
Development of an Algebraic Model of Empirical Parameterization of Near Wakes around a Vehicle

Abstract
1. Introduction
2. Numerical Methods
2.1. Computational Procedure of the MASCON Model
2.2. Algebraic Models of Empirical Parameterization
2.3. Computational Fluid Dynamics Model (CFD)
3. Test Case and Computational Conditions
3.1. Test Cases of Wind Tunnel Tests with 25% Scaled Model of the DrivAer Model
3.2. Computational Conditions
4. Results and Discussion
4.1. Estateback Model
4.2. Fastback Model
4.3. Notchback Model
4.4. Practicality
4.4.1. Accuracy
4.4.2. Computational Costs
5. Conclusions
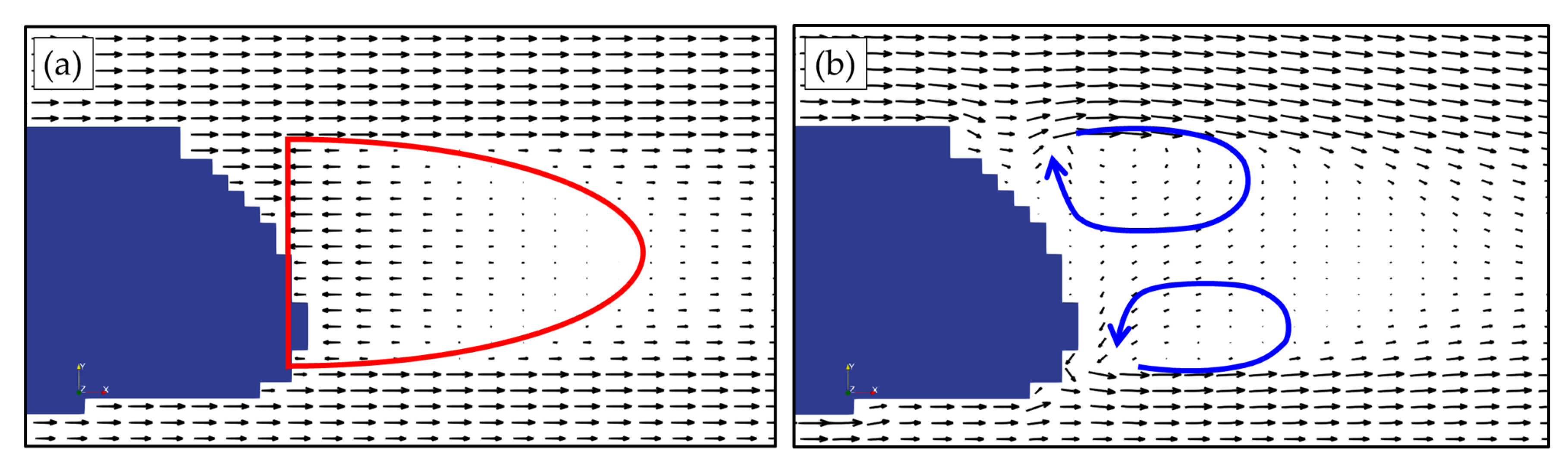
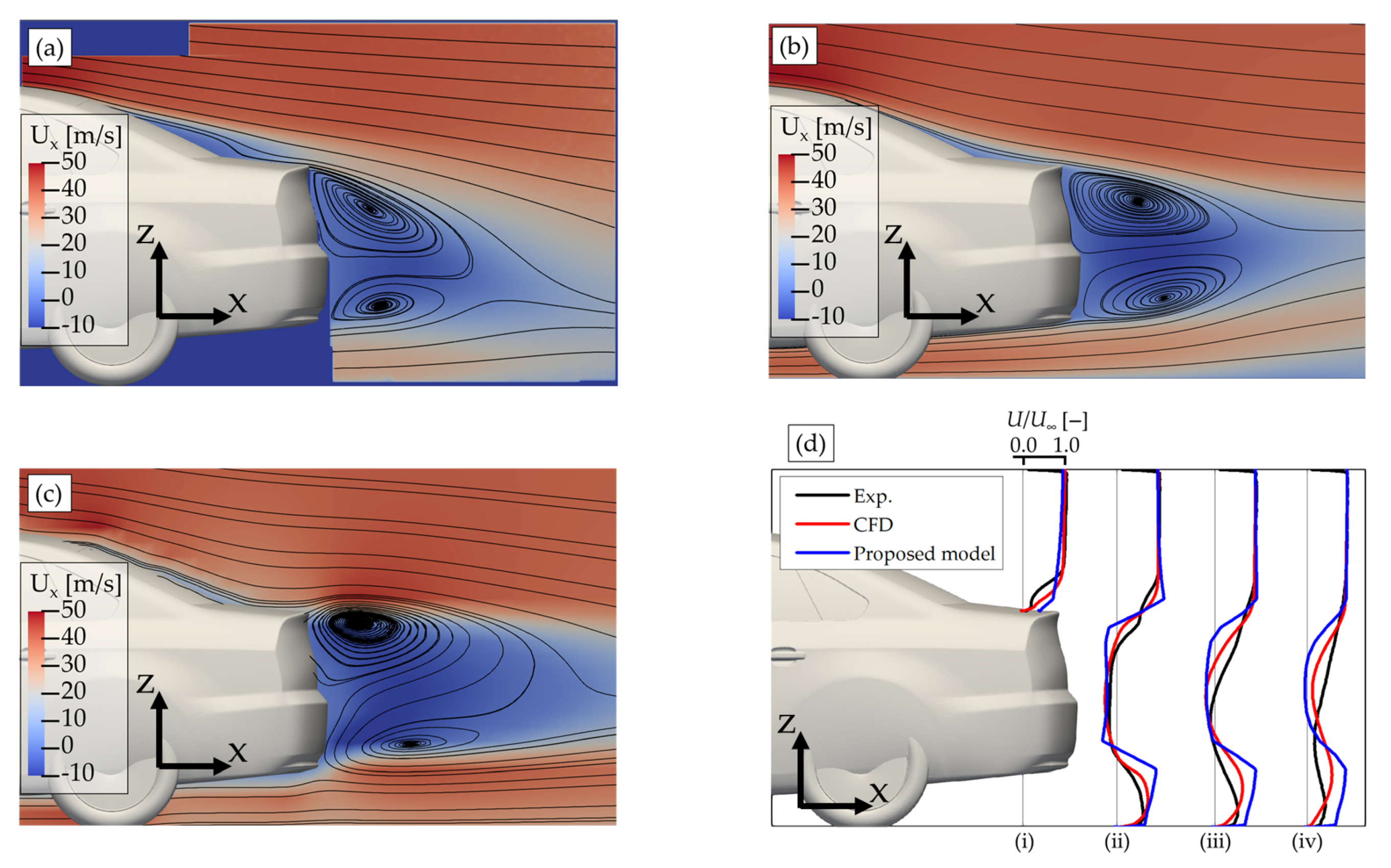
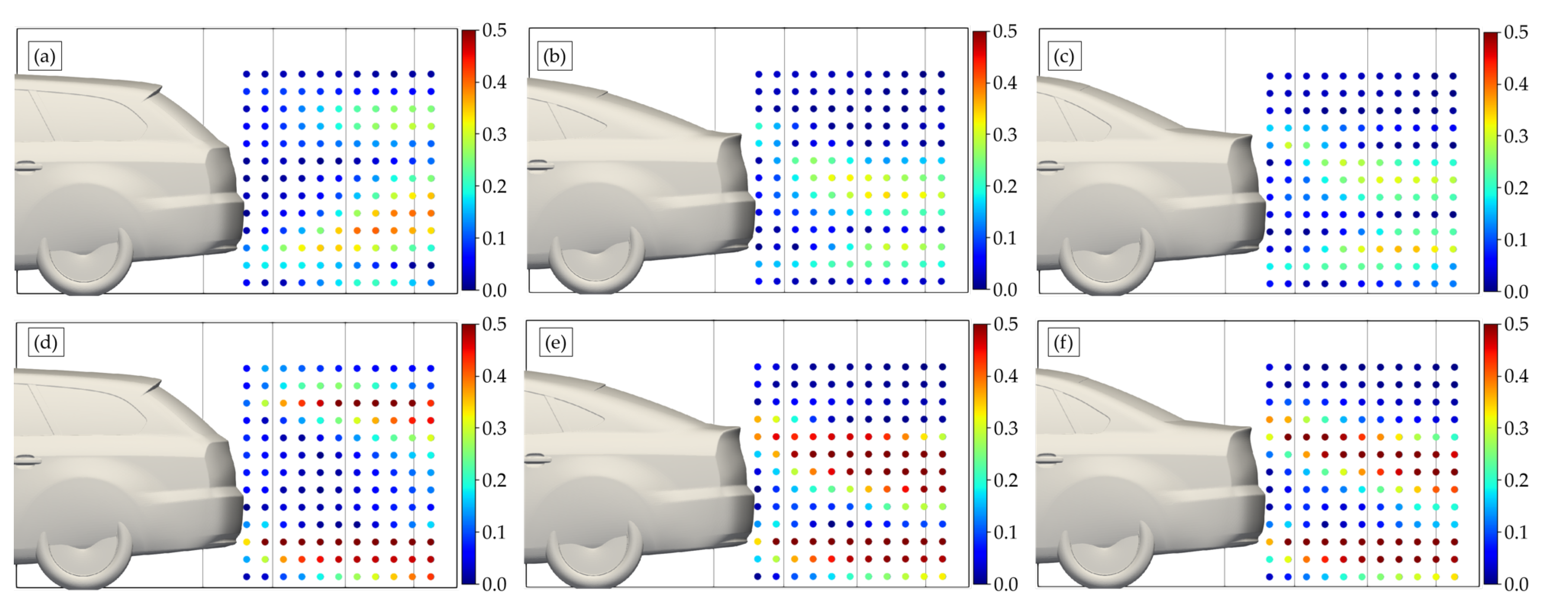
- In general, our algebraic model that was implemented in the MASCON model successfully reproduces two recirculation vortices in the near-wake region of the vehicle for the three vehicle shapes.
