
A Semi-Lagrangian Godunov-Type Method without Numerical Viscosity for Shocks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. A Methodological Concept for the Inviscid Burgers’ Equation
- (1)
- If the conditions
- (2)
- If the conditions
- (3)
- If
2.2. Basic Terms and a Methodological Concept for Adiabatic Gas Dynamics Equations
2.3. Basic Terms and a Methodological Concept for the One-Dimensional Scalar Hyperbolic Conservation Law
3. Results
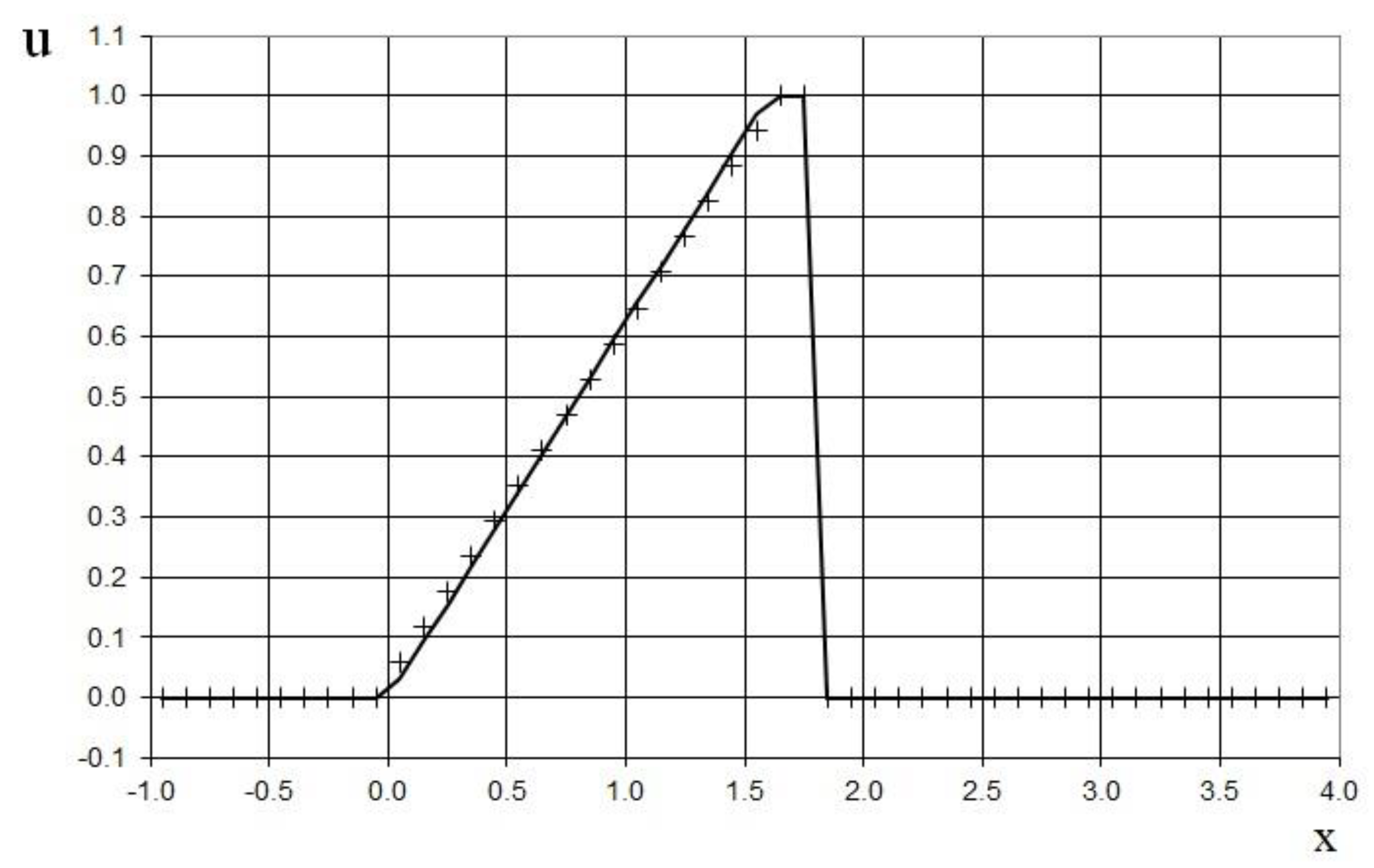
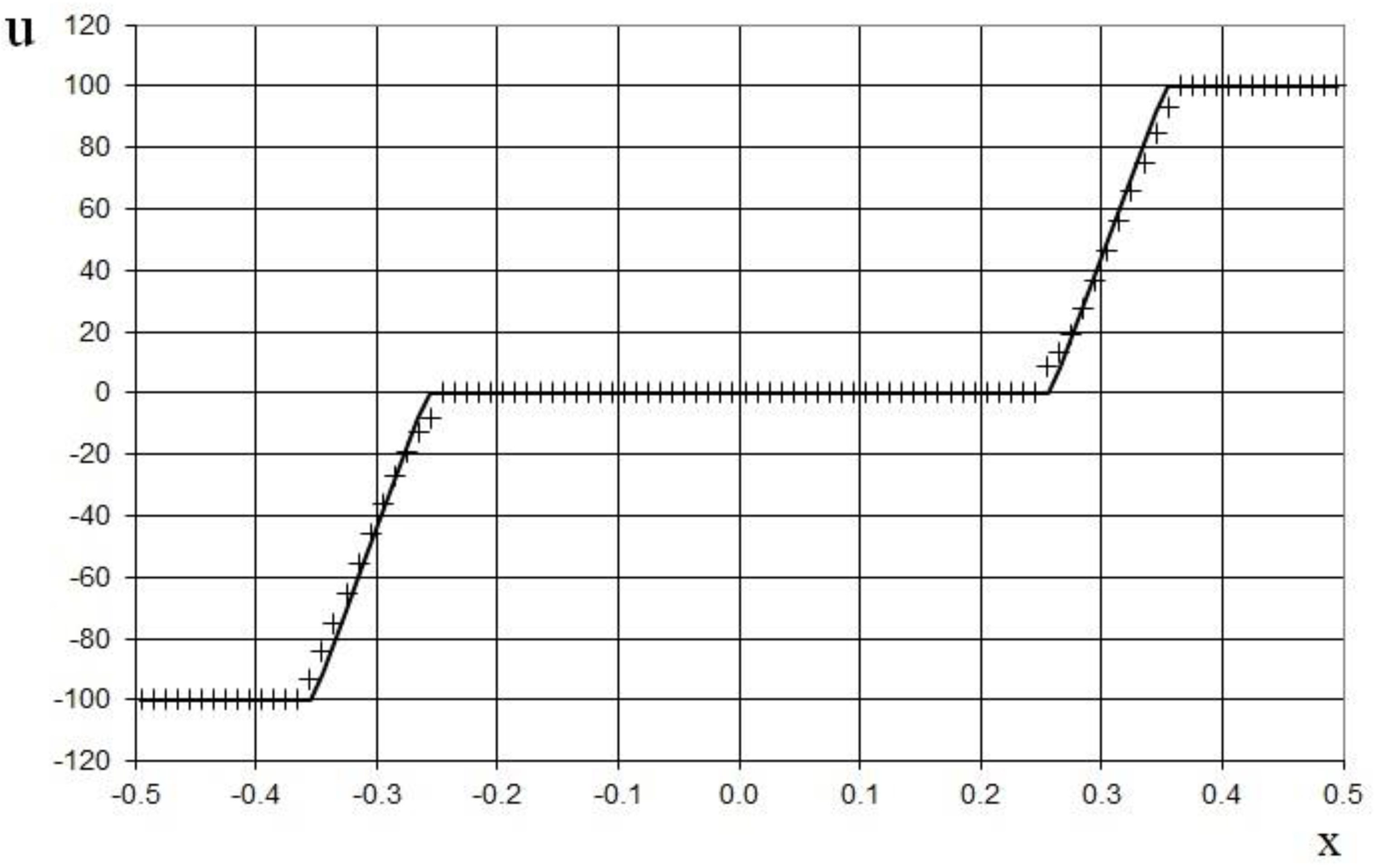
3.1. Results for the Inviscid Burgers’ Equation
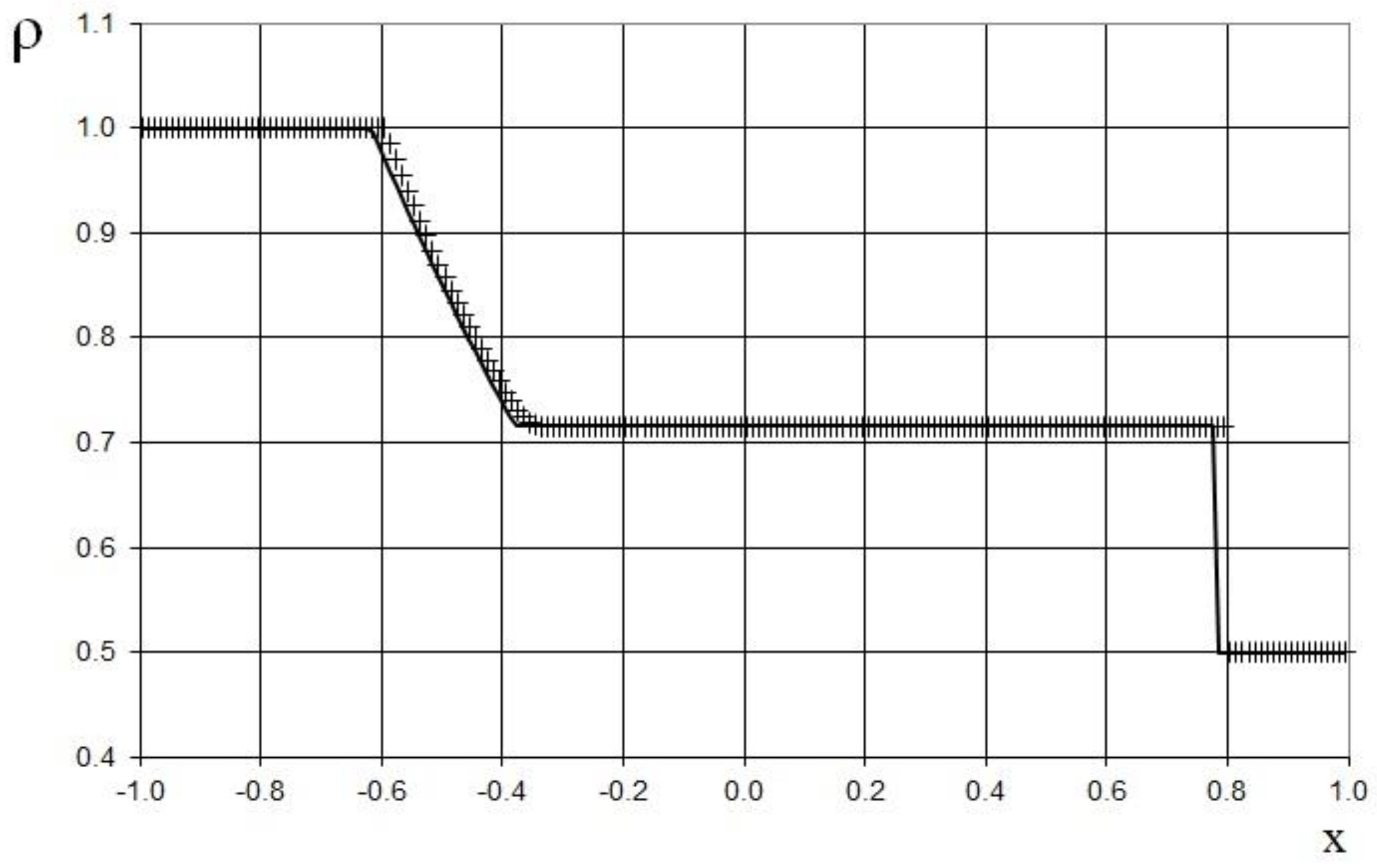
