1. Introduction
In recent years, considerable attention has been given to understanding the behavior of particles suspended within liquids because of their importance in a wide range of applications, e.g., self-assembly of micron to nano-structured materials, separation and trapping of biological particles [
1], stabilization of emulsions, and the formation of fluids with adjustable rheological properties, etc. [
2,
3,
4,
5,
6,
7,
8,
9,
10,
11]. Future progress in these and related areas will critically depend upon our ability to accurately control the arrangement of particles for a range of particle types and sizes, including those of uncharged particles.
When a dielectric particle is subjected to a spatially non-uniform electric field it experiences an electrostatic force, called the dielectrophoretic (DEP) force. The DEP force arises because the particle becomes polarized and the polarized particle (or dipole) placed in a spatially varying electric field experiences a net force. This phenomenon itself is referred to as dielectrophoresis [
2]. The force can be in the direction of the gradient of electric field or in the opposite direction. For a positively polarized particle the force is in the direction of the electric field gradient and for a negatively polarized particle the force is in the opposite direction to the gradient. In addition, the particle interacts electrostatically with other particles which can be modeled as dipole-dipole interactions. The dipole-dipole interactions are present even in a uniform electric field.
Dielectrophoresis is an important technique because it can be used to manipulate uncharged particles. Also, since the DEP force depends on the dielectric properties of the particle, the force is different on different kinds of particles. Therefore, in principle, DEP force can be used to separate particles with different dielectric properties [
3]. For example, cancer cells can be separated from normal cells as they have different dielectric properties [
12,
13,
14,
15].
Here we present a direct numerical simulation (DNS) method based on the finite element method which can be used to study the motion of dielectric particles suspended in a dielectric liquid. The electric field can be uniform or nonuniform, e.g., the field in a dielectrophoretic cage is nonuniform. Direct numerical simulations are important for understanding the dependence of the DEP force-induced motion on the fluid and particle properties, and also for designing efficient microfluidic devices.
The point dipole (PD) approximation [
2,
14] which has been used in many past studies assumes that the particle is small compared to the length scale over which the electric field varies, and that the distance between the particles is much larger than the particle diameter. In this approximation, the electric force acting on a particle consists of two components, one due to dielectrophoresis, and the other due to the particle-particle interactions. The accuracy of the PD approximation decreases when the electric field varies significantly over a length scale comparable to the particle size and also when the distance between the particles is small.
The accuracy of the PD approximation can be improved by including higher order multipole moment terms in the force [
16]. However, as shown in Reference [
17], even when the multipole terms are included, it lacks the completeness of the Maxwell Stress Tensor (MST) method. In the latter method, the force is computed from the electric field that accounts for the presence of all particles in the computational domain and so the computed force incorporates multibody interactions [
17]. The MST method is computationally demanding because the electric field has to be computed at each time step as the field changes when the particles move [
18,
19,
20]. In Reference [
21], an energy based method, which accounts for the presence of particles, was used to compute the force on the particles in a uniform electrical field. In this method, both far and near field interactions are included in the particle-particle force.
During the past 10 years, several new DNS approaches have been developed to model dielectrophoresis [
22,
23,
24,
25,
26,
27,
28,
29]. A scheme to study ac dielectrophoresis is described in Reference [
30]. In this scheme, the ac electric field is obtained by solving the quasi-electrostatic form of the Maxwell equation from which the DEP force acting on the particles is obtained and the motion of particles in the fluid is simulated using the immersed boundary method. The scheme was used to study the motion of levitated particles and to evaluate the accuracy of the point dipole method. It was noted that in a given domain the accuracy of the PD method decreases with increasing particle size and that the accuracy diminishes in a high electric field gradient region. A numerical approach to study chain formation by particles with dissimilar electrical conductivities, sizes and shapes is described in [
24]. An arbitrary Lagrangian-Eulerian (ALE)-based method was used in Reference [
25,
26] to study ac and dc dielectrophoresis in two-dimensions. The focus of this work was on understanding the mechanisms involved in particle assembly. A scheme based on the boundary-element method (BEM) was developed in Reference [
27] to solve the coupled electric field, fluid flow and particle motion problems in the Stokes flow limit. A PD-based method in which the induced dipole moments within the particles are computed by accounting for the nearby particles, was developed in Reference [
28]. There are several other studies in which only the DEP force lines in the devices were considered and the particle trajectories were estimated without considering the fluid-particle interactions [
30,
31].
Recently, in Reference [
28], a multiphase model-based approach has been developed to study the motion of a large number of particles. The dielectrophoretic force in this approach is calculated using the point dipole approach, and the drag acting on the particles is modelled by Stokes law. The fluid flow induced due the motion of particles is not considered in this model. These model-based simulations allow us to study systems with thousands of particles which, at present, is not possible when a DNS approach is employed. However, a model-based approach may not accurately capture the underlying physics, and so the DNS or experimental results are needed to validate it.
In our DNS method, the exact equations governing the motion of the fluid and the particles are solved and subjected to the appropriate boundary conditions. The scheme uses a distributed Lagrange multiplier (DLM) method to enforce the rigid body motion constraint in the region occupied by the particles [
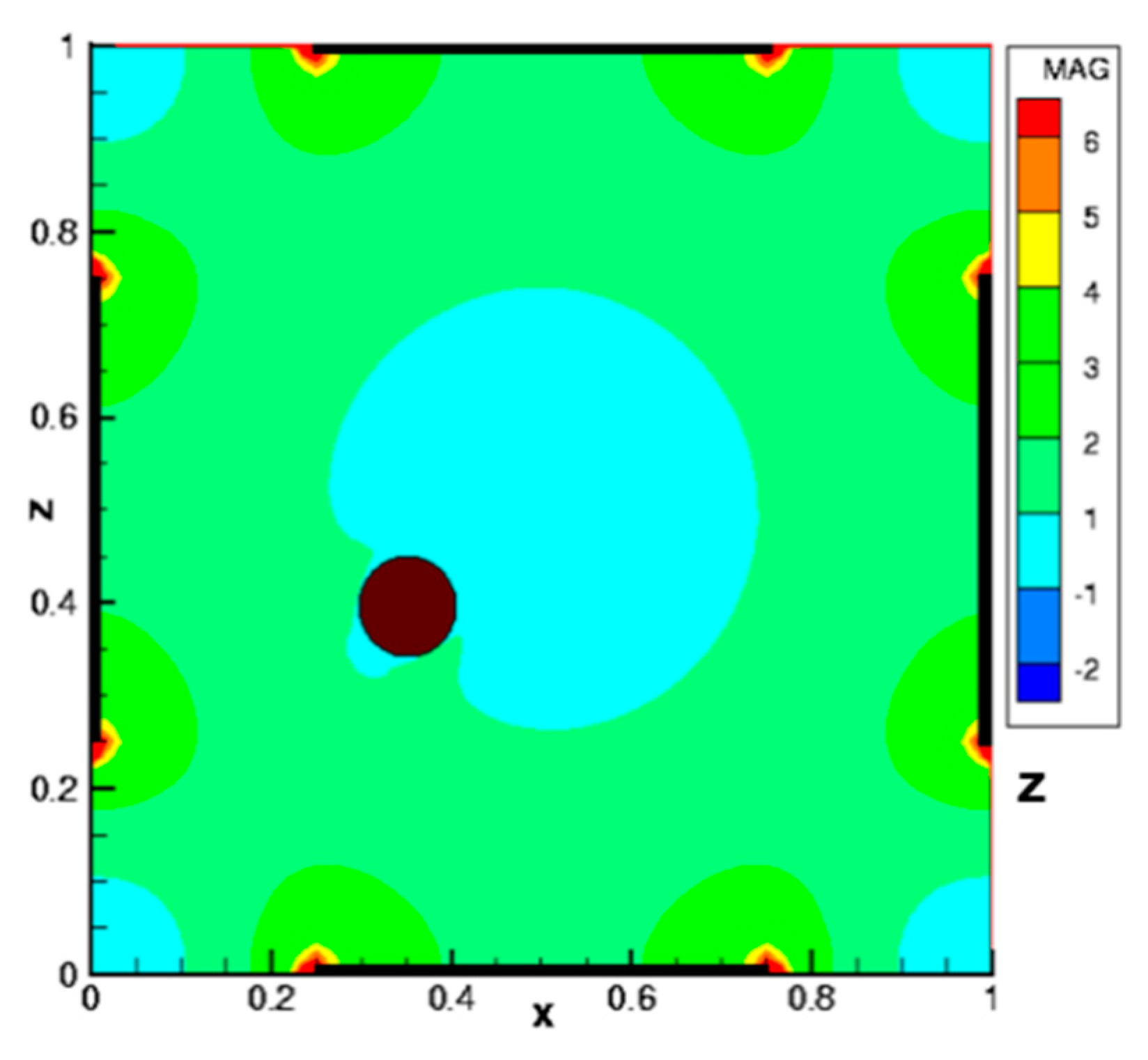
32] and the electric force acting on the particles is computed using the point-dipole and Maxwell stress tensor approaches. One of the focuses of this paper is on the case where the particle size is comparable to the length scale over which the electric field varies. It is shown that the tendency of particles to form chains diminishes with increasing particle size, as the DEP force increases faster than the particle-particle interaction force. Thus, although particles come together to form chains when they are away from the electrodes, they may not collect at the same electrode as the neighboring electrode pulls some particles away from the first electrode. This happens because the presence of particles modifies the electric field, which changes the magnitude and direction of the DEP force.