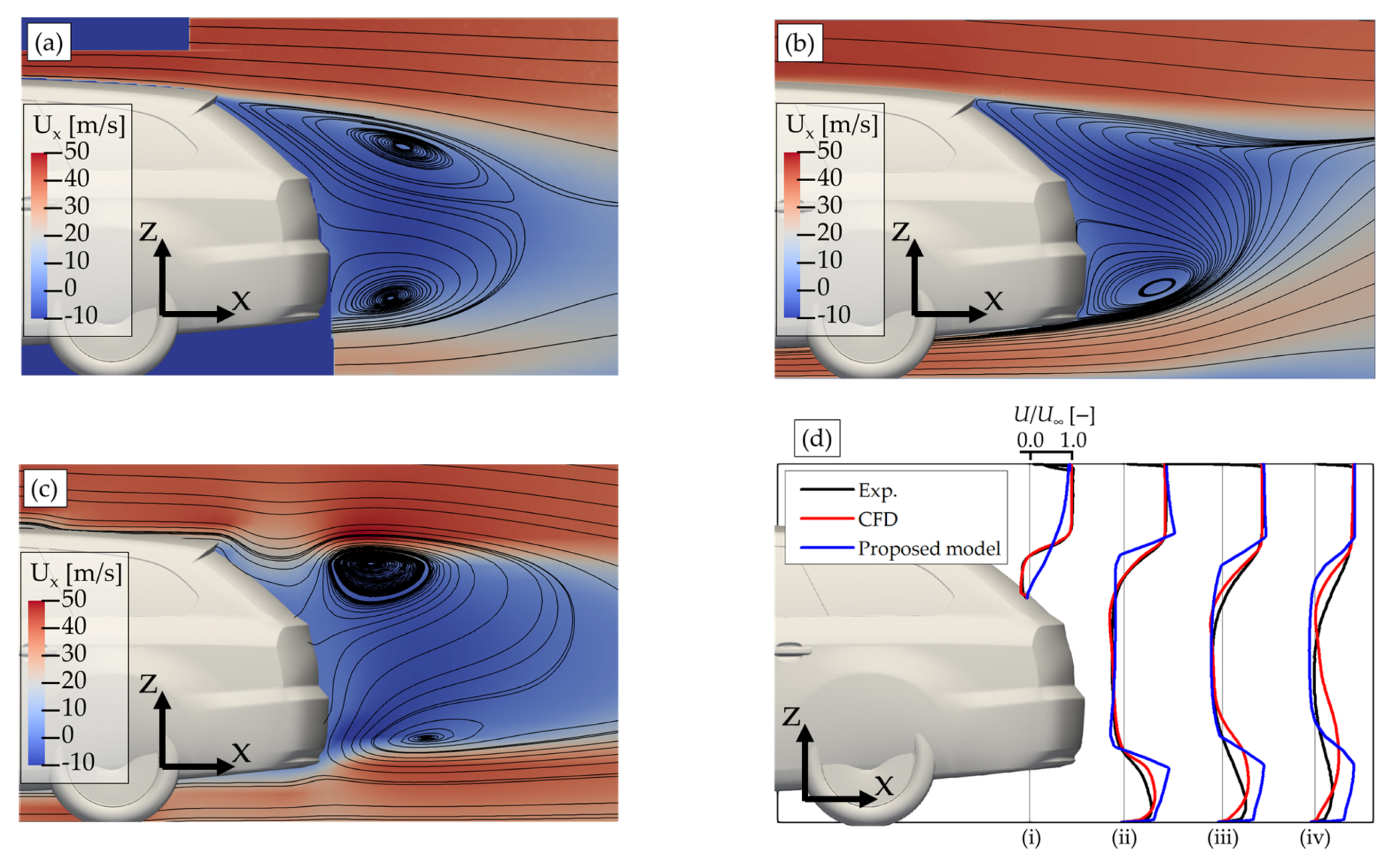
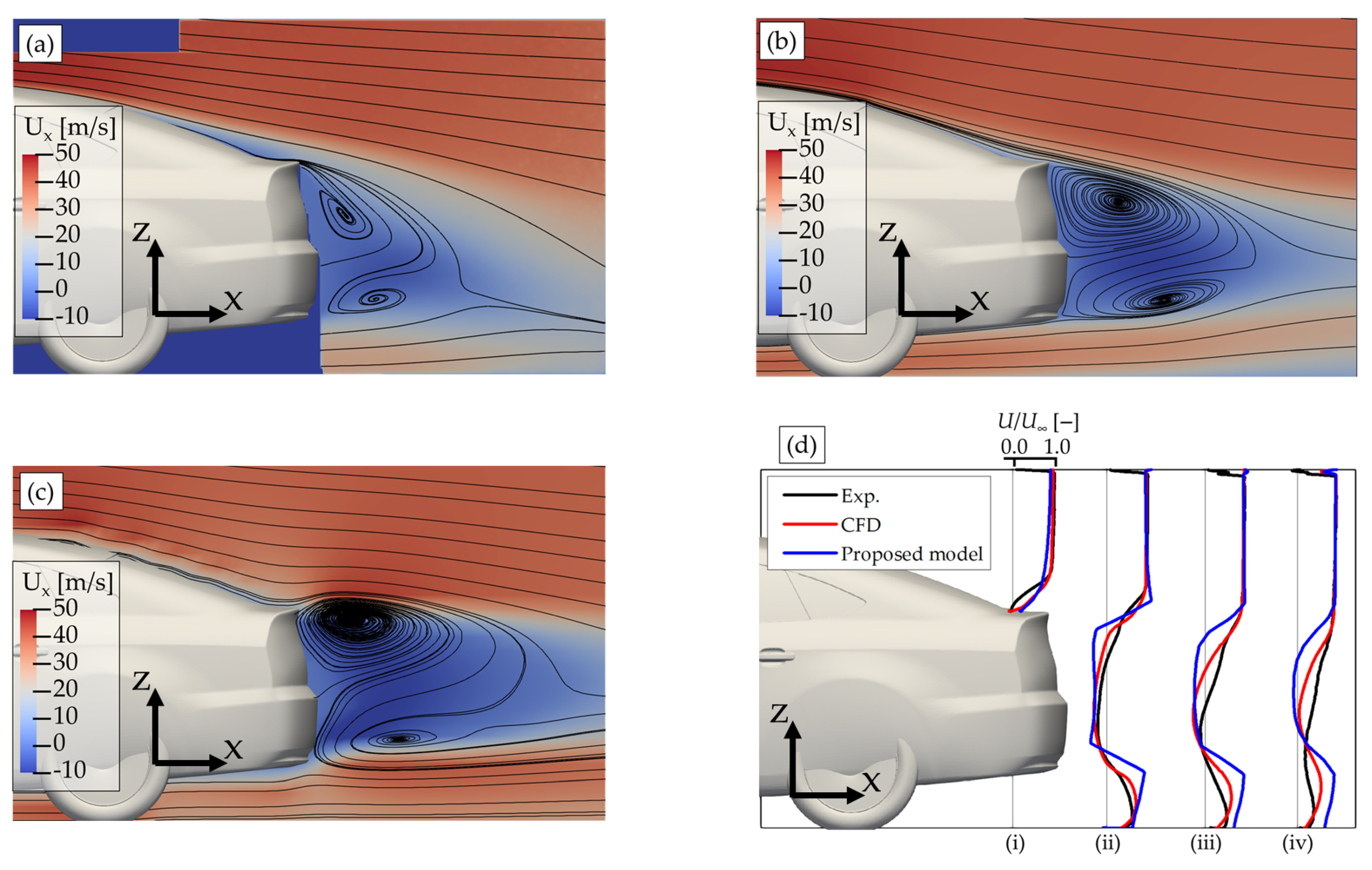
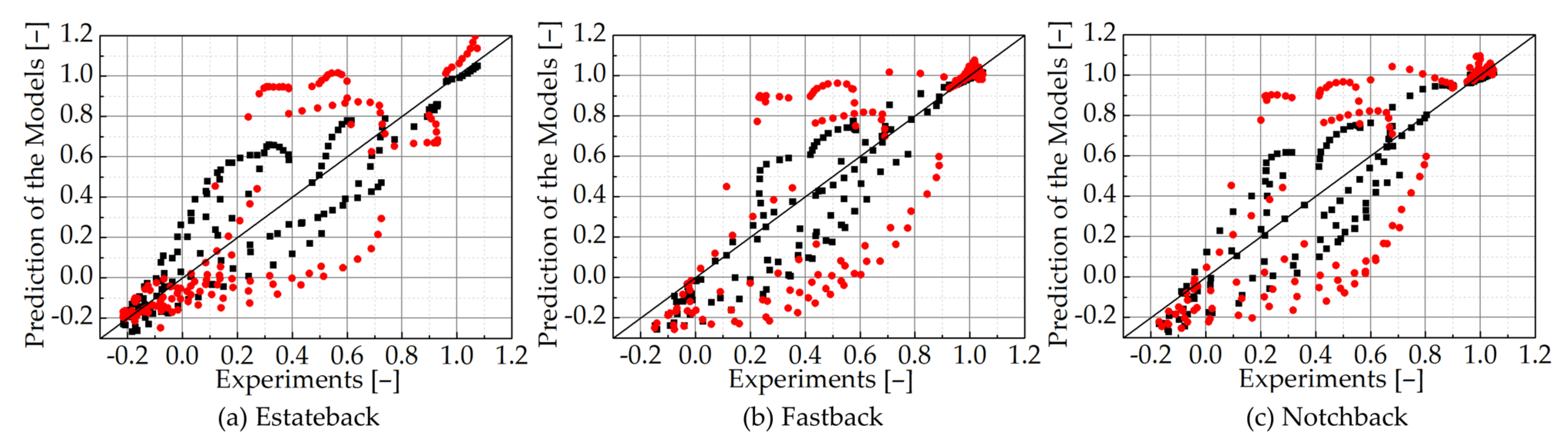
- The proposed method reproduces the flow pattern of the estateback model better than the other two vehicle models. However, the CFD model reproduces the flow pattern of the experiments better than our proposed method in the fastback and notchback models.
