3.1. Single Cylinder
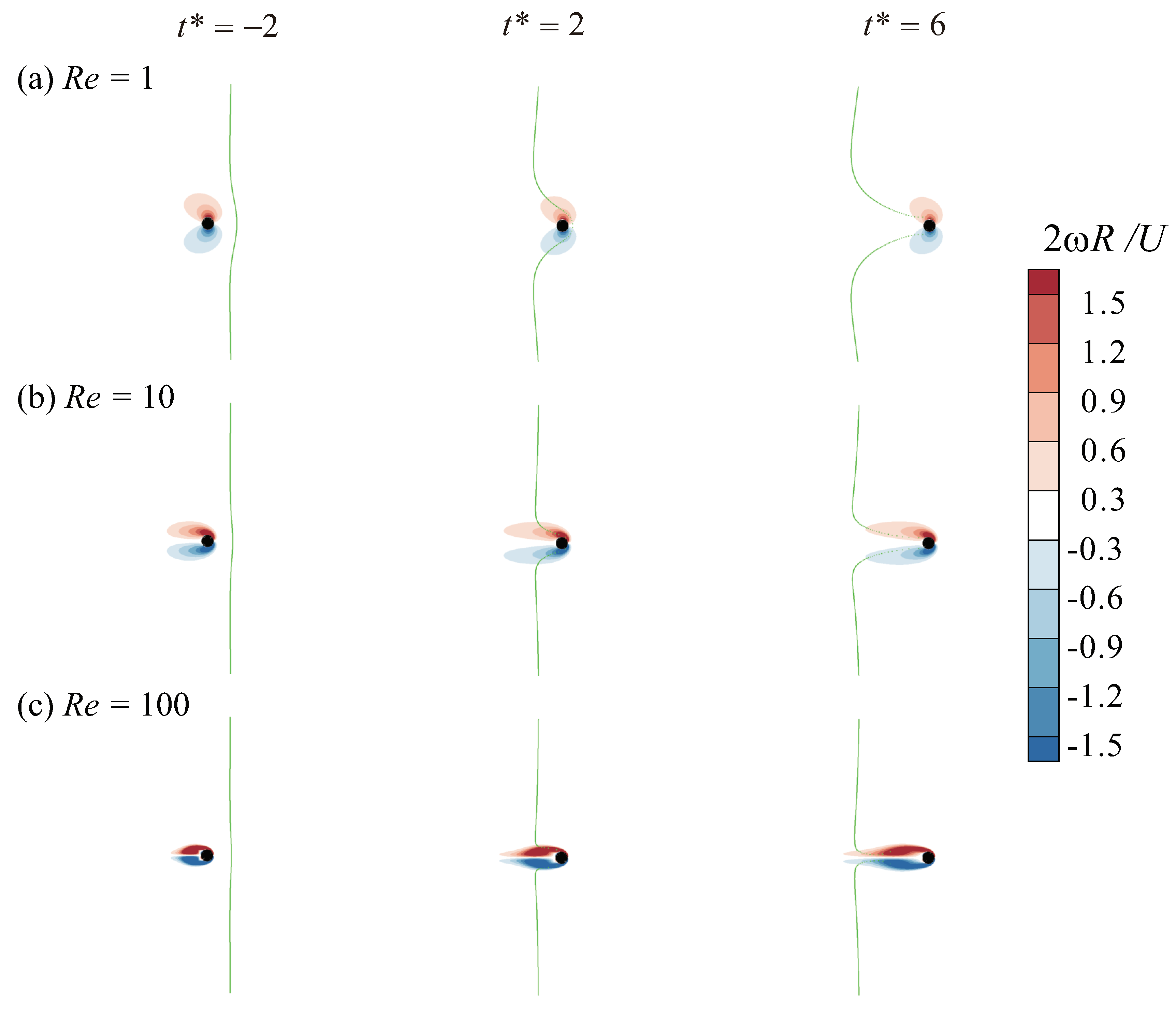
We first examine the effect of Reynolds number on fluid drift for a single cylinder. Although single-cylinder cases are not directly relevant to fluid transport by hairy structures, they are essential in understanding how changes in viscosity influence the behavior of fluid particles. Vorticity fields and particle trajectories are compared for different Reynolds numbers between 1 and 100 in
Figure 2. At
, vorticity is more widely diffused along the
y direction compared with
and
. Because of strong viscous diffusion, fluid particles gain more velocity in the region far from the cylinder. As a result,
x directional drift occurs for a wider range of the initial material line, and the deformed material line forms an arc-like shape since drift is largest near the cylinder and decreases monotonically in the positive and negative
y directions. As the Reynolds number becomes larger, fluid particles near the cylinder are not dragged so much, and, at
, the region of drift is almost confined to the diameter of the cylinder.