2. Methods
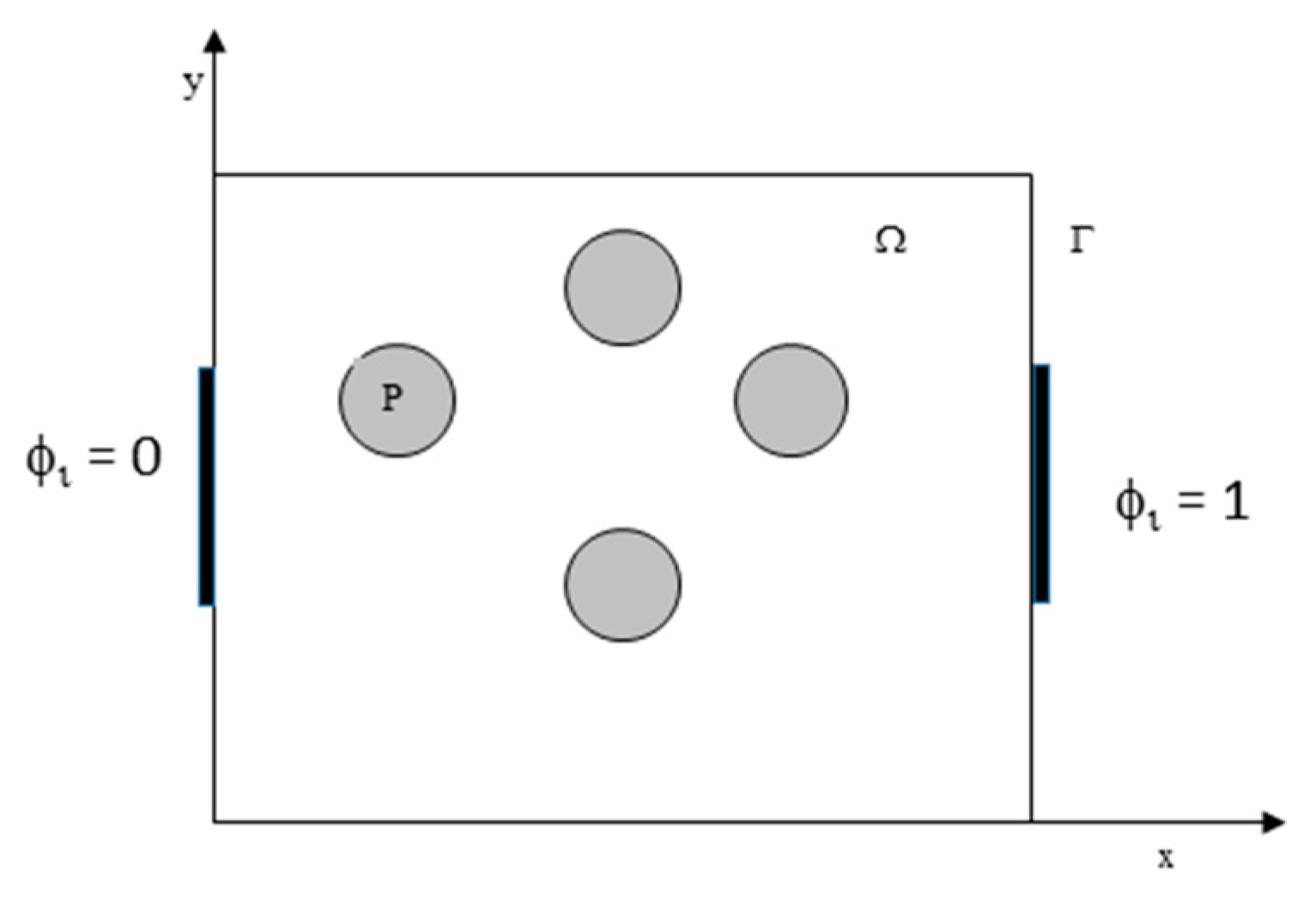
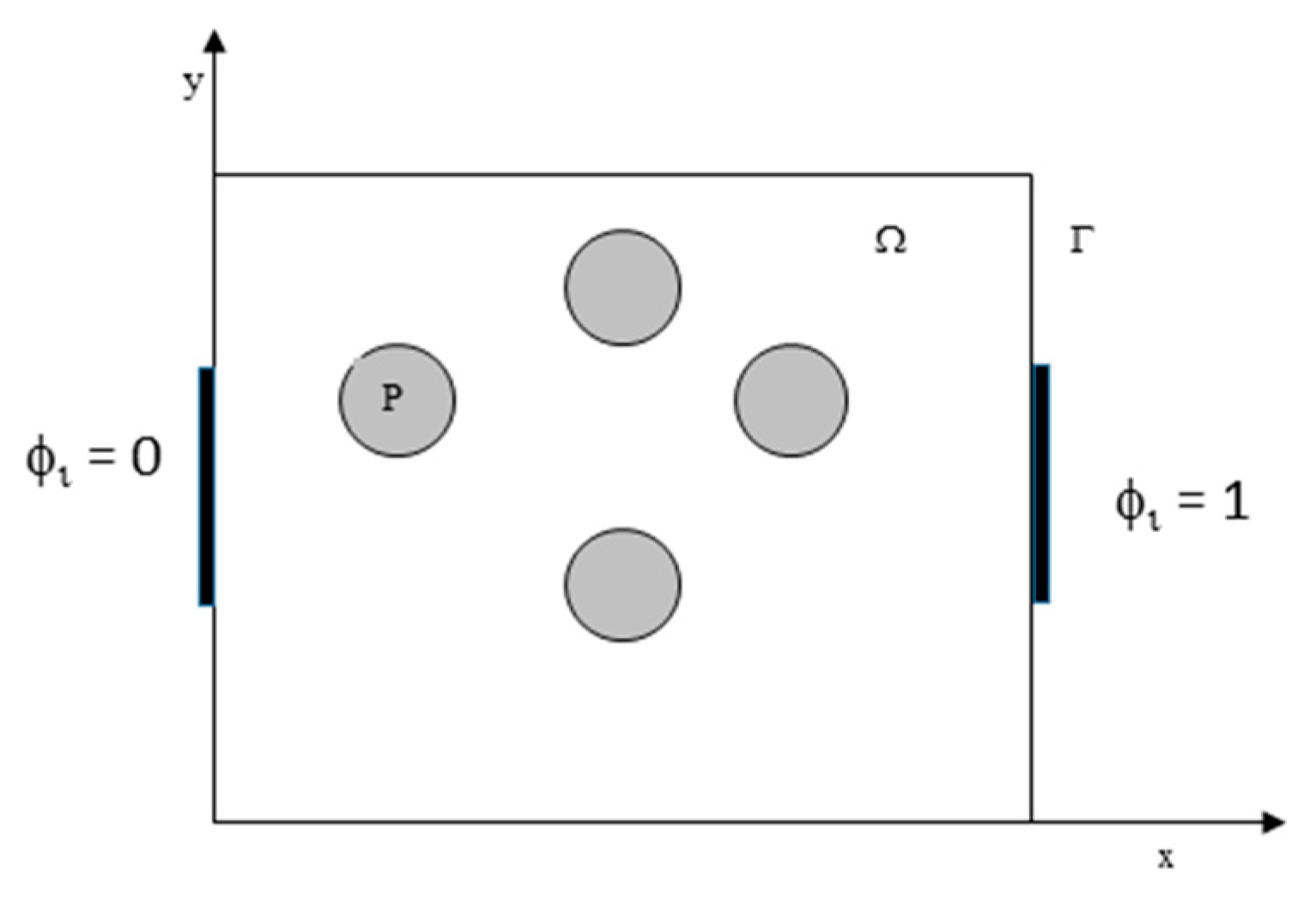
The motion of particles suspended in fluids under the action of electric forces is governed by highly nonlinear coupled partial differential equations. We must solve the Navier-Stokes equation for the fluids which are coupled with the equation of motion for the particles and satisfy the boundary conditions. In addition, we must determine the electric field and calculate the electric force by integrating the Maxwell stress tensor over the surface of particles. The flow field and the electric field must be resolved at a scale smaller than the size of particles as well as in the gap between the particles. Let us assume that there are
N solid particles in the domain denoted by
and denote the interior of the
i th particle by
Pi(t), and the domain boundary by
Г (see
Figure 1). The momentum and mass conservation equations are
where
u is the fluid velocity,
p is the pressure,
η is the dynamic viscosity of the fluid,
is the fluid density,
D is the symmetric part of the velocity gradient tensor. The boundary conditions on the domain and the particle boundaries are:
where
Ui and
ωi are the linear and angular velocities of the
i th particle, respectively, and
ГPi = is the boundary of the
i th particle.
The above equations are solved using the initial condition , where is the known initial value of the velocity.
The linear velocity
Ui and the angular velocity
of the
i th particle are governed by
where
mi and
Ii are the mass and moment of inertia of the
i th particle, respectively.
