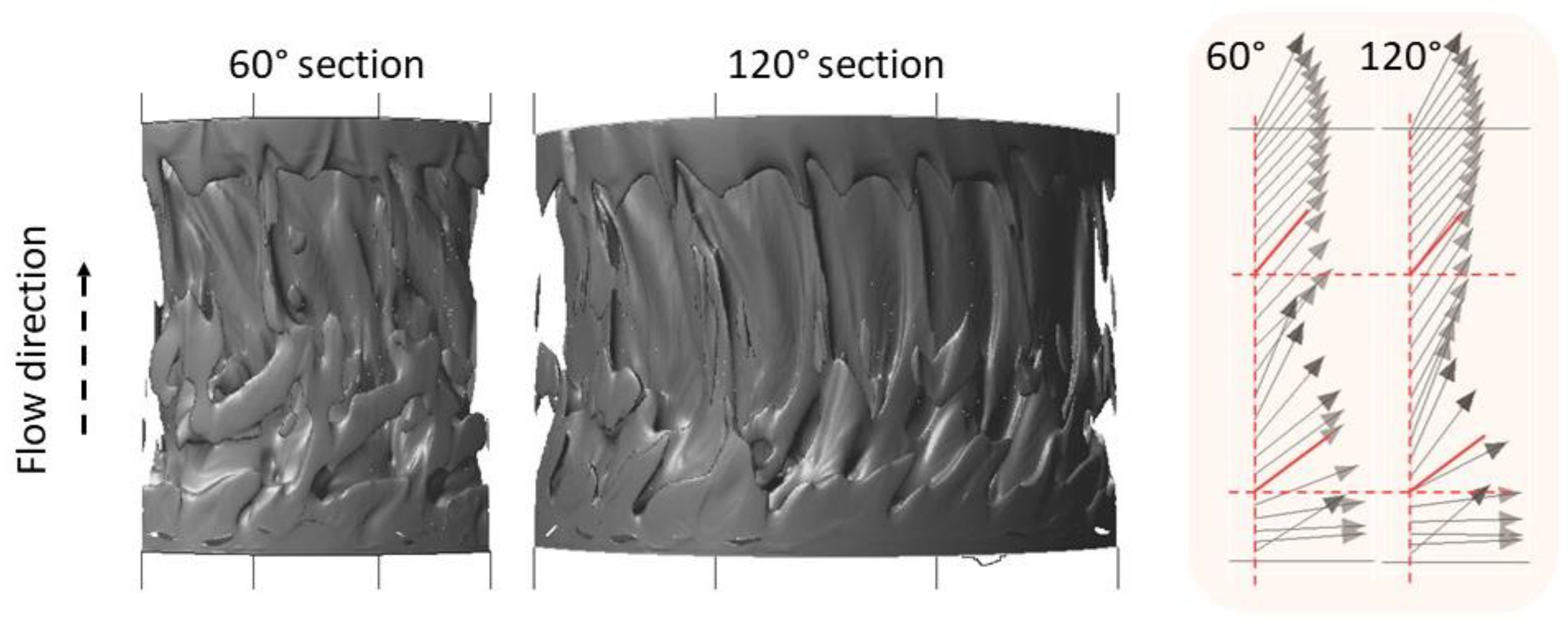
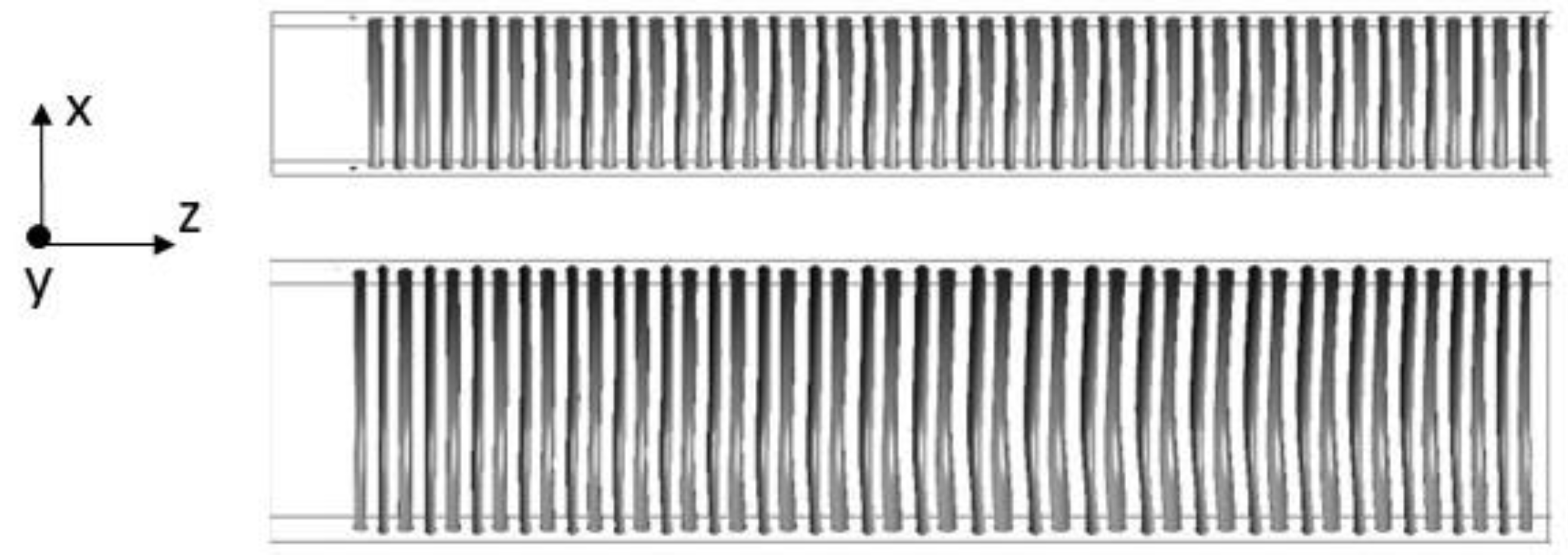
- Are vortex structures present, and what is their size range and span in the azimuth direction?
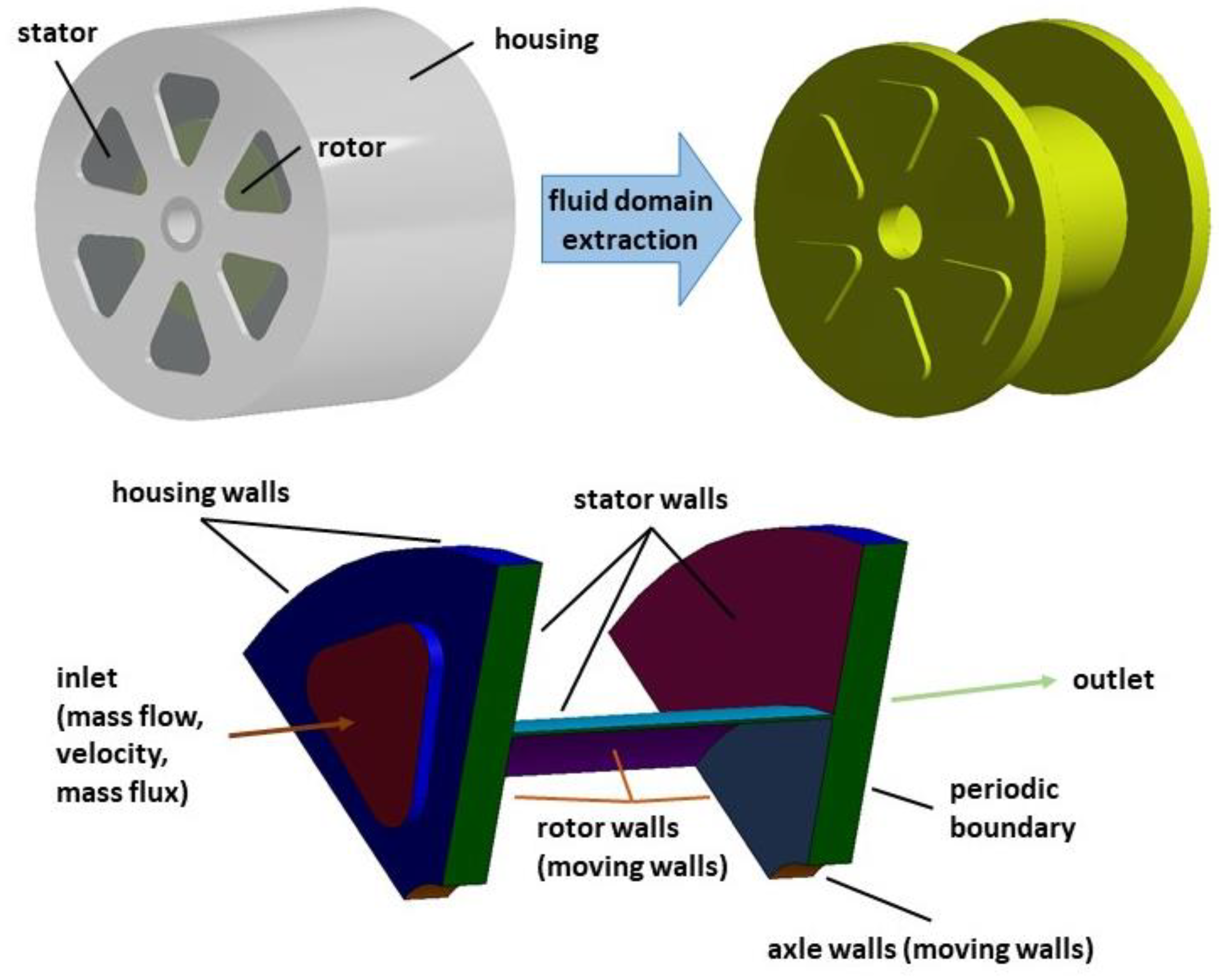
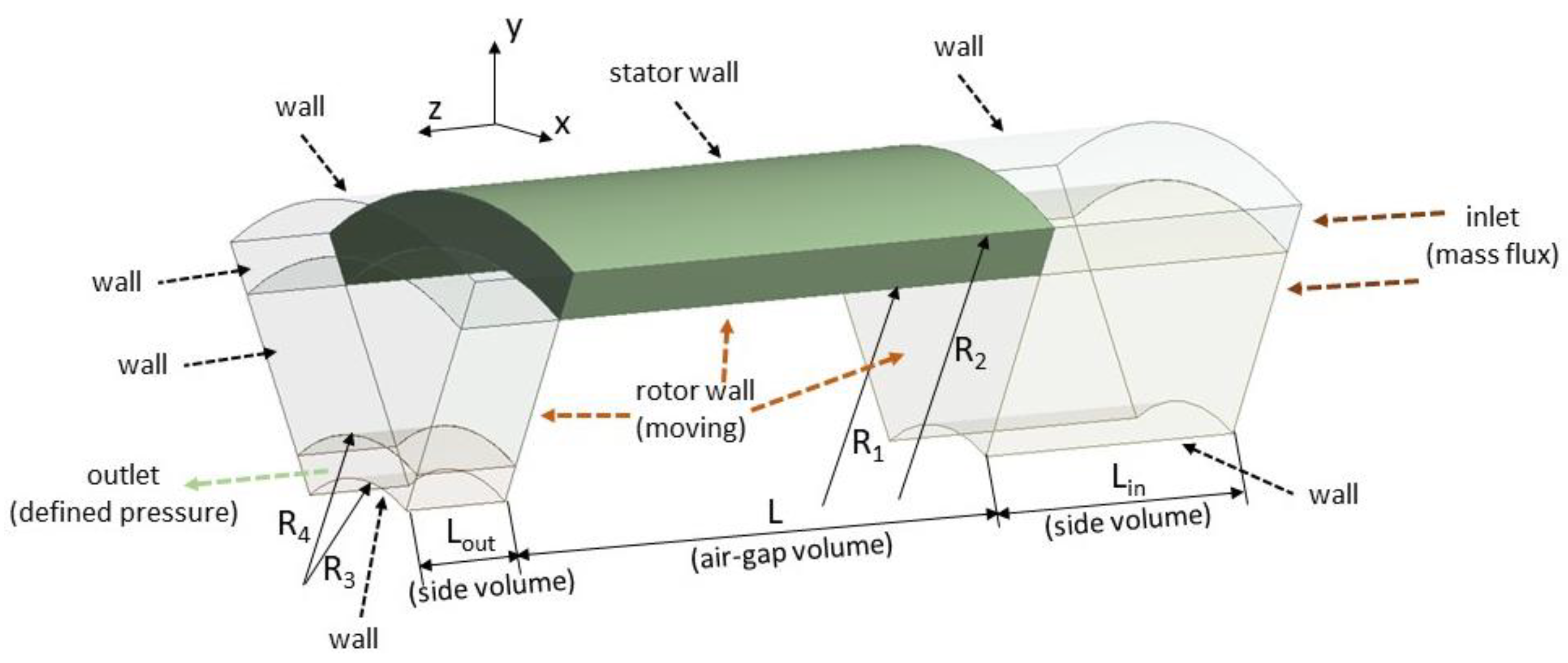
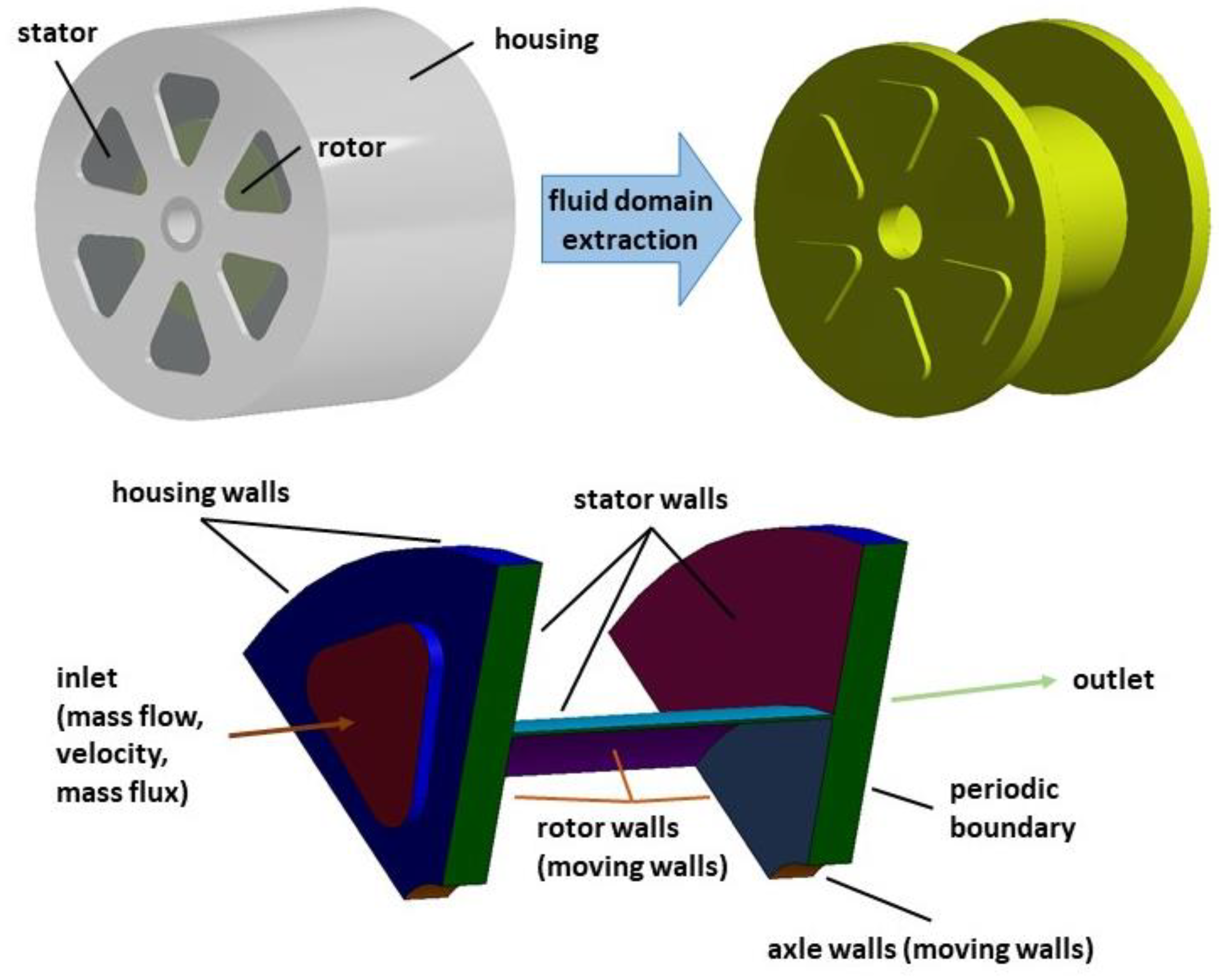