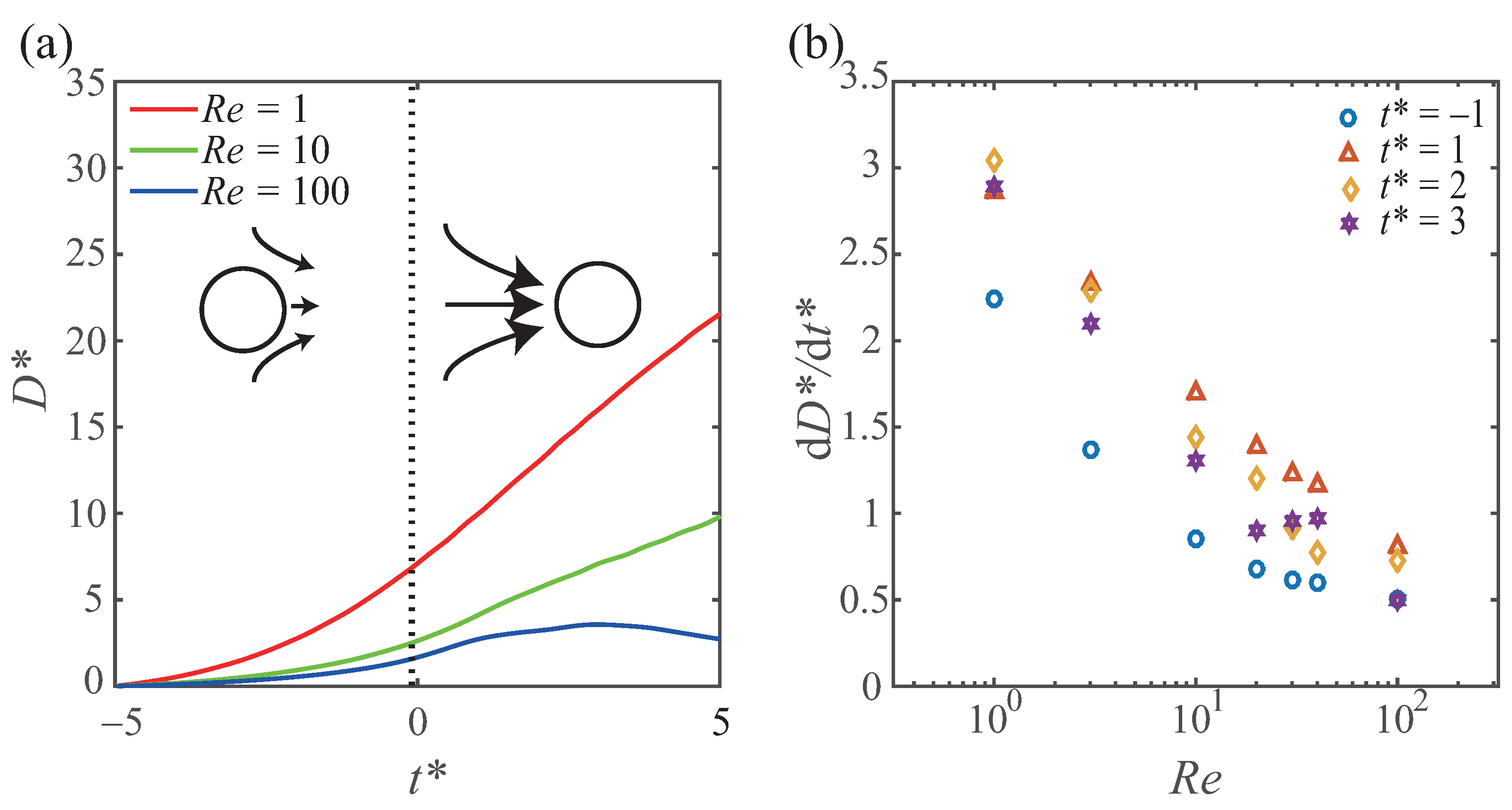
The continuous distortion of the material line leads to temporal variation of the drift volume
(
Figure 3a). For
and
because of the disturbed flow in front of the cylinder, noticeable drift occurs even before the cylinder front touches the initial material line. This is clearly illustrated at
in
Figure 2a. However, drift is more effective when fluid particles are dragged behind the cylinder after
, since they are then placed in the region of higher disturbed flow velocity. The slope of
gradually increases before
and maintains a nearly constant slope after
instead of converging to a specific value at
(
Figure 3a). Although not presented here, we have confirmed that, at
and
, the slope of
gradually decreases, but
does not converge until
. This is attributed to fluid particles very close to the cylinder, whose velocities remain comparable to the velocity of the cylinder:
. Although
is not small enough to expect Stokes-flow behavior, at
, viscous effects are so strong that the drift volume keeps increasing. On the other hand, at
, vorticity is confined to a small
y range where the particles are influenced by the rotational motion caused by vortex shedding by the cylinder and tend to head toward the horizontal centerline (
Figure 2c). Thus, as time advances, the width of the material line becomes narrower, which leads to a reduction in
after the cylinder has proceeded a sufficient distance (
).
