
The Influence of Exit Nozzle Geometry on Sweeping Jet Actuator Performance



Abstract
:
1. Introduction
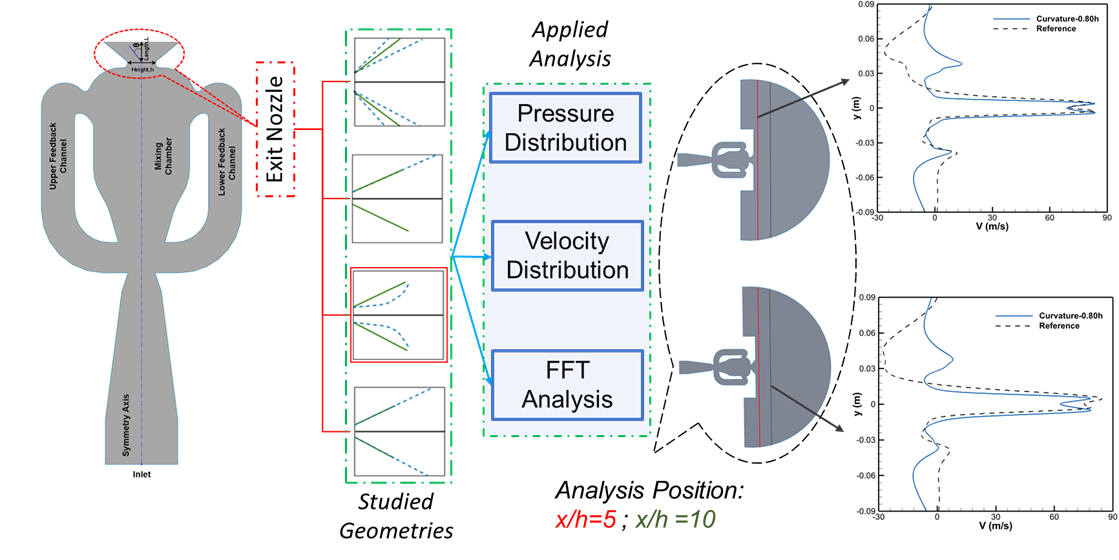
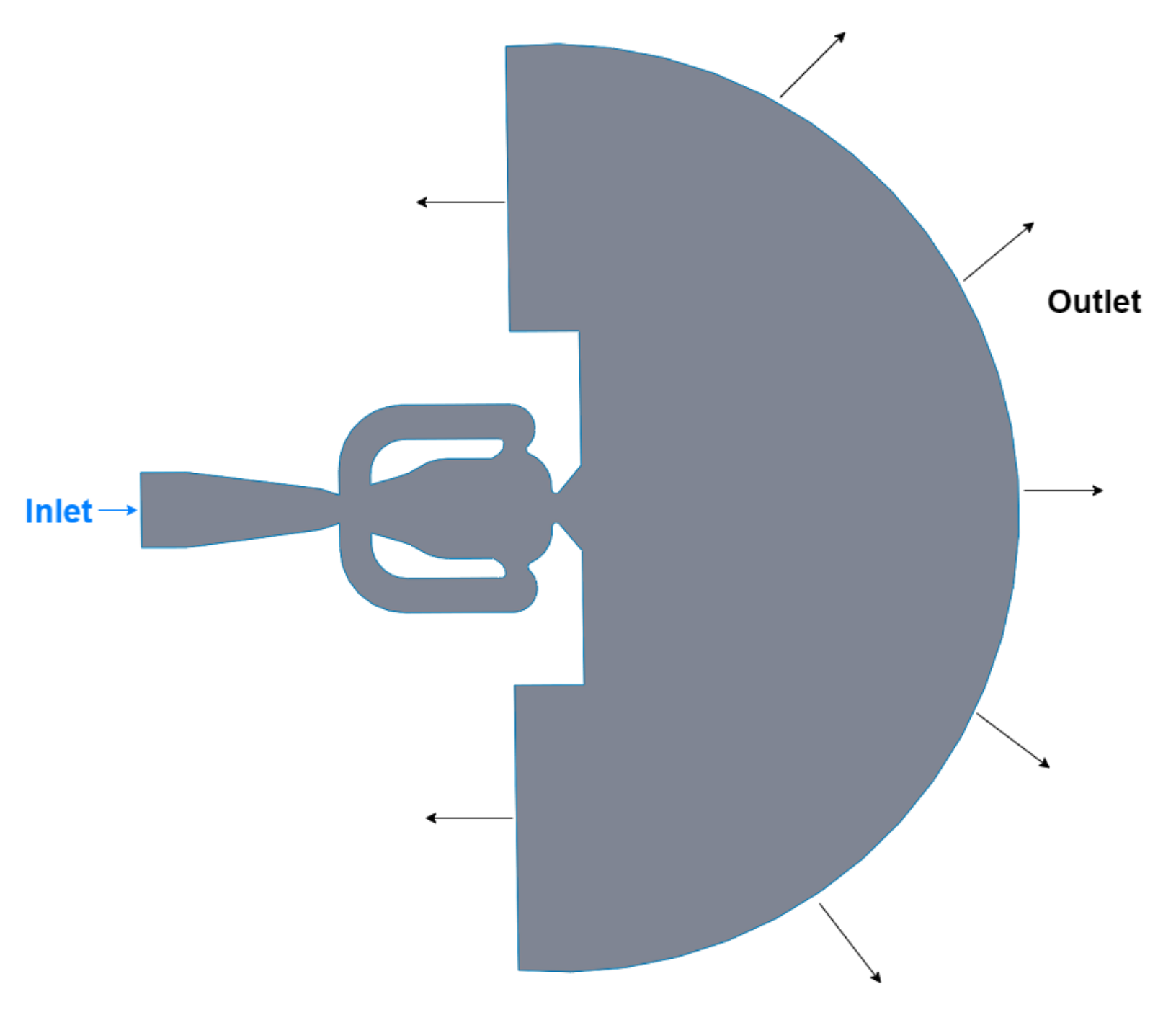
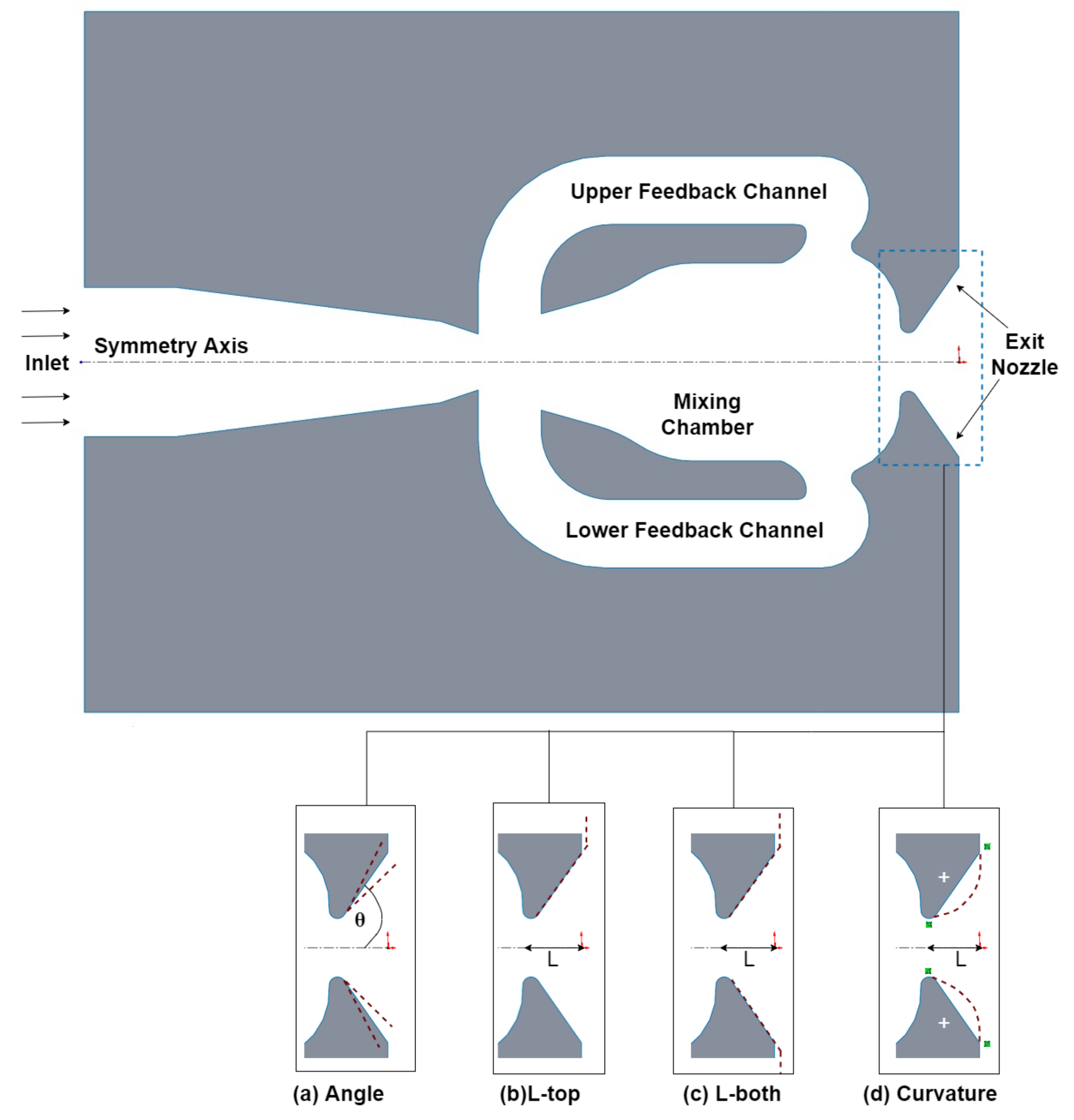
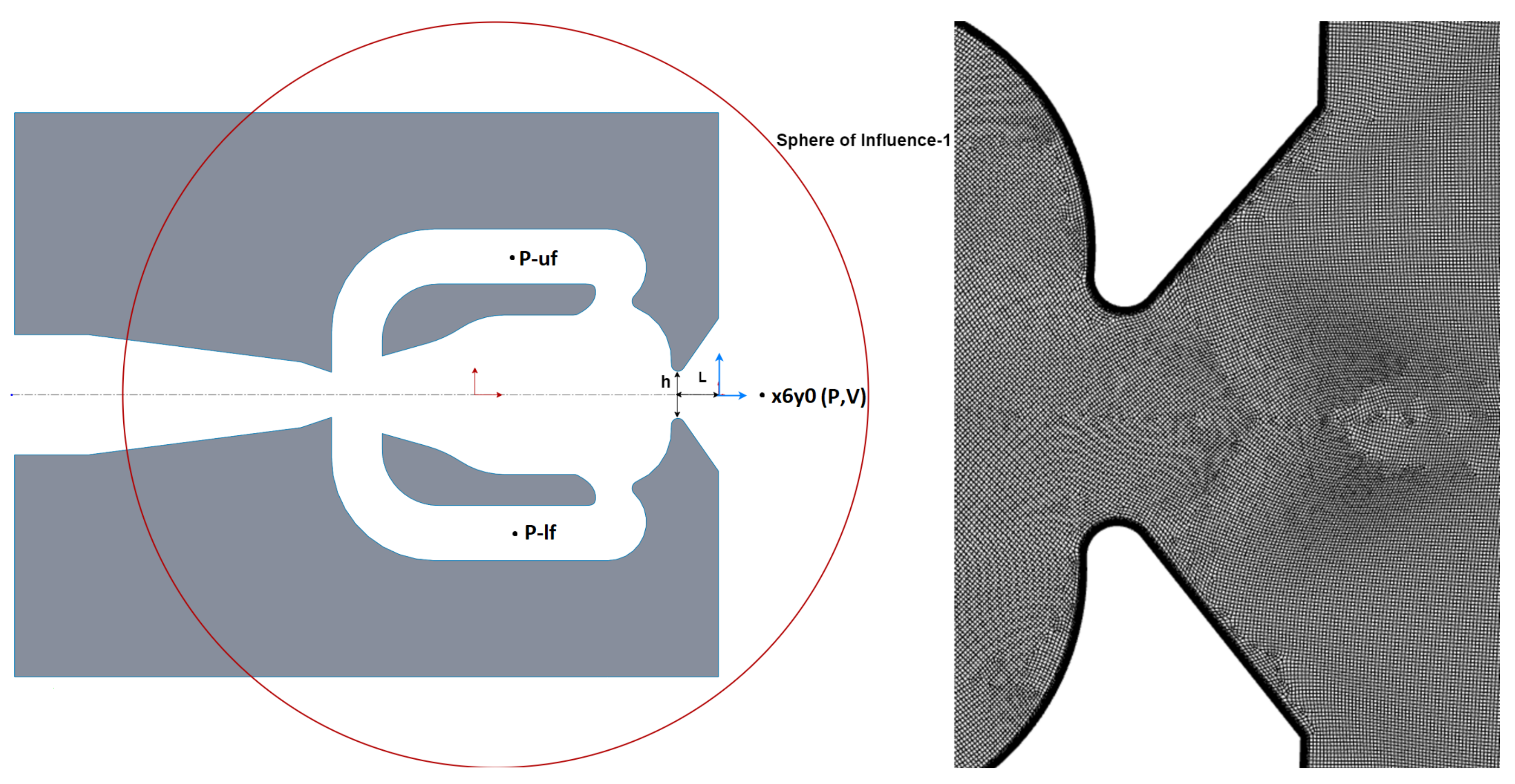
2. Numerical Setup and Geometric Details
3. Governing Equations
Computational Fluid Dynamics Model
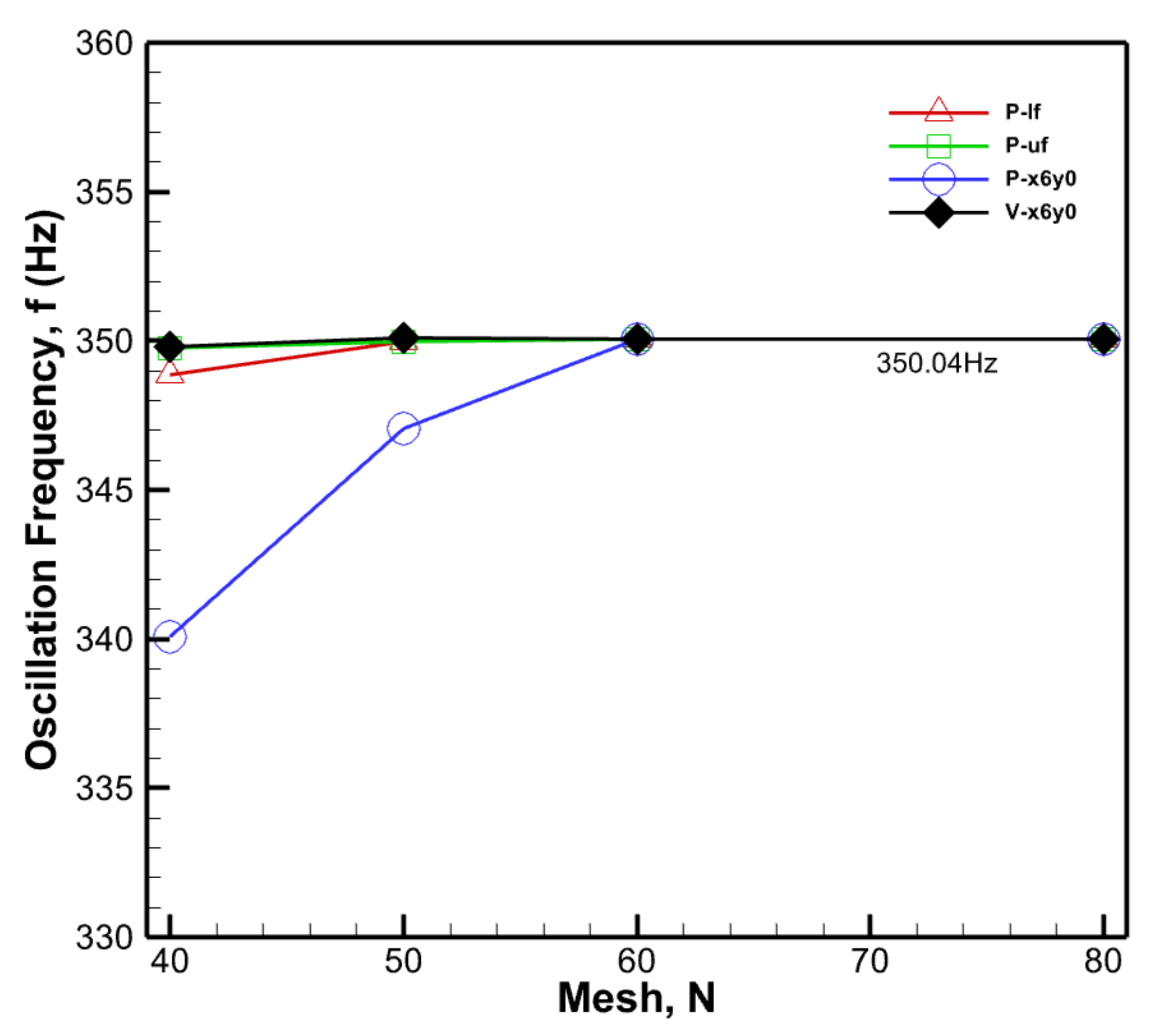
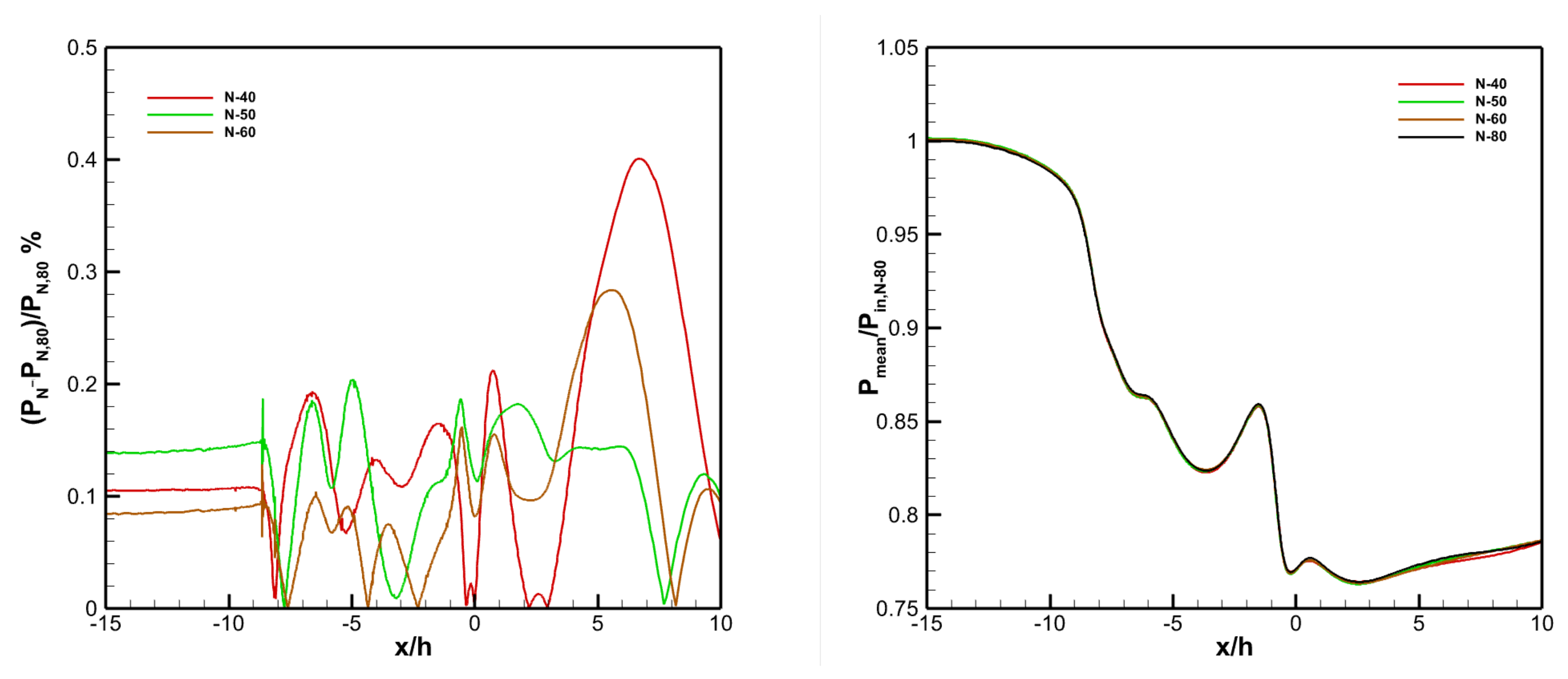
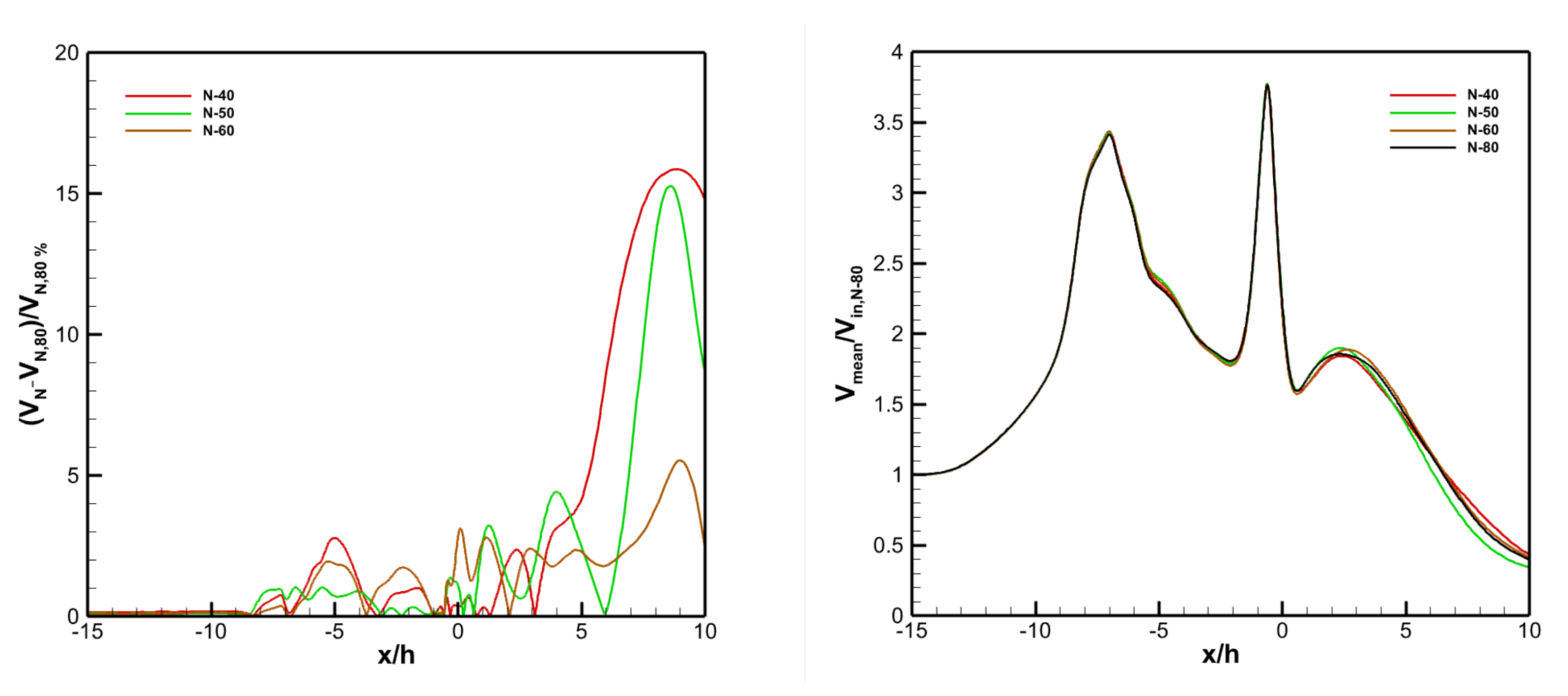
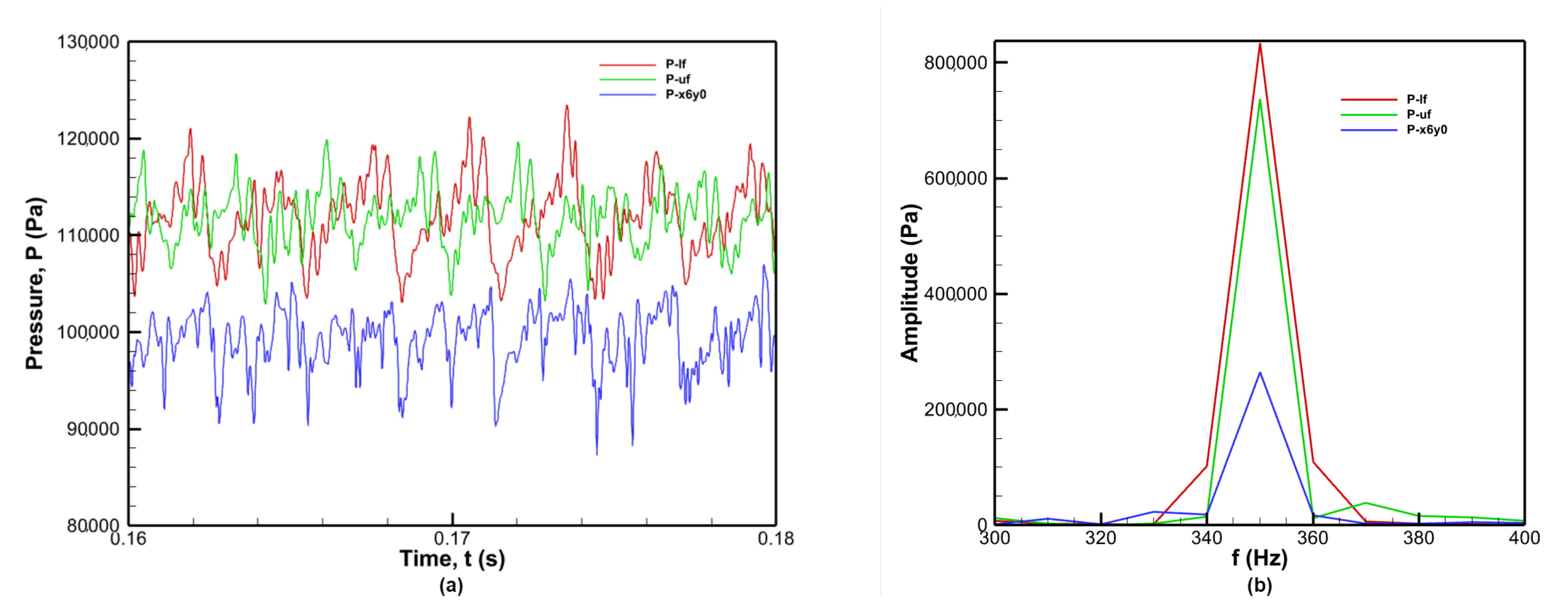
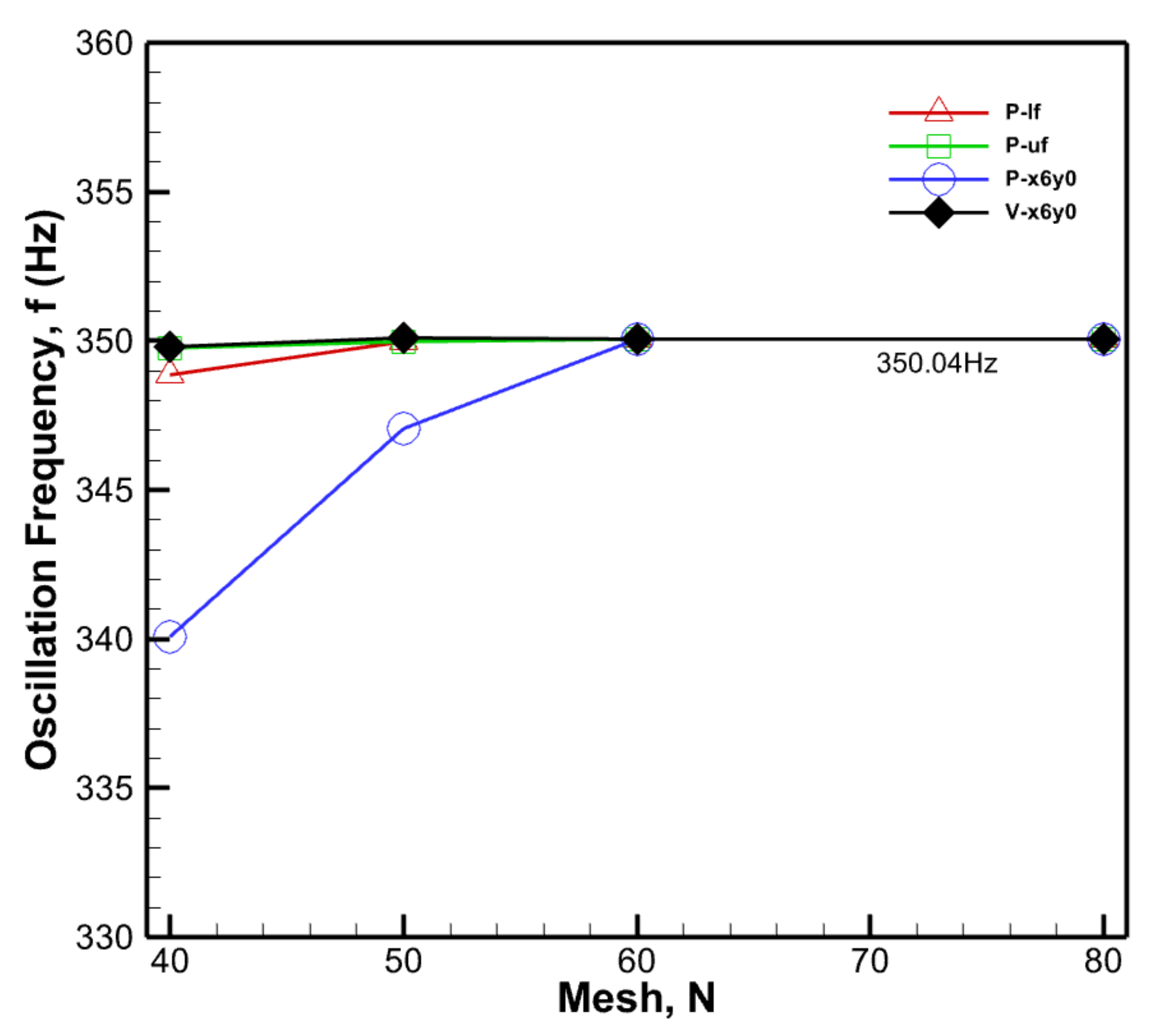
4. Mesh Independence Test
5. Model Validation and Verification
6. Results and Discussion
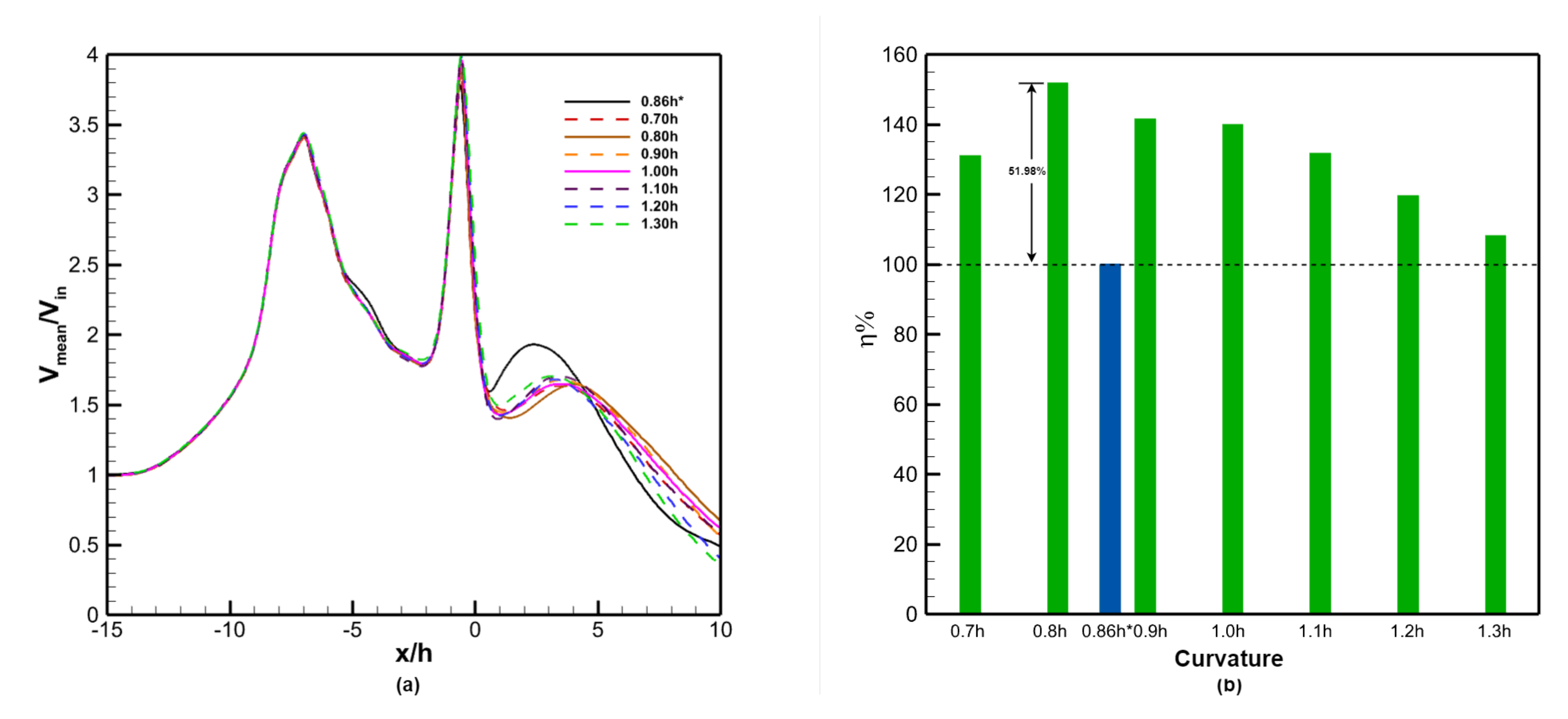
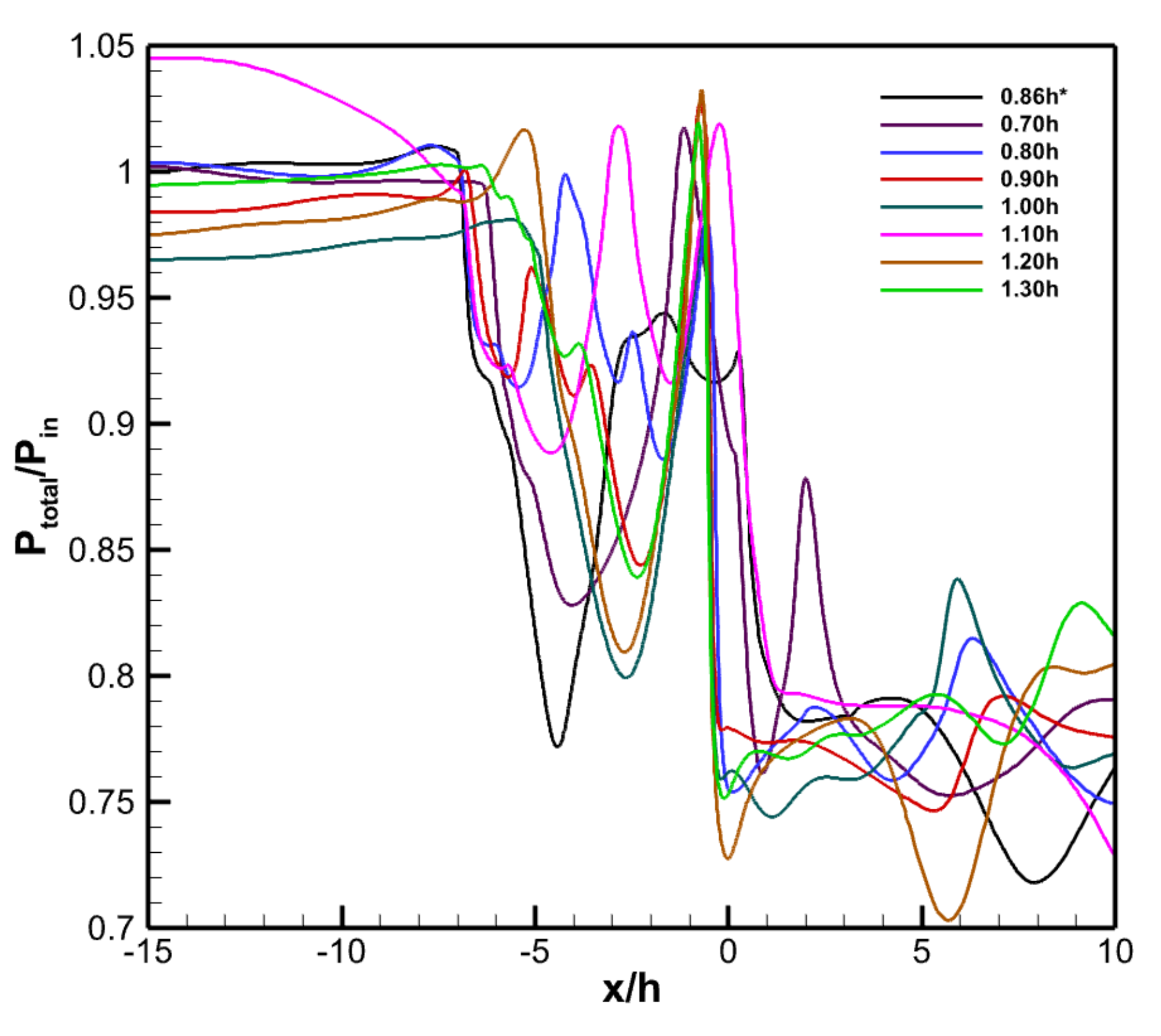
6.1. Effect of Curvature
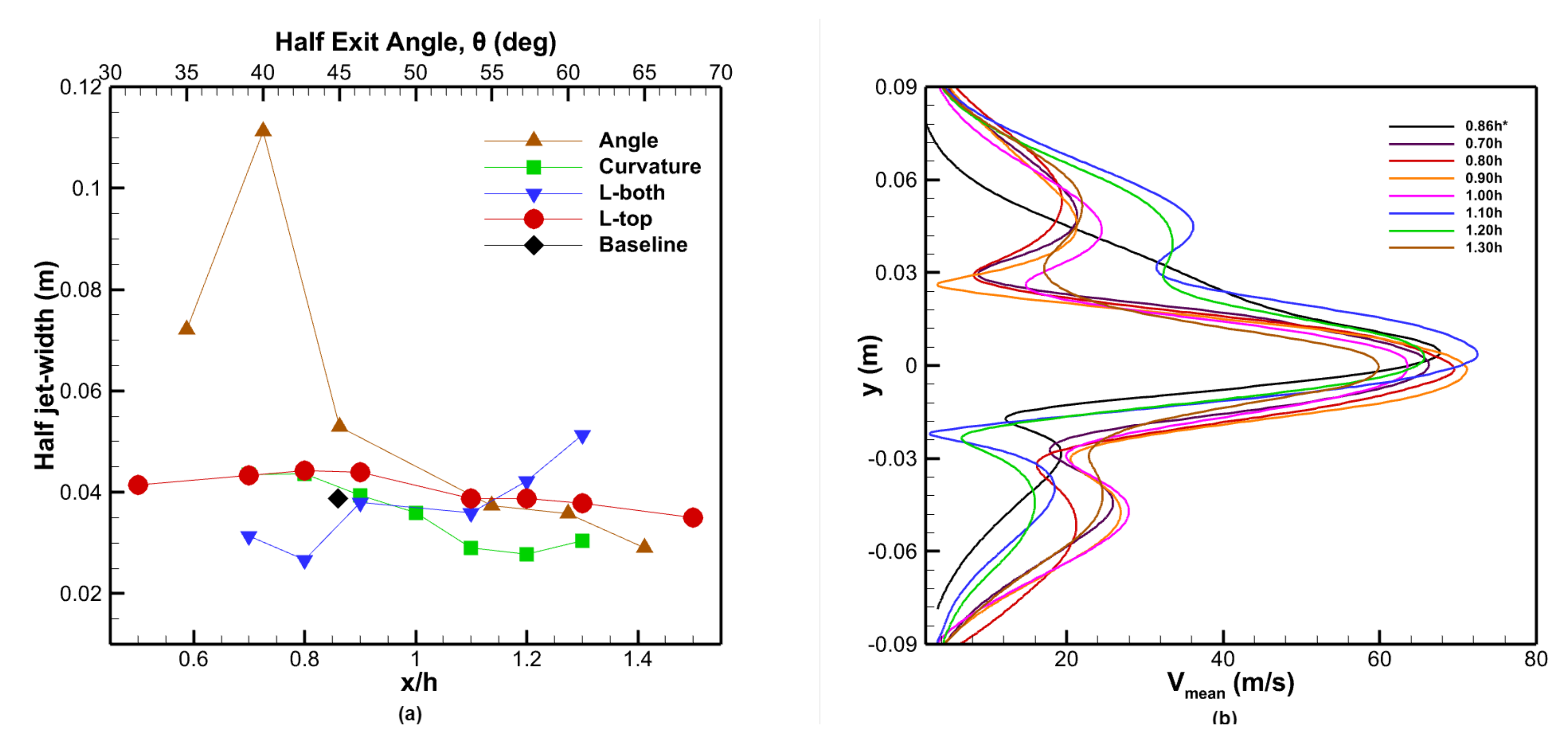
6.2. Effect of Exit Nozzle Angle
6.3. Effect of Length: Both Nozzle Arms
6.4. Effect of Length: Top Nozzle Arm (Asymmetry)