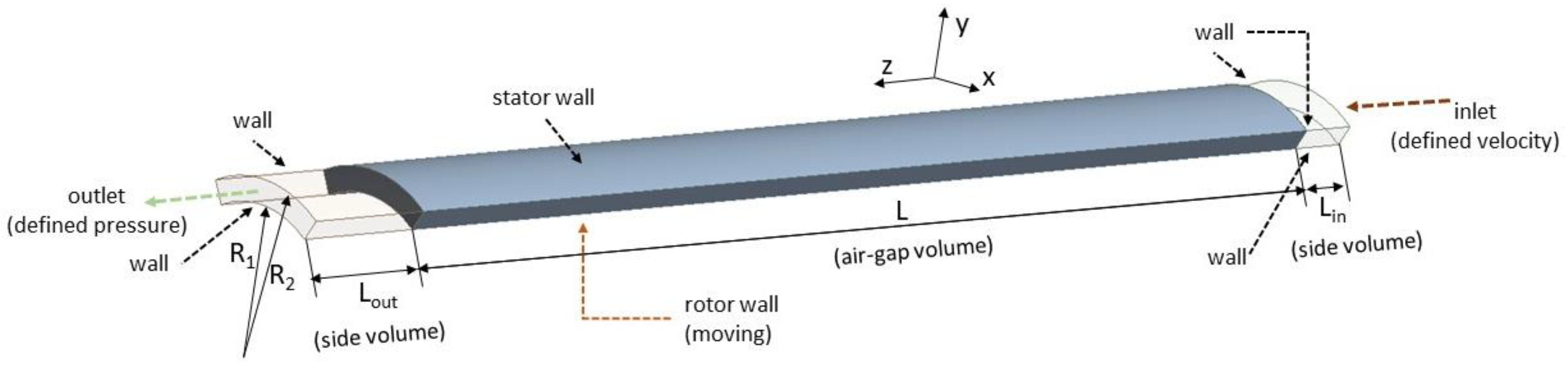
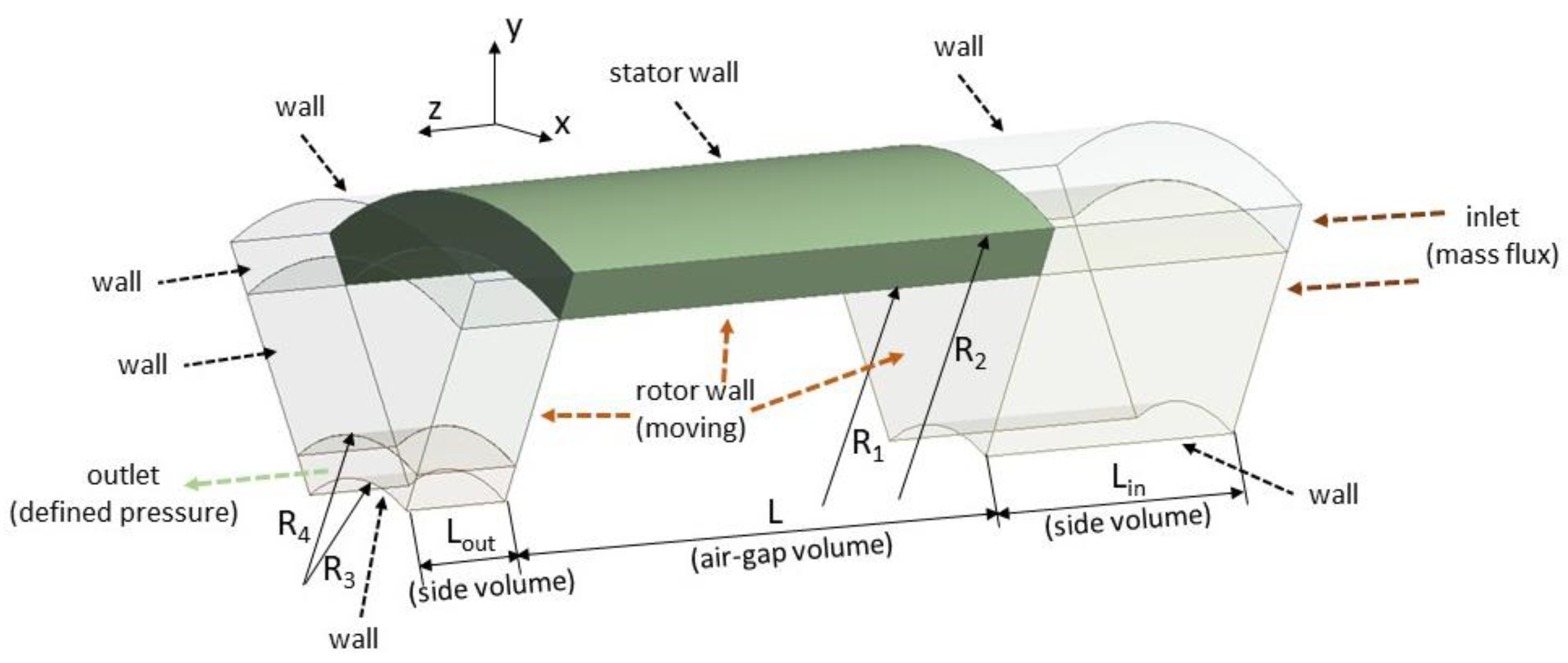
2.3.1. Definitions of Computational Domain, Boundary and Initial Conditions (Step 1)
- (a)
- Computational domain
- (b)
- Boundary and initial conditions
2.3.2. Initial 3D CFD Model Definition (Step 2)
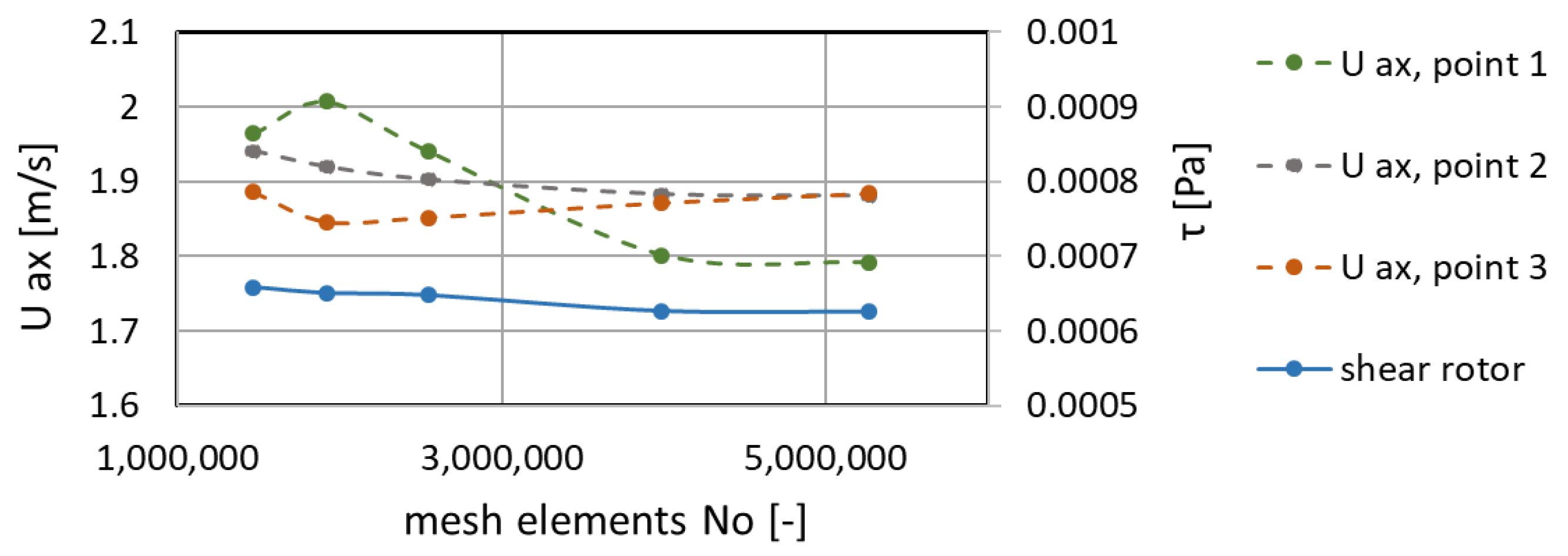
