In this section we discuss two alternative sets of Clebsch variables for compressible nonhomogeneous fluids. Taking the compressibility of the fluid into account has the advantage that the thermodynamical conjugate of the pressure (namely the volume) can be represented by a canonical variable (in our case the normalized inverse volume). We first note that the state equation for the pressure in water can be approximated as a function of the ratio of the actual mass density
and the mass density
of the same fluid parcel at a reference pressure. For example, refs. [
26,
27,
28] discuss a variety of approximate equations of state for the pressure such as
with
,
K is the bulk modulus and
is the mass density at atmospheric pressure
.
equals the normalized inverse volume
of a fluid parcel that has a reference volume
at
. While
and
depend on the entropy and the concentration of any solutes, the state equation for
depends on these variables only weakly [
26,
28] within a range that is relevant e.g., in internal waves. This suggests to use
as a dynamical variable. The pressure can then be derived from an internal energy density
. We introduce this approach in
Section 2.1 and use it in particular in
Section 3.
A dependence of the state equation on the entropy per mass
s and solute mass percentage
c may be taken into account either by starting from an internal energy density
or alternatively from
. In the latter case the pressure differential
depends on these three variables, and these variables may be used as dynamical Clebsch variables. We discuss this approach in
Section 2.2.
2.1. Clebsch Variables for a State Equation
We introduce a set of three Clebsch variables [
3] for an inviscid, compressible, and diffusionless rotating fluid with an inhomogeneous solute concentration in a homogeneous gravity field and discuss their relation to Ertel’s potential vorticity [
29]. We assume that the fluid compressibility is a function of the pressure only with no explicit dependence on the salinity or entropy. Let
V be the actual volume of a small fluid parcel at the pressure
P, and
be the volume of the parcel at a fixed reference pressure
. The mass density
is governed by continuity equation
. The mass density at the reference pressure
is again denoted as
. This quantity is in general a function of any solute mass percentages and the entropy per mass, and it is materially conserved, i.e.,
. The Euler equations for this system are
To exploit the state equation of the form
we introduce the normalized inverse volume of the fluid parcel
with
, which is governed by the continuity equation
. We use
and
as independent variables. The pressure gradient follows from an internal energy per volume (written as as a function of
using
) as
with
Note that
may be influenced by the entropy per mass as well as any solutes of the fluid; it is only required that the compressibility can be expressed as a function of