According to
Figure 3a, drift volume is inversely related to Reynolds number at a given time, which can also be seen from
Figure 2. For example, at
,
for
, which is 2.2 and 7.9 times the values for
and
, respectively. Furthermore,
Figure 3b shows how viscous effects change the rate of change of drift volume
for
. The common trend is that, after
,
tends to decrease almost linearly with a logarithmic change in
. This linear relation is more obvious at
; however, for
, deviation is observed, especially at higher Reynolds number.
3.2. Double Cylinders
When two close solid bodies translate side-by-side at low Reynolds number, owing to strong viscous diffusion of vortices (shear layers) generated by the bodies, two counter-rotating vortices in the gap between the bodies will overlap and cancel each other, and the gap will be hydrodynamically blocked by viscous diffusion; i.e., fluids around the bodies rarely penetrate into the gap and behave as if the gap were blocked [
12,
17]. Such a hydrodynamic barrier is also identified in our double-cylinder model. In
Figure 4, the vorticity fields are obtained for
–100 at three different time steps. At
, counter-rotating vortices inside a gap are annihilated by viscous diffusion and are hardly observed during the time span considered in our study (
Figure 4a). Only two vortices outside the cylinders are observed. Because of the hydrodynamic barrier, the material line of fluid particles deforms into an arc shape without any penetration though the gap. The effect of the fluid barrier weakens as the Reynolds number grows. For
, fluid particles in front of the cylinders initially drift together, but penetration eventually occurs at around
(
Figure 4b). At higher Reynolds number (say,
), two counter-rotating vortices are clearly observed inside the gap, and downstream convection of vorticity is prevalent rather than its diffusion. Noticeable penetration of fluid particles results in complicated distortion of the material line (
Figure 4c).
In
Figure 5, the material lines of entrained fluid particles of moving double cylinders (
) for four different gap widths
G are illustrated after the double cylinders have passed through the initial material line (
). Although the gap-blockage effect is predominant at low Reynolds number (
), the deformation of the material line and the magnitude of the drift volume are clearly affected by the gap distance
G between the two cylinders (
Figure 5). At
, the material line maintains a convex shape near the cylinders as if it were being drifted by a single connected body. However, with increasing
G, penetration of fluid particles begins to occur earlier and the penetration depth becomes greater. Instead of being convex, the material line displays two peaks around the positions of the two cylinders. At a given time, the drift volume increases monotonically with
G, but eventually converges, as can be confirmed from the curves of
–
in
Figure 5e; as
G approaches infinity, which represents the case of two independent cylinders,
will converge asymptotically to twice the drift volume of a single cylinder.
Further work has been conducted on the penetration of the material line. Here, the penetration time
is defined as the time at which a centerline particle of the material line reaches the same
x coordinate as that of the center of the moving cylinders; without any drift,
. From
Figure 5f, we can confirm that
is approximately inversely proportional to
:
. For example,
for
increases sevenfold from the value
for
. The velocity of fluid particles in the gap decays as the double cylinders continue to proceed, and even for small
G, penetration eventually occurs, no matter how long this takes.
When the material line (red) of double cylinders is compared with the two superimposed material lines (blue) of a single cylinder for the four cases in
Figure 5a–d, two common trends are found. First, regardless of the strong blockage effect at small
G or the penetration at large
G, the existence of a nearby cylinder induces drift of fluid particles near the centerline (
), which results in a gain in the drift volume near the centerline. Second, the material line of the double cylinders is dragged less near
and
compared with the single-cylinder case, and even undergoes stronger reflux (negative Lagrangian displacement in the
x direction) over a wider range, which ends up leading to a loss in drift volume.
