Aerodynamic Investigation of a Morphing Wing for Micro Air Vehicle by Means of PIV



Abstract
1. Introduction
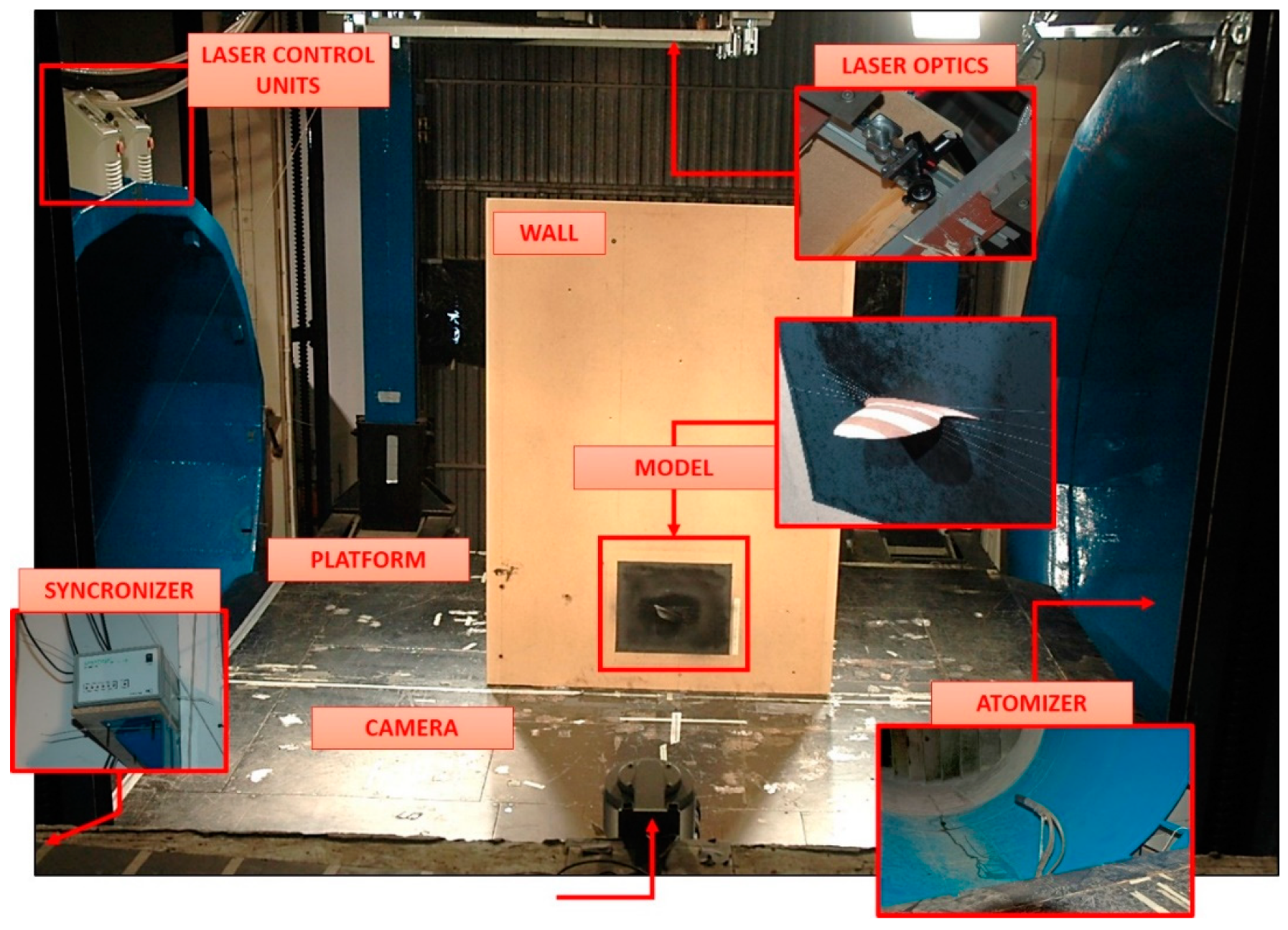
2. Description of the Experimental Setup
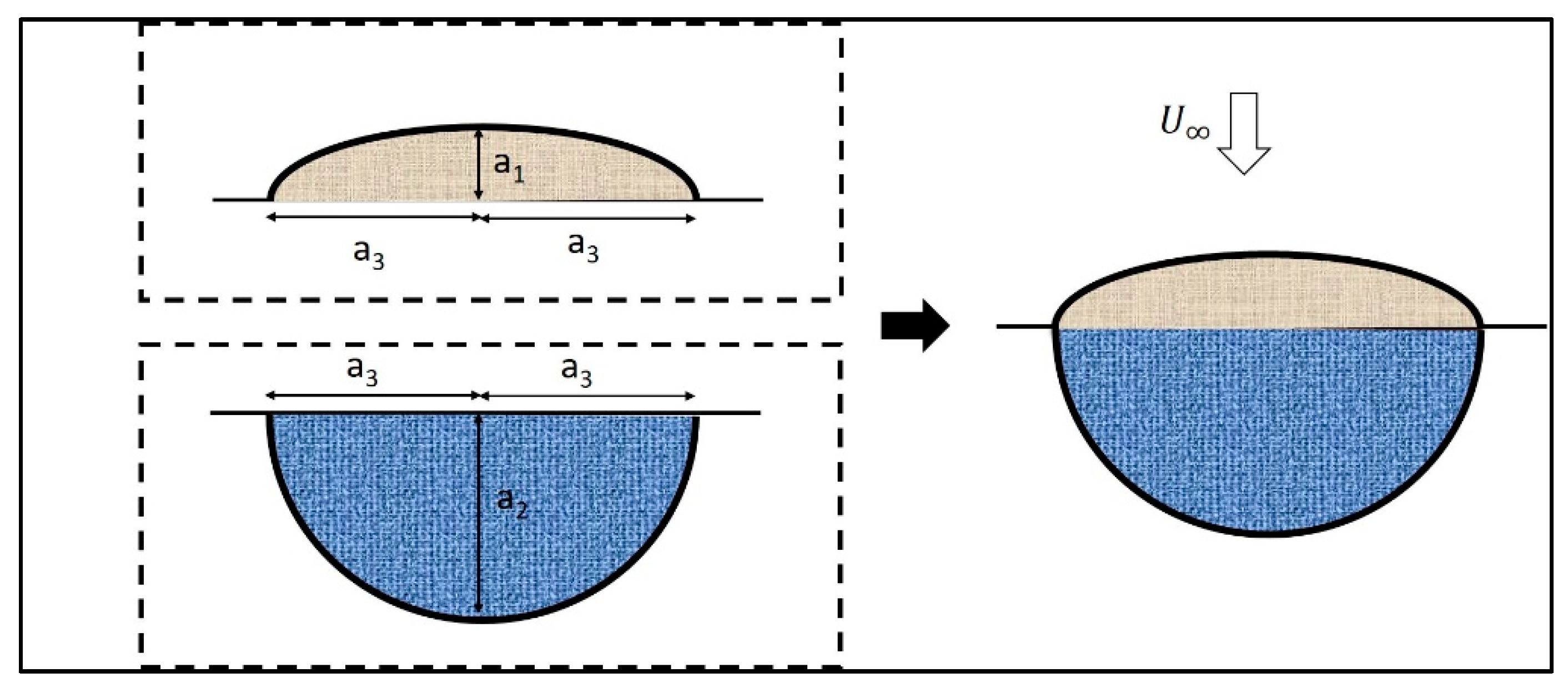
2.1. The Morphing Model
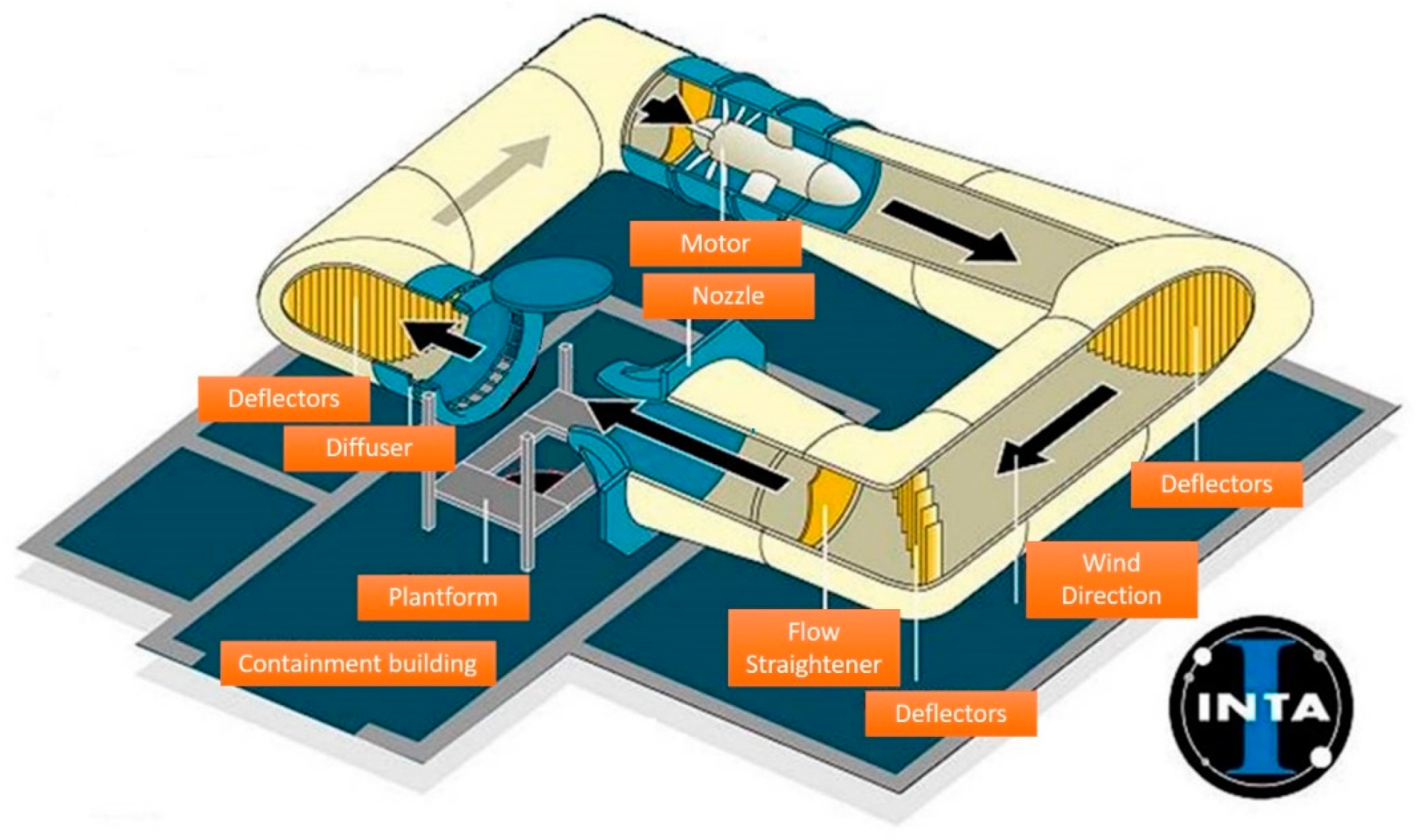
2.2. The Wind Tunnel
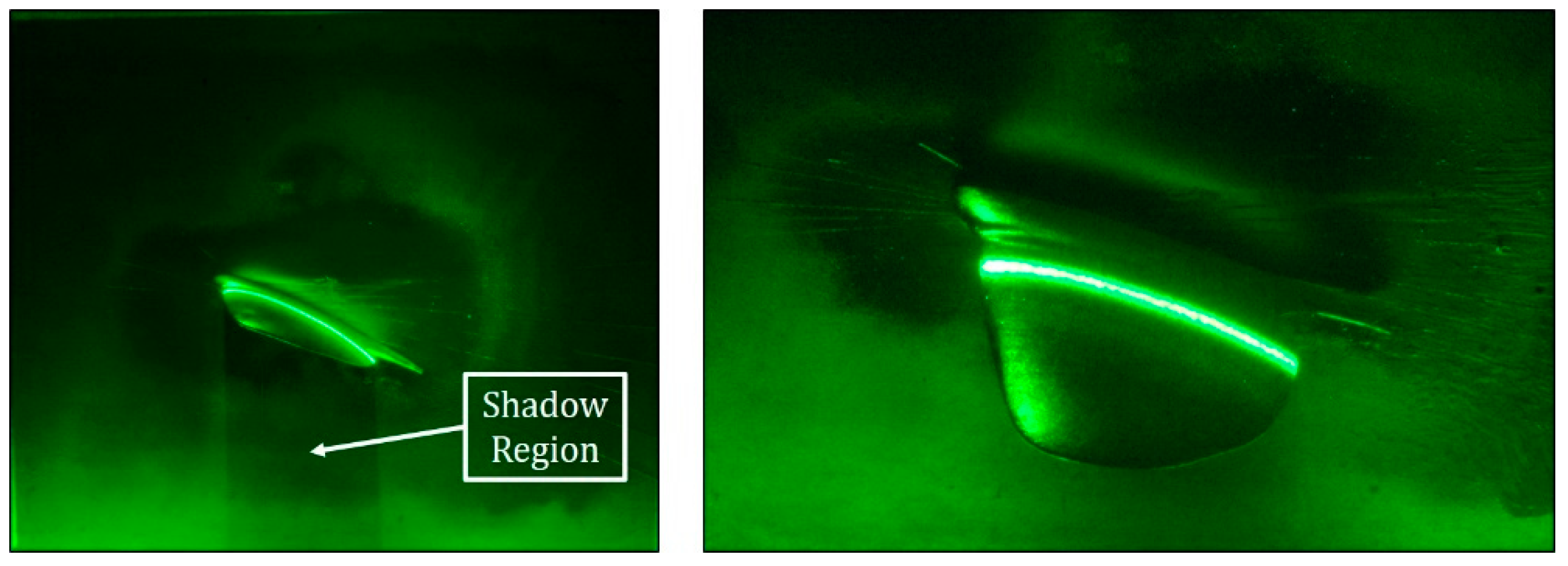
2.3. PIV Measurements
3. Results and Discussion
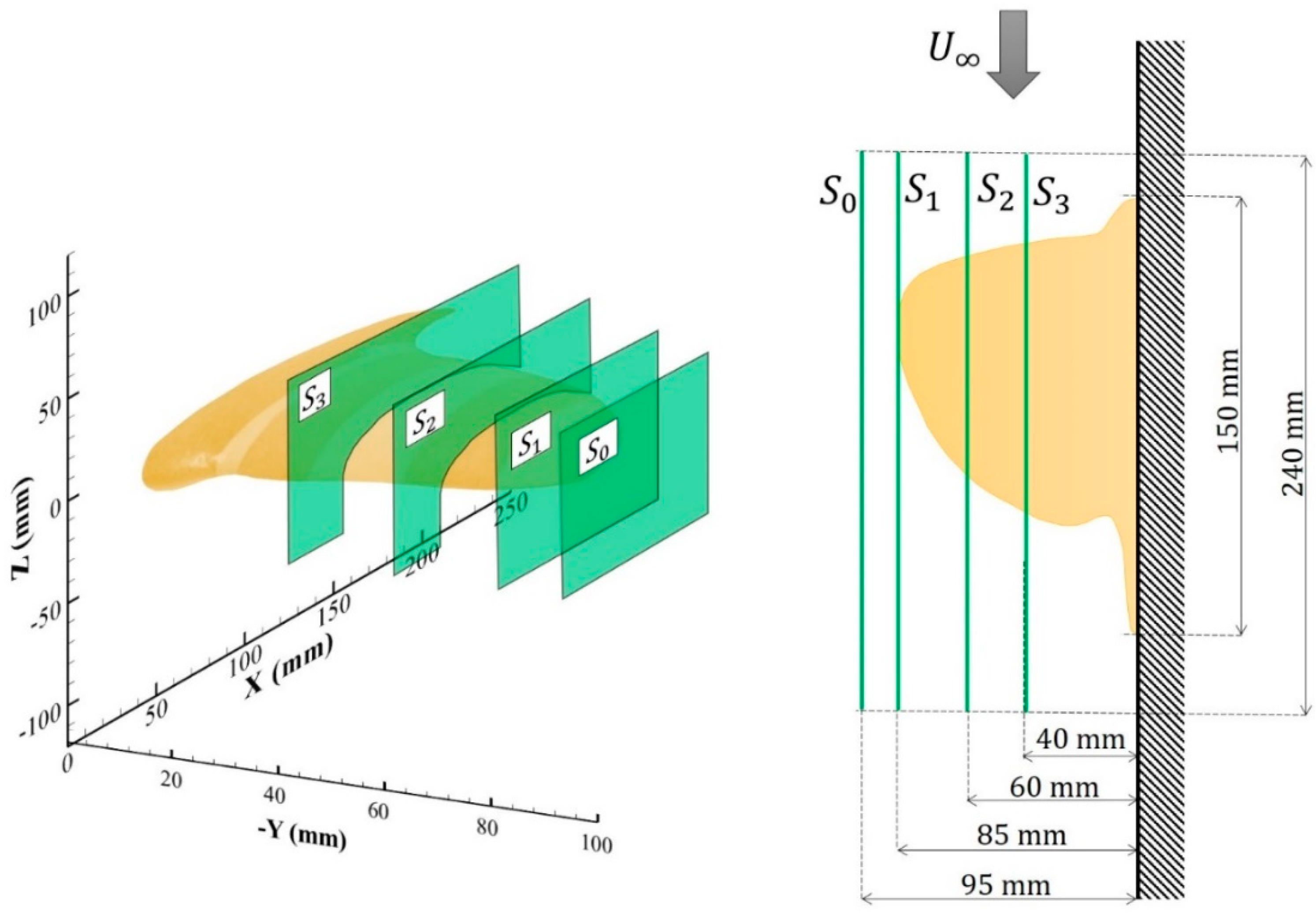
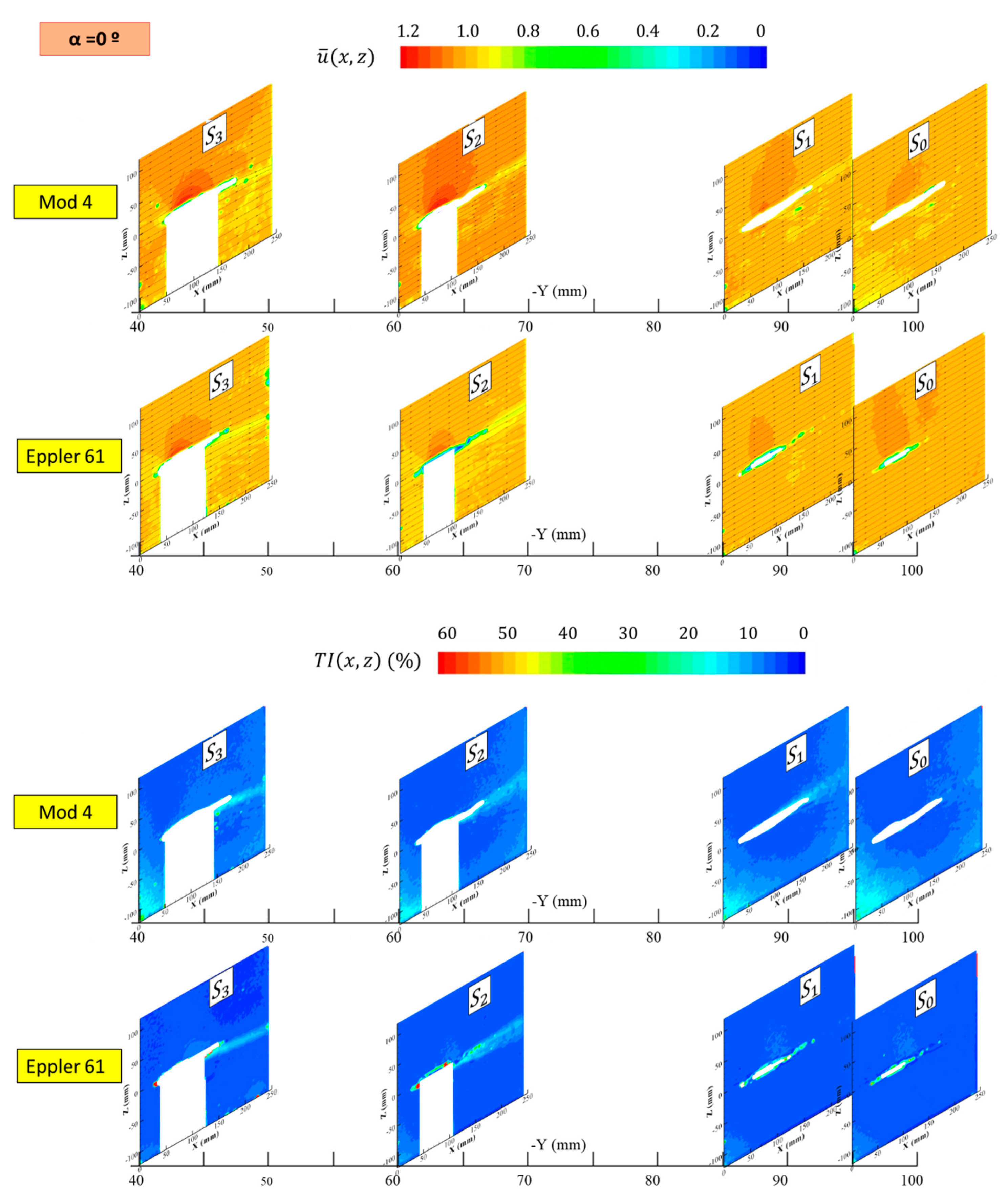
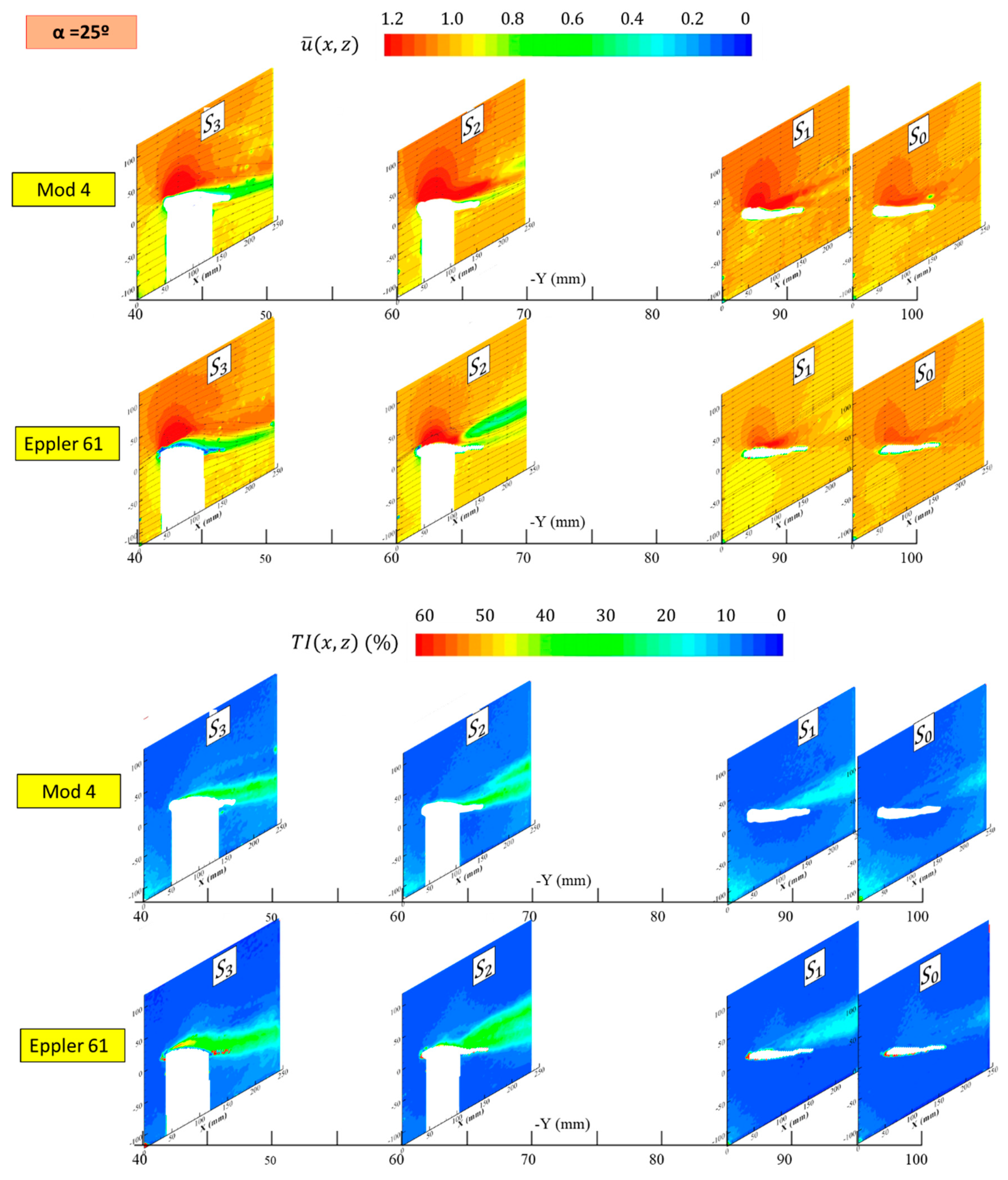
- Test section distance to the wall: 40 (S3), 60 (S2), 85 (S1), and 95 mm (S0). Each test section corresponds to planes parallel to the wall placed in the symmetric plane of the morphing model (See Figure 6)
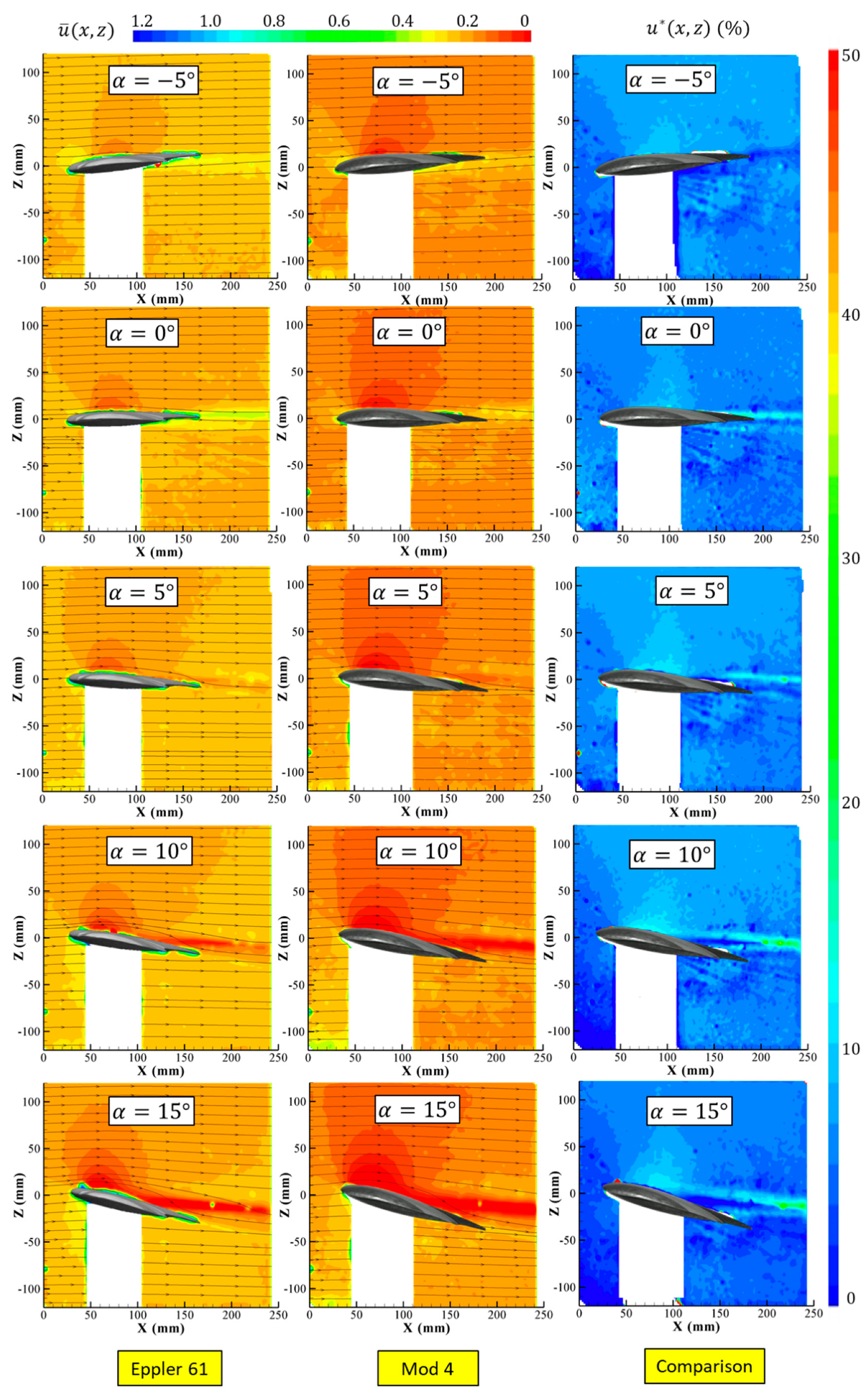
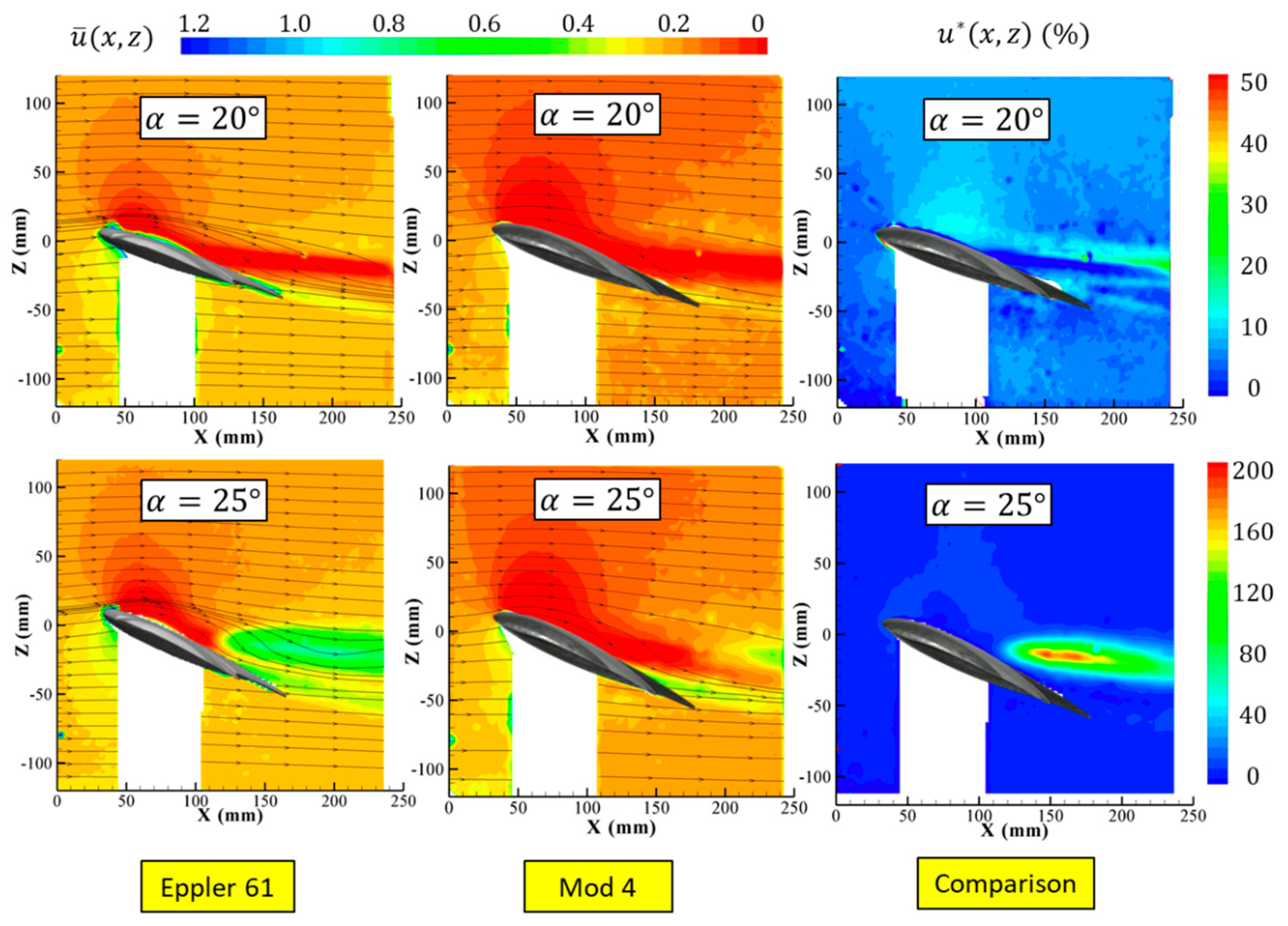