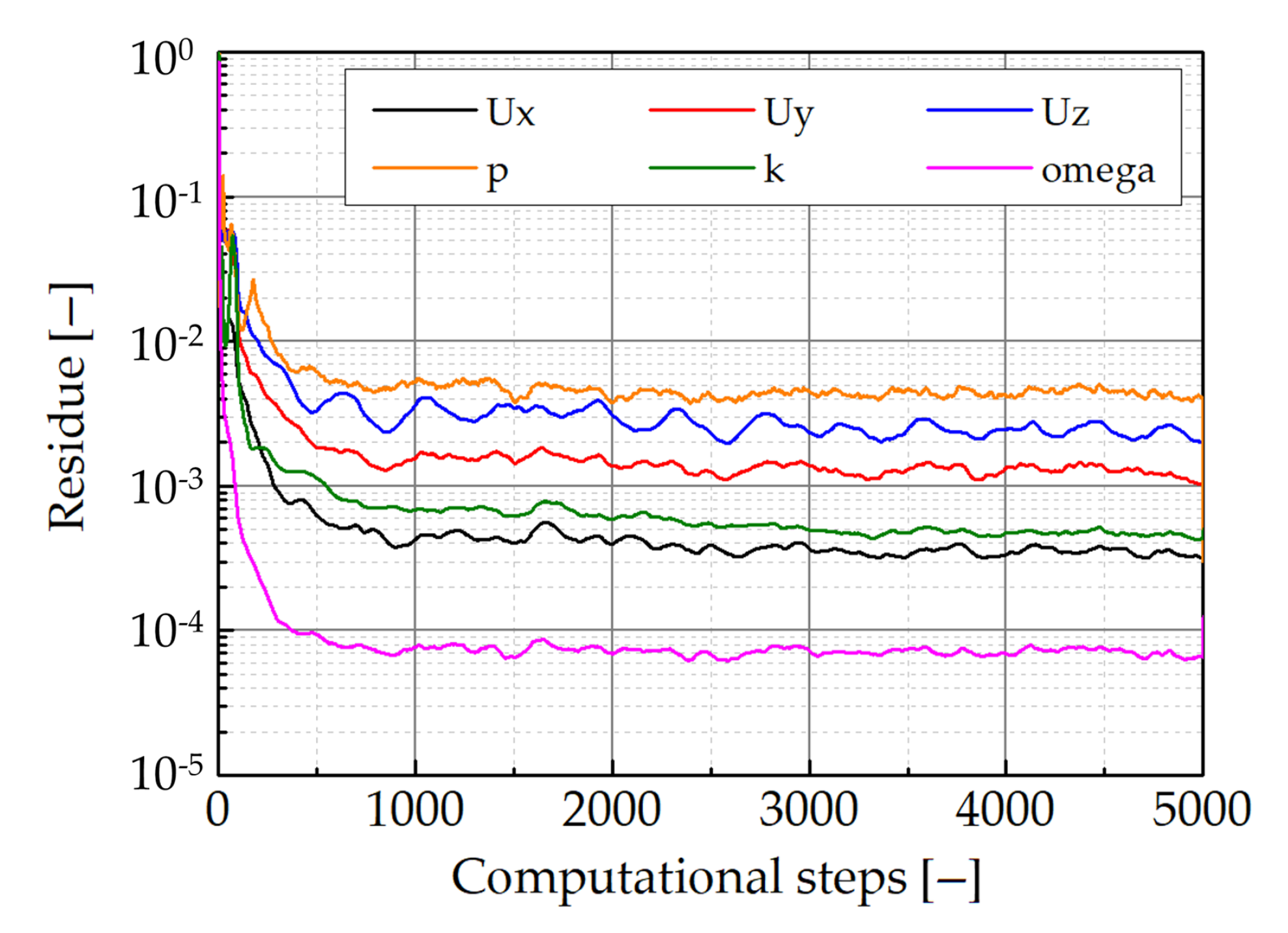
- In the CFD model, the residues are almost constant from approximately 1000 iterations, and they have never reduced below the criterion for determining the steady-state solution. Therefore, we have regarded the solution by averaging over the additional 1000 steps from the end of the simulation. If we assume that the time elapsed to reach 5000 steps is the computational times in the CFD model, then it takes approximately 300 times longer than the proposed method.