For double cylinders, the areas for gain, loss, and overlap in drift volume, relative to the single-cylinder case, are denoted by blue (
), yellow (
), and red (
), respectively, in
Figure 6a. Here, we will quantify the variation of gain and loss volumes by the gap width
G. At low Reynolds number (
), the material line is symmetric with respect to the centerline, and only the upper half will be evaluated. Instead of the drift volume
normalized by a single-cylinder area (
), another dimensionless drift volume
is used, which is normalized by the total area of two cylinders (
).
is equivalent to the drift volume of the red material line above the centerline in
Figure 6a. Then,
for double cylinders can be expressed as
In
Figure 6a and Equation (
3),
is the drift volume for the single-cylinder case, and
is the area subtracted owing to the overlap of two drift volumes for the single-cylinder case. For any gap width
G,
is smaller than
. For example, at
, corresponding to
Figure 5,
is 31.1 while
is between 24.7 and 29.4 for
–
. In
Figure 6b,
is greater than
for all gap widths considered in this study:
. Nevertheless,
is large enough to offset the net gain (
), and, as a consequence,
is smaller than
.
The monotonic decrease of
with increasing
G in
Figure 6b follows straightforwardly from geometrical considerations; with further separation of the two cylinders,
will fall to zero. Meanwhile, the variations of
and
with
G are quite intriguing in that they rely on the viscous effects of particle drift. As
G increases until
, the downstream region of the gap expands, contributing to
. However, penetration of the material line proceeds simultaneously and is conspicuous at larger
G. For this reason, the rate of increase of
gradually reduces with
G; the rate is found to be 1.4 from
to
, but only 0.1 from
to
(
Figure 6b).
As fluid particles near the centerline drift along the moving cylinders and generate
, reflux should occur at the outer sides of the cylinders in order to satisfy mass conservation (
Figure 5a–d). In addition, the vortex at the outer side shown in
Figure 4a induces fluid particles behind the cylinders to move toward the centerline, which sequentially causes the material line to recede. Note that the vortex inside the gap is annihilated and cannot counteract the motion of the fluid particles moving toward the centerline. The reflux and the vortex-induced motion of the fluid particles result in recession of the material line and formation of
. In other words,
is accompanied by
, and they actually show a similar trend in terms of the change in
G. Although both
and
continue to increase in the range of
G tested in this study, they will start to decrease at a certain
G and will become zero when the gap-blockage effect disappears and the material line is deformed independently by each cylinder.
3.3. An Array of Cylinders
For a configuration more relevant to biological hairy structures, the collective behavior of an array of cylinders is investigated with respect to material line dynamics and drift volume. In
Figure 4, the cases
and
exhibit similar wake patterns: two counter-rotating outer vortices are steadily attached to the cylinders, and two inner vortices are canceled out. If the gap width between the cylinders is small enough (e.g.,
), this wake pattern is reproduced in an array of cylinders, no matter how many cylinders there are: only two counter-rotating outer vortices are steadily sustained, with all inner vortices being smeared out. In this subsection, since similar patterns of flow structure and material line deformation are expected between
and
,
is fixed as 1.