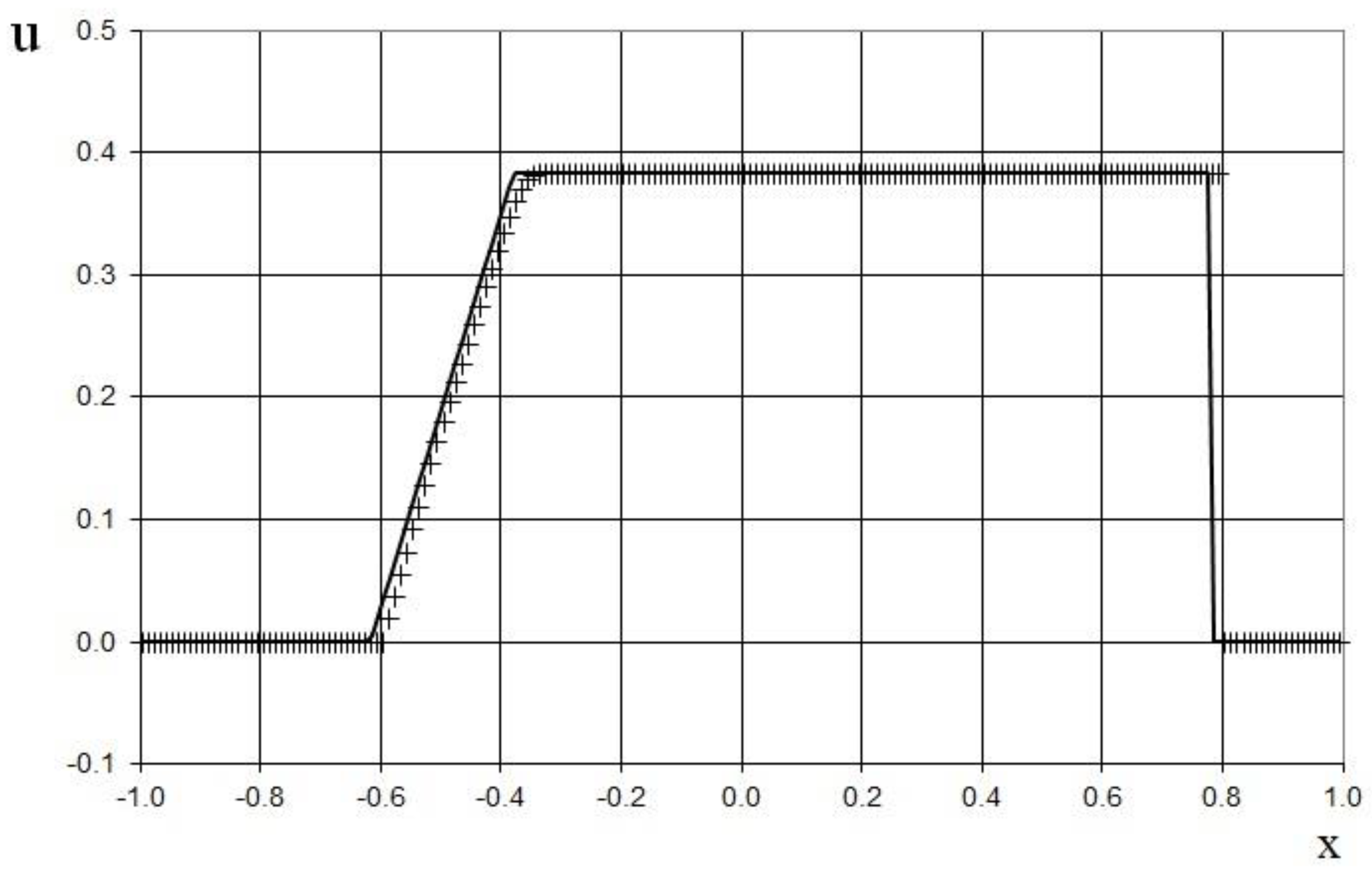
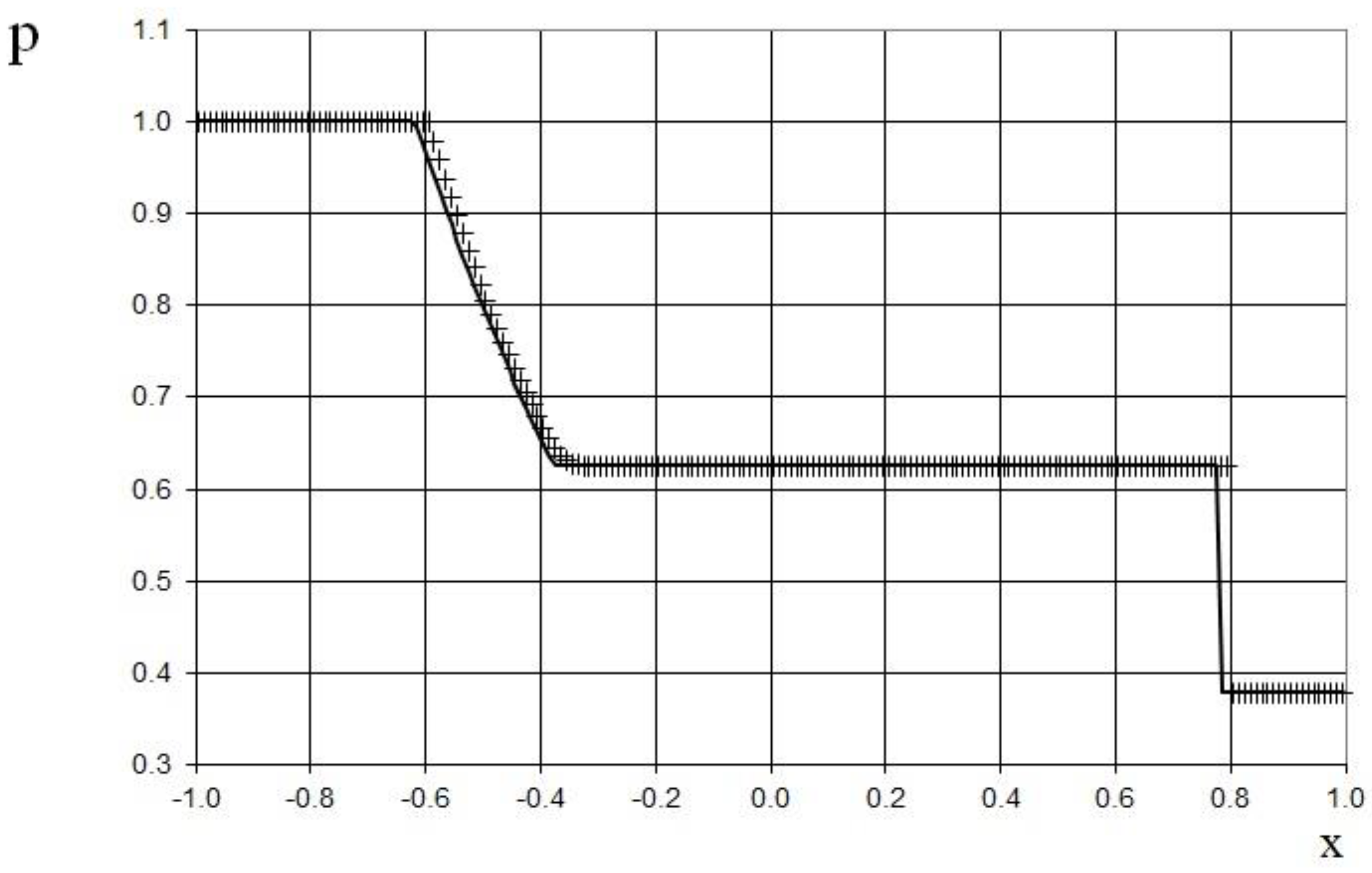
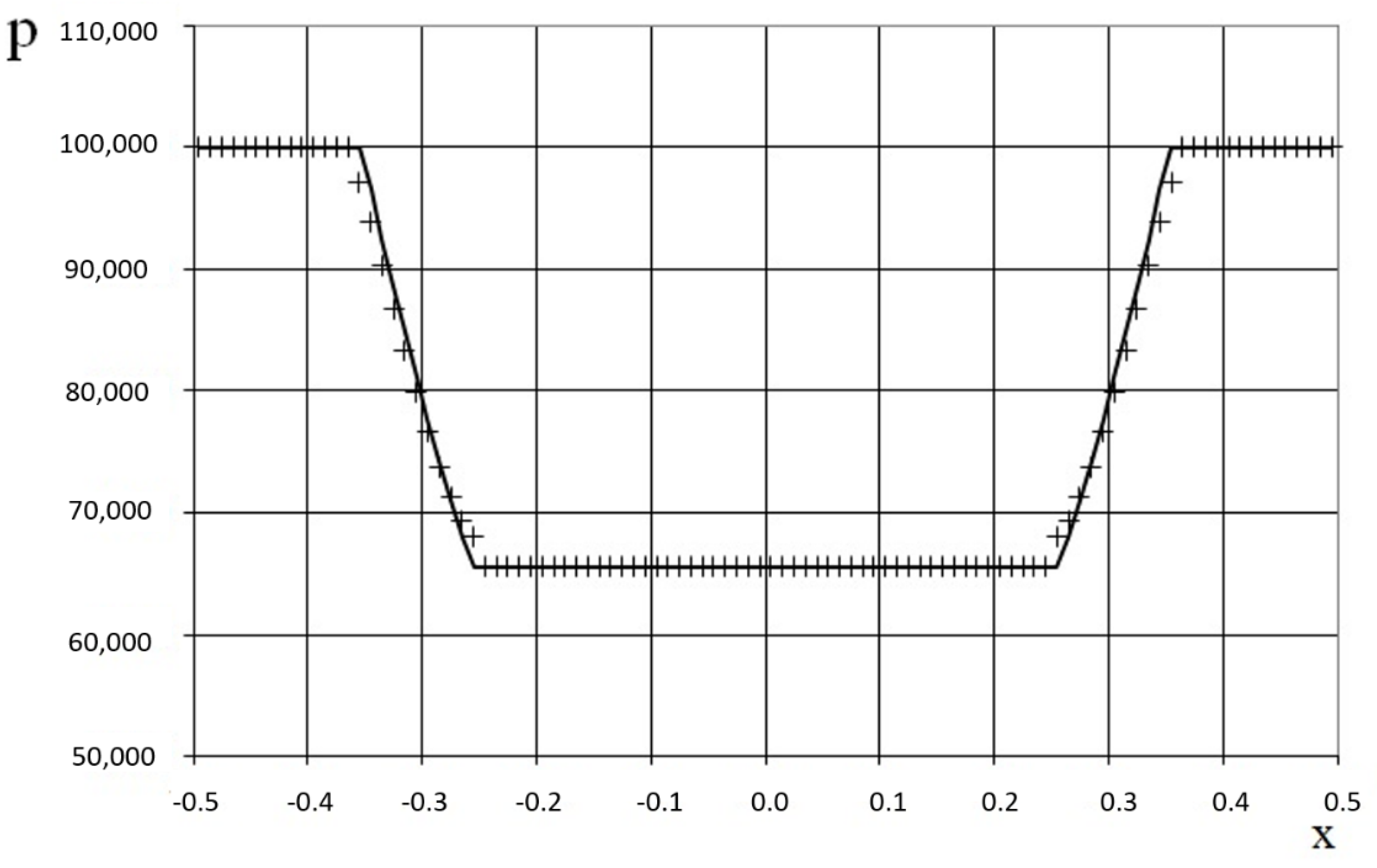
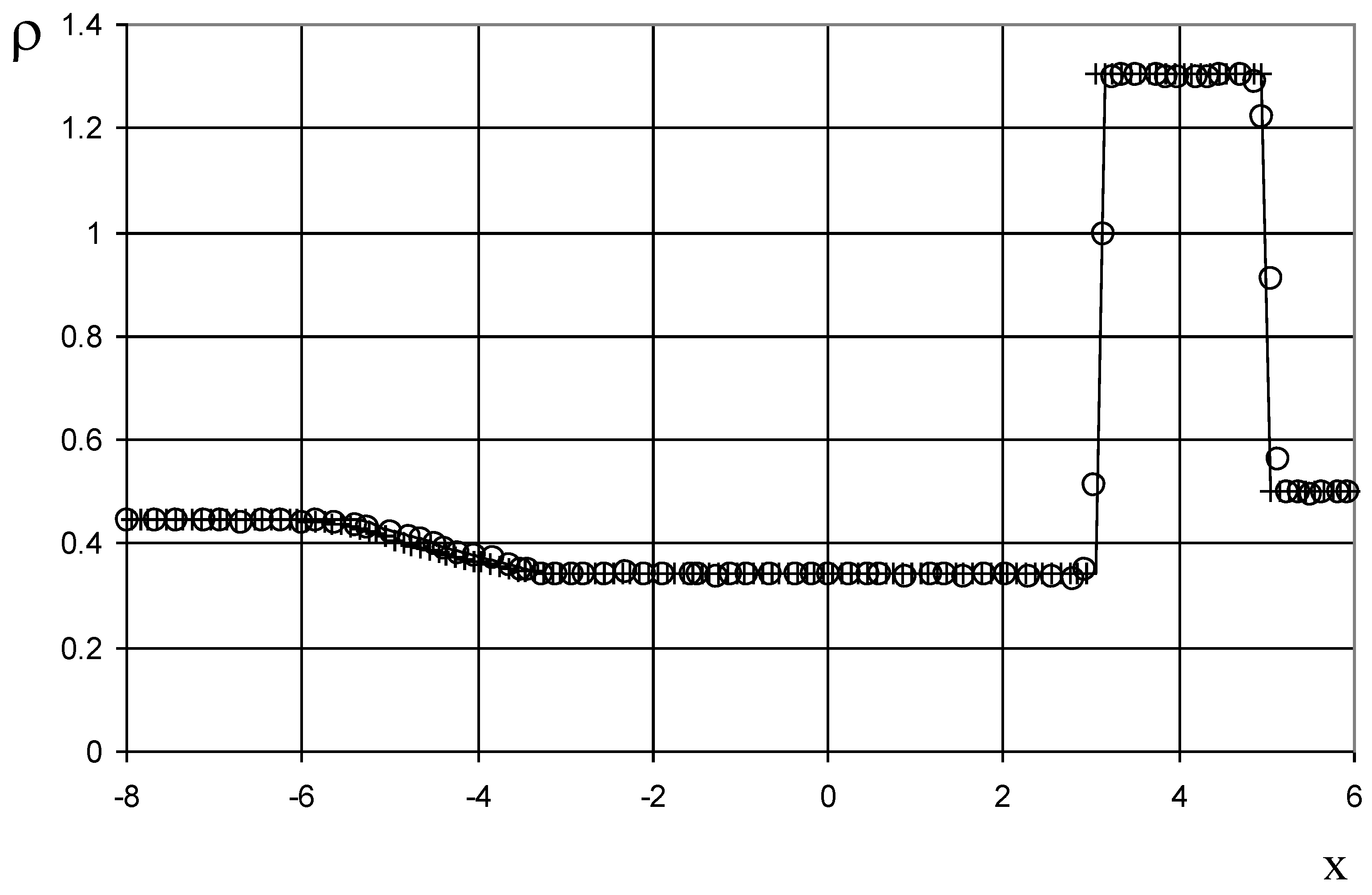
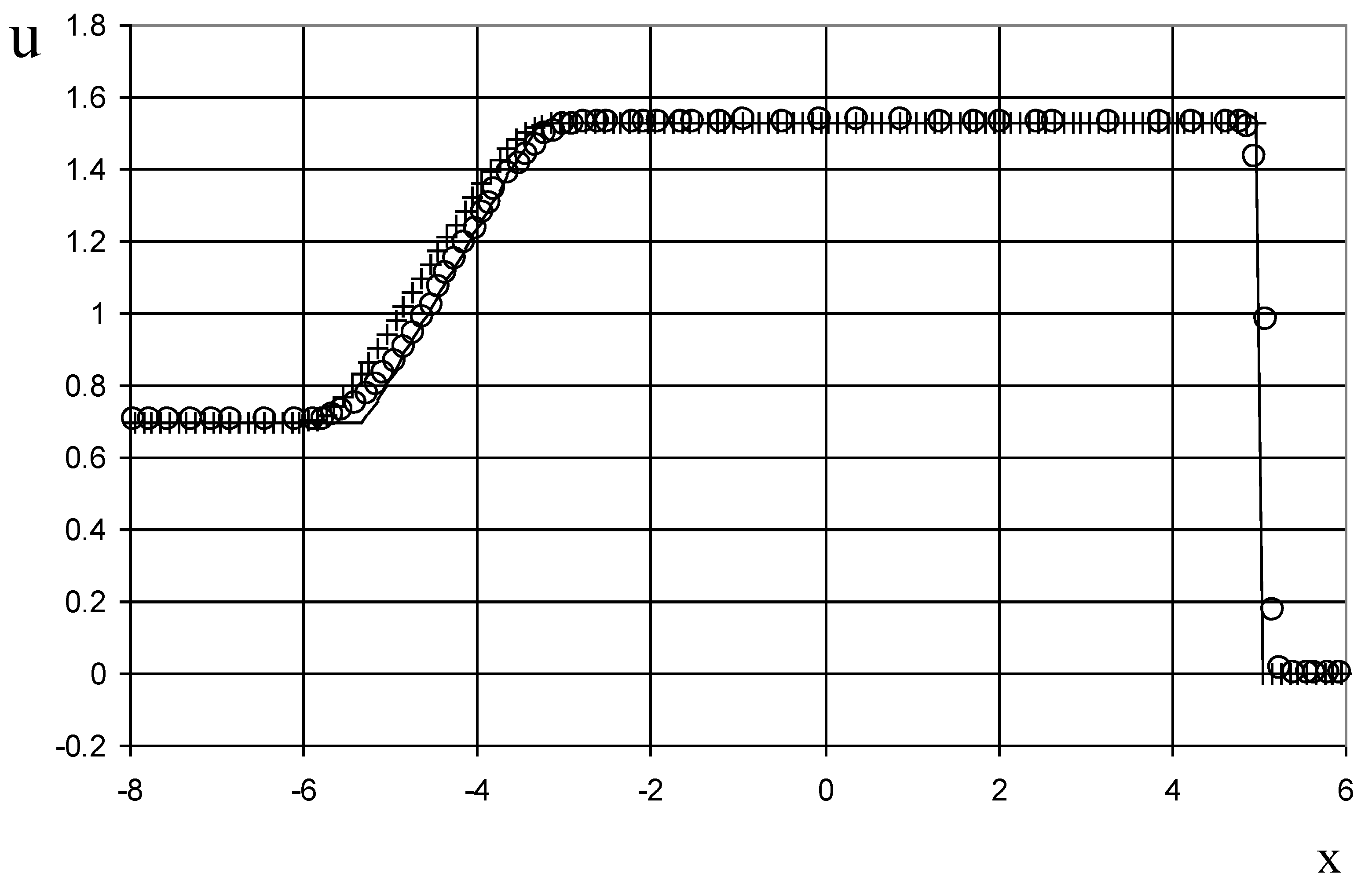
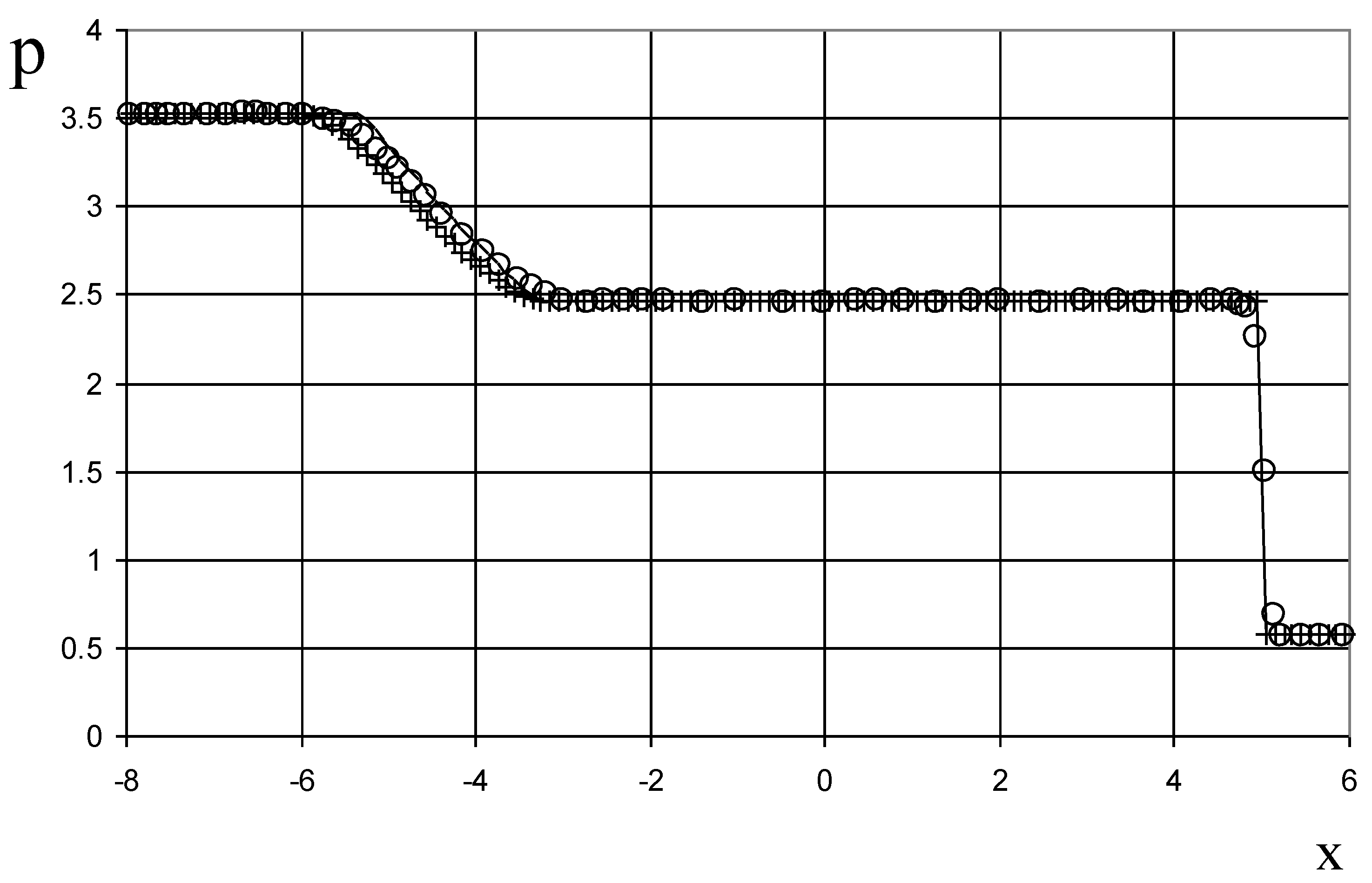
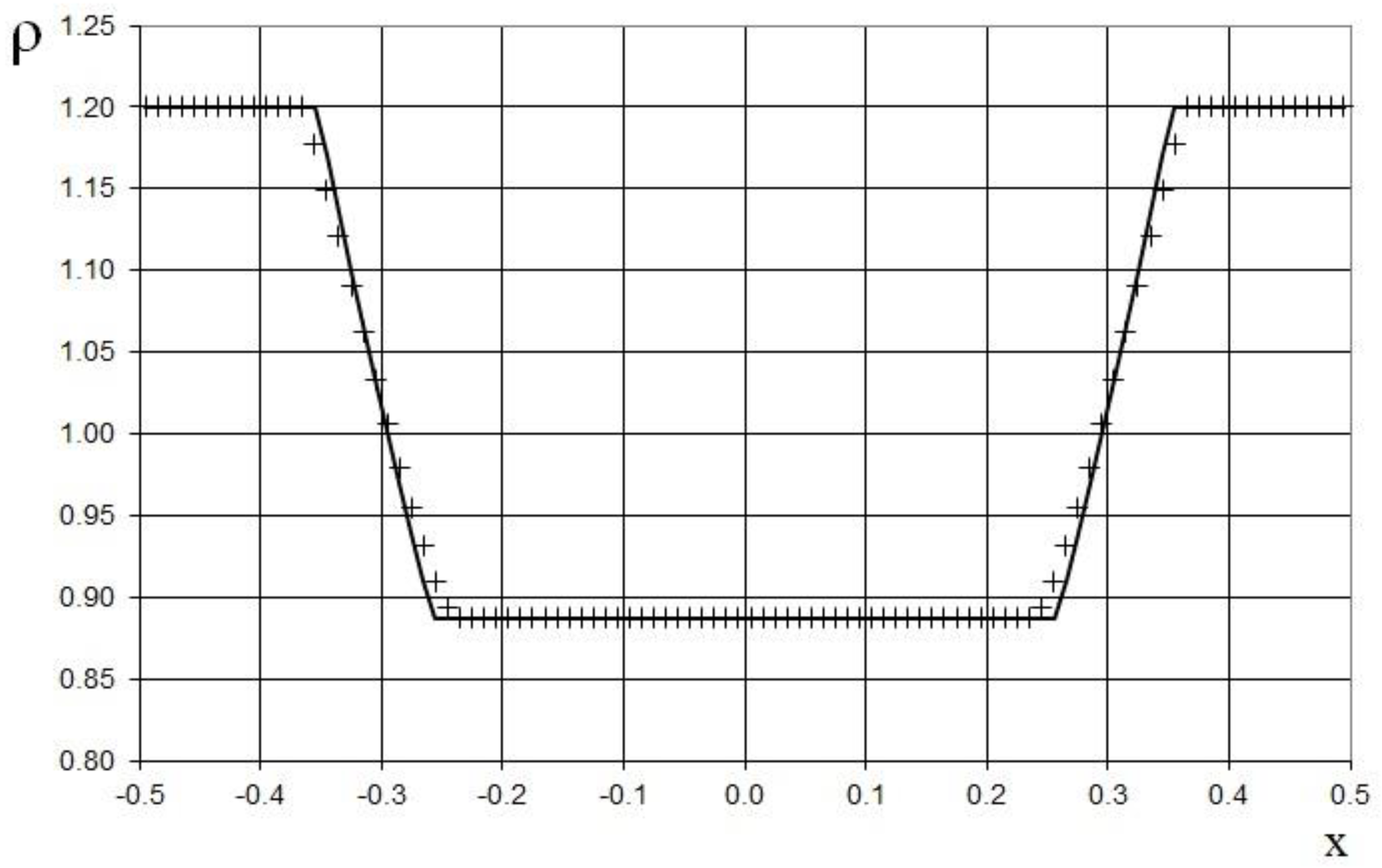