Fi and
Ti are the hydrodynamic force and torque acting on the
i th particle, respectively,
FE,i is the electrostatic force acting on the
i th particle and
TE,i is the electrostatic torque acting on the
i th particle. In this paper, our focus is on the case of spherical particles, and so we do not need to keep track of the particle orientation. The particle velocities are then used to update the particle positions
where
Xi,0 is the position of the
i th particle at time
t = 0.
2.1. Formulation of Algorithms
2.1.1. Point-Dipole and Maxwell Stress Tensor Approaches
In the PD approximation, the electric force acting on a particle is obtained by computing the net particle-particle interaction force and adding it to the dielectrophoretic force. The time averaged dielectrophoretic force in an AC electric field is [
2,
14]
where
a is the particle radius,
εc is the dielectric constant of the fluid,
ε0 = 8.8542 × 10
−12 F/m is the permittivity of free space and
E is the RMS (root mean square) value of the electric field. Equation (9) is also valid for a DC electric field, in which case
E is simply the electric field intensity. The coefficient
is the real part of the frequency-dependent Clausius-Mossotti factor, given by
where
and
are the frequency dependent complex permittivities of the particle and fluid, respectively. Here
is the complex permittivity, where
and
are the permittivity and conductivity, and
. Notice that the value of Clausius-Mossotti factor is between −0.5 and 1.0.
In a non-uniform electric field, the particle-particle interaction force on the
i th particle due to the
j th particle is obtained by accounting for the spatial variation of the electric field [
33,
34,
35,
36]
Here rij is the unit vector from the center of i th particle to j th particle and r = |rij|.
We first obtain the electric potential by accounting for the presence of particle:
The boundary conditions on the particle surface are given by
where
and
are the electric potential in the liquid and particles, respectively. The electric field is then calculated using the expression
Then the Maxwell stress tensor is computed
The electrostatic force and torque on the
i th particle are given by
where
ni is the unit outer normal on the surface of the
i th particles and
xi is the center of the
i th particle.
2.1.2. Dimensionless Equations and Parameters
Equations (1), (2) and (4) are nondimensionalized by assuming that the characteristic length, velocity, time, stress, angular velocity and electric field scales are
a,
U*,
a/U*,
ηU*/a,
U*/a and
E0, respectively. The gradient of the electric field is assumed to scale as
E0/
L, where
L is the distance between the electrodes, which is taken to be the same as the domain width. The nondimensional equations for the liquid, after using the same symbols for the dimensionless variables, are:
where
is the dimensionless extra stress. If the PD approximation is used for evaluating the electrostatic force, the dimensionless equations for the particles become
In terms of the Maxwell stress tensor, they are:
If the PD approximation is used, the above equations contain the following dimensionless parameters:
Here Re is the Reynolds number, which determines the relative importance of the fluid inertia and viscous forces, P1 is the ratio of the viscous and inertia forces, P2 is the ratio of the electrostatic particle-particle interaction and inertia forces, and P3 is the ratio of the dielectrophoretic and inertia forces. Another important parameter, which does not appear directly in the above equations, is the solids fraction of the particles; the rheological properties of ER (electrorheological) suspensions depend strongly on the solids fraction.
If the Maxwell stress tensor approach is used, an alternative parameter which is a measure of the electrostatic forces is obtained in place of P2 and P3. This parameter is less informative than parameters P2 and P3, as it does not separately quantify the particle-particle and dielectrophoretic contributions. In flows for which the applied pressure gradient or the imposed flow velocity is zero, a characteristic velocity can be obtained by assuming that the dielectrophoretic force and the viscous drag terms balance each other. For our simulation results, is the maximum particle velocity.
In order to investigate the relative importance of the electrostatic particle-particle and dielectrophoretic forces, another parameter is defined:
Equation (25) implies that if β = O(1) and L >> a, and so P4 > 1, the particle-particle interaction forces will dominate, which is the case in most applications of dielectrophoresis. On the other hand, if β << O(1) and O(1), and thus P4 < 1, then the dielectrophoretic force dominates. The latter is the case for the larger sized particles considered in our simulations.
2.2. Finite Element Method
The computational scheme uses a distributed Lagrange multiplier method (DLM) for simulating the motion of rigid particles suspended in a Newtonian fluid [
26,
27]. In our implementation of the scheme, the fluid-particle system is treated implicitly using a combined weak formulation in which the forces and moments between the particles and fluid cancel. The flow inside the particles is forced to be a rigid body motion by a distribution of Lagrange multipliers. The time integration is performed using the Marchuk-Yanenko operator-splitting technique which is first-order accurate [
19,
21,
26]. The domain is discretized using a tetrahedral mesh where the velocity and pressures fields are discretized using
P2-
P1 interpolations and the electric potential is discretized using
P2 interpolation. The scheme allows us to decouple its four primary difficulties:
The incompressibility condition, and the related unknown pressure, This gives rise to a Stokes-like problem for the velocity and pressure distributions, which is solved by using a conjugate gradient method [
32,
37].
The nonlinear advection term. This gives rise to a nonlinear problem for the velocity which is solved by using a least square conjugate gradient algorithm [
32,
37].
The constraint of rigid-body motion in
Ph(
t), and the related distributed Lagrange multiplier. This step is used to obtain the distributed Lagrange multiplier that enforces rigid body motion inside the particles. This problem is solved by using a conjugate gradient method described in Reference [
32,
37]. In our implementation of the method we have used an H
1 inner product (see (35)) for obtaining the distributions over the particles, as the discretized velocity is in H
1.
The equation for the electric potential. It is solved independently as it is not directly coupled with the momentum and mass conservation equations. Then the electric force is obtained using the Maxwell stress tensor approach [
18,
20].
2.3. Simulation Domains and Parameters
To test our finite element code, we conducted direct numerical simulations of the motions of two spherical particles in three-dimensional rectangular channels in which the electric field was non-uniform. In one of the domains, two electrodes were placed in one of the sides of the channel and in the second domain the electrodes were mounted on four walls of the channel.
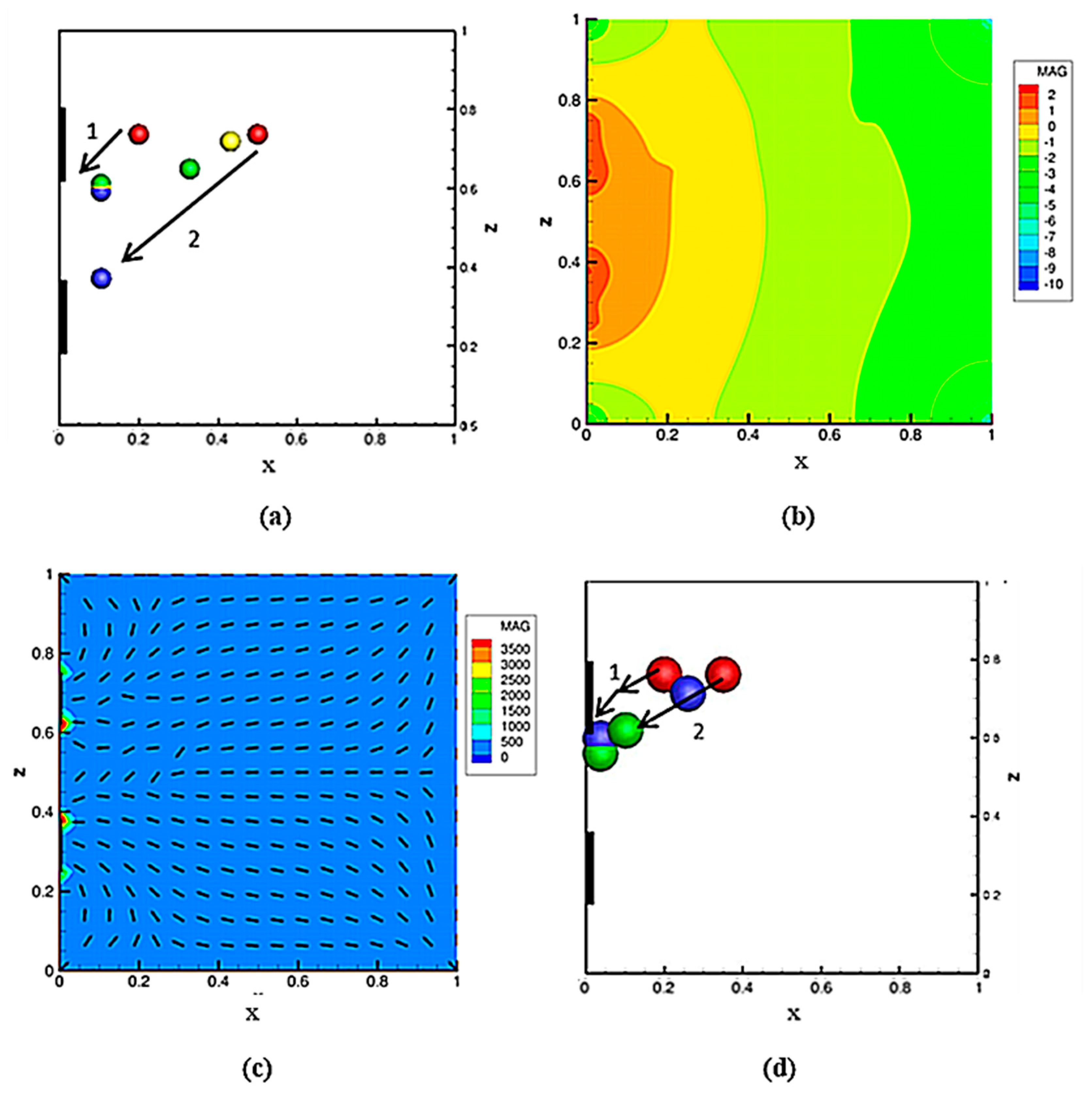
In the first domain, as shown in
Figure 2 and
Figure 3, two equally-spaced electrodes are embedded in the left wall parallel to the
yz-plane. The electrodes are mounted in the middle of the wall such that they are equidistant from the domain centerline. Notice that the electrodes cover only a fraction of the wall area and so the electric field they generate in the domain is non-uniform. We also assume that the electrodes are mounted inside the walls so that they do not affect the fluid boundary conditions on the surface. The width of the electrodes in the y-direction is equal to the domain width which ensures that the electric field does not vary in the y-direction.