- The angle of attack of the model: 0°, 5°, 10°, 15°, 20°, and 25°
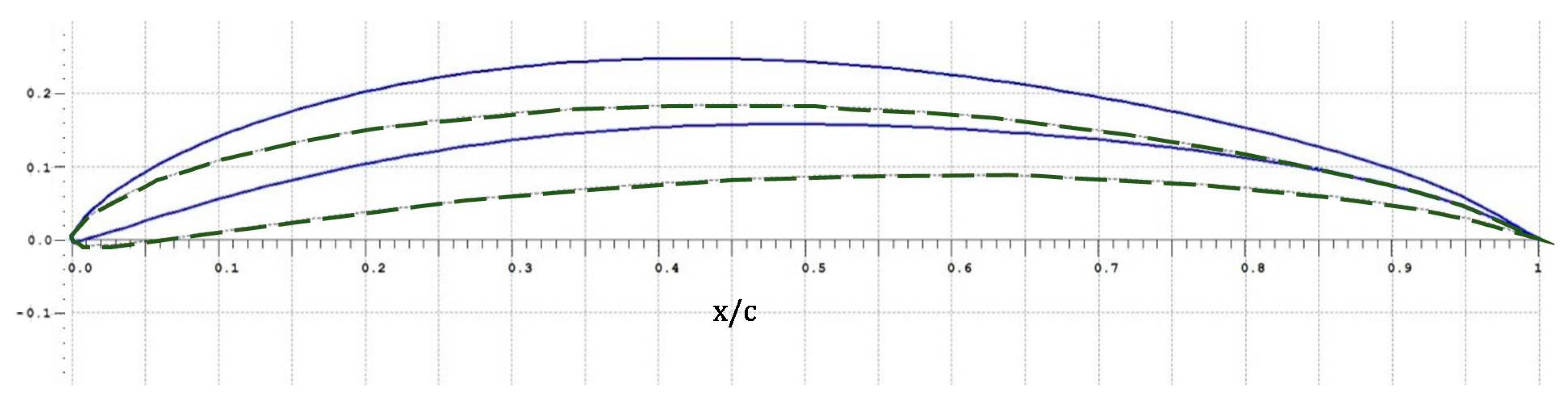
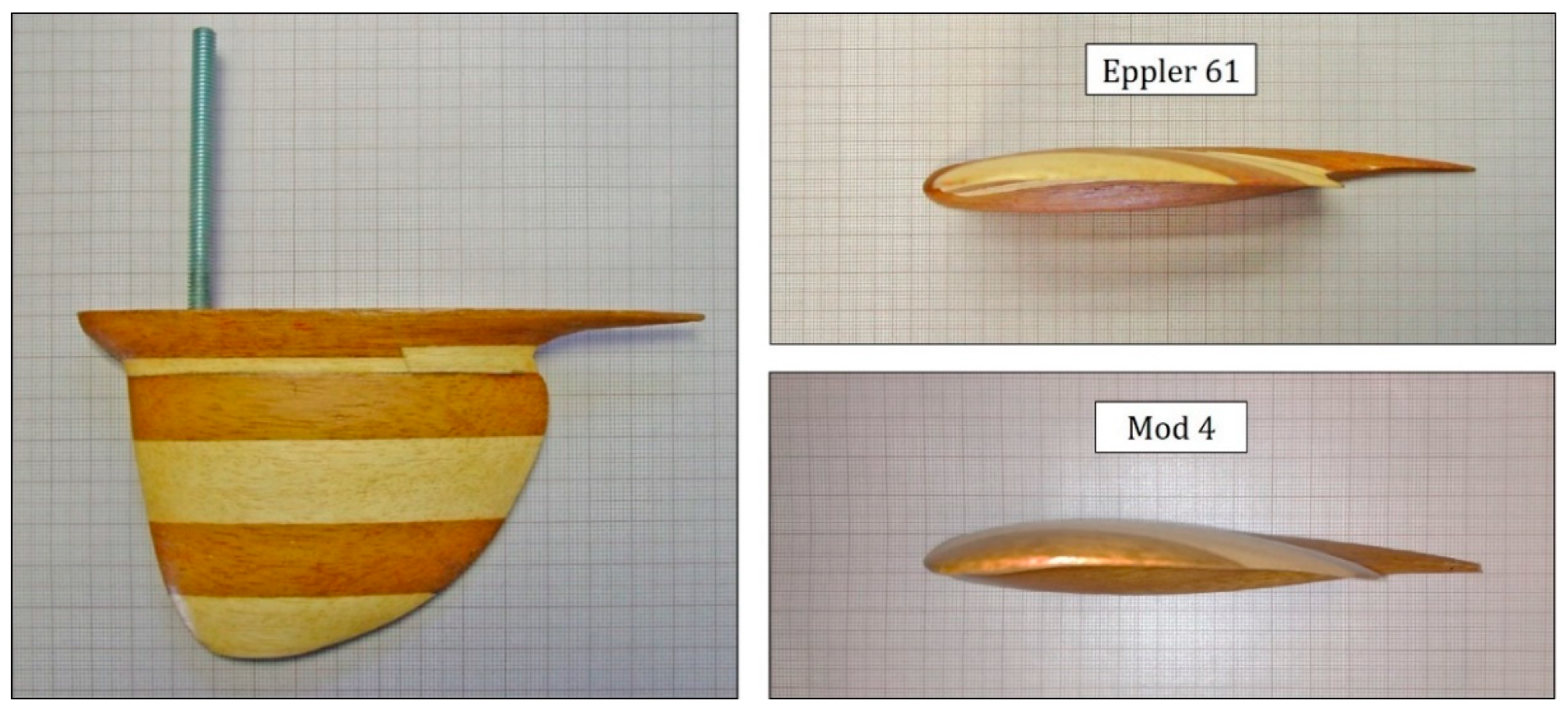
- Airfoil model: original model (Eppler 61) and modified version (Mod 4)
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Barbarino, S.; Bilgen, O.; Ajac, R.M.; Friswell, M.; Inman, D. A review of morphing aircraft. J. Intell. Mater. Syst. Struct. 2011, 22, 823–877. [Google Scholar] [CrossRef]
- Cao, W.; Cudney, H.H.; Waser, R. Smart materials and structures. Proc. Natl. Acad. Sci. USA 1999, 96, 8330–8331. [Google Scholar] [CrossRef] [PubMed]
- Bhavsar, R.; Vaidya, N.Y.; Ganguly, P.; Humphreys, A.; Robisson, A.; Tu, H.; Wicks, N.; Mckinley, G.H.; Pauchet, F. Intelligence in novel materials. Oilfield Rev. 2008, 20, 32–41. [Google Scholar]