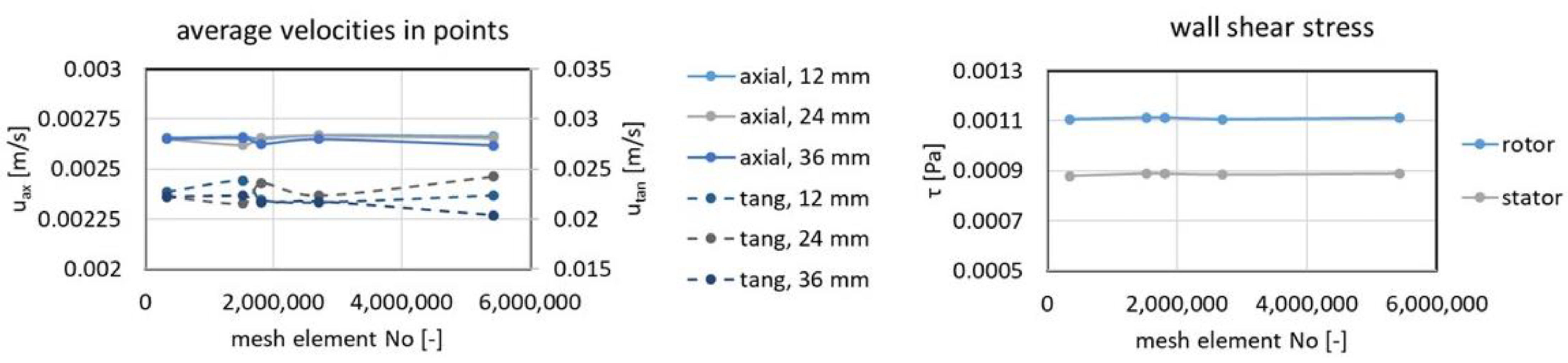
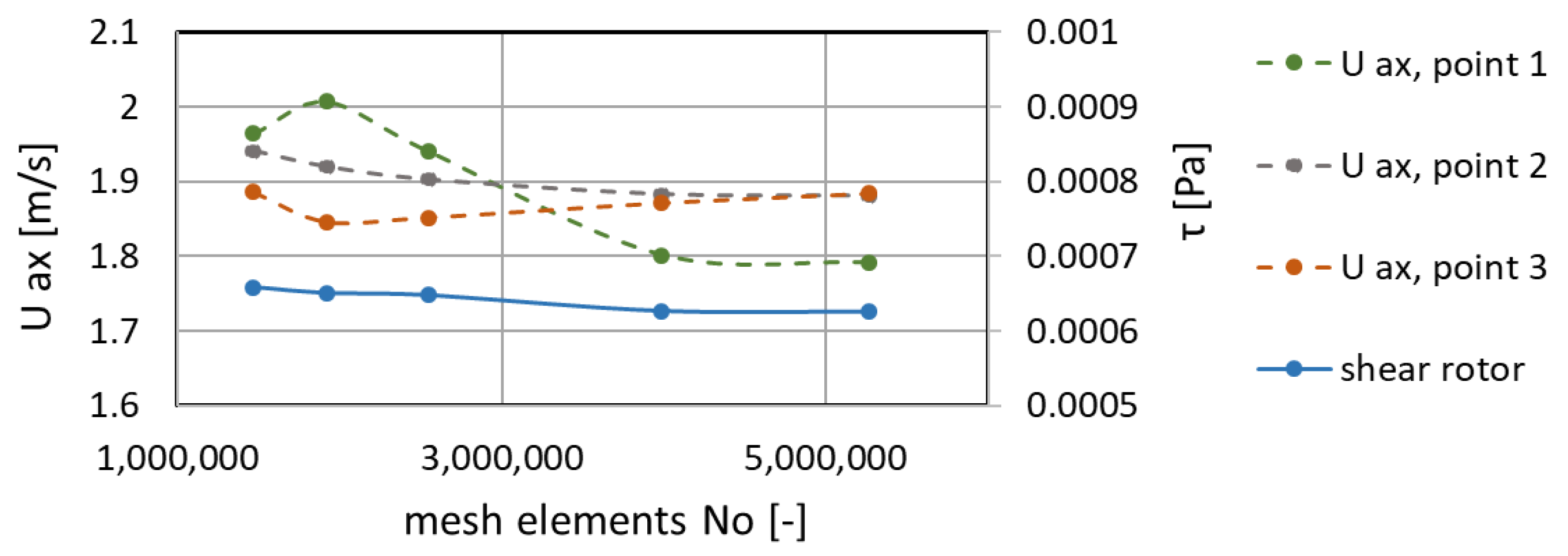
2.3.3. Mesh Independence Study (Step 3)
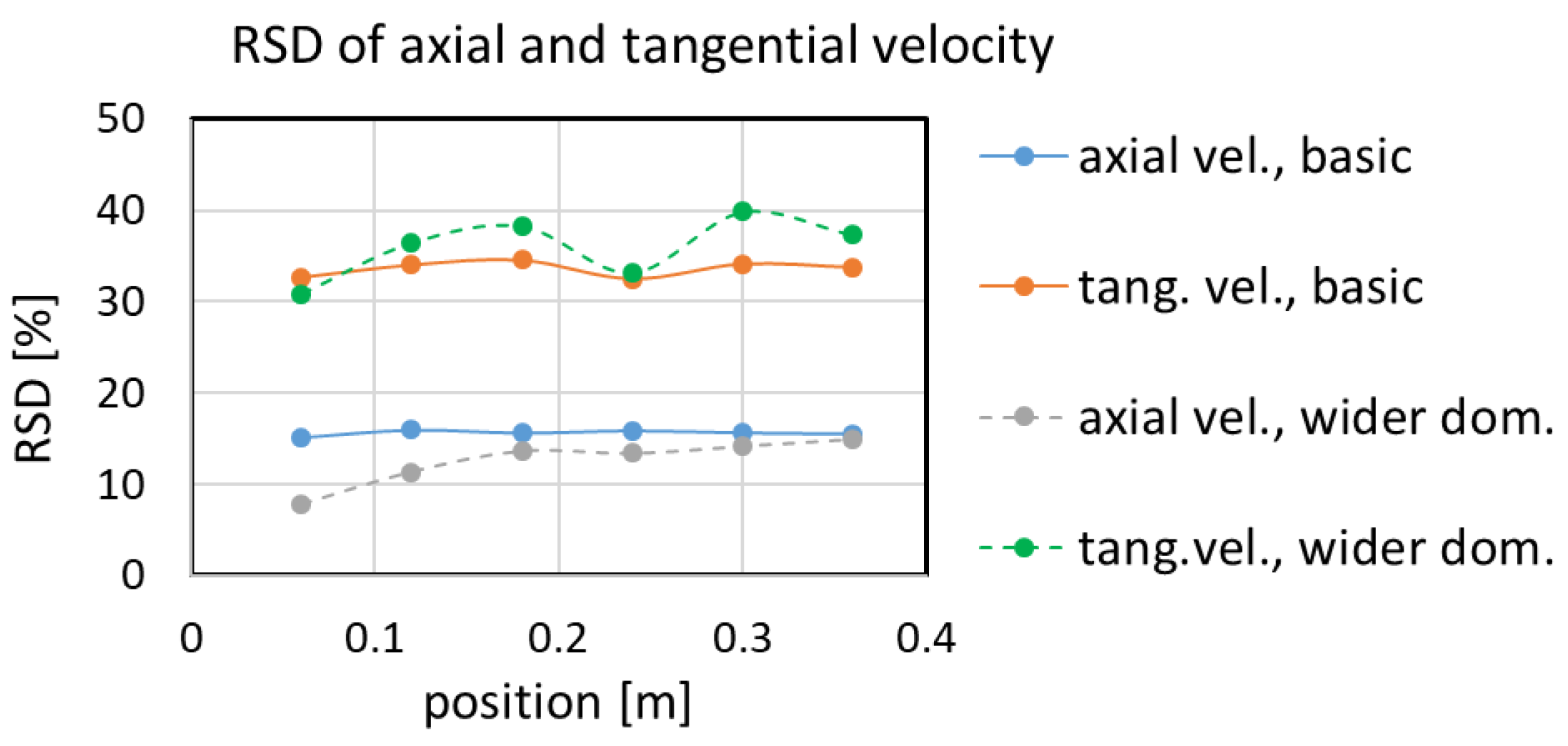
2.3.4. Defining Adequate 3D CFD Models for Observed Flow Conditions (Steps 4, 5 and 6)
- (a)
- Should steady or unsteady flow modelling be applied?