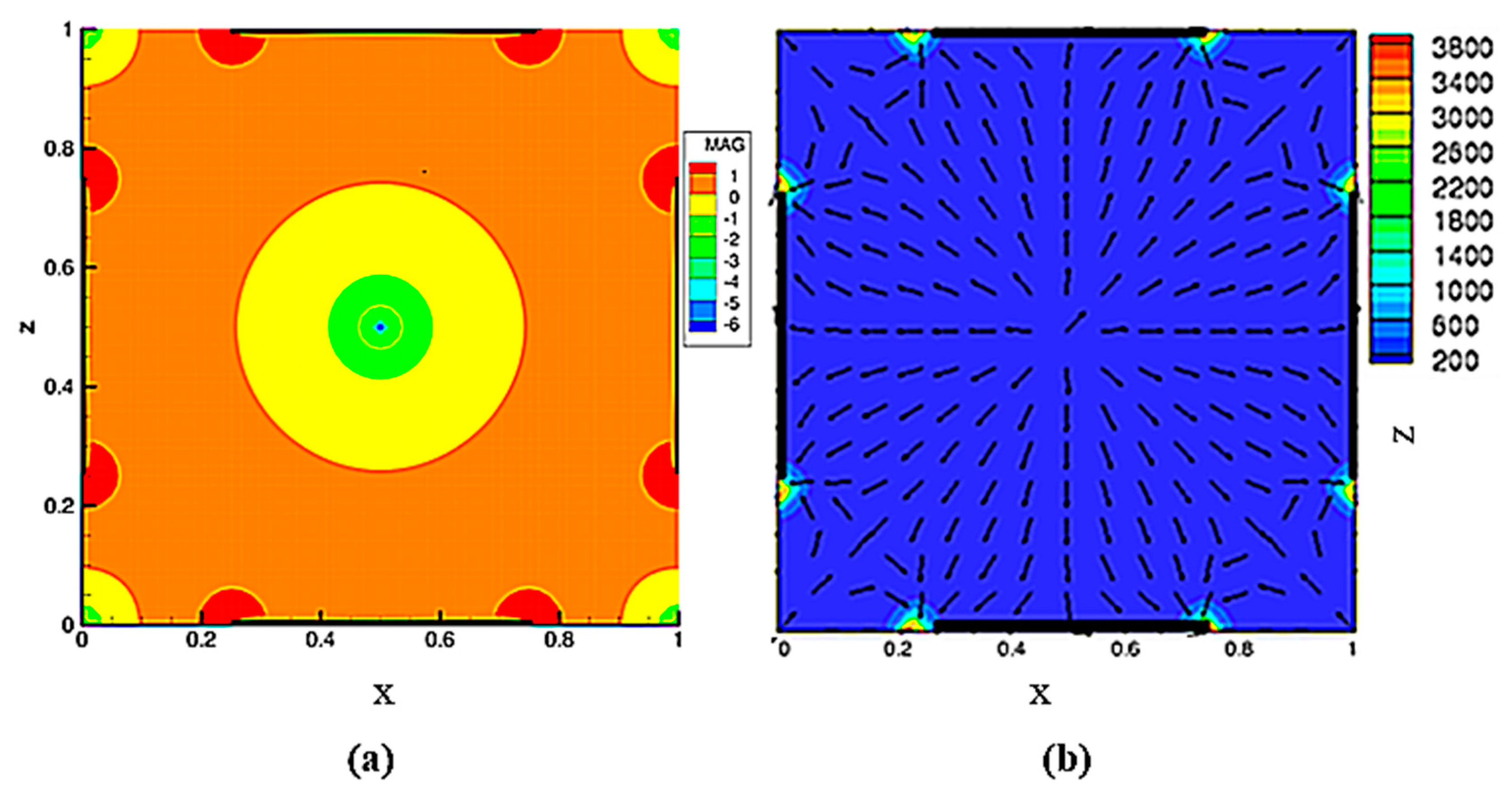
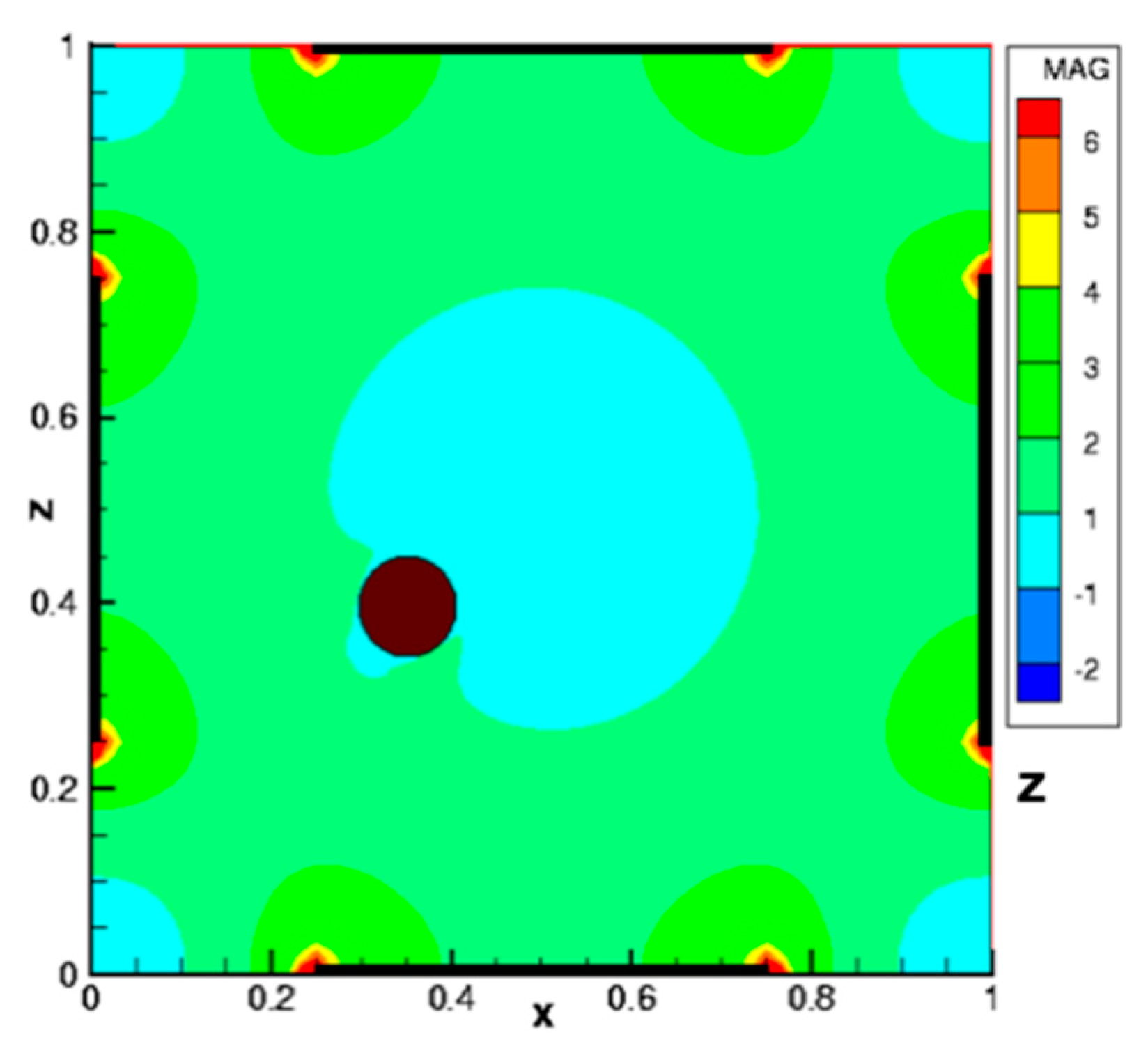
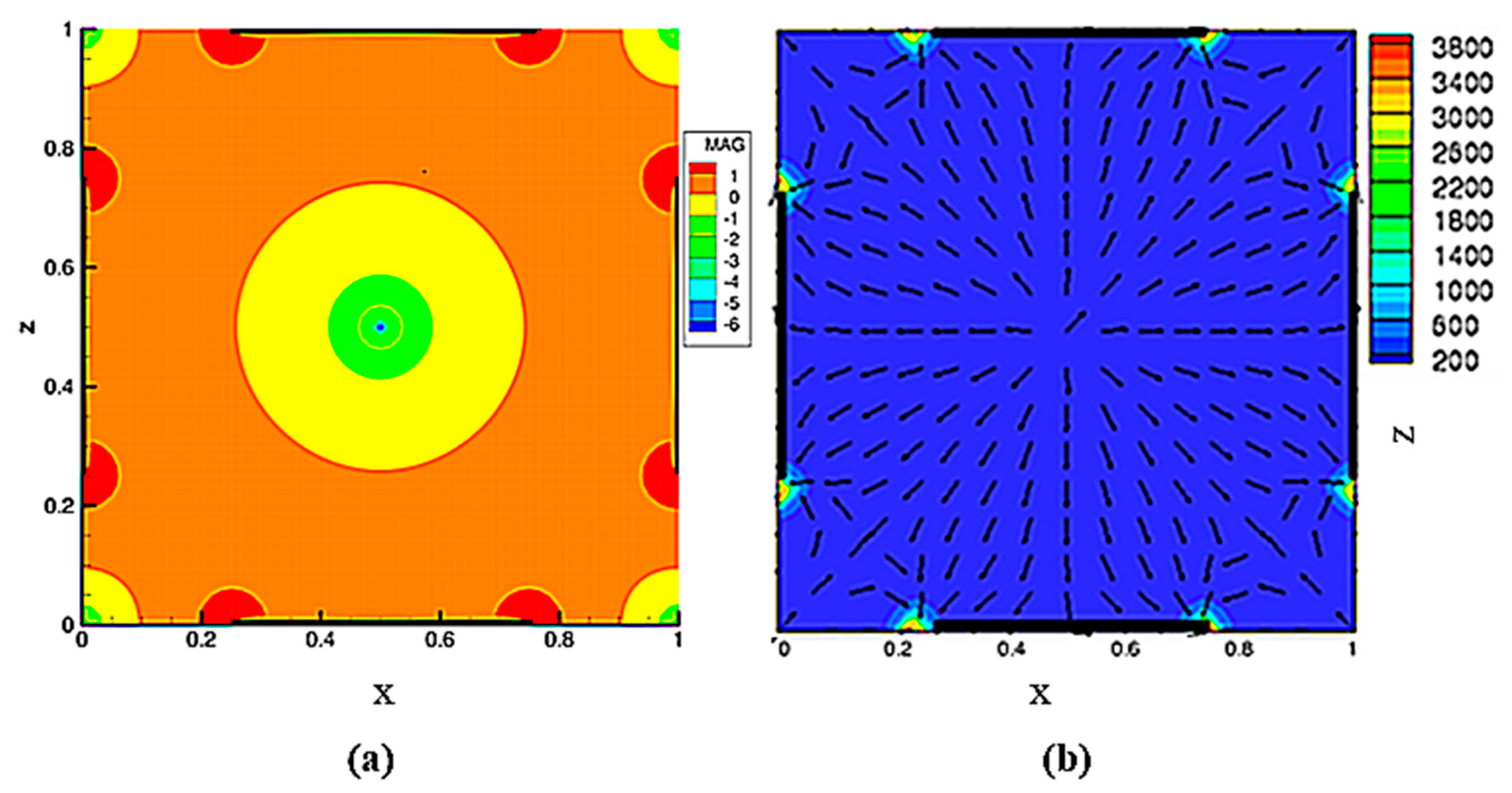
In the second domain, as shown in
Figure 4, there are four electrodes mounted in the four side walls parallel to the
yz- and
xy-planes. The electrodes are mounted in the middle of the side walls and their depth is equal to the channel depth. The width of the electrodes is one and half the width of the domain sides. This domain can be used to capture a negatively polarized particle at its center and so it is referred to as the dielectrophorectic cage configuration.
In this paper, we will assume that the fluid density = 1.0 g/cm3 and that the particles are neutrally buoyant. The fluid viscosity is = 0.01 g/(cm·s), and both particles