- The accuracy of reproducibility for the fastback and notchback while using the proposed method may be improved by revising the algebraic model to account for the rear shape of the vehicle.
- We conclude that the proposed method is practical in terms of the computational costs. Therefore, the algebraic model combined with the MASCON model would be a promising model that alternates the CFD model, by further improvement of the reproducibility.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| OpenMP | Open Multi-Processing |
| API | Application Programming Interface |
| OpenFOAM | Open-source Field Operation And Manipulation |
| MPI | Message Passing Interface |
| CAD | Computer Aided Design |
| SIMPLE | Semi-Implicit Method for Pressure-Linked Equations |
| GAMG | Geometric agglomerated Algebraic Multi-Grid |
| PBiCGStab | Preconditioned Bi-Conjugate Gradient Stabilized |
| DILU | Diagonal Incomplete LU decomposition |
References
- Dickerson, M.H. MASCON—A Mass Consistent Atmospheric Flux Model for Regions with Complex Terrain. J. Appl. Meteor 1978, 17, 241–253. [Google Scholar] [CrossRef]
- Sherman, C.A. A Mass-Consistent Model for Wind Fields Over Complex Terrain. J. Appl. Meteor 1978, 17, 312–319. [Google Scholar] [CrossRef]
- Röckle, R. Bestimmung der Stomungsverhaltnisse im Bereich Komplexer Bebauugsstruckturen. Ph.D. Thesis, Vom Fachbereich Mechanik, der Technischen Hochschule Darmstadt, Darmstadt, Germany, 1990. [Google Scholar]
- VDI 3783 Blatt 10: Diagnostische Mikroskalige Windfeldmodelle—Gebäude und Hindernisumströmung. Available online: https://www.vdi.de/richtlinien/programme/inhalte-zu-richtlinien/vdi-3783-blatt-10-dmw (accessed on 21 November 2020).
- Los Alamos National Laboratory (LANL), The Quick Urban & Industrial Complex (QUIC) Dispersion Modeling System. Available online: https://www.lanl.gov/projects/quic/ (accessed on 21 November 2020).
- Eskridge, R.E.; Hunt, J.C.R. Highway modeling. Part I: Prediction of velocity and turbulence fields in the wake of vehicles. J. Appl. Meteor 1979, 18, 387–400. [Google Scholar] [CrossRef]
- Carpentieri, M.; Kumar, P.; Robins, A. Wind tunnel measurements for dispersion modelling of vehicle wakes. Atmos. Environ. 2012, 62, 9–25. [Google Scholar] [CrossRef]
- Varney, M.; Passmore, M.; Wittmeier, F.; Kuthada, T. DrivAer Experimental Aerodynamic Dataset. Loughborough University. Dataset. Available online: https://doi.org/10.17028/rd.lboro.12881213.v1 (accessed on 21 November 2020).
- Van der Vorst, H.A. Bi-CGSTAB: A Fast and Smoothly Converging Variant of Bi-CG for the Solution of Nonsymmetric Linear Systems. SIAM J. Sci. Stat. Comput. 1992, 13, 631–644. [Google Scholar] [CrossRef]
- Frankel, S.P. Convergence rates of iterative treatments of partial differential equations. Math. Tables Aids Comput. 1950, 4, 65–75. [Google Scholar] [CrossRef]
- Young, D.M. Iterative Methods for Solving Partial Differential Equations of Elliptic Type. Ph.D. Thesis, Harvard University, Cambridge, MA, USA, 1950. [Google Scholar]
- Fackrell, J.E.; Pearce, J.E. Parameters Affecting Dispersion in the Near Wake of Buildings; CEGB Report; RD/M/1179/N81; Marchwood Engineering Laboratories, Central Electricity Generating Board: London, UK, 1981; Available online: http://hdl.handle.net/10068/664612 (accessed on 21 November 2020).
