
Identifying the Origin of Turbulence Using Convolutional Neural Networks


Abstract
:1. Introduction
2. Materials and Methods
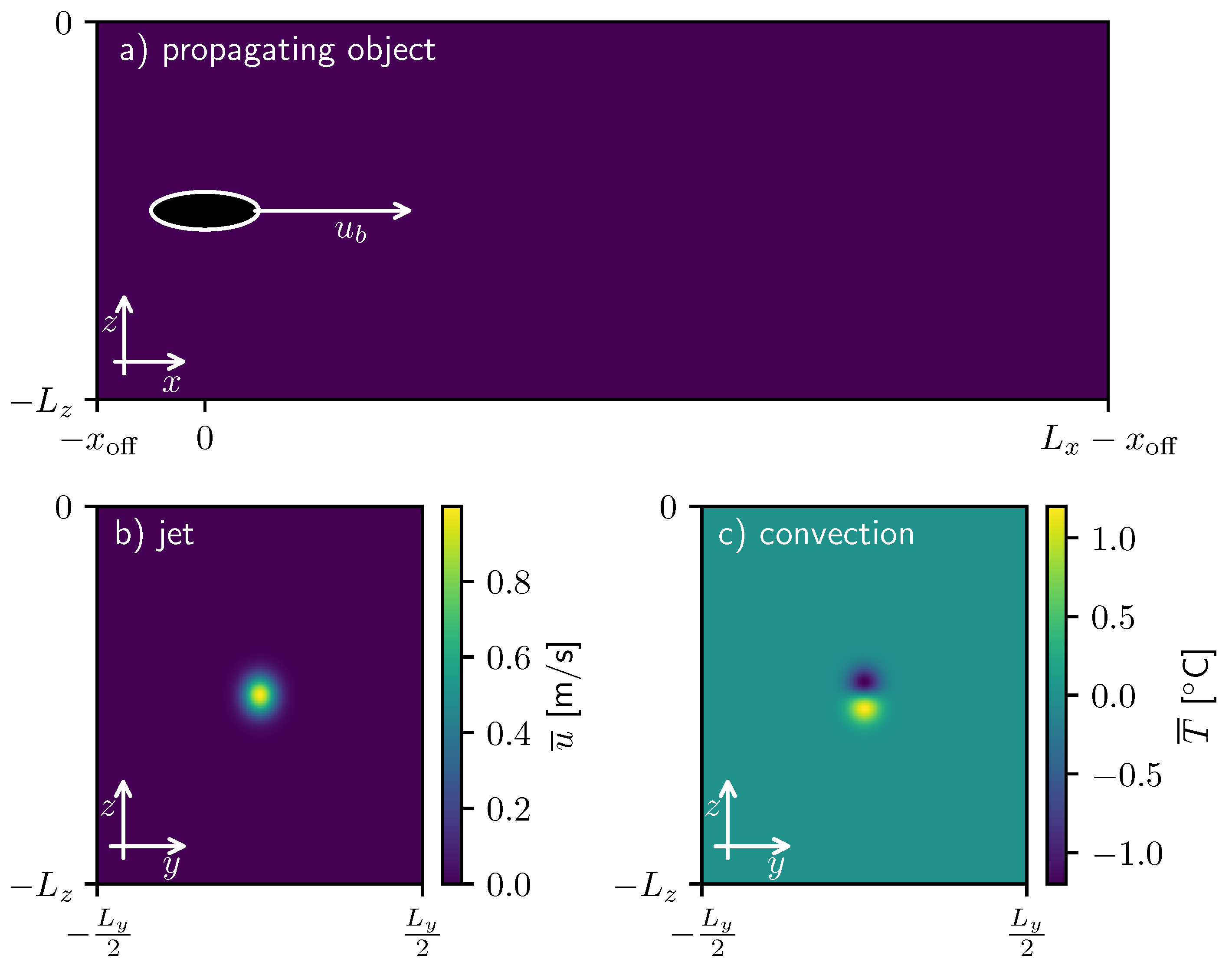
2.1. Propagating Object
2.2. Jet
2.3. Convection
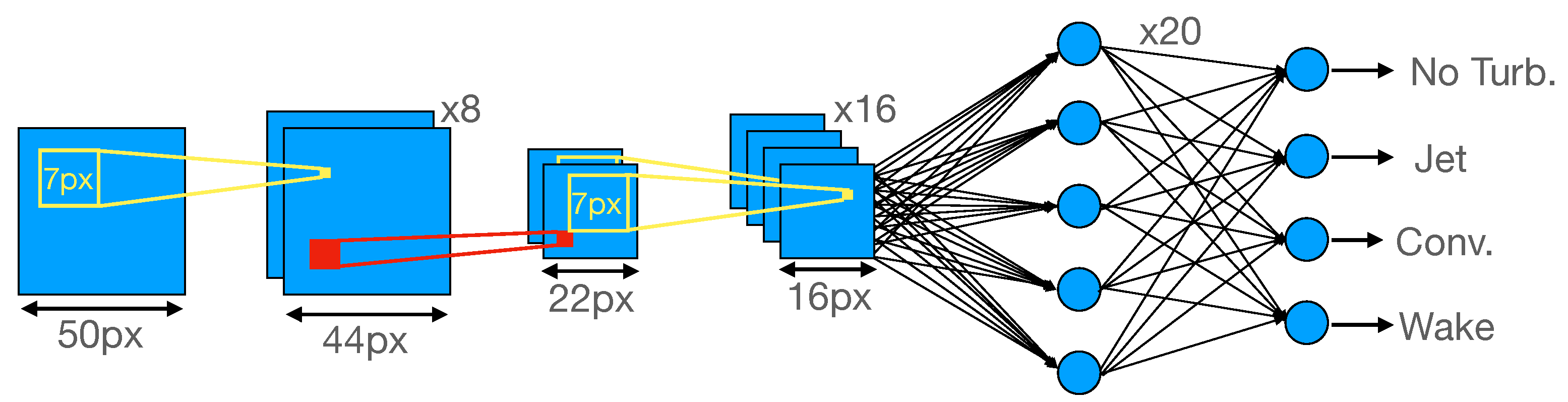
2.4. Artificial Neural Network Methodology
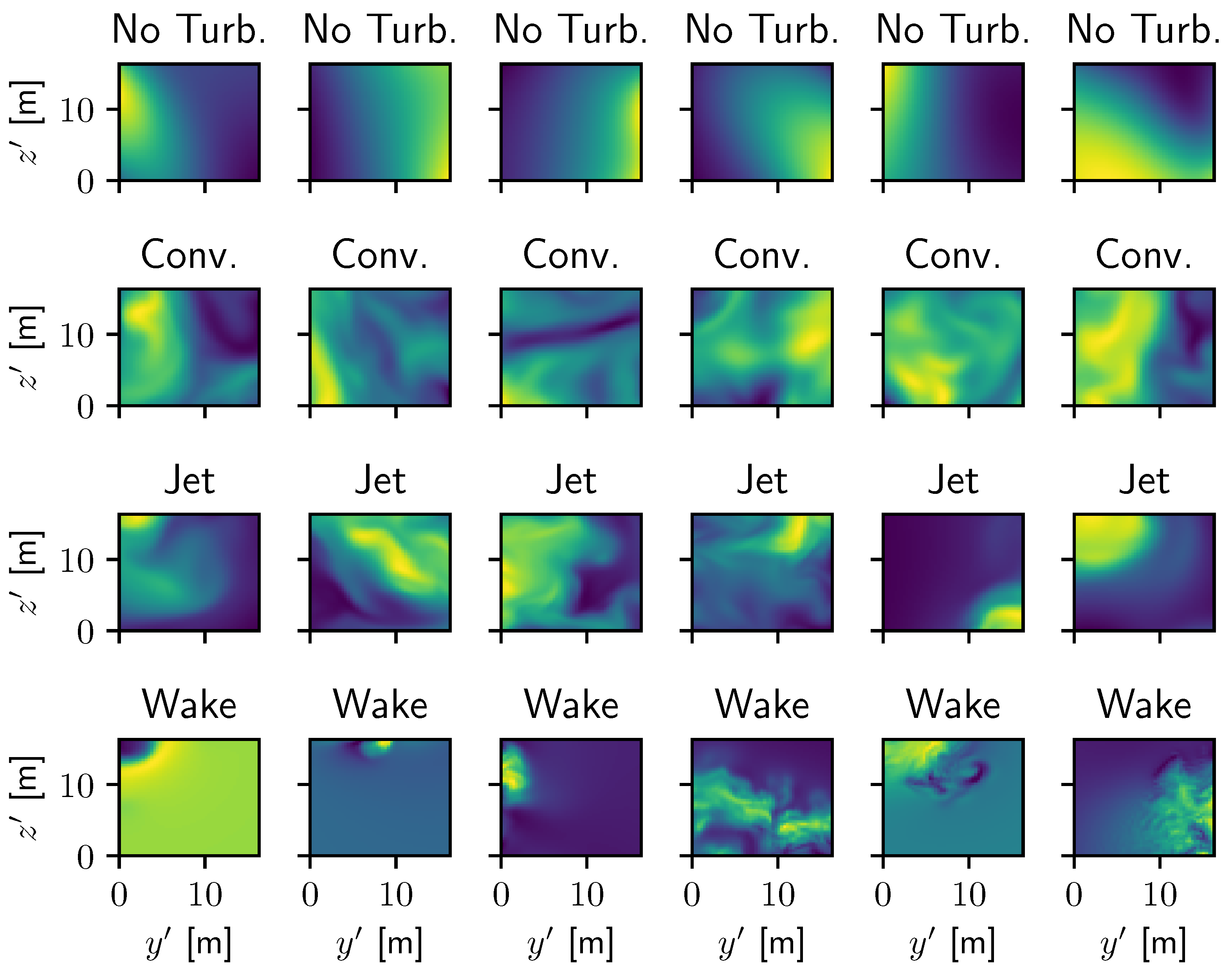
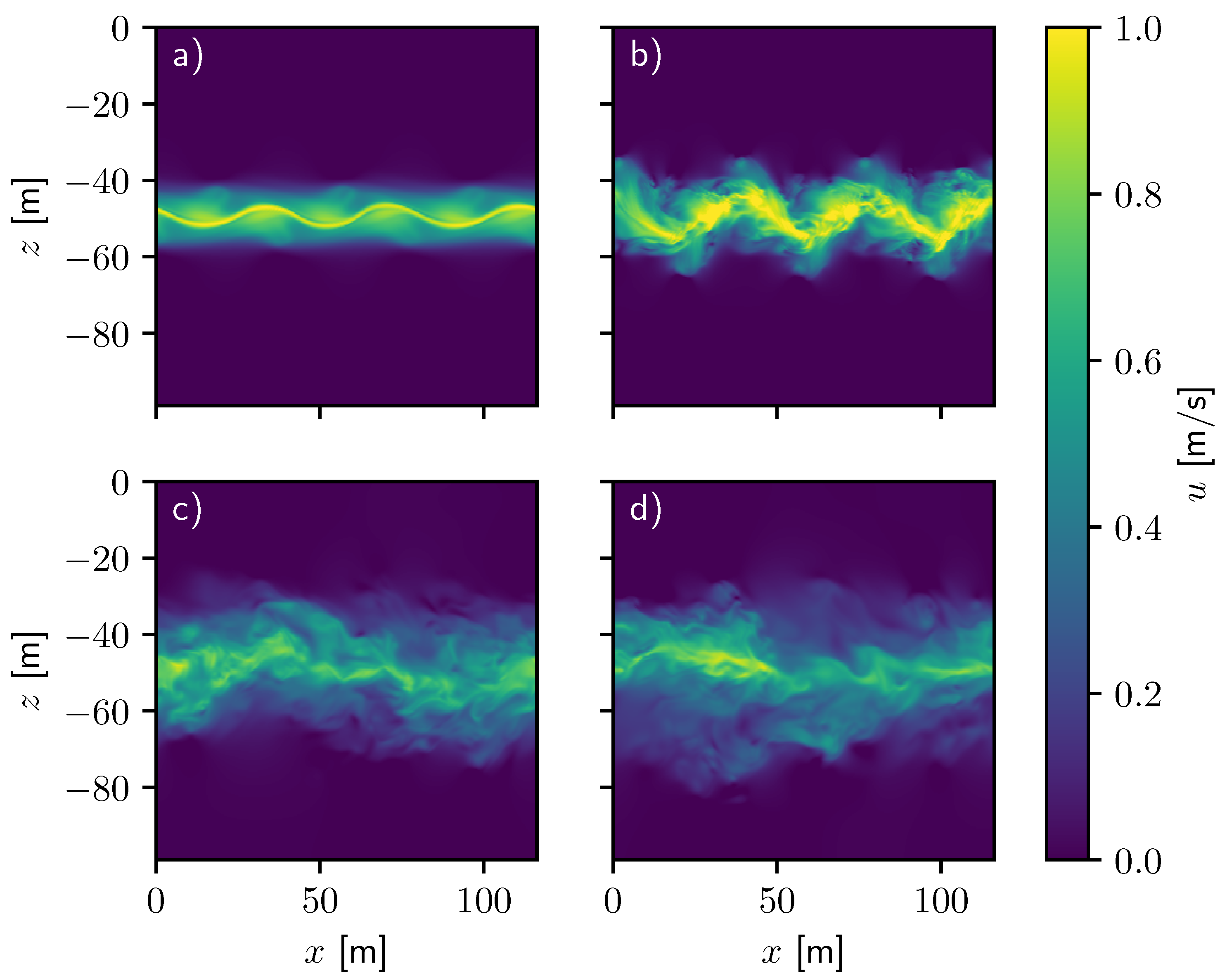
3. Results
Convolutional Neural Network Results
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Smagorinsky, J. General Circulation Experiments with the Primitive Equations. Mon. Weather. Rev. 1963, 91, 99. [Google Scholar] [CrossRef]
- Galperin, B.; Orszag, S.A. (Eds.) Large Eddy Simulation of Complex Engineering and Geophysical Flows; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar] [CrossRef]
- Canuto, V.M.; Cheng, Y. Determination of the Smagorinsky–Lilly constant CS. Phys. Fluids 1997, 9, 1368–1378. [Google Scholar] [CrossRef]