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cattafesta, L.N., III; Sheplak, M. Actuators for active flow control. Annu. Rev. Fluid Mech. 2011, 43, 247–272. [Google Scholar] [CrossRef] [Green Version]
- Tomac, M.N.; Gregory, J. Frequency studies and scaling effects of jet interaction in a feedback-free fluidic oscillator. In Proceedings of the 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Tennessee, TN, USA, 9–12 January 2012; p. 1248. [Google Scholar]
- Tomac, M.N.; Gregory, J. Jet interactions in a feedback-free fluidic oscillator at low flow rate. In Proceedings of the 43rd AIAA Fluid Dynamics Conference, San Jose, CA, USA, 14–17 July 2013; p. 2478. [Google Scholar]
- Raghu, S. Fluidic oscillators for flow control. Exp. Fluids 2013, 54, 1455. [Google Scholar] [CrossRef]
- Kara, K.; Kim, D.; Morris, P.J. Flow-separation control using sweeping jet actuator. AIAA J. 2018, 56, 4604–4613. [Google Scholar] [CrossRef]
- Kara, K. Numerical simulation of a sweeping jet actuator. In Proceedings of the 34th AIAA Applied Aerodynamics Conference, Dallas, DC, USA, 22 June 2015; p. 3261. [Google Scholar]
- Oz, F.; Kara, K. Jet Oscillation Frequency Characterization of a Sweeping Jet Actuator. Fluids 2020, 5, 72. [Google Scholar] [CrossRef]
- Kara, K. Numerical study of internal flow structures in a sweeping jet actuator. In Proceedings of the 33rd AIAA Applied Aerodynamics Conference, Atlanta, GA, USA, 16–20 June 2015; p. 2424. [Google Scholar]
- Koklu, M. Effect of a Coanda extension on the performance of a sweeping-jet actuator. AIAA J. 2016, 54, 1131–1134. [Google Scholar] [CrossRef]
- Koklu, M. Effects of sweeping jet actuator parameters on flow separation control. AIAA J. 2018, 56, 100–110. [Google Scholar] [CrossRef] [PubMed]
- Aram, S.; Shan, H. Computational analysis of interaction of a sweeping jet with an attached crossflow. AIAA J. 2019, 57, 682–695. [Google Scholar] [CrossRef]
- Bohan, B.T.; Polanka, M.D. The Effect of Scale and Working Fluid on Sweeping Jet Frequency and Oscillation Angle. J. Fluids Eng. 2020, 142, 061206. [Google Scholar] [CrossRef]