- Oka, H. Application of a Diagnostic Urban Wind Model to Indoor Airflow Simulations—Model Evaluation against Flow around a Surface-Mounted Cube in a Plane Channel. J. JIME 2014, 49, 142–150. (In Japanese) [Google Scholar] [CrossRef]
- Hussein, H.J.; Martinuzzi, R.J. Energy Balance for Turbulent Flow around a Surface Mounted Cube Placed in a Channel. Phys. Fluids 1996, 8, 764–780. [Google Scholar] [CrossRef]
- Singh, B.; Pardyjak, E.R.; Brown, M.J. Testing of a Far-wake Parameterization for a Fast Response Urban Wind Model. In Proceedings of the 6th Symposium on the Urban Environment/14th Joint Conference on the Applications of Air Pollution Meteorology With the Air and Waste Management Association Atlanta, Atlanta, Georgia, 2 February 2006; Volume 11. [Google Scholar]
- Heft, A.; Indinger, T.; Adams, N. Investigation of unsteady flow structures in the wake of a realistic generic car model. In Proceedings of the 29th AIAA Applied Aerodynamics Conference, Honolulu, HI, USA, 27–30 June 2011. [Google Scholar]
- Snyder, W.H. Guideline for Fluid Modeling of Atmospheric Diffusion; U.S. EPA Report No.EPA-600/8-81-009; Environmental Sciences Research Laboratory, Office of Research and Development, US Environmental Protection Agency: Durham, NC, USA, 1981. [Google Scholar]
- Solmaz, H.; İçingür, Y. Drag Coefficient Determination of a Bus Model Using Reynolds Number Independence. Int. J. Automot. Eng. Technol. 2015, 4, 146–151. [Google Scholar] [CrossRef][Green Version]
- Strangfeld, C.; Wieser, D.; Schmidt, H.J.; Woszidlo, R.; Nayeri, C.; Paschereit, C. Experimental Study of Baseline Flow Characteristics for the Realistic Car Model DrivAer; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2013. [Google Scholar]
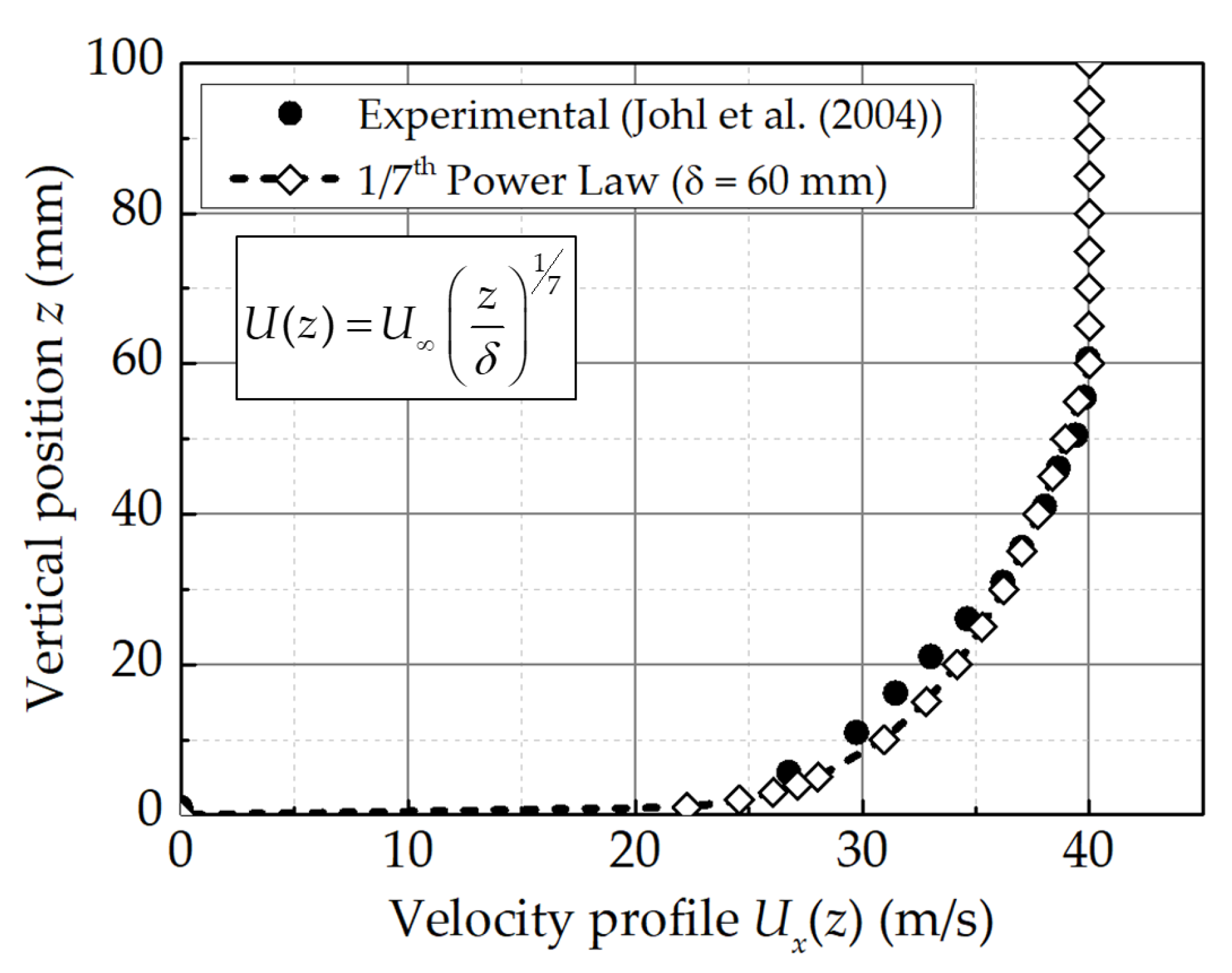
- Johl, G.; Passmore, M.; Render, P. Design methodology and performance of an indraft wind tunnel. Aeronaut. J. 2004, 108, 465–473. [Google Scholar] [CrossRef]
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten Years of Industrial Experience with the SST Turbulence Model. Turbul. Heat Mass Transf. 2003, 4, 625–632. [Google Scholar]
- Menter, F.R.; Esch, T. Elements of Industrial Heat Transfer Prediction. In Proceedings of the 16th Brazilian Congress of Mechanical Engineering (COBEM), Uberlandia, Brazil, 26–30 November 2001.