- Beck, A.; Kurz, M. A perspective on machine learning methods in turbulence modeling. GAMM-Mitteilungen 2021, 44. [Google Scholar] [CrossRef]
- Ling, J.; Templeton, J. Evaluation of machine learning algorithms for prediction of regions of high Reynolds averaged Navier Stokes uncertainty. Phys. Fluids 2015, 27, 085103. [Google Scholar] [CrossRef]
- Ma, M.; Lu, J.; Tryggvason, G. Using statistical learning to close two-fluid multiphase flow equations for a simple bubbly system. Phys. Fluids 2015, 27, 092101. [Google Scholar] [CrossRef]
- Parish, E.J.; Duraisamy, K. A paradigm for data-driven predictive modeling using field inversion and machine learning. J. Comput. Phys. 2016, 305, 758–774. [Google Scholar] [CrossRef] [Green Version]
- Gamahara, M.; Hattori, Y. Searching for turbulence models by artificial neural network. Phys. Rev. Fluids 2017, 2, 054604. [Google Scholar] [CrossRef]
- Vollant, A.; Balarac, G.; Corre, C. Subgrid-scale scalar flux modelling based on optimal estimation theory and machine-learning procedures. J. Turbul. 2017, 18, 1–25. [Google Scholar] [CrossRef]
- Wang, J.X.; Wu, J.L.; Xiao, H. Physics-informed machine learning approach for reconstructing Reynolds stress modeling discrepancies based on DNS data. Phys. Rev. Fluids 2017, 2, 034603. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.L.; Xiao, H.; Paterson, E. Physics-informed machine learning approach for augmenting turbulence models: A comprehensive framework. Phys. Rev. Fluids 2018, 3, 074602. [Google Scholar] [CrossRef] [Green Version]
- Duraisamy, K.; Iaccarino, G.; Xiao, H. Turbulence Modeling in the Age of Data. arXiv 2018, arXiv:1804.00183. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Z.; He, G.; Wang, S.; Jin, G. Subgrid-scale model for large-eddy simulation of isotropic turbulent flows using an artificial neural network. Comput. Fluids 2019, 195, 104319. [Google Scholar] [CrossRef] [Green Version]
- Dehnhardt, G.; Mauck, B.; Hanke, W.; Bleckmann, H. Hydrodynamic Trail-Following in Harbor Seals (Phoca vitulina). Science 2001, 293, 102–104. [Google Scholar] [CrossRef] [PubMed]
- Colvert, B.; Alsalman, M.; Kanso, E. Classifying vortex wakes using neural networks. Bioinspir. Biomin. 2018, 13, 025003. [Google Scholar] [CrossRef] [Green Version]
- Alsalman, M.; Colvert, B.; Kanso, E. Training bioinspired sensors to classify flows. Bioinspir. Biomin. 2019, 14, 016009. [Google Scholar] [CrossRef]
- Li, B.; Yang, Z.; Zhang, X.; He, G.; Deng, B.Q.; Shen, L. Using machine learning to detect the turbulent region in flow past a circular cylinder. J. Fluid Mech. 2020, 905, A10. [Google Scholar] [CrossRef]
- Marshall, J.; Adcroft, A.; Hill, C.; Perelman, L.; Heisey, C. A finite-volume, incompressible Navier Stokes model for studies of the ocean on parallel computers. J. Geophys. Res. Ocean. 1997, 102, 5753–5766. [Google Scholar] [CrossRef] [Green Version]
- Adcroft, A. Numerical Algorithms for use in a Dynamical Model of the Ocean. Ph.D Thesis, Imperial College, London, UK, 1995. [Google Scholar]
- Moody, Z.E.; Merriam, C.J.; Radko, T.; Joseph, J. On the structure and dynamics of stratified wakes generated by submerged propagating objects. J. Oper. Oceanogr. 2017, 45, 1–14. [Google Scholar] [CrossRef]
- Chandar, D.D. On overset interpolation strategies and conservation on unstructured grids in OpenFOAM. Comput. Phys. Commun. 2019, 239, 72–83. [Google Scholar] [CrossRef]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow v2.9.0-rc2. Zenodo, Genève, Switzerland. 2022. Available online: https://doi.org/10.5281/zenodo.6519082 (accessed on 7 July 2022).