- Colorado, J.; Barrientos, A.; Rossi, C.; Breuer, K.S. Biomechanics of smart wings in a bat robot: Morphing wings using SMA actuators. Bioinspir. Biomim. 2012, 7. [Google Scholar] [CrossRef] [PubMed]
- Prajapati, M.; Dasharathi, K.; Kumar, A.; Mahapatra, D.R. Shape memory composite cellular plan-forms for shape and area morphing. J. Micro Smart Syst. ISSS 2017, 6, 161–171. [Google Scholar]
- Kojima, T.; Ikeda, T.; Senba, A.; Tamayama, M.; Arizono, H. Wind Tunnel Test of Morphing Flap Driven by Shape Memory Alloy Wires. Trans. Jpn. Soc. Aeronaut. Space Sci. Aerosp. Technol. Jpn. 2017, 15, a75–a82. [Google Scholar] [CrossRef]
- Jodin, G.; Scheller, J.; Duhayon, E.; Rouchon, J.F.; Triantafyllou, M.; Braza, M. An Experimental Platform for Surface Embedded SMAs in Morphing Applications. Solid State Phenom. 2017, 260, 69–76. [Google Scholar] [CrossRef]
- Barbarino, S.; Pecora, R.; Lecce, L.; Ameduri, S.; Calvi, E. A novel SMA-based concept for airfoil structural morphing. J. Mater. Eng. Perform. 2009, 18, 696–705. [Google Scholar] [CrossRef]
- Bilgen, O.; Kochersberger, K.; Diggs, E.C.; Kurdila, A.J.; Inman, D.J. Morphing wing micro-air-vehicles via macro-fiber-composite actuators. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Honolulu, HI, USA, 23–26 April 2007. [Google Scholar]
- Ohanian, O., III; David, B.; Taylor, S.; Kochersberger, K.; Probst, T.; Gelhausen, P.; Climer, J. Piezoelectric morphing versus servo-actuated MAV control surfaces, part II: Flight testing. In Proceedings of the 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013. [Google Scholar]