only. The equations of motion and the Hamilton function can be obtained from the variation of the action that is constrained by the conservation laws [
3,
6,
7,
8]. The constrained action is
where
is the Lagrangian density with the kinetic energy density
and the potential energy density
is a vector potential for the Coriolis force.
,
,
are Lagrange multipliers of the continuity equation for
and the advection equations of
and
.
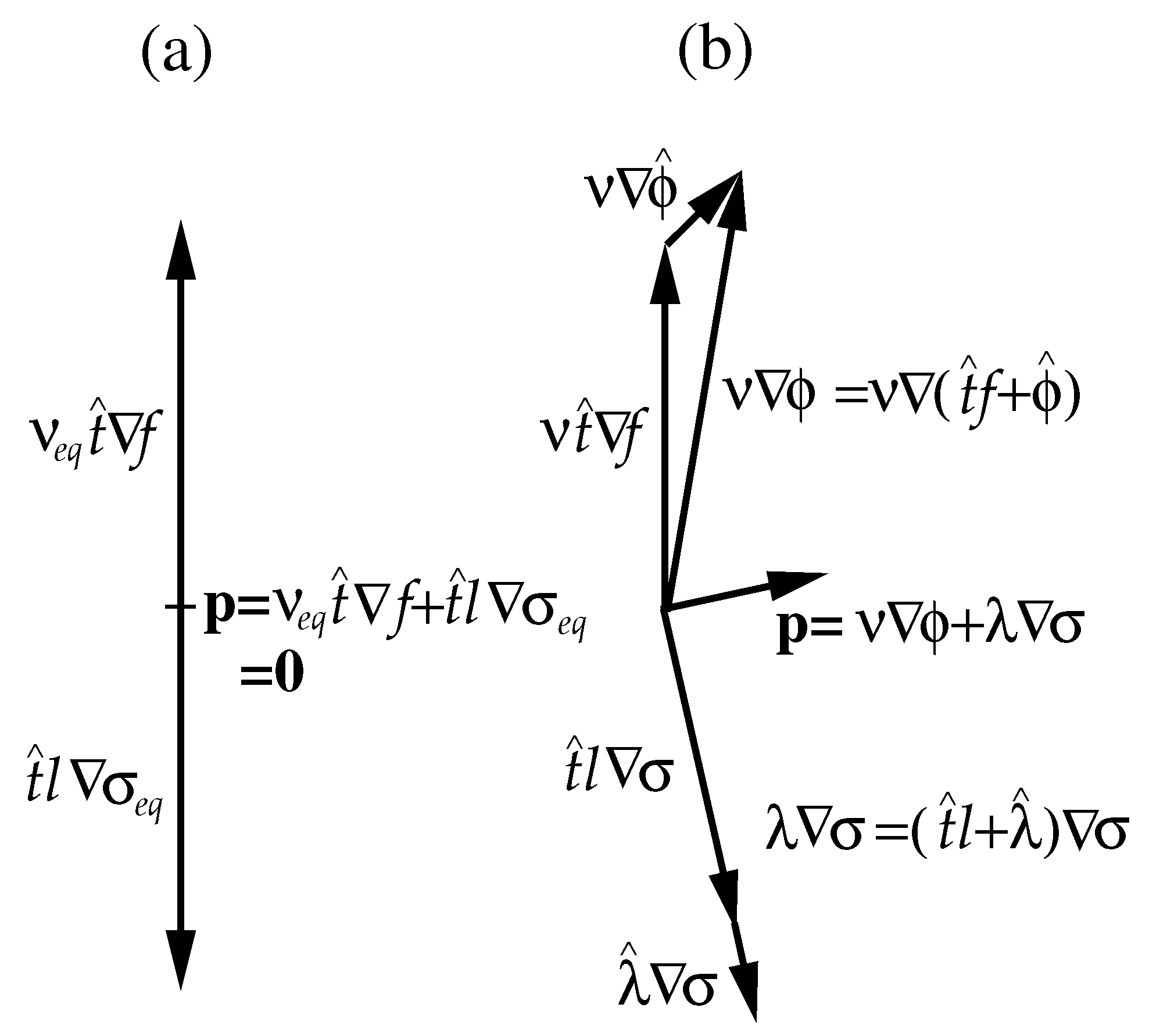
may be a formal fluid particle label, or (as discussed below) it may be identified with the potential vorticity. Applying Hamilton’s principle to Equation (
2), the
-variation yields (
Figure 1)
Variations of the multipliers
,
,
and the variables
,
,
give the equations of motion
with
Equation (
4) is equivalent to the canonical equations
and
for
and
for the Hamiltonian
The velocity
in Equation (
5) is expressed as the function (
3) of the Clebsch variables, while it is an independent variable in the variation of Equation (
2). The canonical momentum density is
, the kinetic momentum density is
.
Expressing
by Equation (
4) yields the Euler equation
after a straightforward calculation.
is the angular velocity of the Coriolis force, e.g., the vector potential
yields
. A Hamiltonian formalism for inertial waves in rotating fluids was introduced in [
15].
We observe that a stationary state of the Euler Equation (
6) is not a stationary state of the Clebsch variables Equation (
4): a stratified equilibrium state
,
,
of the Euler equation satisfies
The variables
and
grow at constant rates
and
by Equation (
4) for the stationary state of the fluid. These equations together with
are canonical equations for a Hamiltonian with no kinetic energy.
For the limit of an incompressible fluid
,
,
diverges and
are not a pair of canonical variables. In this case the potential
in
needs to be determined from
and the boundary conditions [
15,
19].
The conservation of potential vorticity follows directly from the conservation laws of Clebsch variables. The Jacobian determinant of the three materially conserved quantities
,
,
is a locally conserved density, i.e., it is governed by the continuity equation
With
being another locally conserved quantity, we note that the ratio of
and
is materially conserved; this yields Ertel’s potential vorticity conservation [
29]
We note that
or
yields a zero potential vorticity which again shows that two pairs of Clebsch variables are insufficient for a general velocity field. The potential vorticity conservation is associated with the relabeling symmetry [
6,
7,
8,
9,
10], which is, in this case, the invariance of the Hamiltonian under displacements of the fluid on surfaces with constant
while keeping
unchanged. Both
and the potential vorticity are materially conserved; this suggests to represent the potential vorticity by the variable
: setting the initial condition of
as
ensures that
matches the potential vorticity throughout the time evolution.