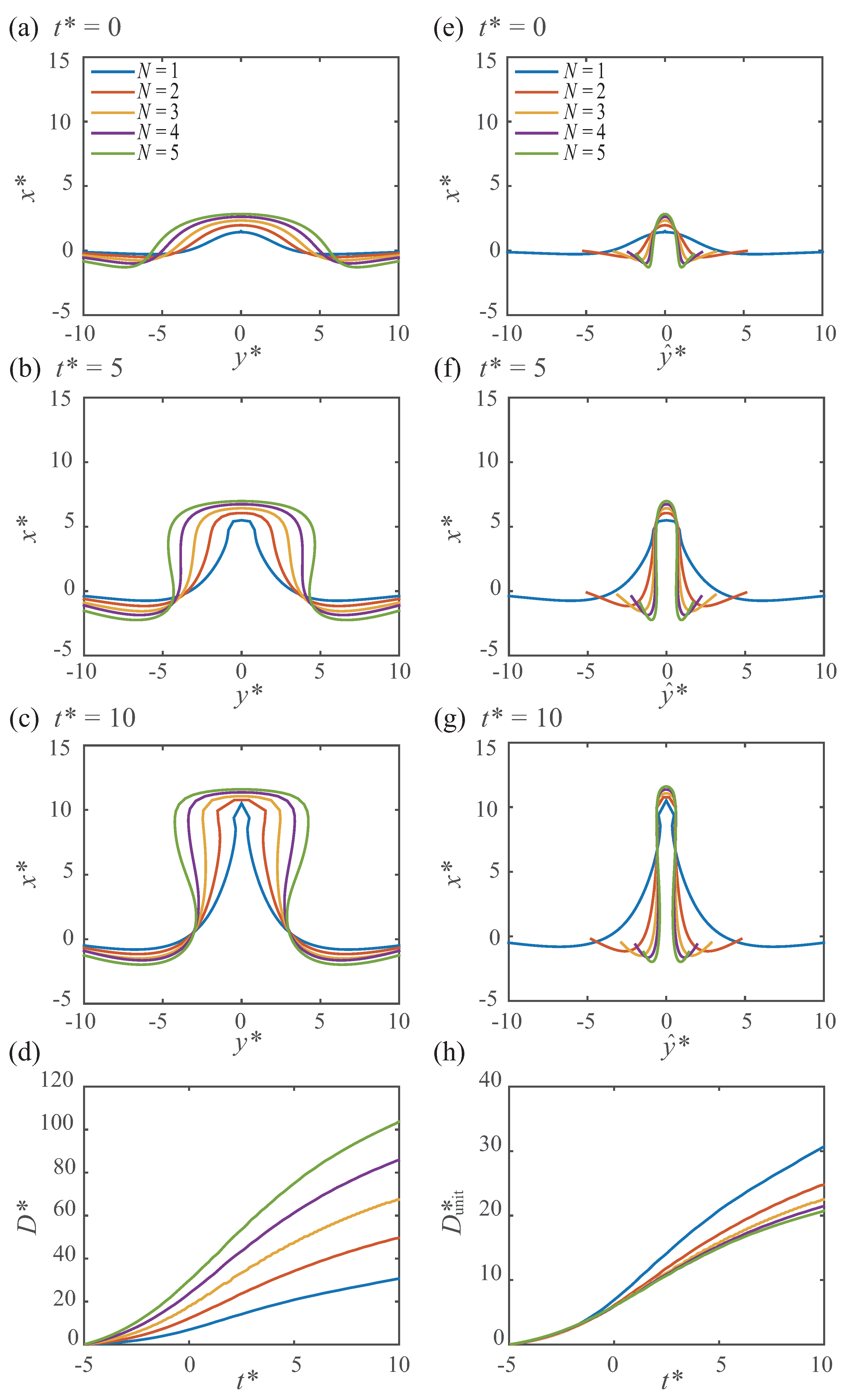
For all cases with different numbers of cylinders considered in this study (
–5), the shape of the material line shows a noticeable change with increasing
N. In
Figure 7a–d, the behavior of the material lines for different arrays of cylinders is depicted, and the corresponding drift volumes
are computed in time series from
to
. The front of the line becomes flatter and drifts slightly faster for larger
N. It also becomes wider in the
y direction (
Figure 7a–c). As a result,
increases with
N as expected (
Figure 7d). As cylinders are added one by one, the increment in
is almost constant in all phases of the translation; i.e., the gap between two adjacent curves in
Figure 7d is almost constant at a given time. With increasing
N, reflux also increases in accordance with
. Refer to
Section 3.2 for the relation between drift volume and reflux. Interestingly, for large
N (e.g.,
), the material line near
continues to narrow as time advances (
Figure 7a,c). Eventually, the width of the material line near
becomes almost identical for
in the range 5–10.
For an array of cylinders, a hydrodynamic barrier is formed inside all the gaps, and the cylinder array can be regarded as a flat plate. The length
L from one end of the array to the other is then the dominant factor affecting the overall geometry of the material line. To exclude the effect of length
L in the comparison of material lines, the
y coordinate is scaled with
L rather than with
:
As
N increases, material lines scaled by
L in the
y direction tend to approach a single material line (say, the line for
in our study) (
Figure 7e–g). The collapse of the scaled material lines is clearer in the region close to the cylinder array. Meanwhile, it is noteworthy that the
y-directional shrinkage of the scaled material lines with increasing
N is observed near
far behind the array, which is accompanied by significant reflux as mentioned above.
Asymptotic convergence with increasing
N also emerges in the drift volume scaled with
N (
Figure 7h). In
Figure 7h, the drift volume is scaled with the total area of the cylinders rather than with the area of a single cylinder:
whereas
increases with
N,
decreases with
N and converges to the case of large
N (say,
). At
,
decreases by 19.3% from
to
, but by only 3.4% from
to
.