- (b)
- Defining the adequate domain span
- (c)
- Defining the adequate flow model
2.3.5. Simulations with Adequate 3D CFD Models and Results Analysis (Step 7)
3. Results
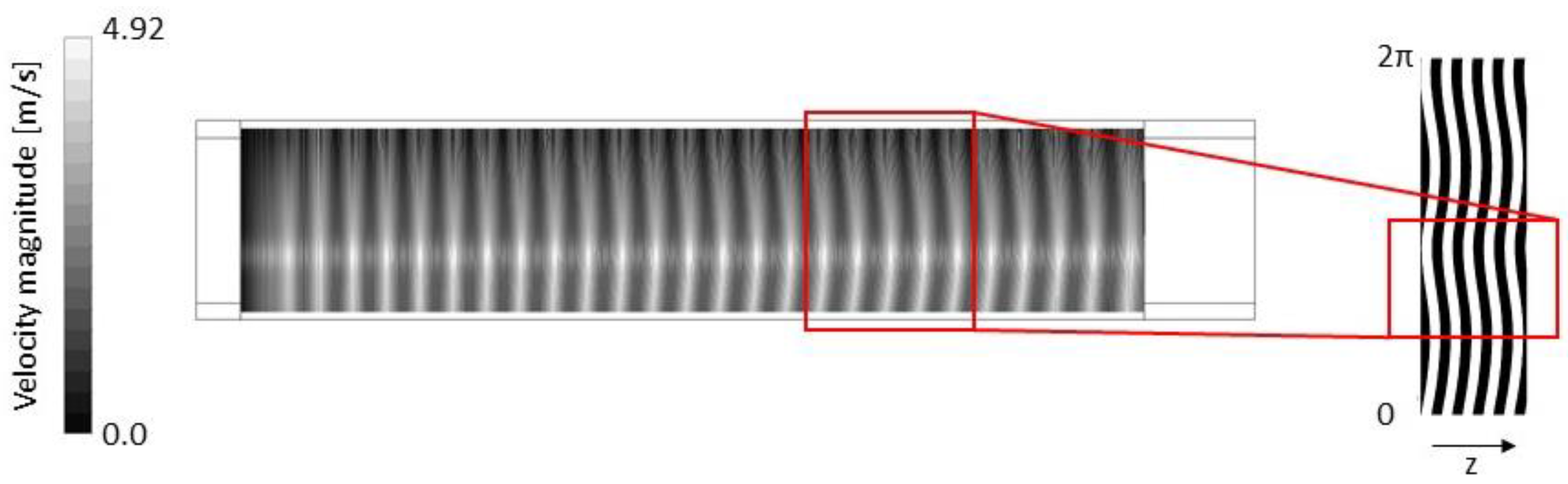
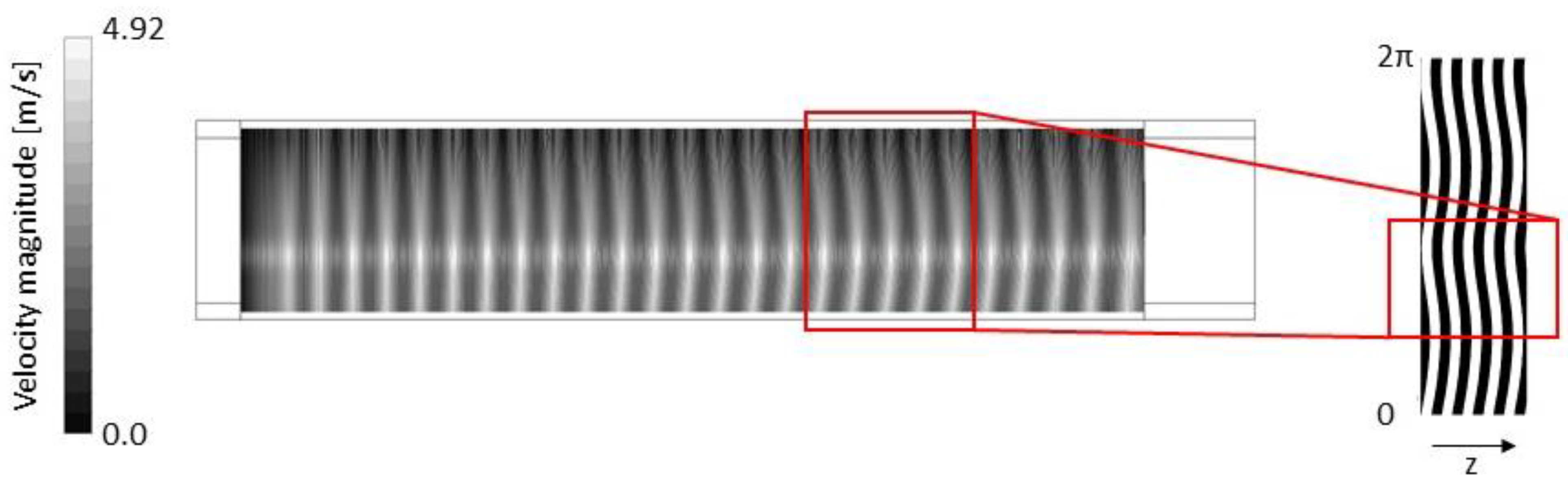
3.1. Laminar TCP Flow with Wavy Taylor Vortices
3.1.1. Definition of Computational Domain and Boundary Conditions (Step 1)
3.1.2. Initial 3D CFD Model Definition and Mesh Independence Study (Steps 2 and 3)
3.1.3. Definition of the Adequate 3D CFD Models (Steps 4, 5 and 6)
3.1.4. Analysis of Final Results (Step 7)
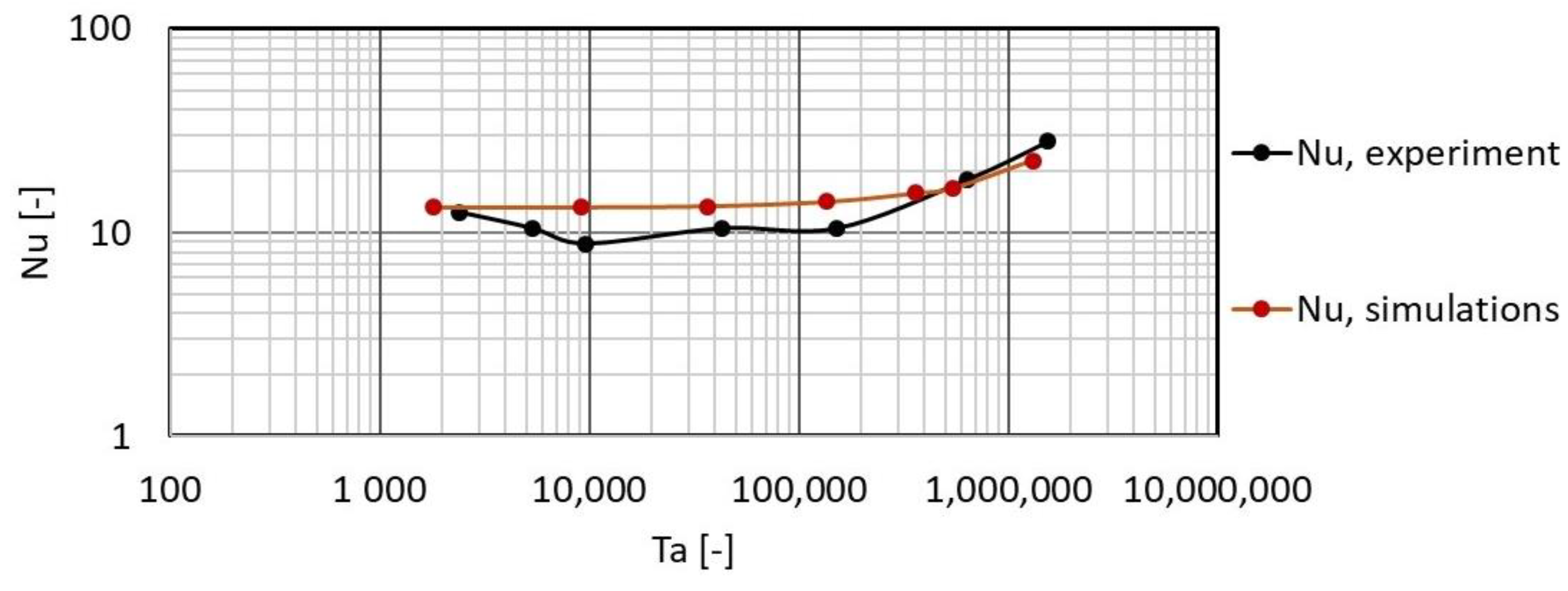
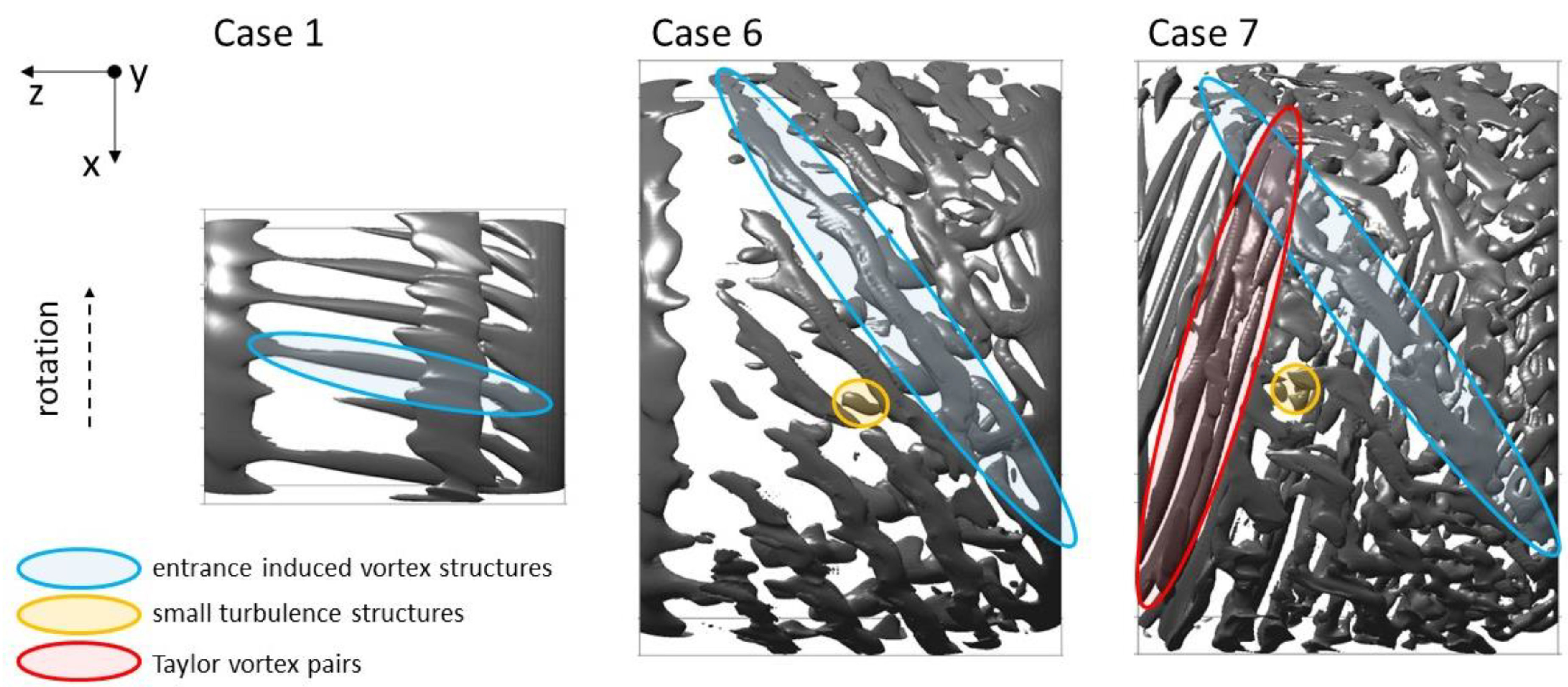
3.2. Turbulent TCP Flow in a Smooth and Short Air Gap
3.2.1. Definition of Computational Domain and Boundary Conditions (Step 1)
3.2.2. Initial 3D CFD Model Definition and Mesh Independence Study (Steps 2 and 3)
3.2.3. Definition of the Adequate 3D CFD Models (Steps 4, 5 and 6)
3.2.4. Analysis of Final Results (Step 7)
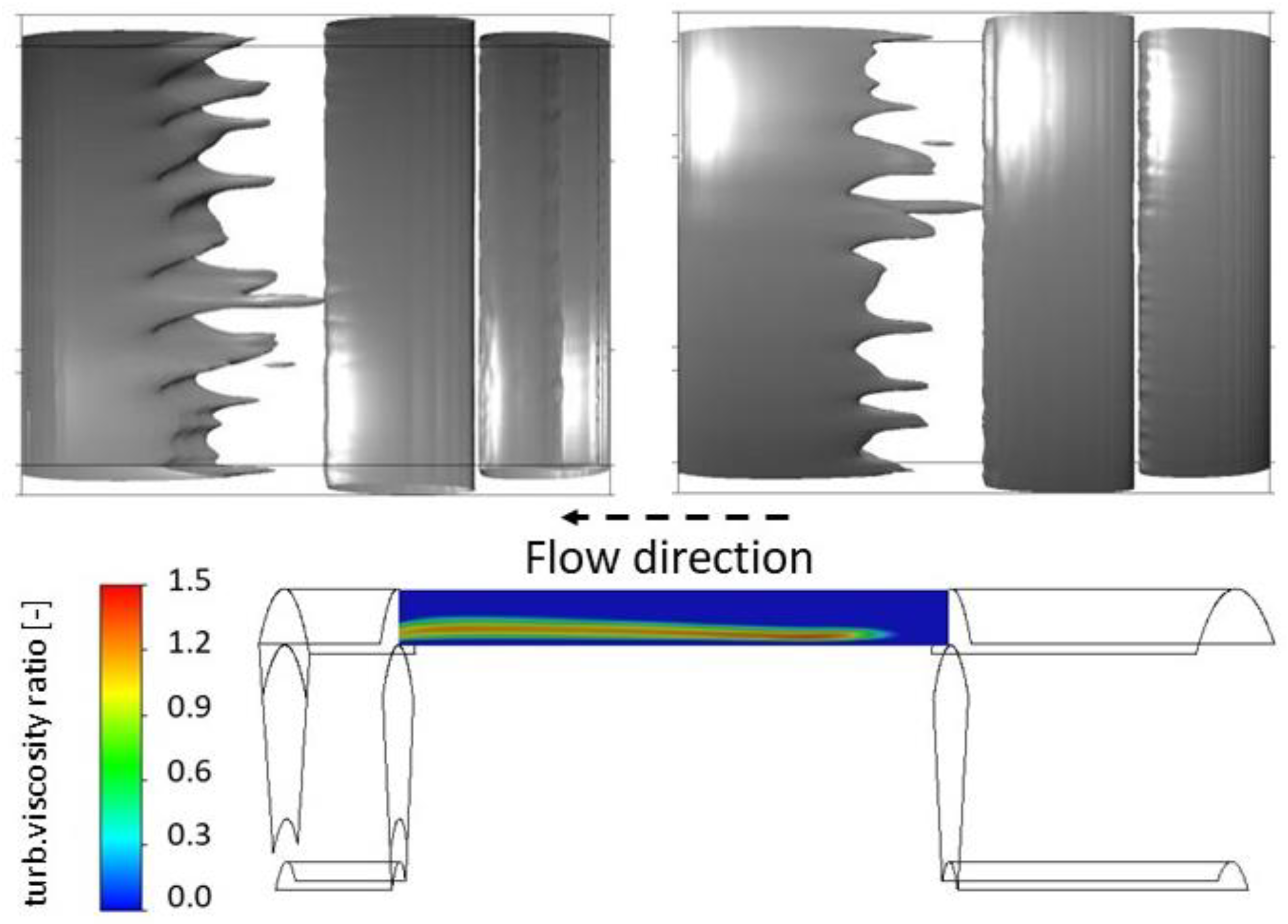
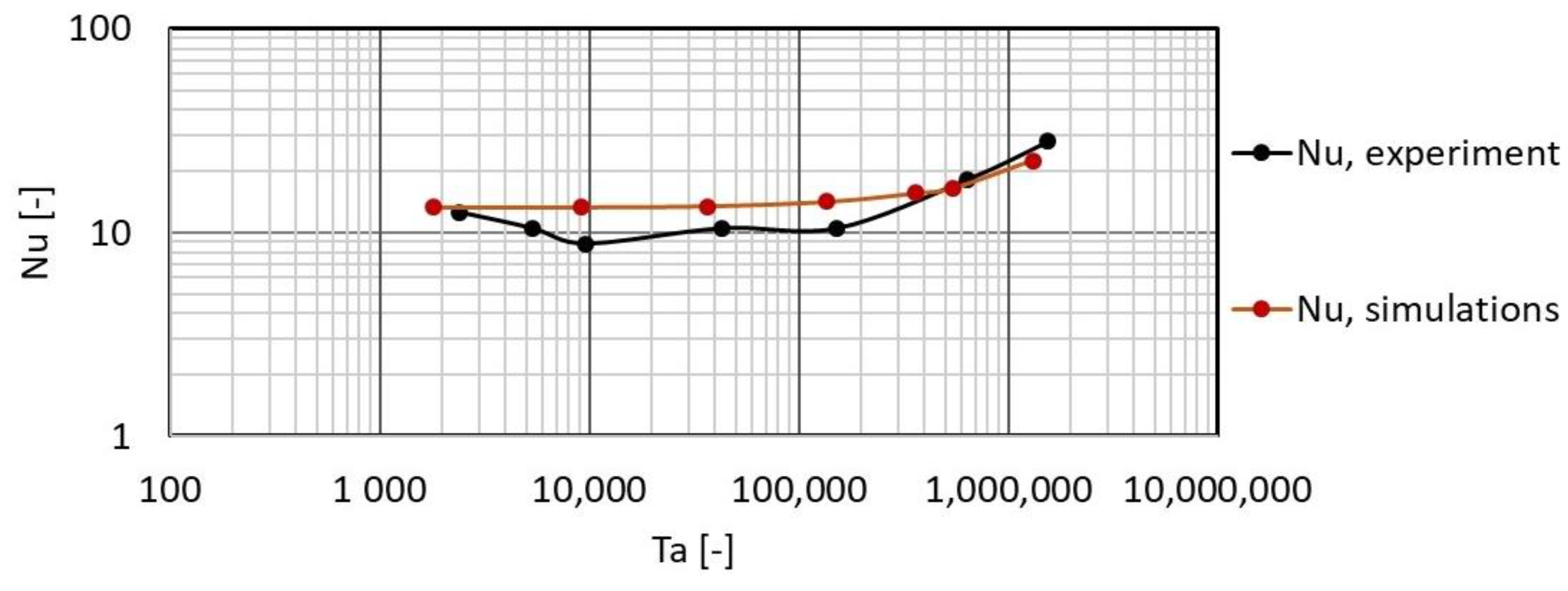
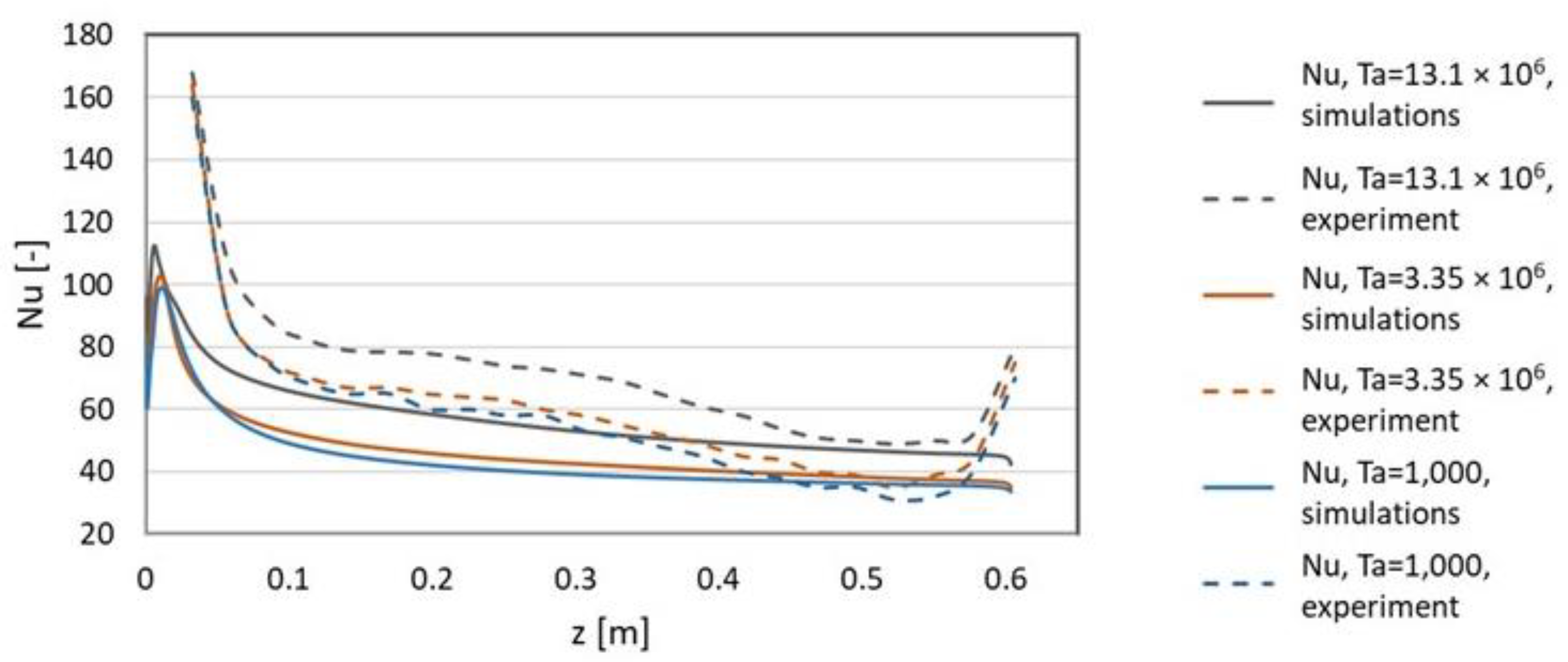
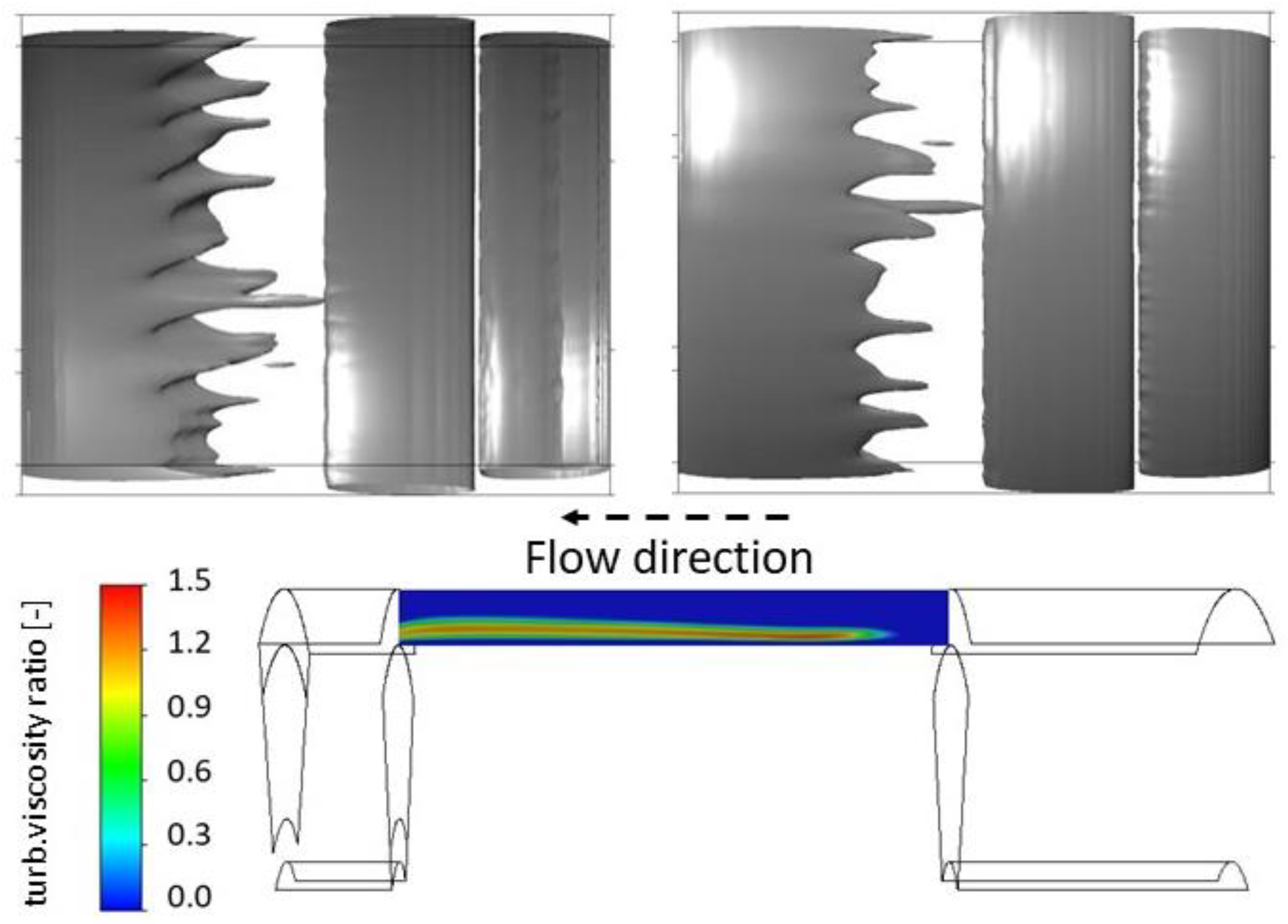
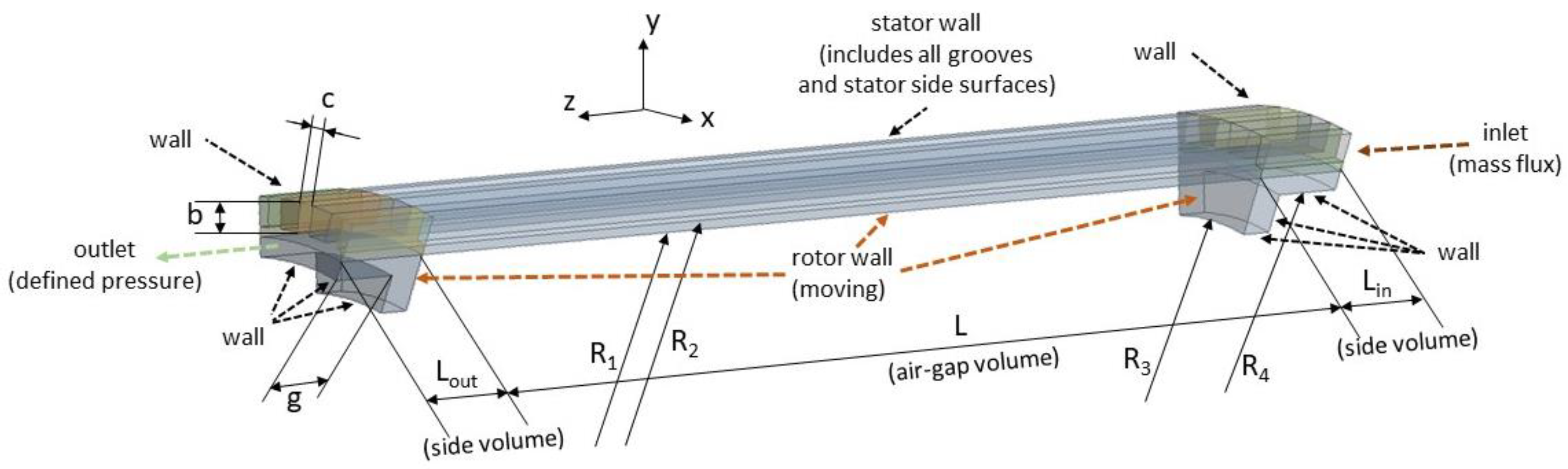
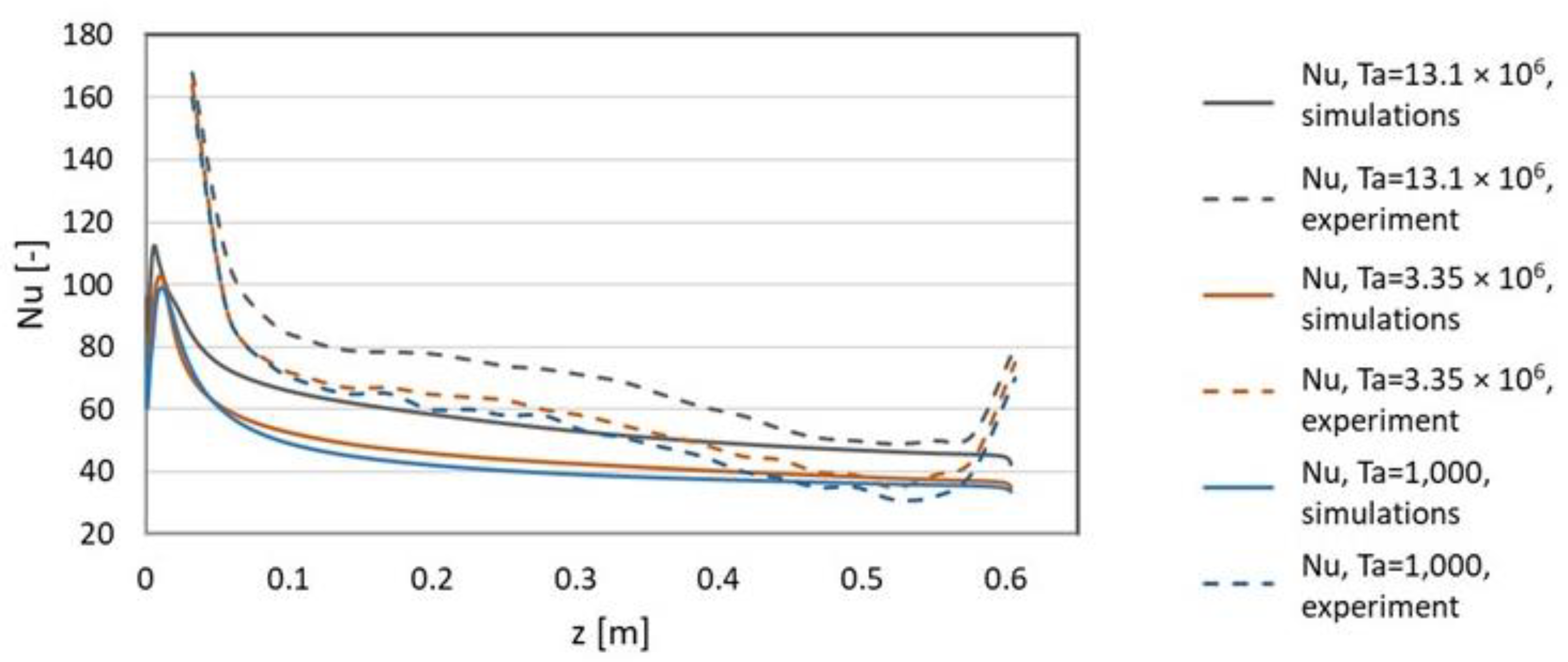
3.3. Local Heat Transfer Description in a Turbulent TCP Flow in a Grooved Air Gap
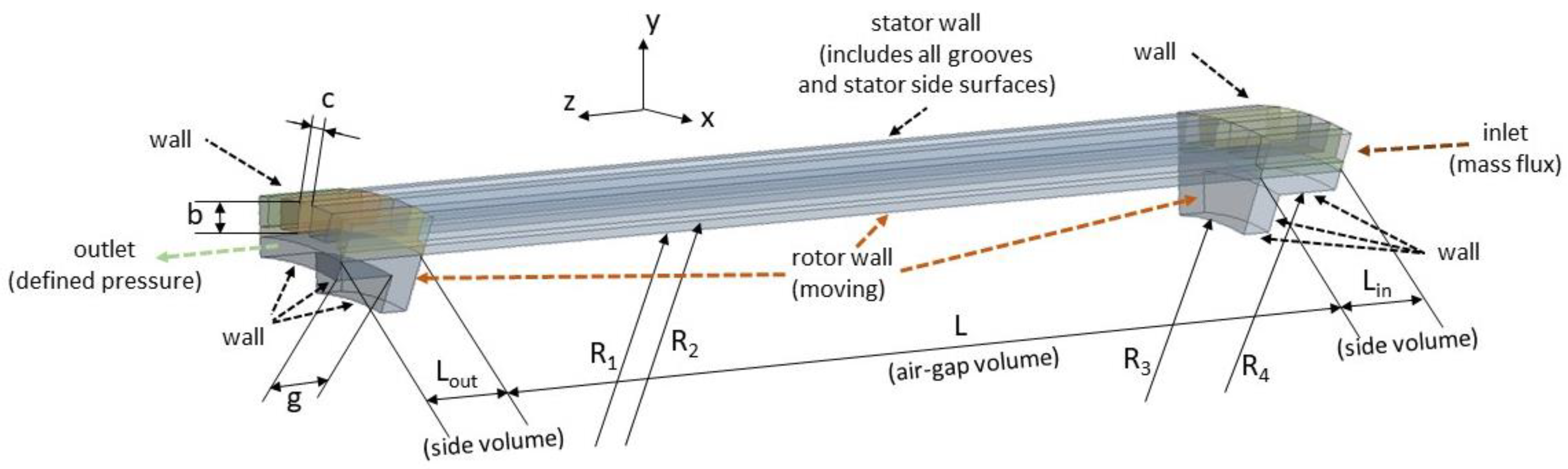
3.3.1. Definition of Computational Domain and Boundary Conditions (Step 1)
3.3.2. Initial 3D CFD Model Definition and Mesh Independence Study (Steps 2 and 3)
3.3.3. Definition of the Adequate 3D CFD Models (Steps 4, 5 and 6)
3.3.4. Analysis of Final Results (Step 7)
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| acronyms/abbreviations | |||
| TC | Taylor–Couette | radius [m] | |
| TCP | Taylor–Couette–Poiseuille | air-gap length [m] | |
| EM | electric machine | groove height [m] | |
| PIV | particle image velocimetry | groove width [m] | |
| LDV | laser Doppler velocimetry | number of grooves [-] | |
| IR | infrared | reference heat transfer area [m2] | |
| RANS | Reynolds averaged Navier–Stokes | mean radius [m] | |
| LES | large eddy simulations | air-gap wetted perimeter [m] | |
| DNS | direct numerical simulations | hydraulic diameter [m] | |
| dimensionless numbers | average velocity [m/s] | ||
| Nusselt number | pressure [Pa] | ||
| ratio of air-gap rotor and stator radii | air-gap cross sectional area [m2] | ||
| air-gap axial aspect ratio | equivalent gap height [m] | ||
| groove aspect ratio | |||
| Reynolds number | temperature [K] | ||
| Taylor number | heat flow [W/m2] | ||
| geometric factor | heat flux [W/m2s] | ||
| geometric factor | kinematic viscosity [m2/s] | ||
| friction factor | dynamic viscosity [Pa∙s] | ||
| non-dimensional distance from the wall | rotational velocity [rad/s] | ||