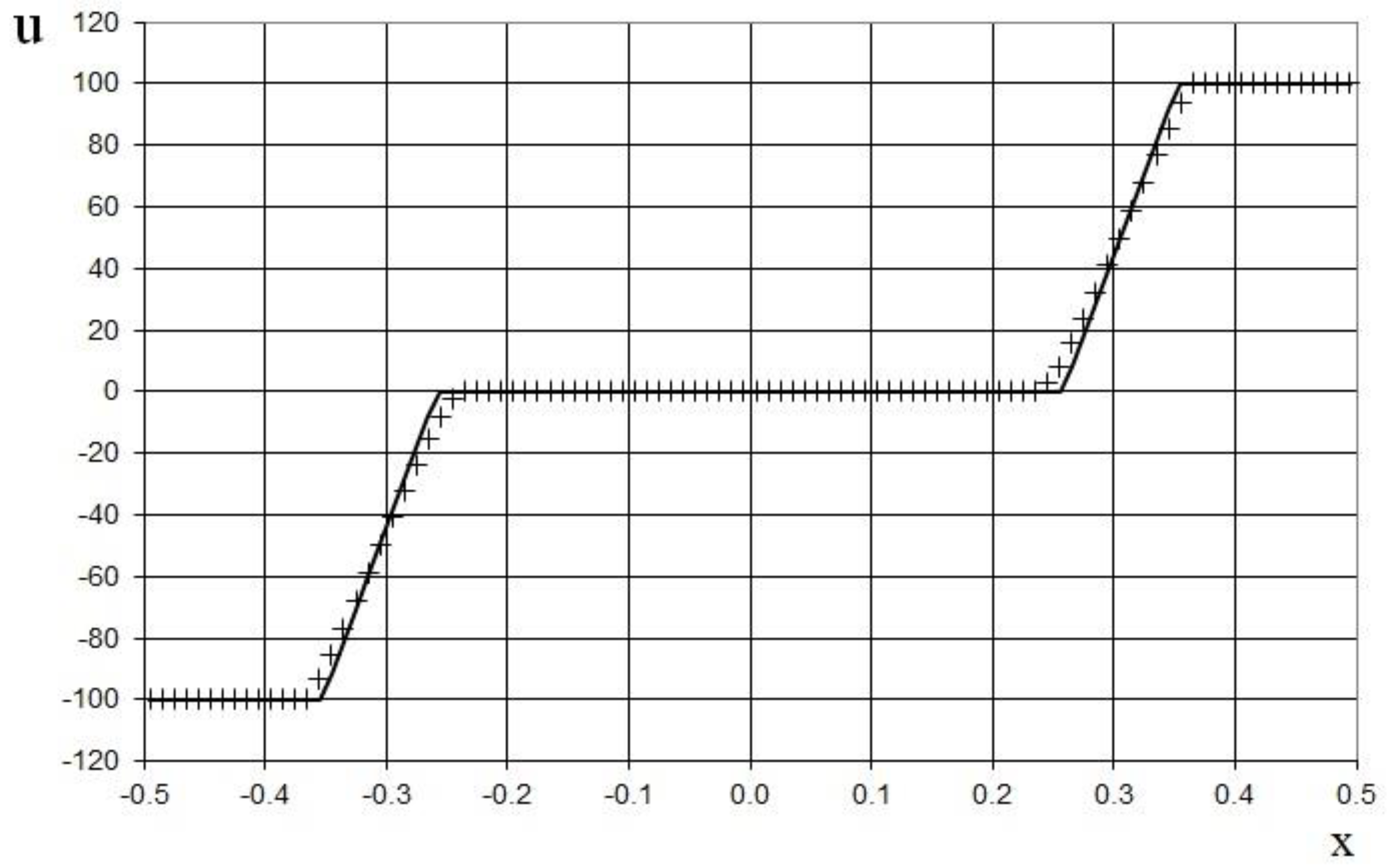
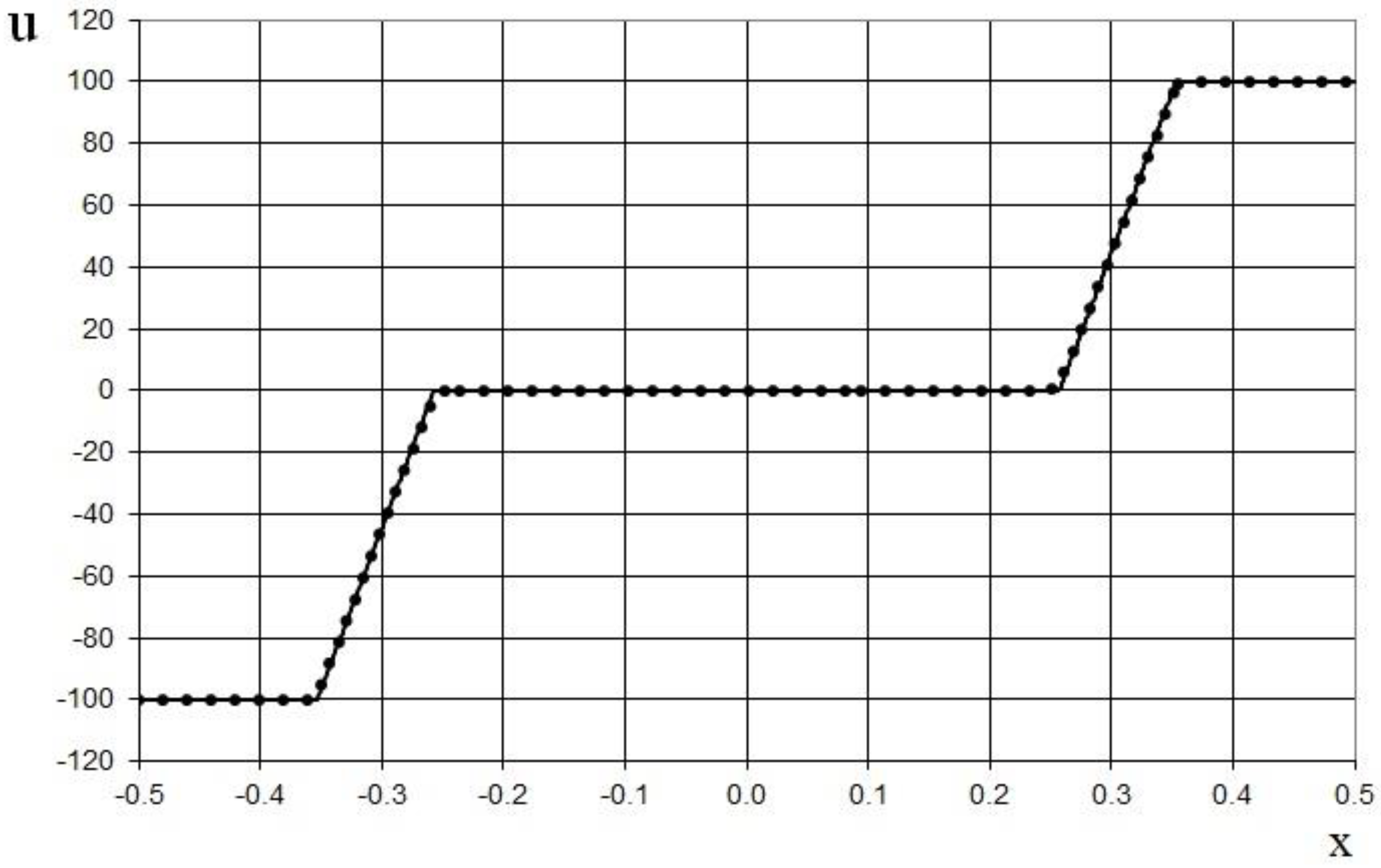
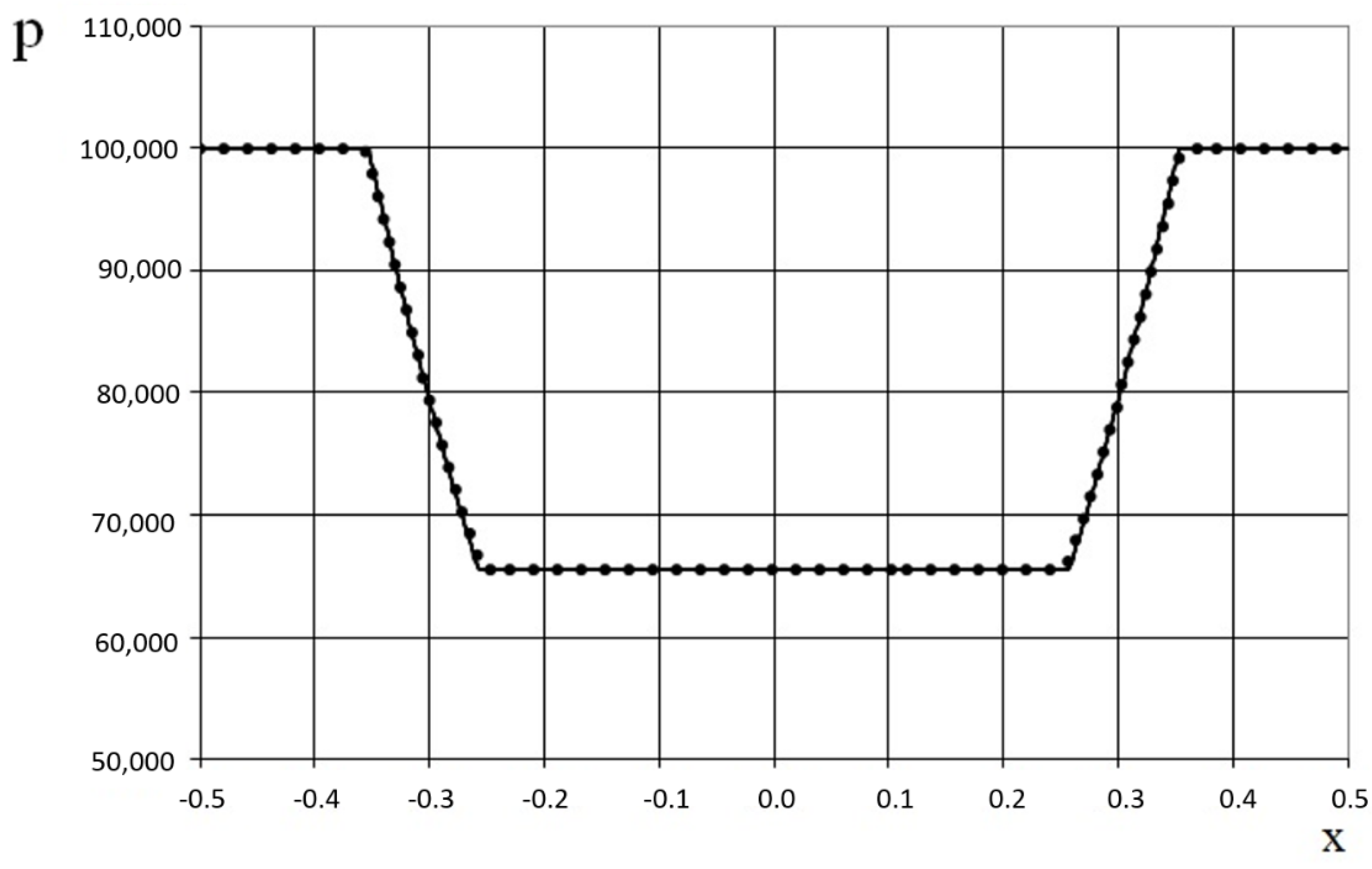
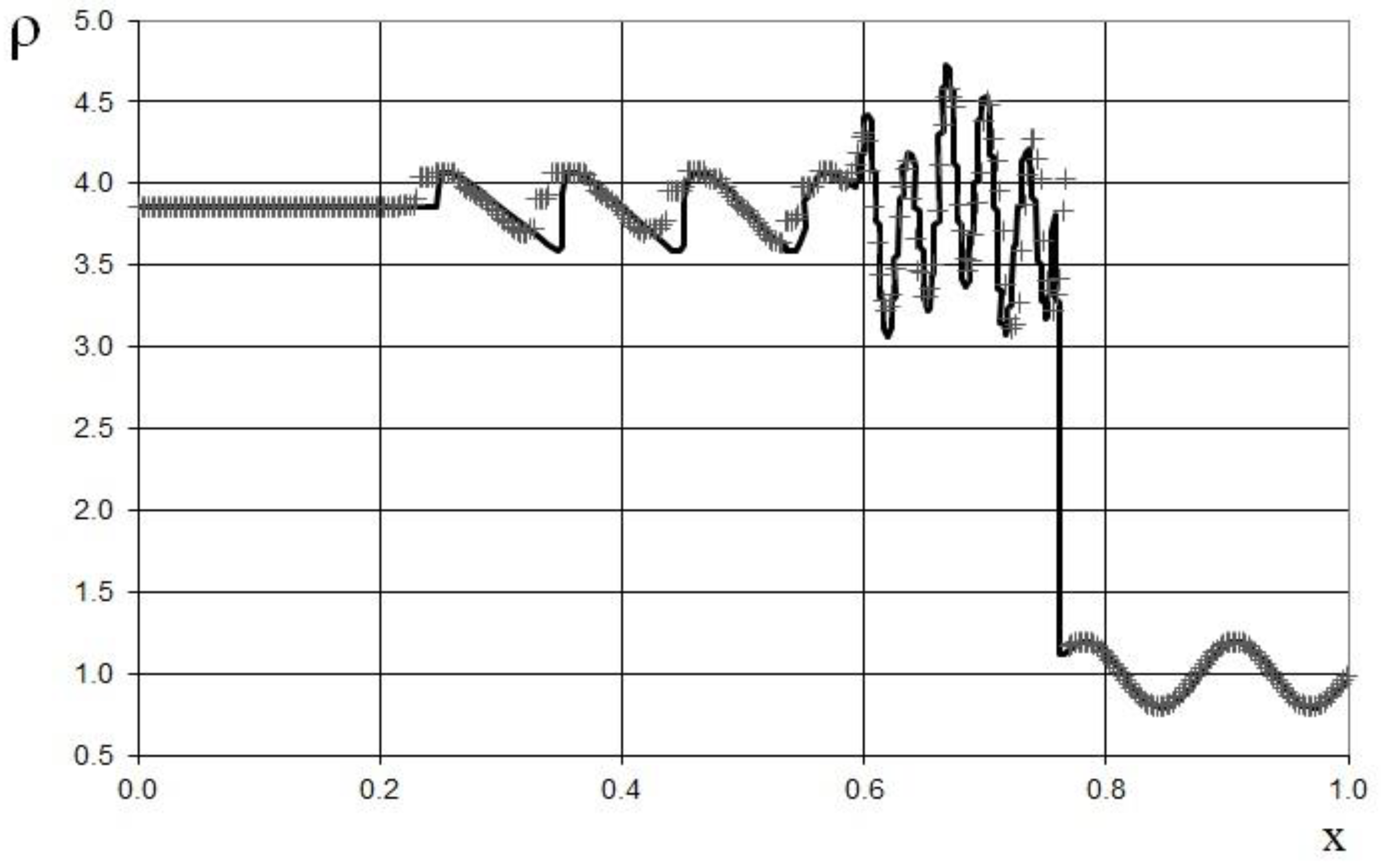
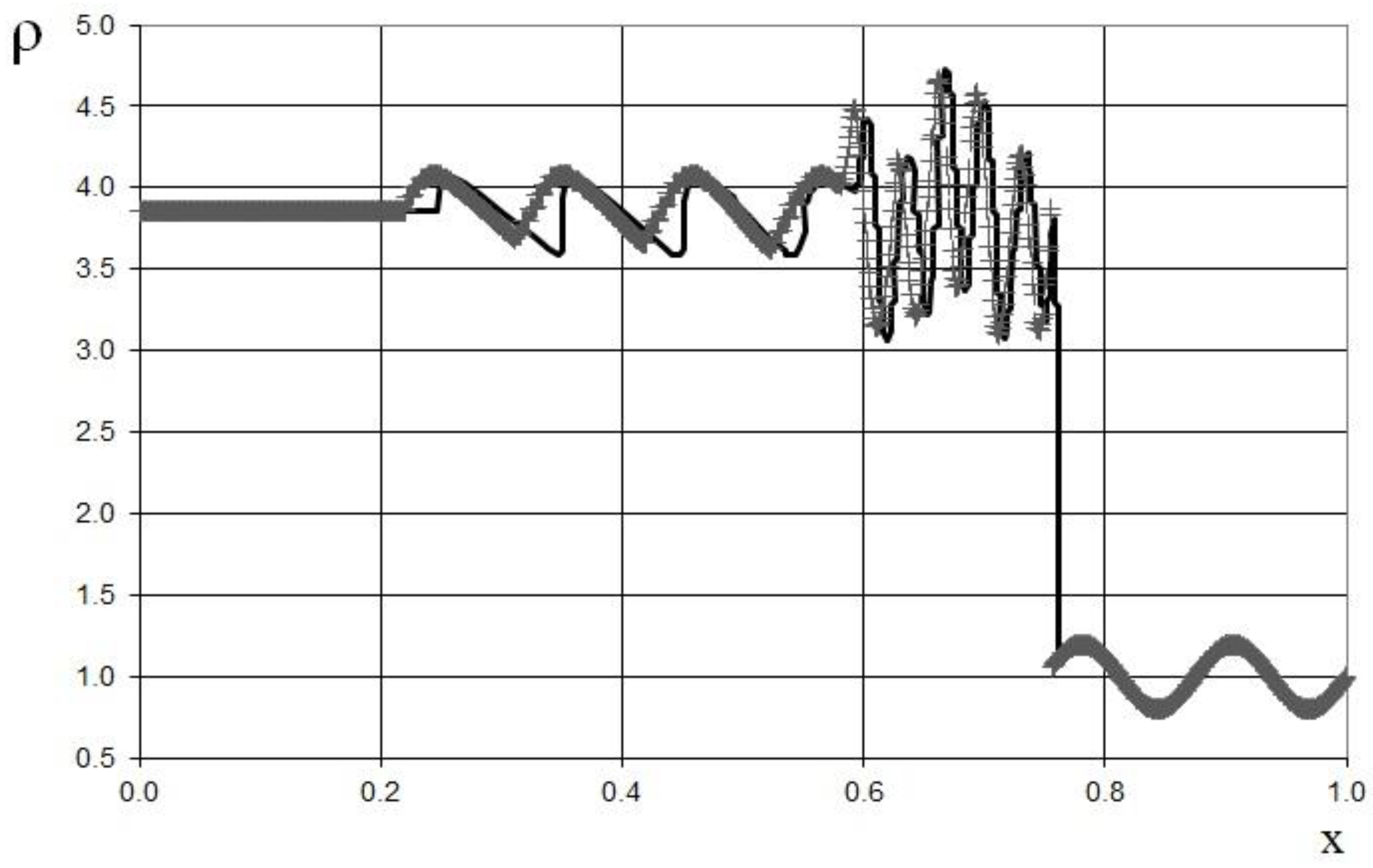
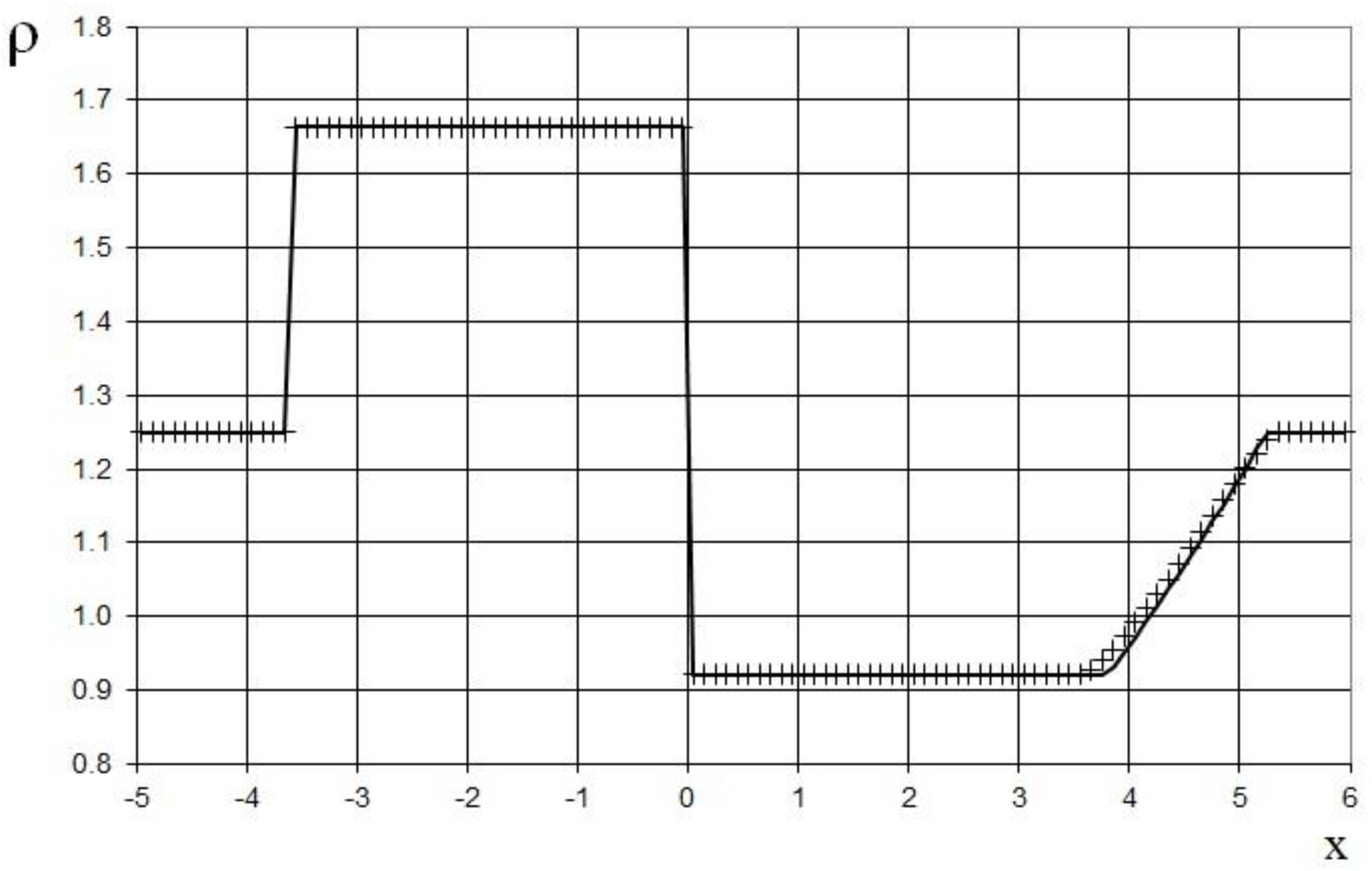
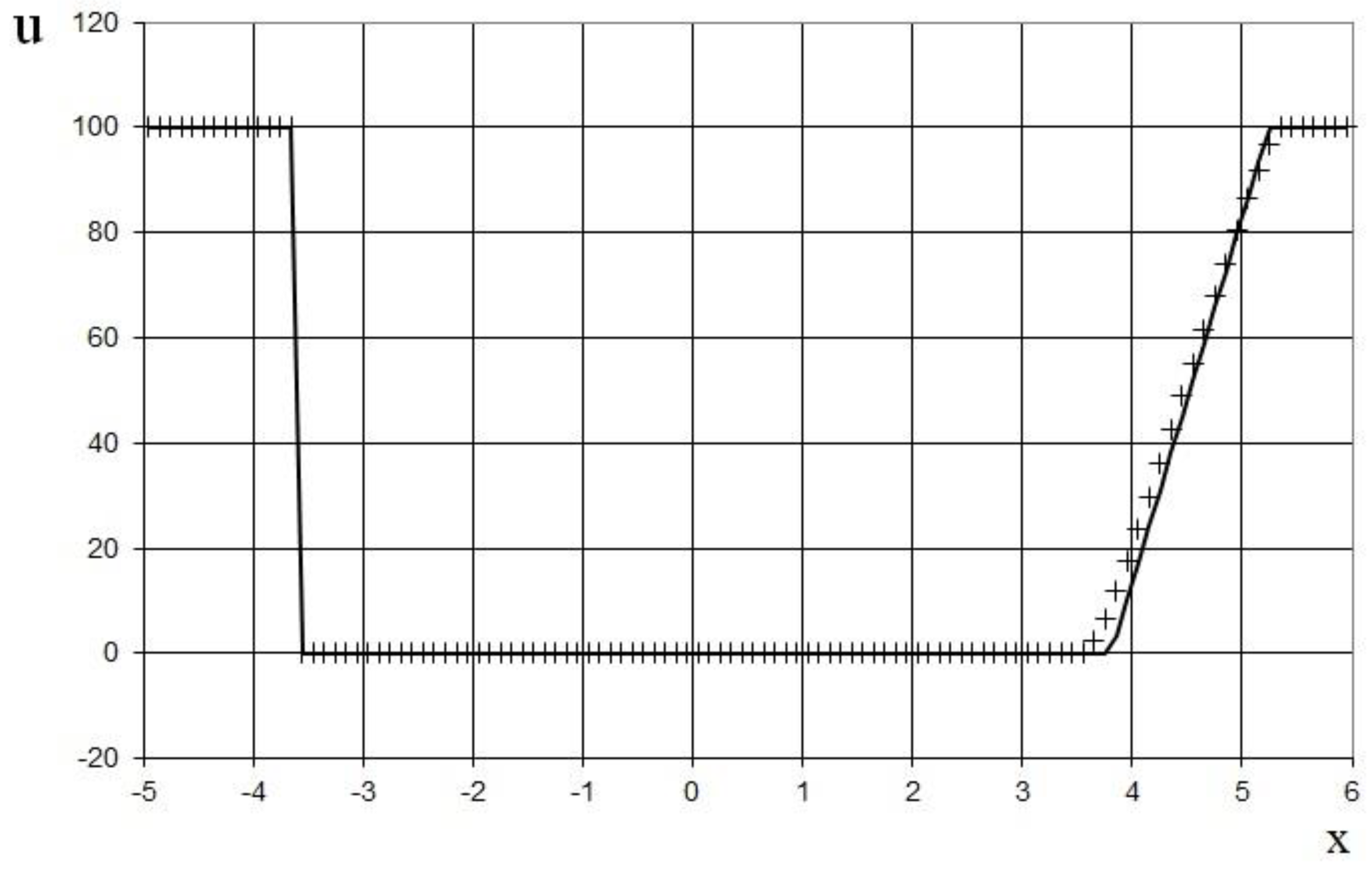
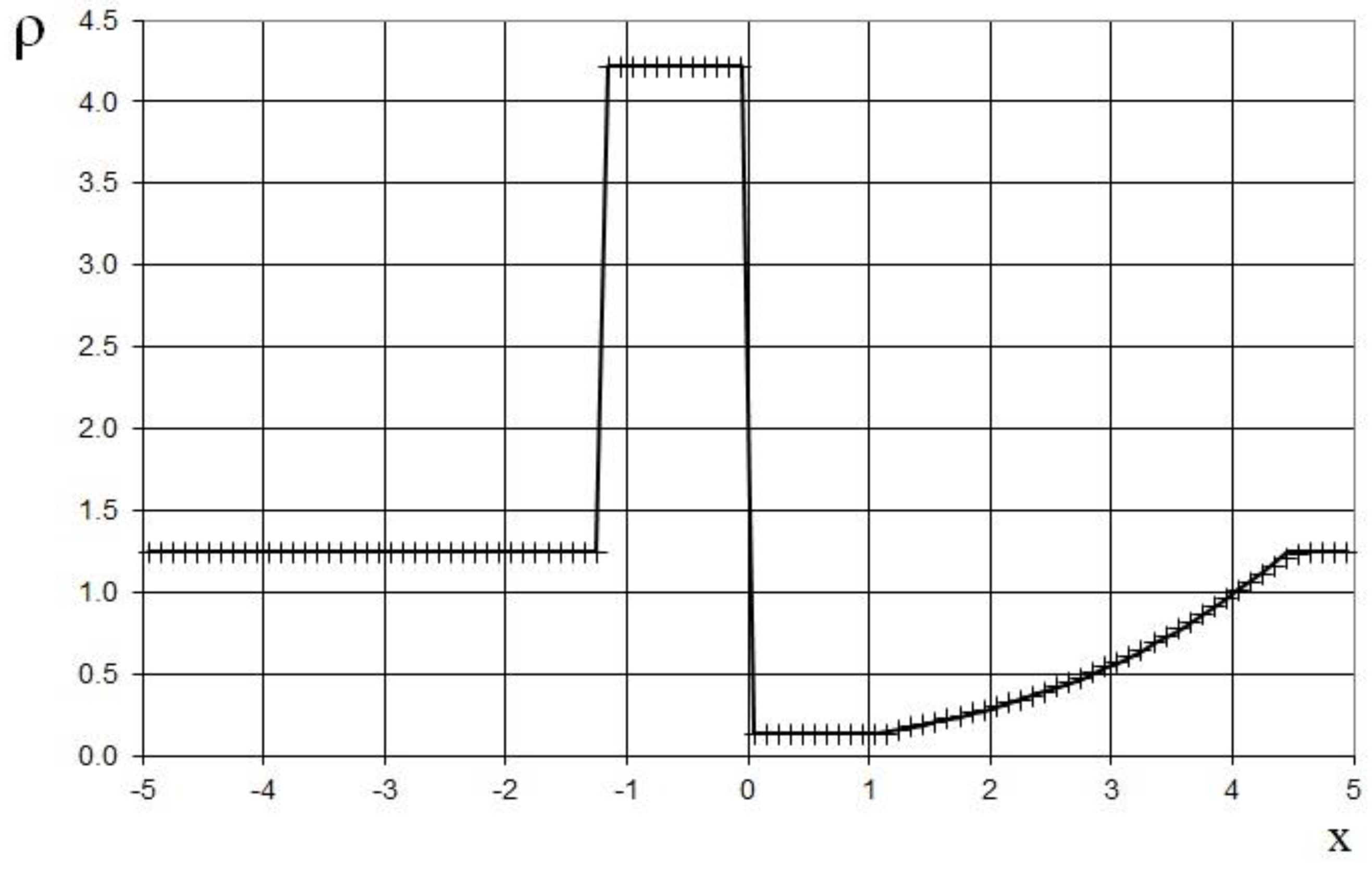