- Hirsch, D.; Gharib, M. Schlieren visualization and analysis of sweeping jet actuator dynamics. AIAA J. 2018, 56, 2947–2960. [Google Scholar] [CrossRef]
- Ott, C.; Gallas, Q.; Delva, J.; Lippert, M.; Keirsbulck, L. High frequency characterization of a sweeping jet actuator. Sens. Actuators A Phys. 2019, 291, 39–47. [Google Scholar] [CrossRef] [Green Version]
- Jeong, H.S.; Kim, K.Y. Shape optimization of a feedback-channel fluidic oscillator. Eng. Appl. Comput. Fluid Mech. 2018, 12, 169–181. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.C.; Whalen, E.A.; Andino, M.Y.; Graff, E.C.; Lacy, D.S.; Washburn, A.E.; Gharib, M.; Wygnanski, I.J. Full-Scale Testing of Active Flow Control Applied to a Vertical Tail. J. Aircr. 2019, 56, 1376–1386. [Google Scholar] [CrossRef]
- Park, T.; Kara, K.; Kim, D. Flow structure and heat transfer of a sweeping jet impinging on a flat wall. Int. J. Heat Mass Transf. 2018, 124, 920–928. [Google Scholar] [CrossRef]
- Pack Melton, L.G.; Lin, J.C.; Hannon, J.; Koklu, M.; Andino, M.; Paschal, K.B. Sweeping Jet Flow Control on the Simplified High-Lift Version of the Common Research Model. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019; p. 3726. [Google Scholar]
- Ostermann, F.; Woszidlo, R.; Nayeri, C.; Paschereit, C. Interaction Between a Crossflow and a Spatially Oscillating Jet at Various Angles. AIAA J. 2020, 58, 2450–2461. [Google Scholar] [CrossRef]
- Park, S.; Ko, H.; Kang, M.; Lee, Y. Characteristics of a Supersonic Fluidic Oscillator Using Design of Experiment. AIAA J. 2020, 58, 2784–2789. [Google Scholar] [CrossRef]
- Wilcox, D.C. Turbulence Modeling for CFD; DCW Industries: La Canada, CA, USA, 1998; Volume 2. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- Ansys®Fluent, Release 2020 R1, User Guide; ANSYS, Inc.: Canonsburg, PA, USA, 2021.