and fluid are non-conducting. The normalized dielectric constant of particles in our simulations is varied and that of the fluid is fixed at one. We will also assume that all of the dimensions reported in this paper are in mm and the time is in seconds. In our simulations, the initial fluid and particle velocities are assumed to be zero. At the domain walls the fluid velocity is assumed to be zero.
As shown in
Figure 2, the dimensions of the computational domains in the
x-,
y- and
z-directions are
L,
L/2 and
L, respectively. All lengths are nondimensionalized by dividing by
L. The particle radius and the distance between the particles are additional characteristic length scales in this problem. Note that the particle dielectric constant has been normalized with respect to the ambient liquid. Thus, a particle with
> 1 is positively polarized and if
< 1 the particle is negatively polarized. The radius of the circles used to represent particles is smaller than the actual particle radius.
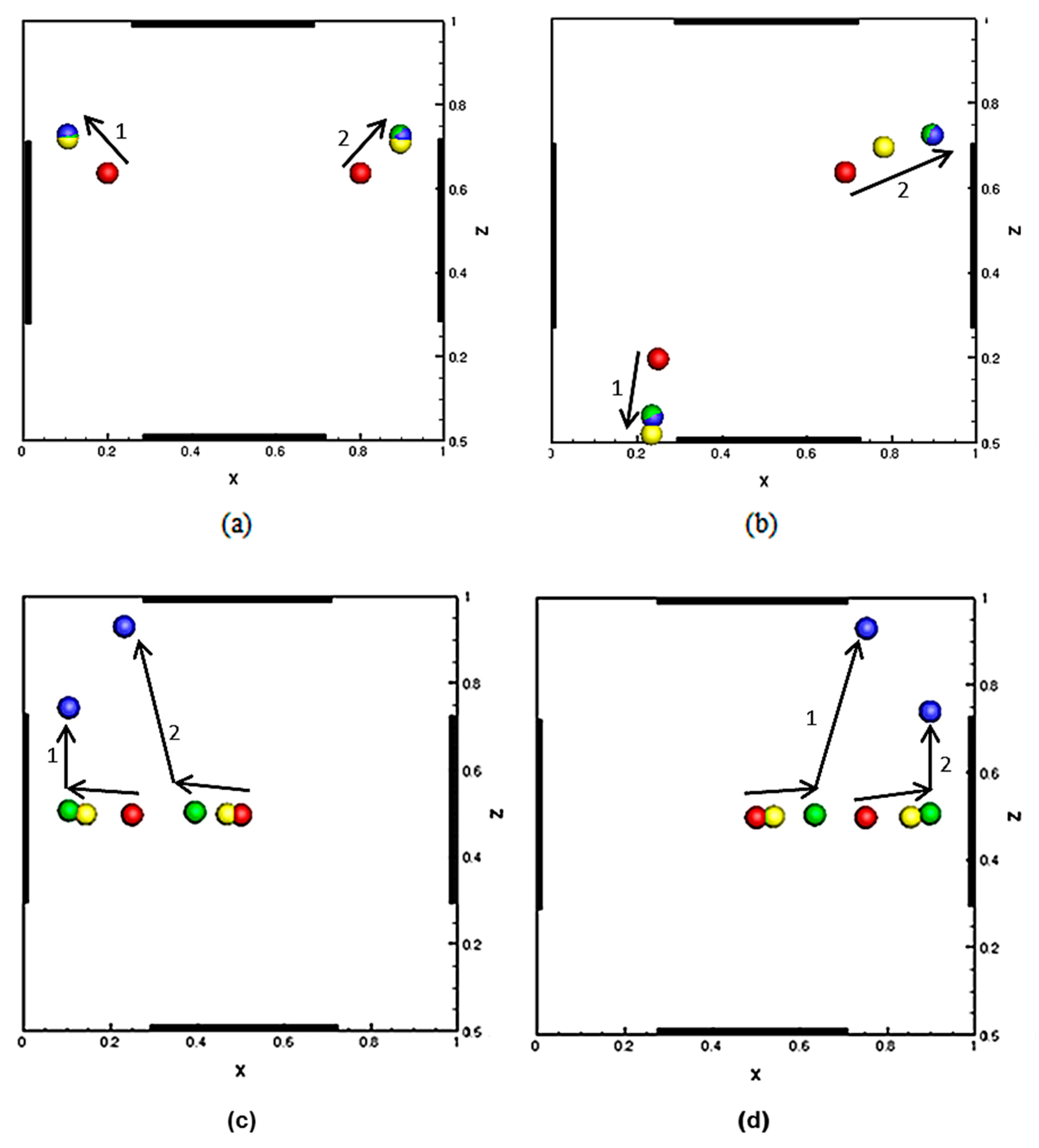
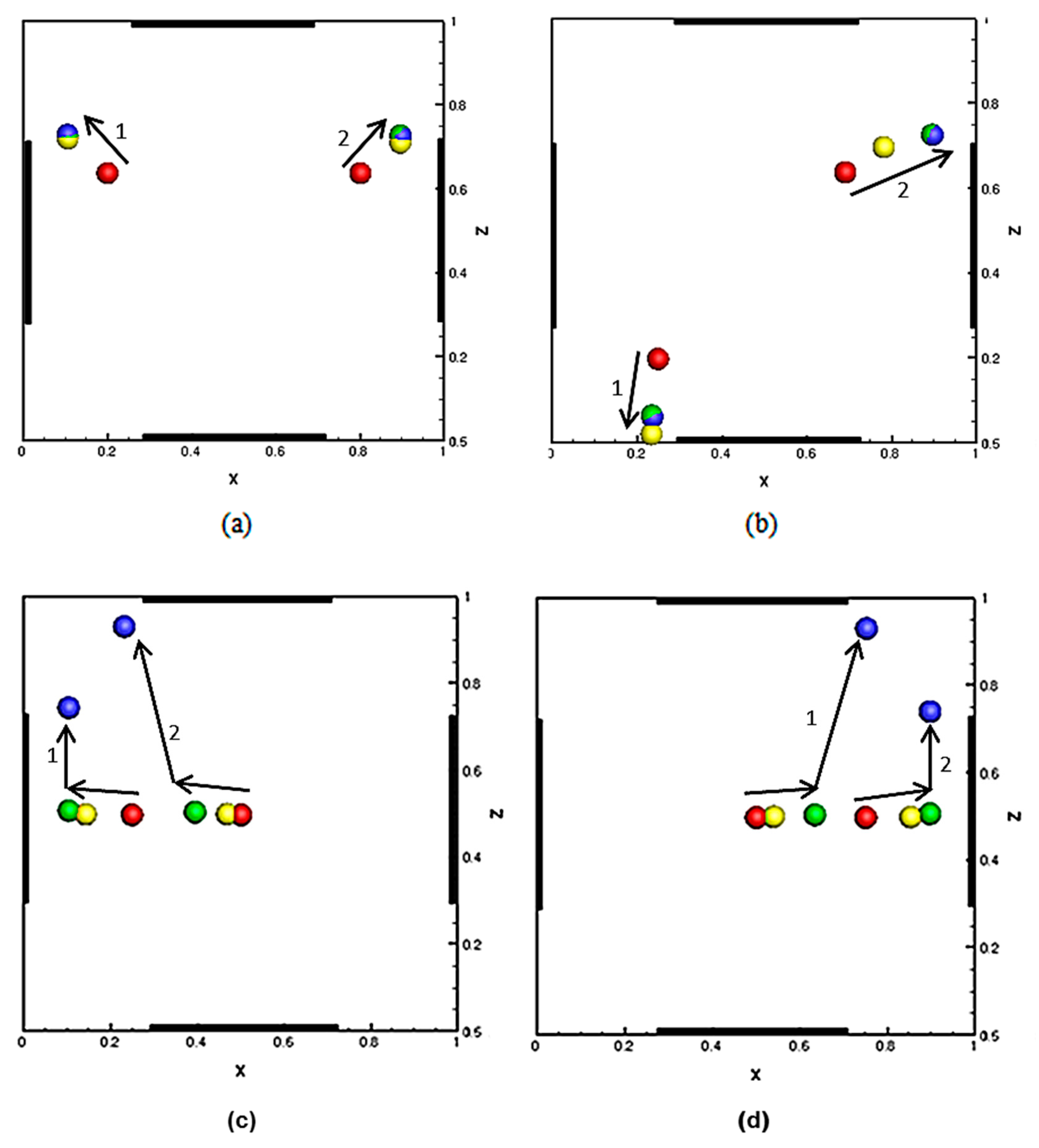
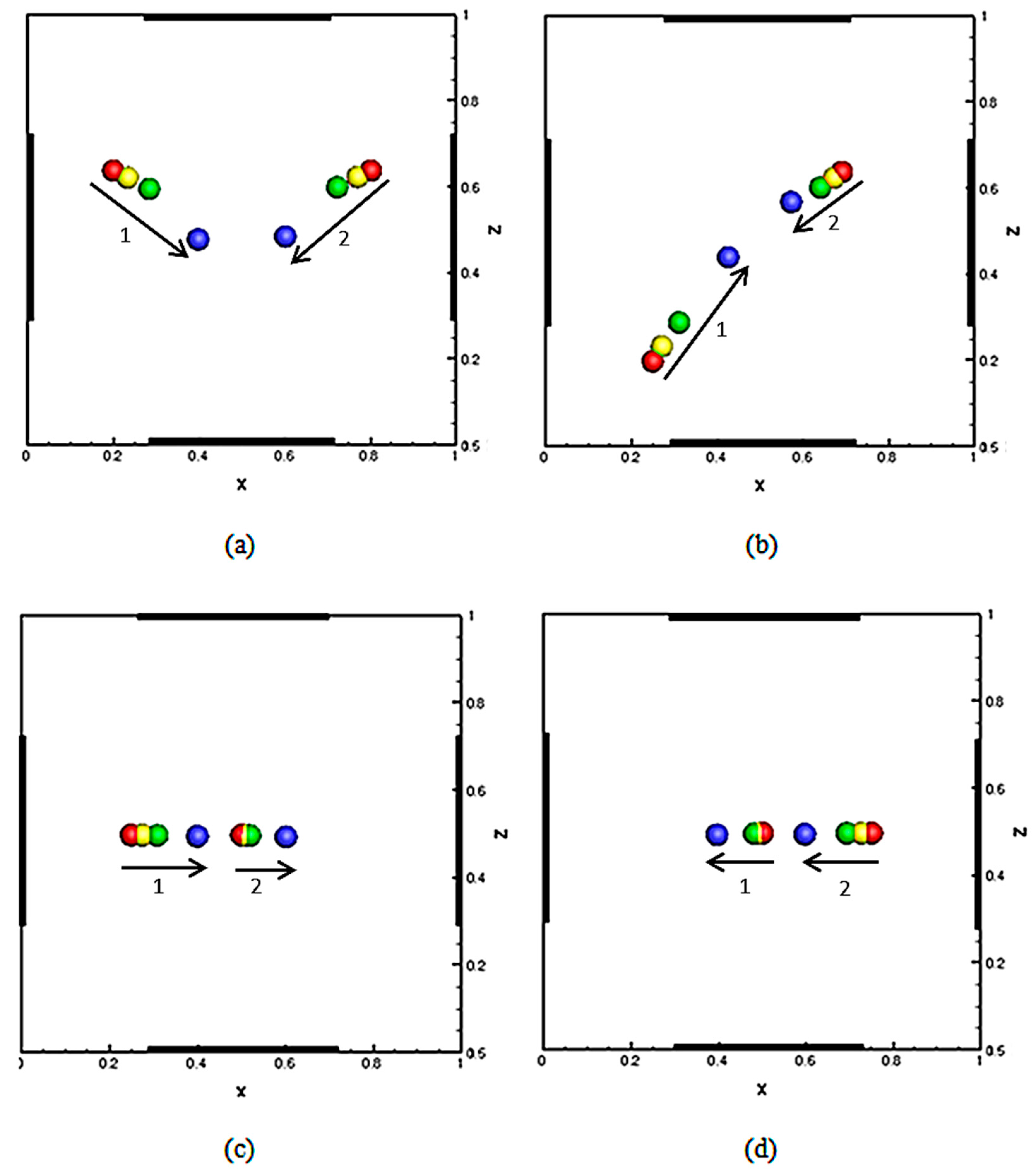
4. Conclusions
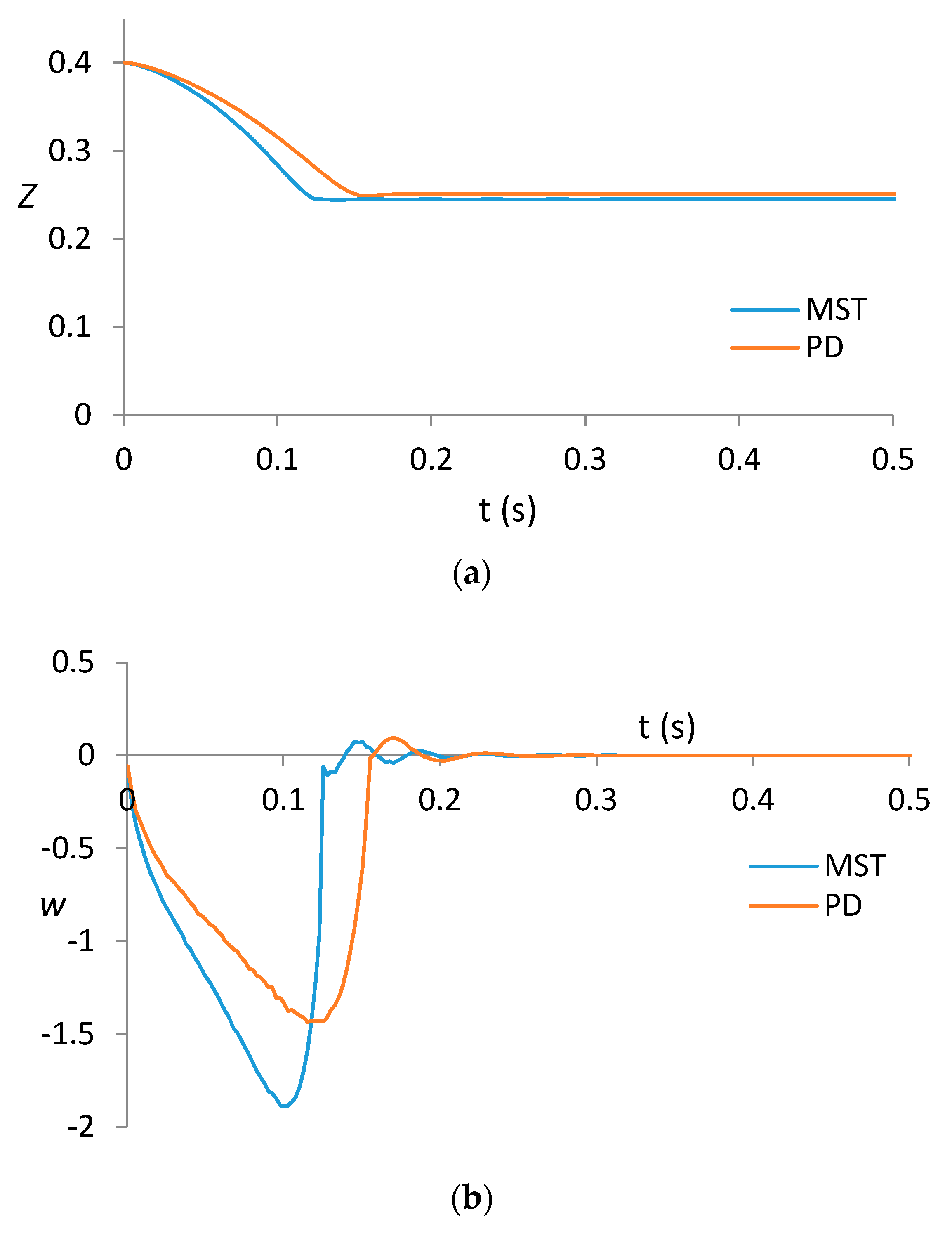
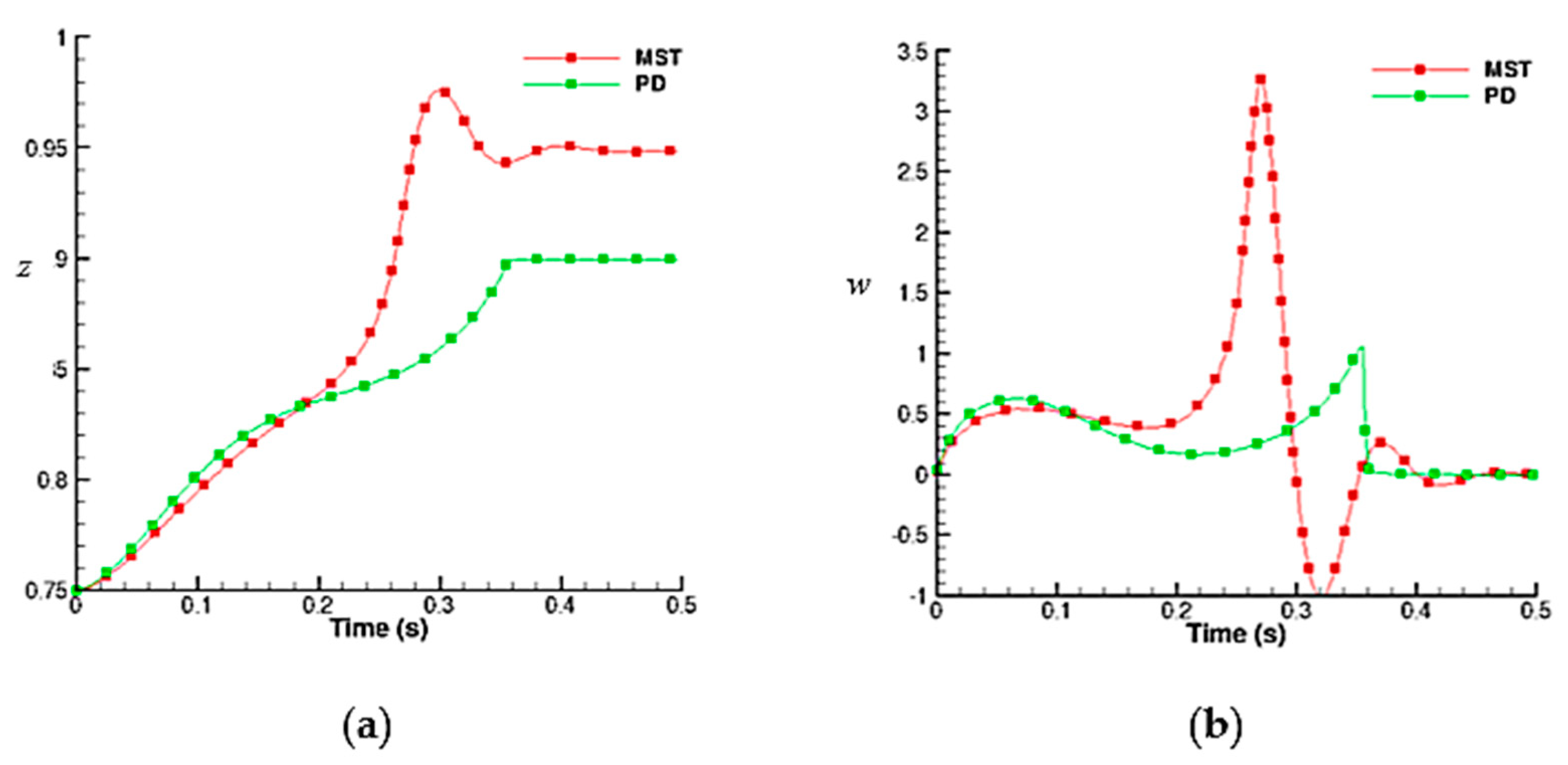
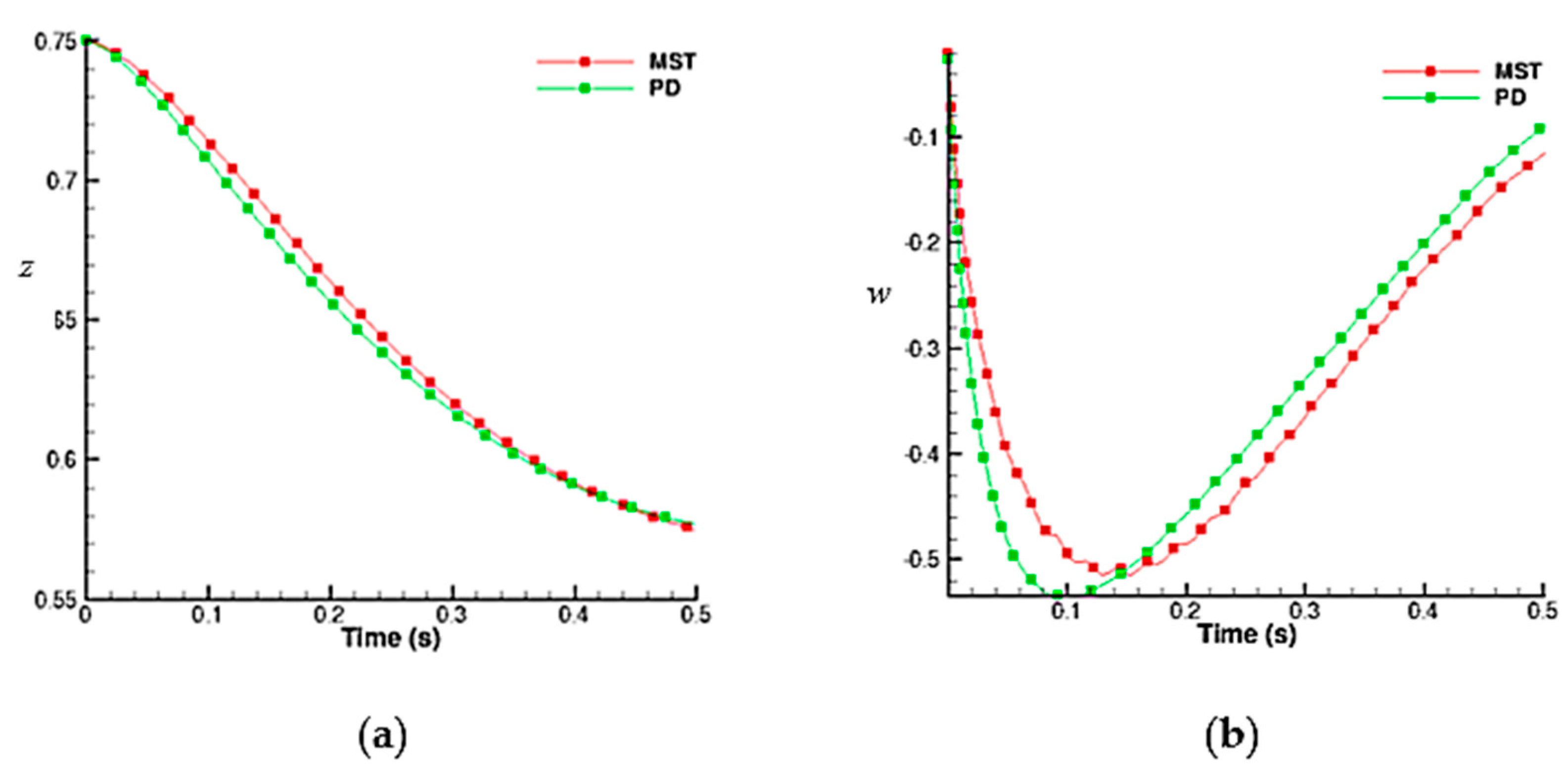
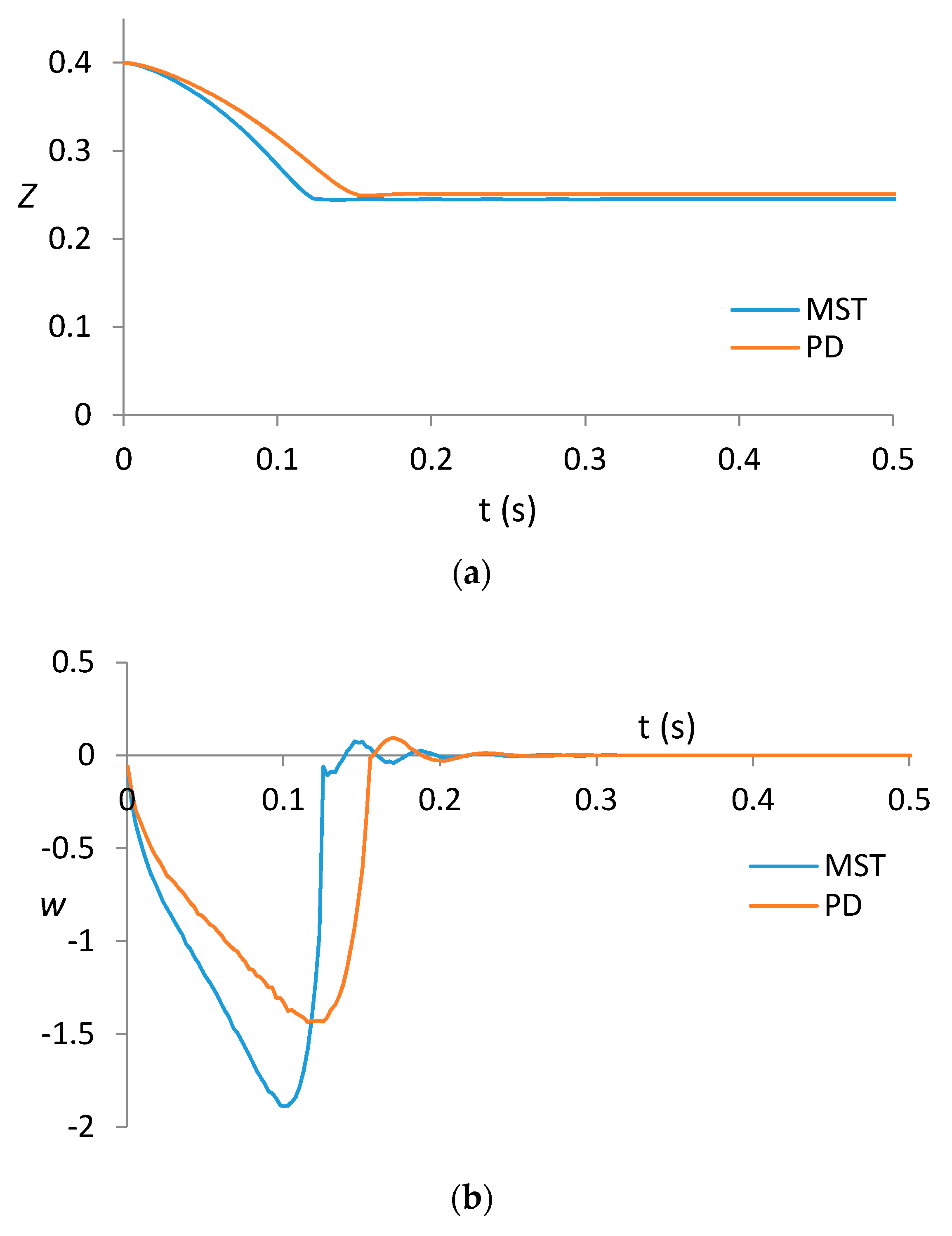
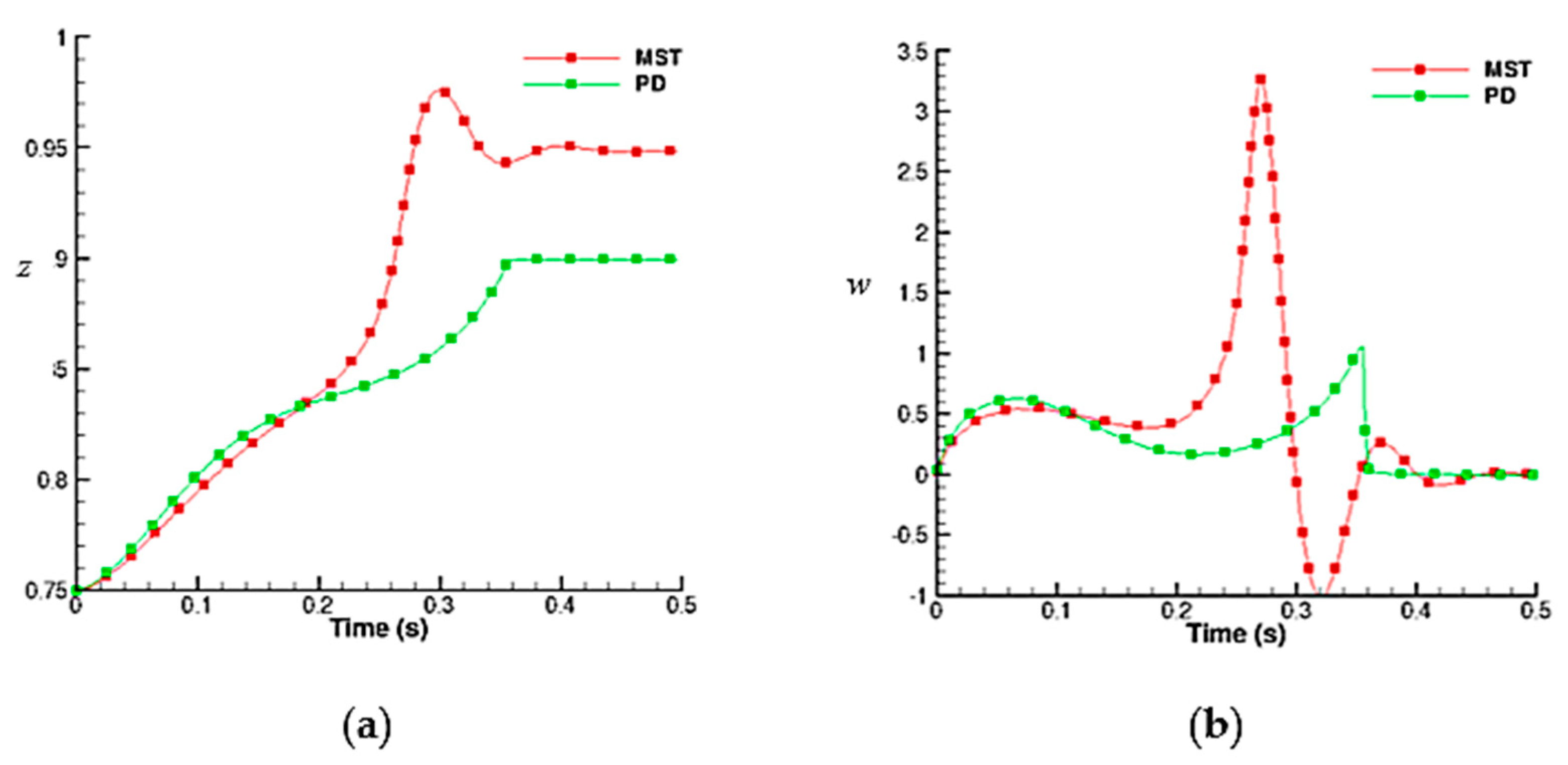
A finite element scheme based on the distributed Lagrange multiplier method is used to study the dynamical behavior of particles in a dielectrophoretic cage. The Maxwell stress tensor method is used for computing the electric forces acting on the particles, and the Marchuk-Yanenko operator-splitting technique is used to discretize in time. It is shown that a dielectrophoretic cage can be used to trap and hold negatively polarized particles at its center. If the particle moves away from the center of the cage, a resorting force acts on the particle towards the center. The cage also allows two particles to be trapped simultaneously at the center. The orientation of a trapped particle pair at the center depends on the initial positions of the particles, and in this sense, the pair orientation at the center is not fixed. Positively polarized particles, on the other hand, are trapped at the electrode edges depending on their initial locations. The particle trajectories obtained using the MST and point-dipole methods differ, but the final steady positions of the particles are approximately the same. The ratio of the particle-particle interaction and dielectrophoretic forces, P4, decreases with increasing particle size which diminishes the tendency of particles to form chains, especially when they are close to the electrodes. Also, when the spacing between the electrodes is comparable to the particle size, instead of forming chains on the same electrode, particles collect at different electrodes. This is a consequence of the modification of the electric field due to the presence of particles, which is greater for larger particles.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}