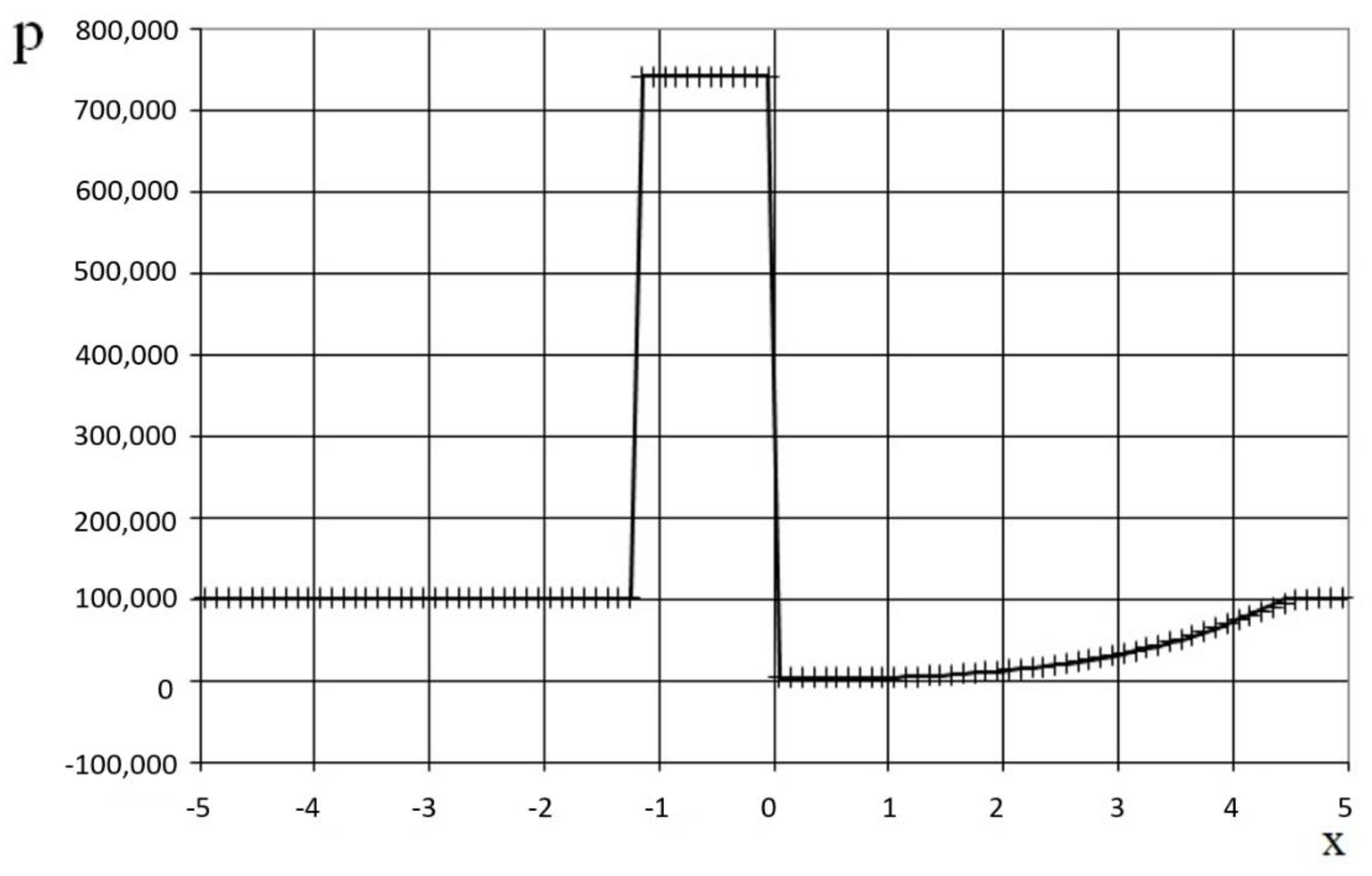
3.2. Results for the Adiabatic Gas Dynamics Equations
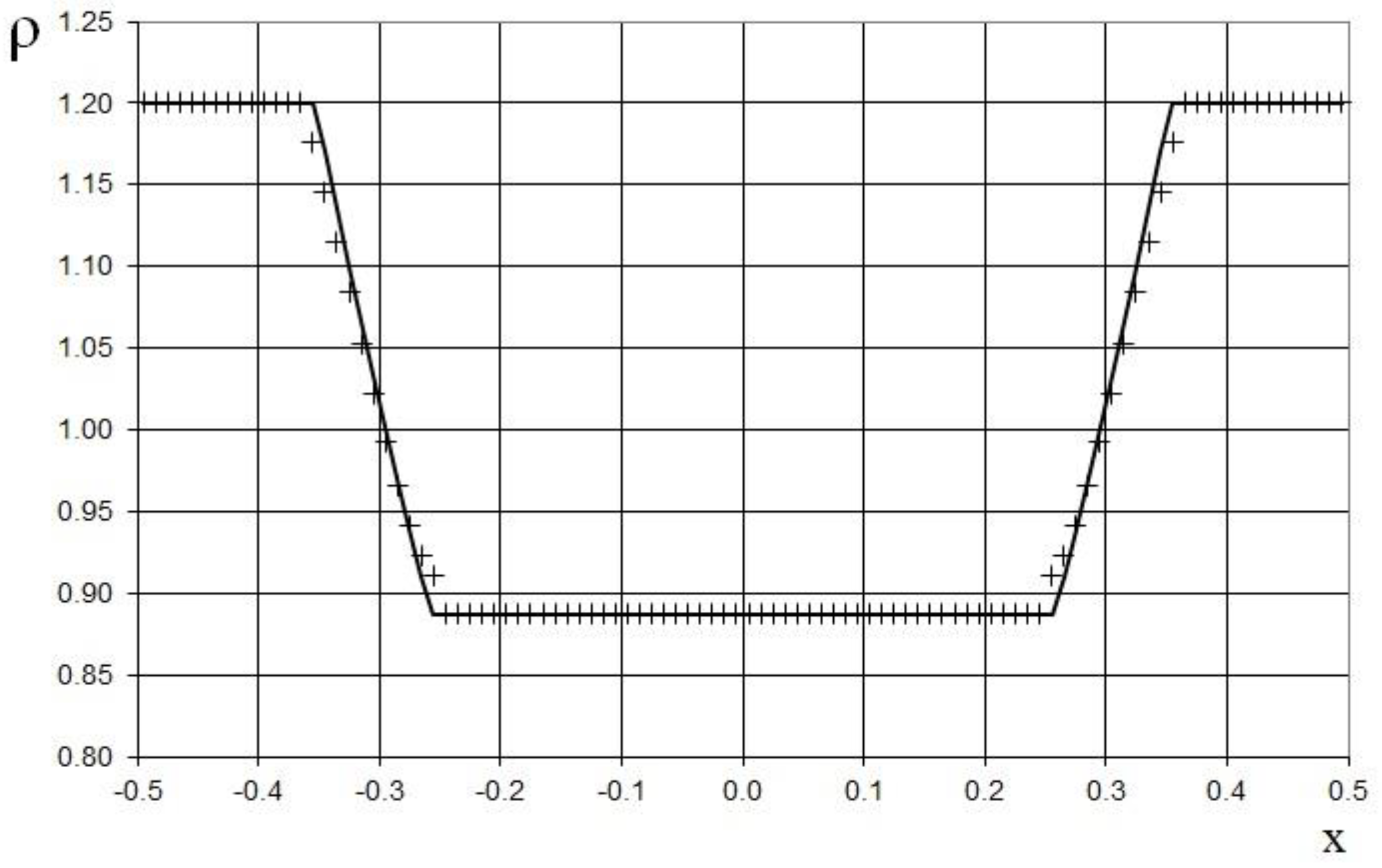
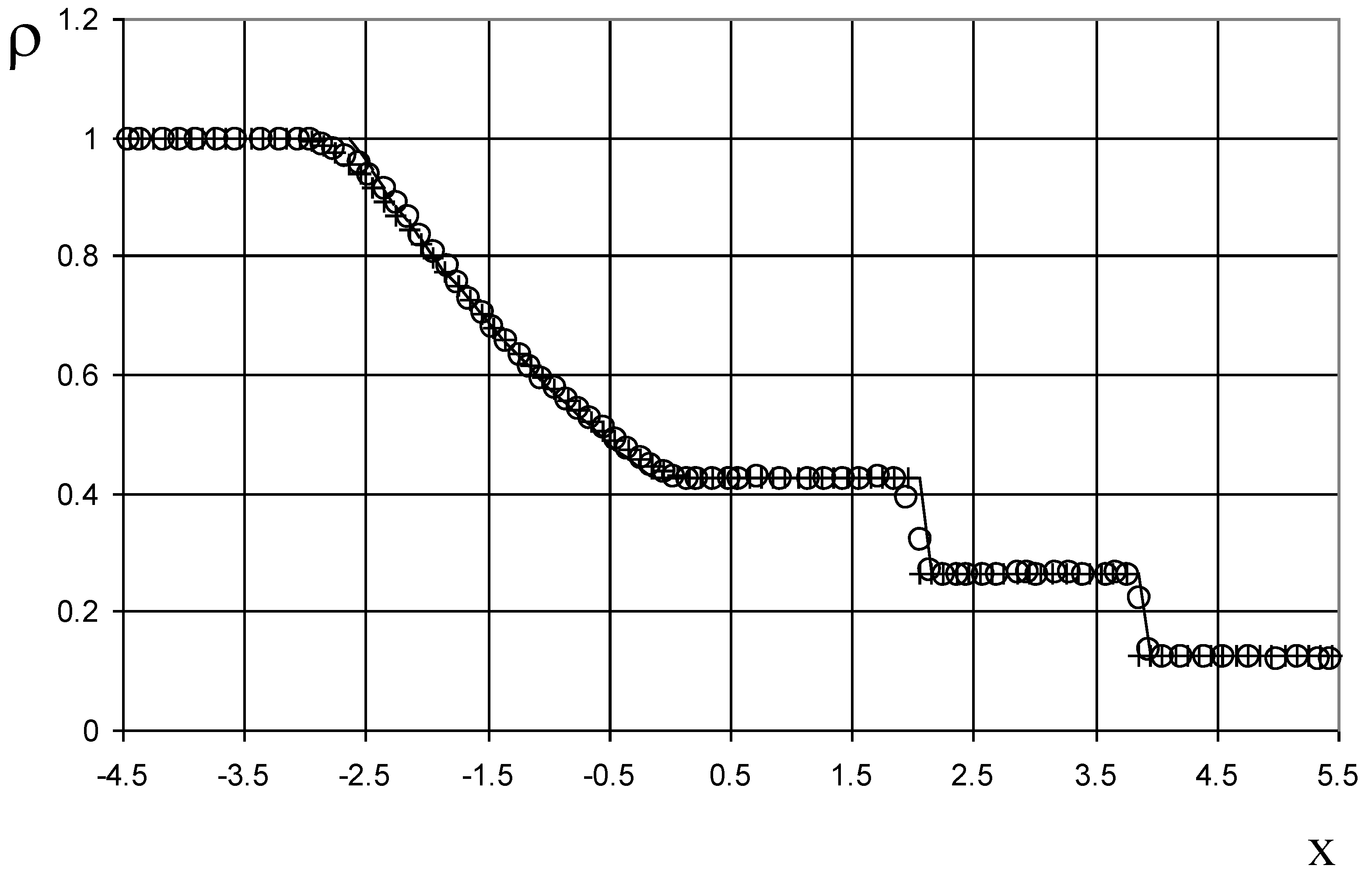
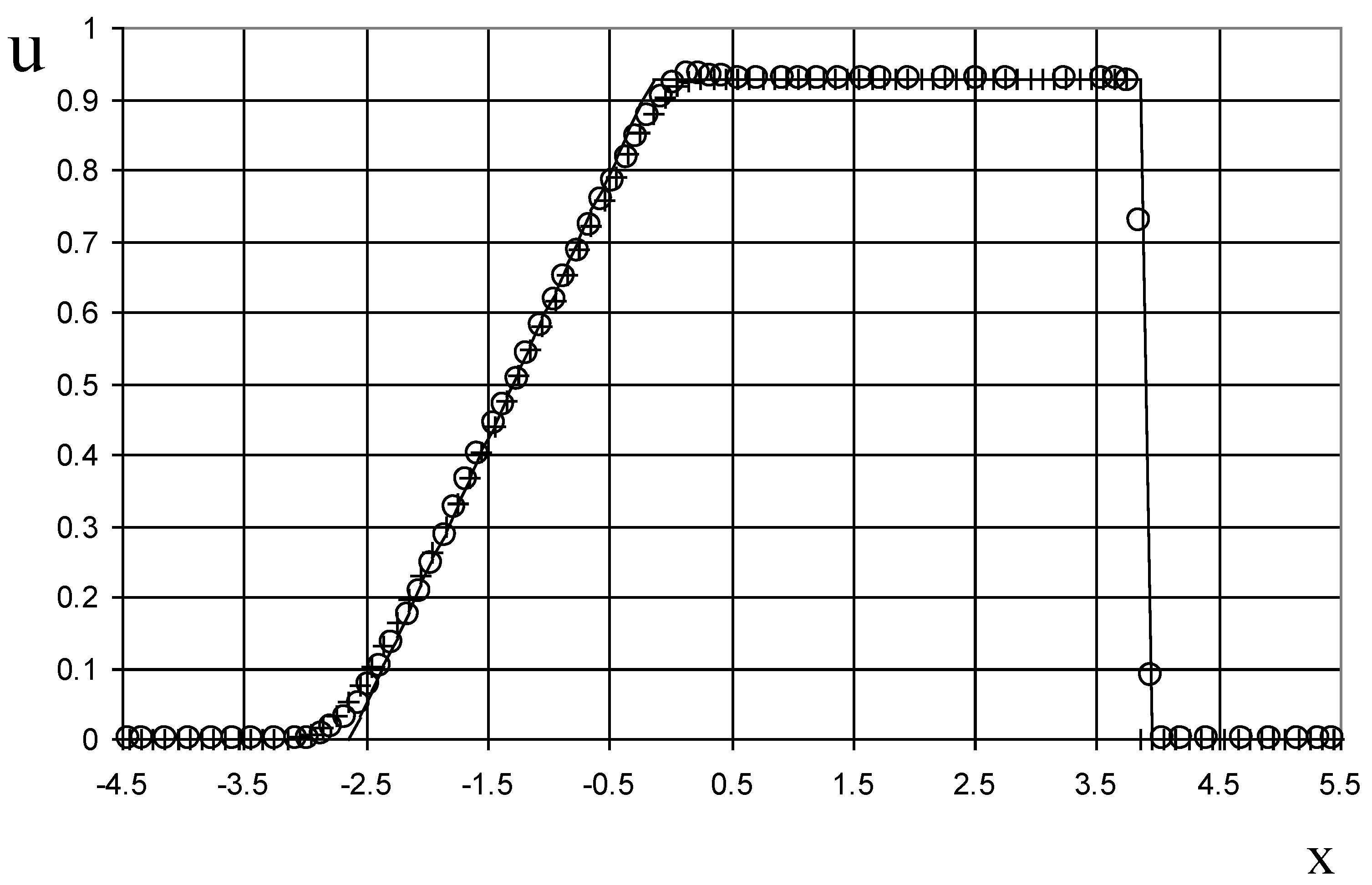
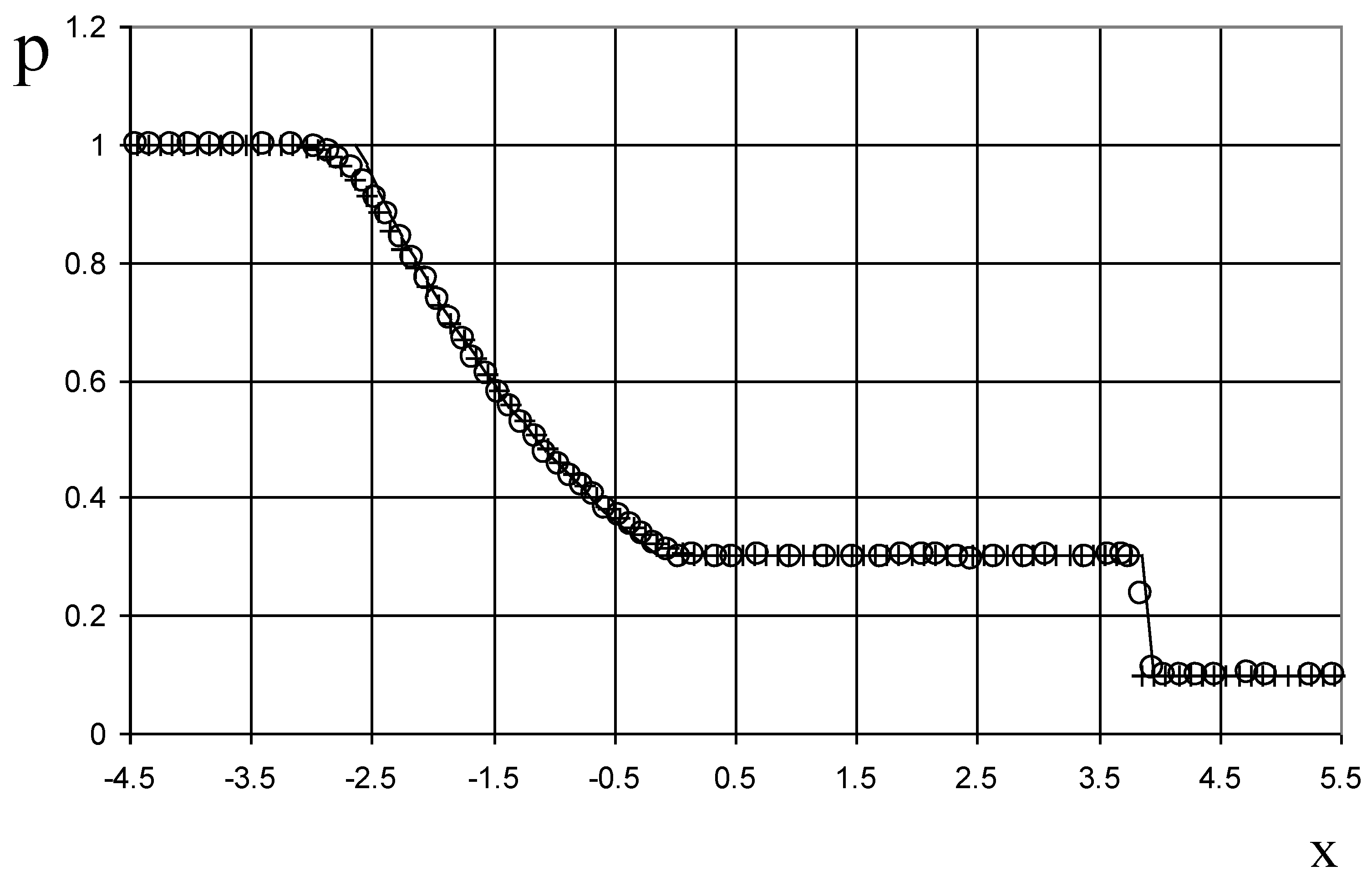
3.3. Results for the One-Dimensional Scalar Hyperbolic Conservation Law
4. Discussion
- (1)
- The advantage of the proposed method in comparison with the known methods of TVD, ENO, and WENO is the absence of numerical viscosity (diffusion) for shocks;
- (2)
- The convective terms are not neglected in comparison with the MOC methods, which is important in gas flow modeling;
- (3)
- Over time, shocks or rarefaction waves can propagate somewhat slower or faster than in the exact solution. This can be attributed to the rounding off of the position of the wave fronts to the accuracy of the grid cell, owing to the use of the fixed homogeneous grid.