can be used for other purposes depending on the type of fluid. It can represent an additional materially conserved quantity of the fluid, e.g., the entropy per mass or a solute mass percentage. In this case, the potential energy depends on so that is not governed by a continuity equation. Correspondingly, and the potential vorticity are not materially conserved in this case. This reflects that the Hamiltonian of such a system is in general not invariant under continuous displacements of fluid particles on surfaces : such displacements change the entropy distribution of the fluid unless the surfaces coincide with surfaces
2.2. Clebsch Variables for More General State Equations
We now give a generalization for fluids whose compressibility depends also on the entropy per mass
and the mass percentage (mass of a solute per mass of the fluid)
. The internal energy per volume is
. With
being locally conserved and
s and
c being materially conserved, the Euler equations are
The pressure gradient is
The constrained action becomes
with
,
and the potential energy density
,
,
are now Lagrange multipliers of the continuity equation for
and the advection equations of
and
. The
-variation yields
Variations of the multipliers
,
,
and the variables
,
s,
c give the equations of motion
These equations together with Equation (
12) again yield the Euler Equation (
10) for an internal energy
. It is straightforward to extend this to several solute mass percentages
, each of which will be governed by an advection equation. Each solute will require one new pair of Clebsch variables
in the definition of the momentum, which then involves more Clebsch variables than needed for representing an arbitrary velocity field. These contributions may be neutralized with respect to the initial conditions by setting the scalar factor fields
equal to zero initially.
A fundamental difference between Equations (
4) and (
13) is that
is not locally conserved in Equation (
13), so
is not materially conserved. Fluid particles with different values of
s and
c are physically distinguishable, and Ertel’s potential vorticity (Equation (
9)) is not conserved. Describing fluids whose pressure depends only on
with Equation (
13) is possible, but unnecessarily complicated. In contrast to this, the description (
4) can be reduced to only four Clebsch variables for certain initial conditions, which is not possible for Equation (
13). We will take advantage of that in
Section 3.
2.3. Computing Clebsch Variables from the Initial Conditions: One Auxiliary Pair of Clebsch Variables
While it is desirable to construct the Clebsch variables from the momentum field
(e.g., for determining the initial conditions of the Clebsch variables), there are some difficulties in this step. Evidently the Clebsch variables (
4) are not uniquely determined by the momentum density, for example
is invariant under canonical gauge transformations like
,
,
,
. We now consider the optimal situation where the vectors
,
,
are linearly independent everywhere in space. For the given trihedron
the set of coefficients
can be determined directly and uniquely in order to adjust
to a given momentum field (
Figure 1). However, the coefficient
is a physical property of the fluid that is determined by its own initial condition, so
is not available as an arbitrary parameter for representing a particular momentum field. Instead, it is the leg
that is arbitrary and therefore available for adjusting to the momentum density. This leaves us with the much harder task of finding a potential
that represents an arbitrary vector field
as
. A trivial example may illustrate this difficulty: the initial conditions of the momentum field may be given by
with
,
. Clebsch variables that yield this field are e.g.,