| C | Courant number | density [kg/m3] | |
| indexes | thermal conductivity [W/mK] | ||
| 1 | rotor | convective heat transfer coefficient | |
| 2 | stator | [W/m2K] | |
| ax | axial | time [s] | |
| tangential | velocity vector [m/s] | ||
| eff | effective | unit tensor [-] | |
| b | bulk | total energy [m2/s2] | |
| cr | critical | turbulence kinetic energy [m2/s2] | |
| T | turbulent | specific dissipation rate [1/s] | |
| variables | [Pa∙s] | ||
| [Pa∙s] | [kg/m∙s3] | ||
| [kg/m∙s3] | [kg/m3∙s2] | ||
| [kg/m3∙s2] | cross-diffusion term [kg/m3∙s2] |
References
- Couette, M. Oscillations tournantes d’un solide de révolution en contact avec un fluide visqueux. C. R. Séances L’acad. Sci. Paris 1887, 105, 1064–1067. [Google Scholar]
- Taylor, G.I. Stability of viscous liquid contained between two rotating cylinders. Philos. Trans. R. Soc. Lond. Ser. A 1923, 223, 289–343. [Google Scholar]
- Hamidi, K.; Rezoug, T.; Poncet, S. Numerical modeling of heat transfer in Taylor-Couette-Poiseuille systems. Defect Diffus. Forum 2019, 390, 125–132. [Google Scholar] [CrossRef]
- Kaye, J.; Elgar, E.C. Modes of adiabatic and diabatic fluid flow in an annulus with an inner rotating cylinder. Trans. ASME 1958, 80, 753–765. [Google Scholar] [CrossRef]
- Gardiner, S.R.M.; Sabersky, R.H. Heat transfer in an annular gap. Int. J. Heat Mass Transf. 1978, 21, 1459–1466. [Google Scholar] [CrossRef]
- Lee, Y.N.; Minkowycz, W.J. Heat transfer characteristics of the annulus of twocoaxial cylinders with one cylinder rotating. Int. J. Heat Mass. Transf. 1989, 32, 711–722. [Google Scholar] [CrossRef]
- Bouafia, M.; Bertin, Y.; Saulnier, J.B. Experimental analysis of heat transfer in a narrow and grooved annular gap with rotating inner cylinder. Int. J. Heat Mass. Transf. 1998, 41, 1279–1291. [Google Scholar] [CrossRef]
- Fénot, M.; Dorignac, E.; Giret, A.; Lalizel, G. Convective heat transfer in the entry region of an annular channel with slotted rotating inner cylinder. Appl. Therm. Eng. 2013, 54, 345–358. [Google Scholar] [CrossRef]
- Liu, D.; Kang, I.S.; Cha, J.E.; Kim, H.B. Experimental study on radial temperature gradient effect of a Taylor-Couette flow with axial wall slits. Exp. Therm. Fluid Sci. 2011, 35, 1282–1292. [Google Scholar] [CrossRef]
- Aubert, A.; Poncet, S.; Le Gal, P.; Viazzo, S.; Le Bars, M. Velocity and temperature measurements in a turbulent water-filled Taylor-Couette-Poiseuille system. Int. J. Therm. Sci. 2015, 90, 238–247. [Google Scholar] [CrossRef]
- Fénot, M.; Bertin, Y.; Dorignac, E.; Lalizel, G. A review of heat transfer between concentric rotating cylinders with or without axial flow. Int. J. Therm. Sci. 2011, 50, 1138–1155. [Google Scholar] [CrossRef]