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbol | Meaning |
| Convective velocity of flow | |
| Direction | |
| Time | |
| Time step, marching time step | |
| Tolerance associated with the comparison of the flow variables | |
| Machine arithmetic tolerance associated with the comparison of the coordinates | |
| Grid step | |
| Number of grid cells | |
| Convective velocity of a shock | |
| Integer coefficient in the formula for the time step at the convection stage | |
| Left boundary of a modeling area | |
| Right boundary of the modeling area | |
| Density | |
| Pressure | |
| Ratio of specific heat coefficients | |
| Sound velocity | |
| Transfer variables of wave equations | |
| Transfer vector variables | |
| Coordinate index | |
| Coordinate index | |
| Time index | |
| Pressure function for adiabatic law | |
| time step at the acoustics stage | |
| Acoustic velocity of a shock | |
| Integer coefficient in the formula for the time step at the acoustics stage | |
| Time step at the convection stage | |
| An integer showing how many times the time step at the acoustics stage is greater than the marching time step | |
| An integer showing how many times the time step at the convection stage is greater than the marching time step | |
| Internal specific energy | |
| Jacobian matrix | |
| Diagonal matrix of eigenvalues of the Jacobian matrix | |
| Matrix of corresponding left eigenvectors | |
| Matrix of corresponding right eigenvectors | |
| Diagonal identity matrix | |
| Constant sound velocity | |
| Constant density | |
| Density of the exact solution of the Riemann problem on the left | |
| Density of the exact solution of the Riemann problem on the right | |
| Velocity of the exact solution of the Riemann problem on the left | |
| Velocity of the exact solution of the Riemann problem on the right | |
| Internal specific energy of the Riemann problem on the left | |
| Internal specific energy of the Riemann problem on the right | |
| Pressure of the Riemann problem on the left | |
| Pressure of the Riemann problem on the right | |
| Velocity of the propagation of a shock or rarefaction wave of the Riemann problem on the left | |
| Velocity of the propagation of a shock or rarefaction wave of the Riemann problem on the right | |
| Local acoustic velocity of the Riemann problem on the left | |
| Local acoustic velocity of the Riemann problem on the right | |
| Density after the acoustics stage | |
| Pressure after the acoustics stage | |
| Velocity after the acoustics stage | |
| Internal specific energy after the acoustics stage | |
| Density after the convection stage | |
| Pressure after the convection stage | |
| Velocity after the convection stage | |
| Internal specific energy after the convection stage | |
| Velocity on the right | |
| Density for the initial conditions | |
| Pressure for the initial conditions | |
| Velocity for the initial conditions | |
| Pi |
Appendix A. The Methodological Scheme for the Adiabatic Gas Dynamics Equations
Appendix A.1. A Scheme of the Method for the Acoustics Stage
- (1)
- If conditions
- (2)
- If condition
- (3)
- If
Appendix A.2. A Methodological Scheme for the Convection Stage
- (1)
- if the conditions
- (2)
- If the conditions
- -
- if
- -
- if
- (3)
- If
Appendix B. The Scheme of the Method for the One-Dimensional Scalar Hyperbolic Conservation Law
Appendix B.1. A Methodological Scheme for the Acoustics Stage of the One-Dimensional Scalar Hyperbolic Conservation Law
- (1)
- If the conditions
- (2)
- If the condition
- (3)
- If


Appendix B.2. A Scheme of the Method for the Convection Stage of the One-Dimensional Scalar Hyperbolic Conservation Law
- (1)
- if the conditions
- (2)
- If the conditions
- -
- if
- -
- if
- (3)
- If
Appendix B.3. Boundary Conditions for a Wall
References
- von Neumann, J.; Richtmyer, R.D. A method for the numerical calculation of hydrodynamic shocks. J. Appl. Phys. 1950, 21, 232. [Google Scholar] [CrossRef]
- Jameson, A. Analysis and design of numerical schemes for gas dynamics, 1: Artificial diffusion, upwind biasing, limiters and their effect on accuracy and multigrid convergence. Int. J. Comput. Fluid Dyn. 1994, 4, 171–218. [Google Scholar] [CrossRef] [Green Version]
- Harten, A. A high resolution scheme for the computation of weak solutions of hyperbolic conservation laws. J. Comput. Phys. 1983, 49, 357–393. [Google Scholar] [CrossRef] [Green Version]
- Harten, A.; Engquist, B.; Osher, S.; Chakravarthy, S.R. Uniform high order accurate essentially non-oscillatory schemes, III. J. Comput. Phys. 1987, 71, 231–303. [Google Scholar] [CrossRef]
- Liu, X.D.; Osher, S.; Chan, T. Weighted essentially non-oscillatory schemes. J. Comput. Phys. 1994, 115, 200–212. [Google Scholar] [CrossRef] [Green Version]
- Harten, A. ENO schemes with subcell resolution. J. Comput. Phys. 1987, 83, 148–184. [Google Scholar] [CrossRef] [Green Version]
- Harten, A.; Osher, S. Uniformly high order essentially non-oscillatory schemes I. SIAM J. Numer. Anal. 1987, 24, 279–309. [Google Scholar] [CrossRef]
- Harten, A.; Osher, S.; Engquist, B.; Chakravarthy, S. Some results on uniformly high order accurate essentially non-oscillatory schemes. Appl. Numer. Math. 1986, 2, 347–377. [Google Scholar] [CrossRef]
- Shu, C.-W.; Osher, S. Efficient implementation of essentially non-oscillatory shock-capturing schemes. J. Comput. Phys. 1988, 77, 439–471. [Google Scholar] [CrossRef] [Green Version]
- Shu, C.-W.; Osher, S. Efficient implementation of essentially non-oscillatory shock-capturing schemes II. J. Comput. Phys. 1989, 83, 32–78. [Google Scholar] [CrossRef]
- Jiang, G.-S.; Shu, C.-W. Efficient implementation of Weighted ENO schemes. J. Comput. Phys. 1996, 126, 202–228. [Google Scholar] [CrossRef] [Green Version]
- Pawar, S.; San, O. CFD Julia: A Learning Module Structuring an Introductory Course on Computational Fluid Dynamics. Fluids 2019, 4, 159. [Google Scholar] [CrossRef] [Green Version]
- Roe, P.L. Approximate Riemann solvers, parameter vectors, and difference schemes. J. Comput. Phys. 1997, 135, 250–258. [Google Scholar] [CrossRef] [Green Version]
- Feng, H.; Hu, F.; Wang, R. A New Mapped Weighted Essentially Non-oscillatory Scheme. J. Sci. Comput. 2012, 51, 449–473. [Google Scholar] [CrossRef]
- Shu, C.-W. Essentially non-oscillatory and weighted essentially non-oscillatory schemes for hyperbolic conservation laws. In Advanced Numerical Approximation of Nonlinear Hyperbolic Equations, Lecture Notes in Mathematics; Cockburn, B., Johnson, C., Shu, C.-W., Tadmor, E., Quarteroni, A., Eds.; Springer: Berlin/Heidelberg, Germany, 1998; Volume 1697, pp. 325–432. [Google Scholar]
- Henrick, A.K.; Aslam, T.D.; Powers, J.M. Mapped weighted essentially non-oscillatory schemes: Achieving optimal order near critical points. J. Comput. Phys. 2005, 207, 542–567. [Google Scholar] [CrossRef]
- Aràndiga, F.; Baeza, A.; Belda, A.M.; Mulet, P. Analysis of WENO schemes for full and global accuracy. SIAM J. Numer. Anal. 2011, 49, 893–915. [Google Scholar] [CrossRef]
- Balsara, D.S.; Shu, C.-W. Monotonicity preserving weighted essentially non-oscillatory schemes with increasingly high order of accuracy. J. Comput. Phys. 2000, 160, 405–452. [Google Scholar] [CrossRef] [Green Version]
- Borges, R.; Carmona, M.; Costa, B.; Don, W.S. An improved weighted essentially non-oscillation scheme for hypebolic conservation laws. J. Comput. Phys. 2008, 227, 3191–3211. [Google Scholar] [CrossRef]
- Castro, M.; Costa, B.; Don, W.S. High order weighted essentially non-oscillatory WENO-Z schemes for hyperbolic conservation laws. J. Comput. Phys. 2011, 230, 1766–1792. [Google Scholar] [CrossRef]
- Gottlieb, S.; Shu, C.-W.; Tadmor, E. Strong stability-preserving time discretization methods. SIAM Rev. 2001, 43, 89–112. [Google Scholar] [CrossRef]
- Wang, B.-S.; Li, P.; Gao, Z.; Don, W.S. An improved fifth order alternative WENO-Z finite difference scheme for hyperbolic conservation laws. J. Comput. Phys. 2018, 374, 469–477. [Google Scholar] [CrossRef]
- Cravero, I.; Puppo, G.; Semplice, M.; Visconti, G. Cool WENO schemes. Comput. Fluids 2018, 169, 71–86. [Google Scholar] [CrossRef] [Green Version]
- Fu, L.; Xiangyu, Y.H.; Nikolaus, A.A. A new class of adaptive high-order targeted ENO schemes for hyperbolic conservation laws. J. Comput. Phys. 2018, 374, 724–751. [Google Scholar] [CrossRef]
- Godunov, S.K. A difference scheme for numerical computation of discontinuous solution of hyperbolic equation. Mat. Sbornik 1959, 47, 271–306. [Google Scholar]
- LeVeque, R.J. Balancing source terms and flux gradients on high-resolution Godunov methods: The quasi-steady wave-propagation algorithm. J. Comput. Phys. 1998, 146, 346–365. [Google Scholar] [CrossRef] [Green Version]
- Einfeldt, B. On Godunov-type methods for gas dynamics. SIAM J. Numer. Anal. 1988, 25, 294–318. [Google Scholar] [CrossRef]
- Wu, Y.Y.; Cheung, K.F. Explicit solution to the exact Riemann problem and application in nonlinear shallow-water equations. Int. J. Numer. Meth. Fluids 2008, 57, 1649–1668. [Google Scholar] [CrossRef]
- Fritz, J. Partial Differential Equations, 4th ed.; Springer: New York, NY, USA, 1991; ISBN 978-0-387-90609-6. [Google Scholar]
- Guinot, V. Riemann solvers for water hammer simulations by Godunov method. Int. J. Numer. Methods Eng. 2000, 49, 851–870. [Google Scholar] [CrossRef]
- Pal, S.; Hanmaiahgari, P.R.; Karney, B.W. An Overview of the Numerical Approaches to Water Hammer Modelling: The Ongoing Quest for Practical and Accurate Numerical Approaches. Water 2021, 13, 1597. [Google Scholar] [CrossRef]
- Byrne, F.N.; Ellison, M.A.; Reid, J.H. The particle-in-cell computing method for fluid dynamics. Methods Comput. Phys. 1964, 3, 319–343. [Google Scholar] [CrossRef]
- Levato, T.; Goncalves, L.V.; Giannini, V. Laser-Plasma Accelerated Protons: Energy Increase in Gas-Mixtures Using High Mass Number Atomic Species. Fluids 2019, 4, 150. [Google Scholar] [CrossRef] [Green Version]
- Błoński, D.; Strzelecka, K.; Kudela, H. Vortex Trapping Cavity on Airfoil: High-Order Penalized Vortex Method Numerical Simulation and Water Tunnel Experimental Investigation. Energies 2021, 14, 8402. [Google Scholar] [CrossRef]
- Meli, A.; Nishikawa, K.-I. Particle-in-Cell Simulations of Astrophysical Relativistic Jets. Universe 2021, 7, 450. [Google Scholar] [CrossRef]
- Mellmann, M.; Scholle, M. Symmetries and Related Physical Balances for Discontinuous Flow Phenomena within the Framework of Lagrange Formalism. Symmetry 2021, 13, 1662. [Google Scholar] [CrossRef]
- Toro, F.E. Riemann Solvers and Numerical Methods for Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 2009; ISBN 3-540-65966-8. [Google Scholar]
- Courant, R.; Hilbert, D. Methods of Mathematical Physics: Partial Differential Equations; Wiley: Singapore, 1989; Volume II, ISBN 0-4-71-50439-4. [Google Scholar]
- Inviscid Burgers’ Equation and Its Numerical Solutions. Available online: https://etd.lib.metu.edu.tr/upload/12621609/index.pdf (accessed on 17 December 2021).
- Liu, X.-D.; Osher, S. Nonoscillatory high order accurate self-similar maximum principle satisfying shock capturing schemes I. SIAM J. Numer. Anal. 1996, 33, 760–779. [Google Scholar] [CrossRef] [Green Version]
- Carmouze, Q.; Saurel, R.; Chiapolino, A.; Lapebie, E. Riemann solver with internal reconstruction (RSIR) for compressible single-phase and non-equilibrium two-phase flows. J. Comput. Phys. 2020, 408, 109–176. [Google Scholar] [CrossRef] [Green Version]
- Sod, G.A. A survey of several finite difference methods for systems of nonlinear hyperbolic conservation laws. J. Comput. Phys. 1978, 107, 1–31. [Google Scholar] [CrossRef] [Green Version]
- Lax, P.D. Weak solutions of nonlinear hyperbolic equations and their numerical computation. Commun. Pure Appl. Math. 1954, 7, 159–193. [Google Scholar] [CrossRef]
- Taylor, E.M.; Wu, M.; Martin, M.P. Optimization of Nonlinear Error for Weighted Essentially Non-Oscillatory Methods in Direct Numerical Simulations of Compressible Turbulence. J. Comput. Phys. 2007, 223, 384–397. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nikonov, V. A Semi-Lagrangian Godunov-Type Method without Numerical Viscosity for Shocks. Fluids 2022, 7, 16. https://doi.org/10.3390/fluids7010016
Nikonov V. A Semi-Lagrangian Godunov-Type Method without Numerical Viscosity for Shocks. Fluids. 2022; 7(1):16. https://doi.org/10.3390/fluids7010016
Chicago/Turabian StyleNikonov, Valeriy. 2022. "A Semi-Lagrangian Godunov-Type Method without Numerical Viscosity for Shocks" Fluids 7, no. 1: 16. https://doi.org/10.3390/fluids7010016
APA StyleNikonov, V. (2022). A Semi-Lagrangian Godunov-Type Method without Numerical Viscosity for Shocks. Fluids, 7(1), 16. https://doi.org/10.3390/fluids7010016