,
,
,
,
. However, the initial condition
will in general be an arbitrary function, so it is necessary to solve
for
,
,
,
.
This problem can be circumvented with additional (and redundant) Clebsch variables: introducing a fourth pair of variables
,
and defining the momentum as
allows us to construct all Clebsch variables explicitly. The variables
and
are multipliers and fluid labels in Hamilton’s principle that are governed by the canonical equations
In other words,
is an additional passive tracer with no influence on the dynamics of
. Computing
confirms that the projection (
14) reduces the dynamics of four pairs of Clebsch variables to the Euler equation. The initial conditions of these Clebsch variables may be expressed explicitly in terms of the initial conditions of the momentum density. We give two approaches for constructing the initial conditions.
A first way is to set
and
, which leads to the initial momentum density
at (
). This switches the term
to
at
, so that
is now an adjustable scalar coefficient of the gradient field
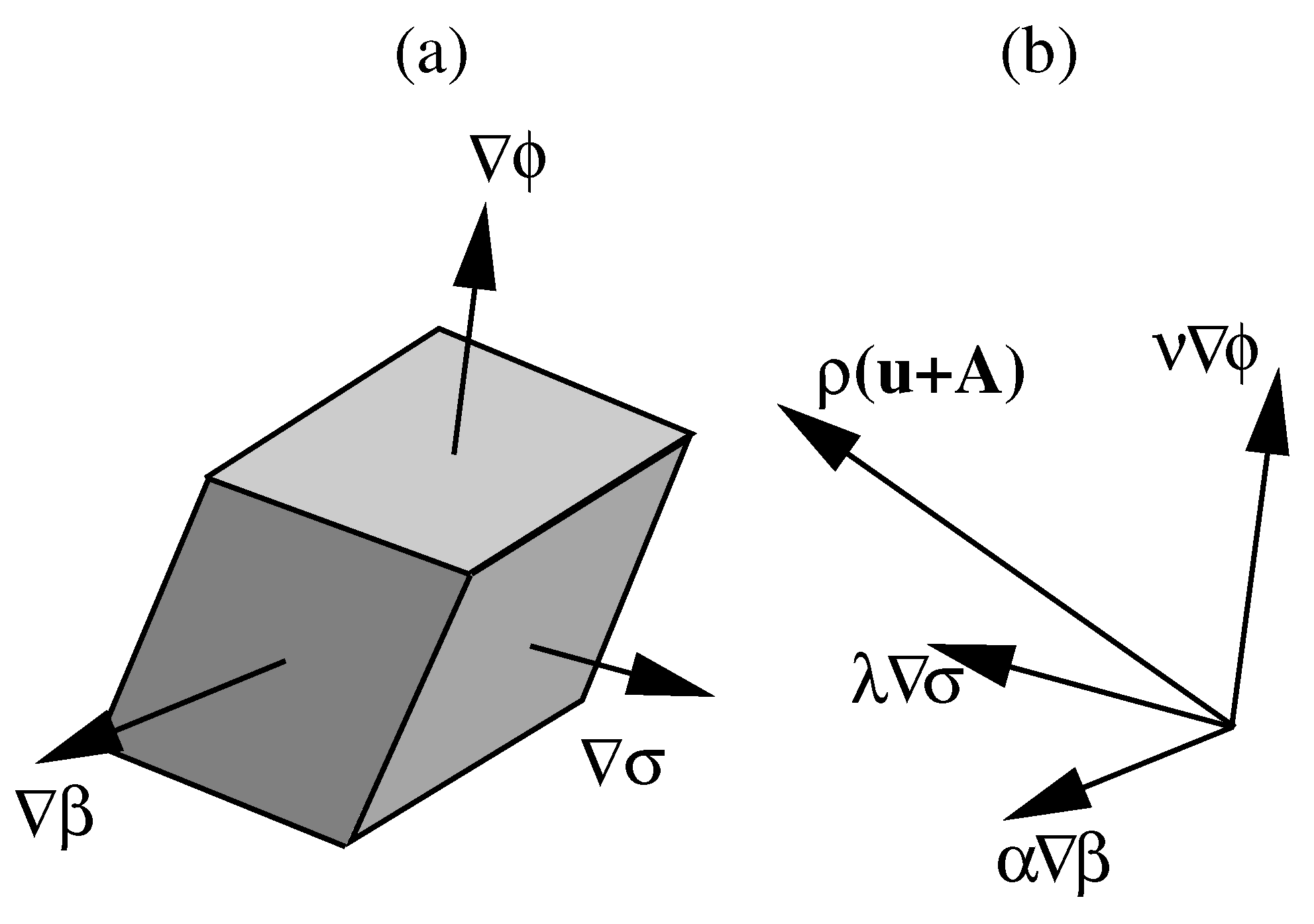
. If the three gradients
,
,
are linearly independent everywhere in space, the coefficient
may be computed directly as
Similar projections yield
and
. The materially conserved variables
and
may be combined into new conserved quantities, for example
is locally conserved. In analogy to Equation (
9), the potential vorticity is now
Again, we may identify with the potential vorticity via the initial conditions so that the vectors at have a clear physical meaning. A limitation of this approach is that , , and can represent an arbitrary velocity field only if they are linearly independent everywhere in space.
A second way of constructing the initial conditions is to set
at
.
,
are chosen in a way that
,
,
are linearly independent everywhere. For a stratified fluid with
, the choice
,
yields
and
. An alternative is to define
as tangent vectors on surfaces
. The coefficients
,
,
are computed in analogy to Equation (
16). This requires again that
is nonzero, but it can be applied to initial conditions where
and
are linearly dependent.
2.4. Two Auxiliary Pairs of Clebsch Variables
A versatile representation of the momentum density field using five pairs of Clebsch variables is
In Hamilton’s principle this merely extends the number of constraints that are governed by Equation (
15), the remaining Equation (
4) is changed only by the definition of the momentum (
18). Again it is straightforward to check that these equations lead to the Euler Equation (
6). Initial conditions of these Clebsch variables can be expressed explicitly in terms of the initial conditions of the momentum field:
,
lead to
. The initial conditions
are the initial Cartesian coordinates of fluid parcels;
,
,
is a standard basis at
. The variables
are the Cartesian components of the initial momenta at
. The advantage of this representation is that it can be used for any initial conditions, in particular,
and
may be parallel or zero. The simplicity of the initial conditions is traded for additional Clebsch variables that are governed by continuity and advection equations.
The additional variables are redundant in the sense that they are not necessary for representing an arbitrary vector field. It has been shown in [
5] that an arbitrary vector field in three dimensions can be represented with two pairs of Clebsch variables plus one gradient field, e.g., dividing Equation (
14) by
and dropping
the representation
is possible. The Clebsch variables are not uniquely defined in this representation. If the boundary conditions of the Clebsch variables need to be controlled, an additional pair of Clebsch variables
) is required [
5].




{kind=link}
{kind=link}