- Nouri-Borujerdi, A.; Nakhchi, M.E. Heat transfer enhancement in annular flow with outer grooved cylinder and rotating inner cylinder: Review and experiments. Appl. Therm. Eng. 2017, 120, 257–268. [Google Scholar] [CrossRef]
- Nouri-Borujerdi, A.; Nakhchi, M.E. Optimization of the heat transfer coefficient and pressure drop of Taylor-Couette-Poiseuille flows between an inner rotating cylinder and an outer grooved stationary cylinder. Int. J. Heat Mass. Transf. 2017, 108, 1449–1459. [Google Scholar] [CrossRef]
- Dirker, J.; Van Der Vyver, H.; Meyer, J.P. Convection heat transfer in concentric annuli. Exp. Heat Transf. 2004, 17, 19–29. [Google Scholar] [CrossRef]
- Mehrez, I.; Gheith, R.; Aloui, F.; Ben Nasrallah, S. Theoretical and numerical study of Couette-Taylor flow with an axial flow using lattice Boltzmann method. Int. J. Numer. Methods Fluids 2019, 90, 427–441. [Google Scholar] [CrossRef]
- Afra, B.; Amiri Delouei, A.; Mostafavi, M.; Tarokh, A. Fluid-structure interaction for the flexible filament’s propulsion hanging in the free stream. J. Mol. Liq. 2021, 323, 114941. [Google Scholar] [CrossRef]
- Jalali, A.; Delouei, A.A.; Khorashadizadeh, M.; Golmohamadi, A.; Karimnejad, S. Mesoscopic simulation of forced convective heat transfer of Carreau-Yasuda fluid flow over an inclined square: Temperature-dependent viscosity. J. Appl. Comput. Mech. 2020, 6, 307–319. [Google Scholar] [CrossRef]
- Hayase, T.; Humphrey, J.A.C.; Greif, R. Numerical calculation of convective heat transfer between rotating coaxial cylinders with periodically embedded cavities. J. Heat Transf. 1992, 114, 589–597. [Google Scholar] [CrossRef]
- Bouafia, M.; Ziouchi, A.; Bertin, Y.; Saulnier, J.B. Experimental and numerical study of heat transfer in an annular gap without axial flow with a rotating inner cylinder. Int. J. Therm. Sci. 1999, 38, 547–559. [Google Scholar] [CrossRef]
- Sommerer, Y.; Lauriat, G. Numerical study of steady forced convection in a grooved annulus using a design of experiments. J. Heat Transf. 2001, 123, 837–848. [Google Scholar] [CrossRef]
- Hwang, J.Y.; Yang, K.S. Numerical study of Taylor-Couette flow with an axial flow. Comput. Fluids 2004, 33, 97–118. [Google Scholar] [CrossRef]
- Poncet, S.; Haddadi, S.; Viazzo, S. Numerical modeling of fluid flow and heat transfer in a narrow Taylor-Couette-Poiseuille system. Int. J. Heat Fluid Flow 2011, 32, 128–144. [Google Scholar] [CrossRef] [Green Version]
- Poncet, S.; Da Soghe, R.; Bianchini, C.; Viazzo, S.; Aubert, A. Turbulent Couette-Taylor flows with endwall effects: A numerical benchmark. Int. J. Heat Fluid Flow 2013, 44, 229–238. [Google Scholar] [CrossRef] [Green Version]
- Foudrinier, M.; Poncet, S.; Moreau, S.; Torriano, F. Numerical study in a Taylor-Couette-Poiseuille system. In Proceedings of the 24th Annual Conference of the CFD Society of Canada, Kelowna, BC, Canada, 26–29 June 2016. [Google Scholar]