- Simmonds, N.; Pitman, J.; Tsoutsanis, P.; Jenkins, J.; Gaylard, A.; Jansen, W. Complete Body Aerodynamic Study of three Vehicles. In Proceedings of the WCX17: SAE World Congress Experience, Detroit, MI, USA, 4–6 April 2017. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| U | p | |
|---|---|---|
| Inlet () | type codedFixedValue; value uniform (0 0 0); redirectType velocityProfileInlet; | type zeroGradient; |
| Outlet () | type zeroGradient; value uniform (0 0 0 ); | type fixedValue; value uniform 0.0 |
| Symmetric plane () | type symmetry; | type symmetry; |
| type slip; | type slip; | |
| Ground () | type fixedValue; value uniform (0 0 0); | type zeroGradient; |
| type slip; | type slip; | |
| Vehicle body | type fixedValue; value uniform (0 0 0); | type zeroGradient; |
| k | Omega | Nut | |
|---|---|---|---|
| Inlet () | type fixedValue; | type fixedValue; | type zeroGradient; |
| Outlet () | type zeroGradient; | type zeroGradient; | type zeroGradient; |
| Symmetric plane () | type symmetry; | type symmetry; | type symmetry; |
| type slip; | type slip; | type slip; | |
| Ground () | type kqRWallFunction; | type omegaWallFunction; | type nutUSpaldingWallFunction; |
| type slip; | type slip; | type slip; | |
| Vehicle body | type kqRWallFunction; | type omegaWallFunction; | type nutUSpaldingWallFunction; |
| Discretisation | Scheme | |
|---|---|---|
| ddtScheme | steadyState | |
| Gradient | cellLimited Gauss linear 1 | |
| Divergence | div(phi,U) | bounded Gauss linearUpwindV grad(U) |
| div(phi,k) | bounded Gauss upwind | |
| div(phi,omega) | bounded Gauss upwind | |
| div((nuEff*dev(grad(U).T()))) | Gauss linear | |
| Laplacian | Gauss linear limited 0.5 | |
| Vehicle Model | Computational Times | ||
|---|---|---|---|
| = 0.025 m | = 0.0166 m | = 0.0125 m | |
| Estateback | 7.49 s | 28.5 s | 75.5 s |
| Fastback | 8.53 s | 25.0 s | 64.5 s |
| Notchback | 9.24 s | 30.8 s | 76.3 s |
| Model | Computational | Vehicle | Root Mean | Computational |
|---|---|---|---|---|
| Environments | Type | Square Error | Times | |
| Intel Xeon Gold 6154 | Estateback | 0.178 | 9052 s | |
| CFD | 2 CPUs (36 Cores/72 Threads) | Fastback | 0.148 | 9543 s |
| Parallelized by MPI | Notchback | 0.155 | 9137 s | |
| Present | AMD Ryzen 9 4900HS | Estateback | 0.273 | 28.5 s |
| method | 1 CPU (8 Cores/16 Threads) | Fastback | 0.329 | 25.0 s |
| ( = 0.0166 m) | Parallelized by OpenMP | Notchback | 0.316 | 30.8 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kimura, A.; Asami, M.; Oka, H.; Oka, Y. Development of an Algebraic Model of Empirical Parameterization of Near Wakes around a Vehicle. Fluids 2021, 6, 75. https://doi.org/10.3390/fluids6020075
Kimura A, Asami M, Oka H, Oka Y. Development of an Algebraic Model of Empirical Parameterization of Near Wakes around a Vehicle. Fluids. 2021; 6(2):75. https://doi.org/10.3390/fluids6020075
Chicago/Turabian StyleKimura, Arata, Mitsufumi Asami, Hideyuki Oka, and Yasushi Oka. 2021. "Development of an Algebraic Model of Empirical Parameterization of Near Wakes around a Vehicle" Fluids 6, no. 2: 75. https://doi.org/10.3390/fluids6020075
APA StyleKimura, A., Asami, M., Oka, H., & Oka, Y. (2021). Development of an Algebraic Model of Empirical Parameterization of Near Wakes around a Vehicle. Fluids, 6(2), 75. https://doi.org/10.3390/fluids6020075