- Ohanian, O.J., III; Karnia, E.D.; Oliena, C.C.; Gustafsonb, E.A.; Kochersbergerb, K.B.; Gelhausenc, P.A.; Brownd, C.B.L. 2011 Piezoelectric composite morphing control surfaces for unmanned aerial vehicles. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 6–10 March 2011. [Google Scholar]
- Kimaru, J.; Bouferrouk, A. Design, manufacture and test of a camber morphing wing using MFC actuated mart rib. In Proceedings of the 8th International Conference on Mechanical and Aerospace Engineering (ICMAE), Prague, Czech Republic, 22–25 July 2017; pp. 791–796. [Google Scholar]
- Kochersberger, K.B.; Ohanian, O.J., III; Probst, T.; Gelhausen, P.A. Design and flight test of the generic micro-aerial vehicle (GenMAV) utilizing piezoelectric conformal flight control actuation. J. Intell. Mater. Syst. Struct. 2017. [Google Scholar] [CrossRef]
- Keihl, M.M.; Bortolin, R.S.; Sanders, B.; Joshi, S.; Tidwell, Z. Mechanical properties of shape memory polymers for morphing aircraft applications. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 5 May 2005; pp. 143–151. [Google Scholar]
- Liu, Y.; Du, H.; Liu, L.; Leng, J. Shape memory polymers and their composites in aerospace applications: A review. Smart Mater. Struct. 2014, 23. [Google Scholar] [CrossRef]
- Liu, Y.; Lv, H.; Lan, X.; Leng, J.; Du, S. Review of electro-active shape-memory polymer composite. Compos. Sci. Technol. 2009, 69, 2064–2068. [Google Scholar] [CrossRef]
- Sun, J.; Guan, Q.; Liu, Y.; Leng, J. Morphing aircraft based on smart materials and structures: A state-of-the-art review. J. Intell. Mater. Syst. Struct. 2016, 27, 2289–2312. [Google Scholar] [CrossRef]