- Romanazzi, P.; Howey, D.A. Air-gap convection in a switched reluctance machine. In Proceedings of the 2015 Tenth International Conference on Ecological Vehicles and Renewable Energies, EVER 2015, Monte Carlo, Monaco, 31 March–2 April 2015. [Google Scholar] [CrossRef] [Green Version]
- Lancial, N.; Torriano, F.; Beaubert, F.; Harmand, S.; Rolland, G. Study of a Taylor-Couette-Poiseuille flow in an annular channel with a slotted rotor. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM 2014), Berlin, Germany, 2–5 September 2014; pp. 1422–1429. [Google Scholar] [CrossRef]
- Lancial, N.; Torriano, F.; Beaubert, F.; Harmand, S.; Rolland, G. Taylor-Couette-Poiseuille flow and heat transfer in an annular channel with a slotted rotor. Int. J. Therm. Sci. 2017, 112, 92–103. [Google Scholar] [CrossRef]
- Nouri-Borujerdi, A.; Nakhchi, M.E. Prediction of local shear stress and heat transfer between internal rotating cylinder and longitudinal cavities on stationary cylinder with various shapes. Int. J. Therm. Sci. 2019, 138, 512–520. [Google Scholar] [CrossRef]
- Wereley, S.T.; Lueptow, R.M. Spatio-temporal character of non-wavy and wavy Taylor-Couette flow. J. Fluid Mech. 1998, 364, 59–80. [Google Scholar] [CrossRef] [Green Version]
- Wereley, S.T.; Lueptow, R.M. Velocity field for Taylor–Couette flow with an axial flow. Phys. Fluids 1999, 11, 3637. [Google Scholar] [CrossRef] [Green Version]
- Lueptow, R.M.; Docter, A.; Min, K. Stability of axial flow in an annulus with a rotating inner cylinder. Phys. Fluids A 1992, 4, 2446–2455. [Google Scholar] [CrossRef] [Green Version]
- Dong, Y.; Yan, Y.; Liu, C. New visualization method for vortex structure in turbulence by lambda2 and vortex filaments. Appl. Math. Model. 2016, 40, 500–509. [Google Scholar] [CrossRef]
- Ansys®, Academic Research Workbench, Release 19.2., Help System, Workbench User’s Guide, ANSYS, Inc.
- Ansys®, Academic Research Fluent, Release 19.2., Help System, Fluent Theory Guide, ANSYS, Inc.
- Munters, W.; Meneveau, C.; Meyers, J. Shifted periodic boundary conditions for simulations of wall-bounded turbulent flows. Phys. Fluids 2016, 28, 025112. [Google Scholar] [CrossRef] [Green Version]
- Versteeg, H.K.; Malalasekera, W. An Introduction to Computational Fluid Dynamics: The Finite Volume Method; [OpenFOAM]; Longman Scientific & Technical: Harlow, UK; Wiley: New York, NY, USA, 2015. [Google Scholar]
- Menter, F.R.; Langtry, R.; Völker, S. Transition Modelling for General Purpose CFD Codes. Flow Turbul. Combust. 2006, 77, 277–303. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimension | [mm] | [mm] | [mm] | [mm] | [mm] | [mm] | [mm] | [-] | [-] |