A noticeable trend in
Figure 7a–c is that, for large
N, the material line near
becomes narrower as time goes on, although the material line near the cylinder array remains wide, and this eventually results in the formation of a neck near
. The width of the material line at
decreases about 60% from
to
for
. The formation of the neck is attributed to counter-rotating outer vortices at both sides of the array.
The velocity fields for each array of cylinders are depicted in
Figure 8. Here,
u and
v components are compared for
array at
in
Figure 8a, and
v components for arrays with different numbers of cylinders are shown at
(
Figure 8b–d). Because of the hydrodynamic barrier, the cylinder array produces a homogeneous region of positive
u velocity and drags fluids behind the array (
Figure 8a). The
u velocity is strongest just behind the array and decreases gradually downstream. Large drift in the
x direction is accompanied by the formation of strong outer vortices. The outer vortices induce a velocity field with a significant
v-velocity component, which results in fluid particles heading toward the centerline
(
Figure 8a). In
Figure 8a, near
, the maximum
is about 0.26, which is comparable to the maximum
(= 0.26). In
Figure 8b–d, on the material line in the wake, the
v velocity is not uniform: its magnitude increases gradually from the cylinder array to
(in the negative
x direction). This nonuniform distribution causes formation of a neck near
. The
v velocity near
is stronger for larger
N, producing a more noticeable neck.
We have demonstrated that the addition of a cylinder increases the drift volume
at any time before and after
(
Figure 7d). However, this result does not mean that adding a cylinder always contributes to
. In
Figure 7, the gap width is fixed as
to ensure a strong blockage effect, and the length
L from one end to the other (Equation (
4)) is varied. On the other hand, let us consider fixed
L for the two outermost cylinders and place additional cylinders between these two, thereby increasing
N. In this scenario, with increasing
N, the overall blockage effect will continue to become stronger, either by direct obstruction of flow due to the added cylinders or by enhancement of the fluid barrier due to the narrower gap width
G. For finite
L, the space between two adjacent cylinders will eventually become blocked with further increase in
N. Thus, as
N increases, the effect of the blocking behavior on drift volume will become negligible.
To find the relation between drift volume and number of cylinders for fixed length
L, we first position two cylinders with
and then examine the changes in the material line and drift volume when additional cylinders are placed between them such that the cylinders are equally spaced and
G between two adjacent cylinders is varied:
(
),
(
),
(
), and
(
) (
Figure 9a,b). In contrast to
Figure 7, which exhibits similarity of material lines when they are scaled with
, variation of
G allows different behaviors of the penetrability through the gap, which breaks the geometric similarity near the cylinder array. In
Figure 9a,b, fluid penetration through the gap occurs for
and
, while complete blockage of the gap is observed for
and
. The time history of
in
Figure 9c also shows an irregular pattern. Because of the formation of irregular material lines for the four cases, in contrast to
Figure 7d, which exhibits a linear increase in
with increasing
N, the increase in
is not regular. That is, the spacing between the curves for
–5 is not uniform (
Figure 9c).
Interestingly, the front of the material line for
proceeds slightly faster than that for
(
Figure 9a,b). In the meantime, the neck near
recedes faster toward the centerline. The trend at the front is opposite to the trend observed in
Figure 7; compare the material lines for
and
between
Figure 7 and
Figure 9. Because of the more rapid advancement of the front, the drift volume for
can be even larger than that for
from
to
(
Figure 9c).
In addition to
,
also exhibits irregular behavior without uniform convergence with increasing
N, in contrast to
Figure 7h (
Figure 9d). Noticeably, while
for
is always smaller than that for
in
Figure 7h,
for
is always larger than that for
. This trend is mainly because the material line for
exhibits much smaller penetration at the gaps, leading to larger
as well as
. Furthermore,
for
exceeds the other cases for a finite time span (
), owing to the more rapid advance of the front material line as mentioned above.
In this study, we have adopted drift volume to evaluate the efficiency of fluid transport, and admittedly we could have considered another parameter suitable for a given problem. Nevertheless, the results in
Figure 9c,d indicate that, for a given condition (say, fixed
L in our study), there may be an optimal number (and configuration) of solid bodies to effectively transport fluid volume around them, and this optimal number will depend on how we define the effectiveness: for example,
or
in our study.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