- Beck, A.; Flad, D.; Munz, C.D. Deep neural networks for data-driven LES closure models. J. Comput. Phys. 2019, 398, 108910. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Lee, C. Prediction of turbulent heat transfer using convolutional neural networks. J. Fluid Mech. 2020, 882, A18. [Google Scholar] [CrossRef]
- Manucharyan, G.E.; Siegelman, L.; Klein, P. A Deep Learning Approach to Spatiotemporal Sea Surface Height Interpolation and Estimation of Deep Currents in Geostrophic Ocean Turbulence. J. Adv. Model. Earth Syst. 2021, 13, e2019MS001965. [Google Scholar] [CrossRef]
- Ioffe, S.; Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. In Proceedings of the 32nd International Conference on Machine Learning, JMLR: W&CP, Lille, France, 7–9 July 2015; Volume 37, pp. 448–456. [Google Scholar]
- Bisset, D.K.; Hunt, J.C.R.; Rogers, M.M. The turbulent/non-turbulent interface bounding a far wake. J. Fluid Mech. 2002, 451, 383–410. [Google Scholar] [CrossRef] [Green Version]
- Mathew, J.; Basu, A.J. Some characteristics of entrainment at a cylindrical turbulence boundary. Phys. Fluids 2002, 14, 2065–2072. [Google Scholar] [CrossRef]
- Westerweel, J.; Fukushima, C.; Pedersen, J.M.; Hunt, J.C.R. Mechanics of the Turbulent-Nonturbulent Interface of a Jet. Phys. Rev. Lett. 2005, 95, 174501. [Google Scholar] [CrossRef] [Green Version]
- Selvaraju, R.R.; Cogswell, M.; Das, A.; Vedantam, R.; Parikh, D.; Batra, D. Grad-CAM: Visual Explanations from Deep Networks via Gradient-Based Localization. Int. J. Comput. Vis. 2020, 128, 336–359. [Google Scholar] [CrossRef] [Green Version]
- Laurent, L.S.; Schmitt, R.W. The Contribution of Salt Fingers to Vertical Mixing in the North Atlantic Tracer Release Experiment. J. Phys. Oceanogr. 1999, 29, 1404–1424. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Wake | Jet | Convection |
|---|---|---|---|
| Viscosity () | |||
| Thermal diffusivity () | |||
| Thermal expansion coefficient () | |||
| Domain length in x () | 938.7 m | 117 m | 117 m |
| Domain length in y () | 100 m | 100 m | 100 m |
| Domain length in z () | 100 m | 100 m | 100 m |
| − | 1 m/s | − | |
| − | − | 7 m °C | |
| 5 m | 5 m | 5 m |
| Case | |||
|---|---|---|---|
| Moving Object | 3 m/s | 10 s | 400 m |
| Moving Object | 5 m/s | 10 s | 33 m |
| Moving Object | 7 m/s | 10 s | 150 m |
| Jet | - | 10 s | 10 m |
| Convection | - | 10 s | 10 m |
| Pred. | No Turbulence | Convection | Jet | Wake | Total Correct | |
|---|---|---|---|---|---|---|
| True | ||||||
| N | 2501 | 84 | 64 | 207 | 87.6% | |
| C | 0 | 2700 | 135 | 6 | 95.0% | |
| J | 38 | 295 | 2430 | 129 | 84.0% | |
| W | 326 | 68 | 239 | 2109 | 76.9% | |
| Total Correct | 87.3% | 85.8% | 84.7% | 86.0% | 86.0% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brown, J.; Zimny, J.; Radko, T. Identifying the Origin of Turbulence Using Convolutional Neural Networks. Fluids 2022, 7, 239. https://doi.org/10.3390/fluids7070239
Brown J, Zimny J, Radko T. Identifying the Origin of Turbulence Using Convolutional Neural Networks. Fluids. 2022; 7(7):239. https://doi.org/10.3390/fluids7070239
Chicago/Turabian StyleBrown, Justin, Jacqueline Zimny, and Timour Radko. 2022. "Identifying the Origin of Turbulence Using Convolutional Neural Networks" Fluids 7, no. 7: 239. https://doi.org/10.3390/fluids7070239
APA StyleBrown, J., Zimny, J., & Radko, T. (2022). Identifying the Origin of Turbulence Using Convolutional Neural Networks. Fluids, 7(7), 239. https://doi.org/10.3390/fluids7070239