- Barcala-Montejano, M.A.; Rodríguez-Sevillano, A.A.; Crespo-Moreno, J.; Bardera-Mora, R.; Silva-González, A.J. Optimized performance of a morphing micro air vehicle. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 794–800. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Eppler 61 | 6.4 | 51 | 5.67 | 25.29 |
| Mod 4 | 10.0 | 45 | 5.67 | 25.29 |
| α (°) | Eppler 61 | Mod 4 | ||
|---|---|---|---|---|
| CL | CD | CL | CD | |
| 0 | 0.19 | 0.102 | 0.31 | 0.075 |
| 5 | 0.42 | 0.102 | 0.67 | 0.114 |
| 10 | 0.62 | 0.143 | 0.94 | 0.187 |
| 15 | 0.90 | 0.204 | 1.19 | 0.285 |
| 20 | 1.11 | 0.407 | 1.41 | 0.404 |
| 25 | 1.03 | 0.550 | 1.54 | 0.527 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bardera, R.; Rodríguez-Sevillano, Á.; García-Magariño, A. Aerodynamic Investigation of a Morphing Wing for Micro Air Vehicle by Means of PIV. Fluids 2020, 5, 191. https://doi.org/10.3390/fluids5040191
Bardera R, Rodríguez-Sevillano Á, García-Magariño A. Aerodynamic Investigation of a Morphing Wing for Micro Air Vehicle by Means of PIV. Fluids. 2020; 5(4):191. https://doi.org/10.3390/fluids5040191
Chicago/Turabian StyleBardera, Rafael, Ángel Rodríguez-Sevillano, and Adelaida García-Magariño. 2020. "Aerodynamic Investigation of a Morphing Wing for Micro Air Vehicle by Means of PIV" Fluids 5, no. 4: 191. https://doi.org/10.3390/fluids5040191
APA StyleBardera, R., Rodríguez-Sevillano, Á., & García-Magariño, A. (2020). Aerodynamic Investigation of a Morphing Wing for Micro Air Vehicle by Means of PIV. Fluids, 5(4), 191. https://doi.org/10.3390/fluids5040191