|---|---|---|---|---|---|---|---|---|---|
| value | 43.4 | 52.3 | 8.9 | 17.8 | 410 | 20 | 50 | 0.83 | 46.07 |
| Flow Parameter | [-] | [-] | [m/s] | [rad/s] |
|---|---|---|---|---|
| value | 9.8 | 3450 | 0.0083 | 5.4 |
| Mesh Property | Cell Axial Size [mm] | Cell Radial and Azimuth Size [mm] | Inflation Thickness [mm] | Number of Inflation Layers [-] | Cell Count [106] |
|---|---|---|---|---|---|
| value | 0.75 | 0.75 | 2 | 8 | 2.7 |
| Dimension | [mm] | [mm] | [mm] | [mm] | [mm] | [mm] | [mm] | [mm] | [-] | [-] |
|---|---|---|---|---|---|---|---|---|---|---|
| value | 55.55 | 63.5 | 25 | 31 | 15.9 | 77.9 | 40 | 16 | 0.875 | 9.87 |
| Flow Case | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| 1820 | 9140 | 36,560 | 137,000 | 364,100 | 546,300 | 1,312,300 |
| Mesh Property | Average Cell Axial Size [mm] | Cell Radial and Azimuth Size [mm] | Inflation Thickness [mm] | Number of Inflation Layers [-] | Cell Count [106] |
|---|---|---|---|---|---|
| value | 0.5 | 0.3 | 1.5 | 10 | 3.98 |
| Flow Case | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| steady/transient | steady | steady | steady | steady | transient | transient | transient |
| time step and value | / | / | / | / | 0.2 ms 2.4 | 0.2 ms 2.8 | 0.1 ms 2.12 |
| domain span | 60° | 60° | 60° | 60° | 120° | 120° | 120° |
| turbulence model | SST | ||||||
| Dimension | [mm] | [mm] | [mm] | [mm] | [mm] | [mm] | [mm] | [mm] | [mm] | [-] | [-] |
|---|---|---|---|---|---|---|---|---|---|---|---|
| value | 140 | 145 | 120 | 130 | 8.3 | 15 | 604 | 58 | 40 | 0.966 | 120.8 |
| Mesh Property | Cell Axial Size [mm] | Cell Radial and Azimuth Size [mm] | Inflation Thickness [mm] | Number of Inflation Layers [-] | Cell Count [106] |
|---|---|---|---|---|---|
| value | 0.8 | 0.4 | 2 | 15 (stator) 20 (rotor) | 23.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Žnidarčič, A.; Katrašnik, T. A 3D CFD-Based Workflow for Analyses of a Wide Range of Flow and Heat Transfer Conditions in Air Gaps of Electric Machines. Fluids 2022, 7, 273. https://doi.org/10.3390/fluids7080273
Žnidarčič A, Katrašnik T. A 3D CFD-Based Workflow for Analyses of a Wide Range of Flow and Heat Transfer Conditions in Air Gaps of Electric Machines. Fluids. 2022; 7(8):273. https://doi.org/10.3390/fluids7080273
Chicago/Turabian StyleŽnidarčič, Anton, and Tomaž Katrašnik. 2022. "A 3D CFD-Based Workflow for Analyses of a Wide Range of Flow and Heat Transfer Conditions in Air Gaps of Electric Machines" Fluids 7, no. 8: 273. https://doi.org/10.3390/fluids7080273
APA StyleŽnidarčič, A., & Katrašnik, T. (2022). A 3D CFD-Based Workflow for Analyses of a Wide Range of Flow and Heat Transfer Conditions in Air Gaps of Electric Machines. Fluids, 7(8), 273. https://doi.org/10.3390/fluids7080273