- Slupski, B.J.; Tajik, A.R.; Parezanović, V.B.; Kara, K. On the impact of geometry scaling and mass flow rate on the frequency of a sweeping jet actuator. FME Trans. 2019, 47, 599–607. [Google Scholar] [CrossRef] [Green Version]
- Vatsa, V.; Koklu, M.; Wygnanski, I. Numerical simulation of fluidic actuators for flow control applications. In Proceedings of the 6th AIAA Flow Control Conference, New Orleans, LA, USA, 25–28 June 2012; p. 3239. [Google Scholar]
- Tajik, A.R.; Kara, K.; Parezanović, V. Sensitivity of a fluidic oscillator to modifications of feedback channel and mixing chamber geometry. Exp. Fluids 2021, 62, 250. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh Name | Total Number of Elements | Total Number of Nodes |
|---|---|---|
| N-40 | 199,489 | 201,155 |
| N-50 | 288,969 | 290,932 |
| N-60 | 397,342 | 399,634 |
| N-80 | 1,008,947 | 1,012,880 |
| Ref. | Analysis Type | Strouhal Number | Oscillatory Frequency | Error |
|---|---|---|---|---|
| Slupski [24] | Experimental | 0.0160 | 337.70 Hz | - |
| Furkan [7] | Numerical (3D-URANS) | 0.0131 | 341.80 Hz | 1.21% |
| Present Study | Numerical (2D-URANS) | 0.0134 | 350.04 Hz | 3.64% |
| Curvature | ||||||||
|---|---|---|---|---|---|---|---|---|
| Sampling Points | 0.86 h * | 0.70 h | 0.80 h | 0.90 h | 1.00 h | 1.10 h | 1.20 h | 1.30 h |
| P-lf (Hz) | 350.04 | 348.03 | 349.84 | 349.96 | 349.97 | 360.91 | 360.03 | 360.98 |
| P-uf (Hz) | 350.01 | 349.16 | 350.09 | 349.91 | 349.96 | 360.03 | 360.96 | 360.10 |
| Angle | ||||||||
| Sampling Points | 35 deg | 40 deg | 45 deg | 50 deg * | 55 deg | 60 deg | 65 deg | |
| P-lf (Hz) | 359.03 | 359.03 | 359.84 | 350.04 | 350.05 | 339.98 | 339.98 | |
| P-uf (Hz) | 359.96 | 359.54 | 359.93 | 350.01 | 350.28 | 340.23 | 340.10 | |
| L-top | ||||||||
| Sampling Points | 0.86 h * | 0.70 h | 0.80 h | 0.90 h | 1.10 h | 1.20 h | 1.30 h | 1.50 h |
| P-lf (Hz) | 350.04 | 339.98 | 350.16 | 350.03 | 350.24 | 349.91 | 350.03 | 350.43 |
| P-uf (Hz) | 350.01 | 340.10 | 350.13 | 350.40 | 350.03 | 349.90 | 350.17 | 349.96 |
| L-both | ||||||||
| Sampling Points | 0.70 h | 0.80 h | 0.86 h * | 1.10 h | 1.20 h | 1.30 h | ||
| P-lf (Hz) | 340.11 | 340.91 | 350.04 | 349.97 | 350.03 | 359.84 | ||
| P-uf (Hz) | 339.91 | 339.98 | 350.01 | 350.42 | 350.17 | 359.16 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alam, M.; Kara, K. The Influence of Exit Nozzle Geometry on Sweeping Jet Actuator Performance. Fluids 2022, 7, 69. https://doi.org/10.3390/fluids7020069
Alam M, Kara K. The Influence of Exit Nozzle Geometry on Sweeping Jet Actuator Performance. Fluids. 2022; 7(2):69. https://doi.org/10.3390/fluids7020069
Chicago/Turabian StyleAlam, Mobashera, and Kursat Kara. 2022. "The Influence of Exit Nozzle Geometry on Sweeping Jet Actuator Performance" Fluids 7, no. 2: 69. https://doi.org/10.3390/fluids7020069
APA StyleAlam, M., & Kara, K. (2022). The Influence of Exit Nozzle Geometry on Sweeping Jet Actuator Performance. Fluids, 7(2), 69. https://doi.org/10.3390/fluids7020069