
Deformation of Gels with Spherical Auxetic Inclusions

Abstract
1. Introduction
2. Results
- Matrix: fully conventional sample (Em, υm);
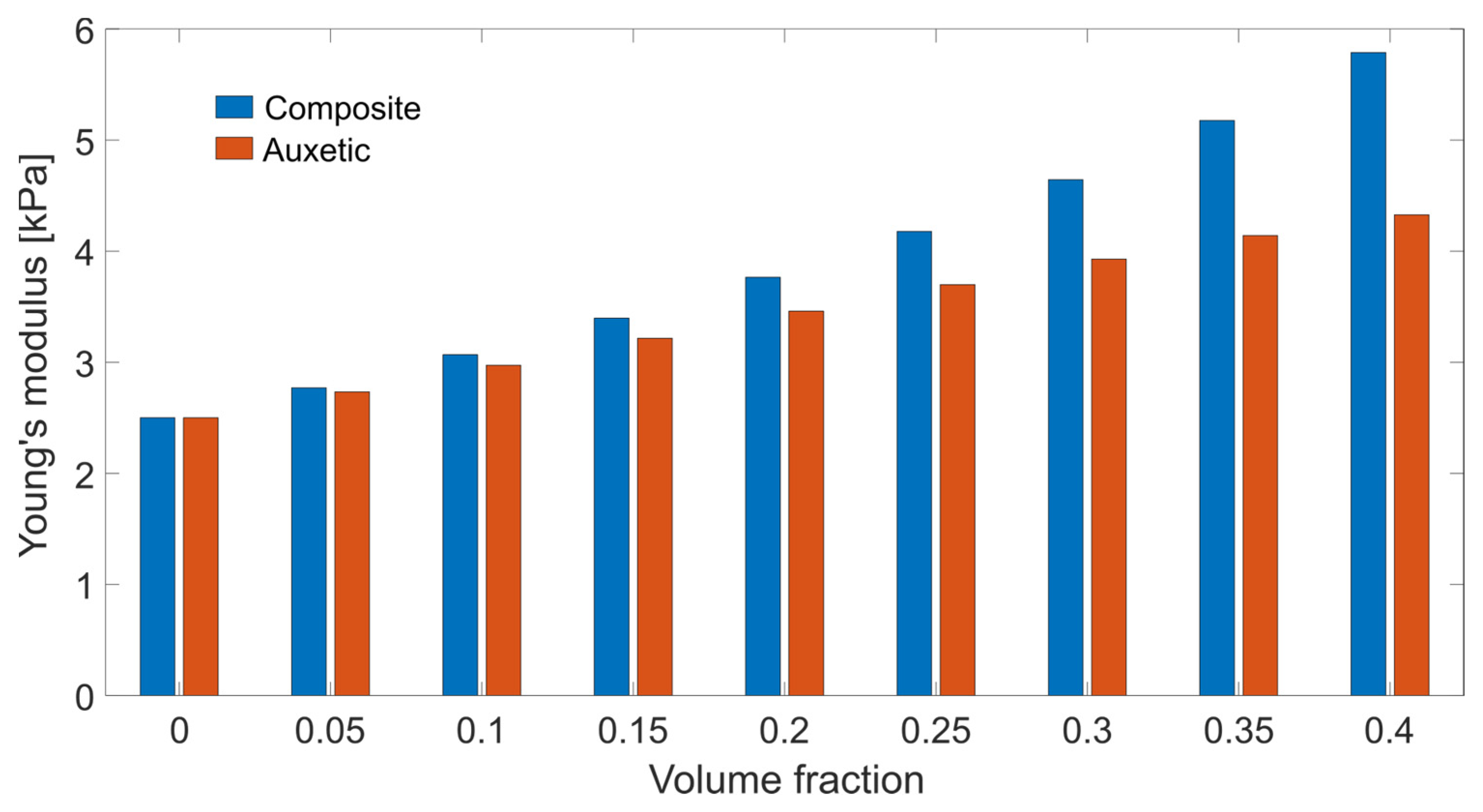
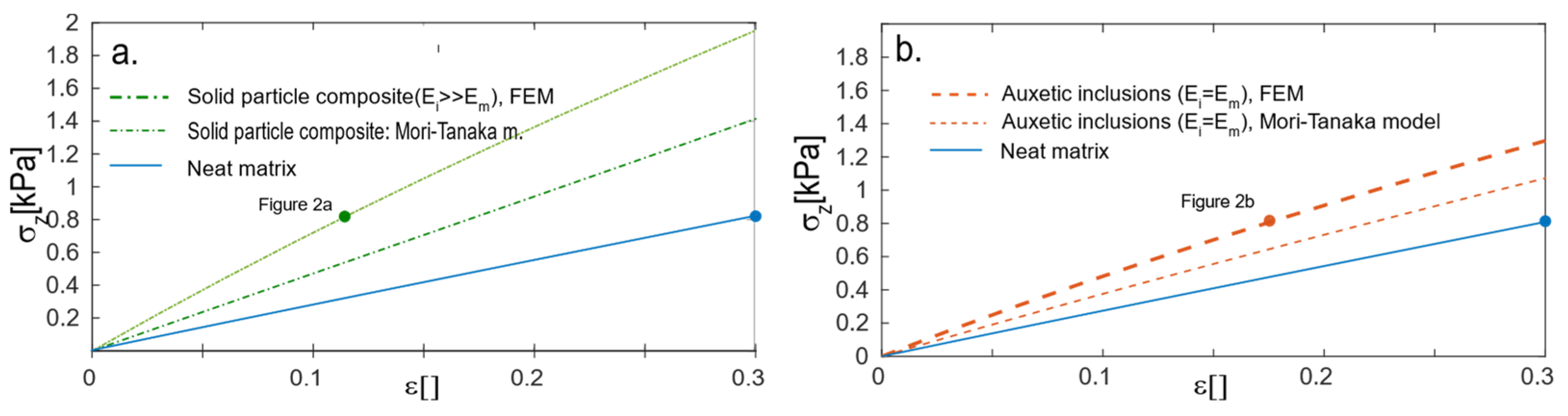
- Composite gel: conventional matrix filled with rigid particles (Em ≪ Ep, υm = υp);
- Auxetic gel: conventional matrix filled with auxetic particles (Em = Ep, υm > 0, υp < 0).
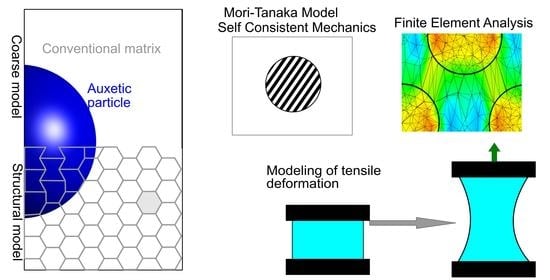
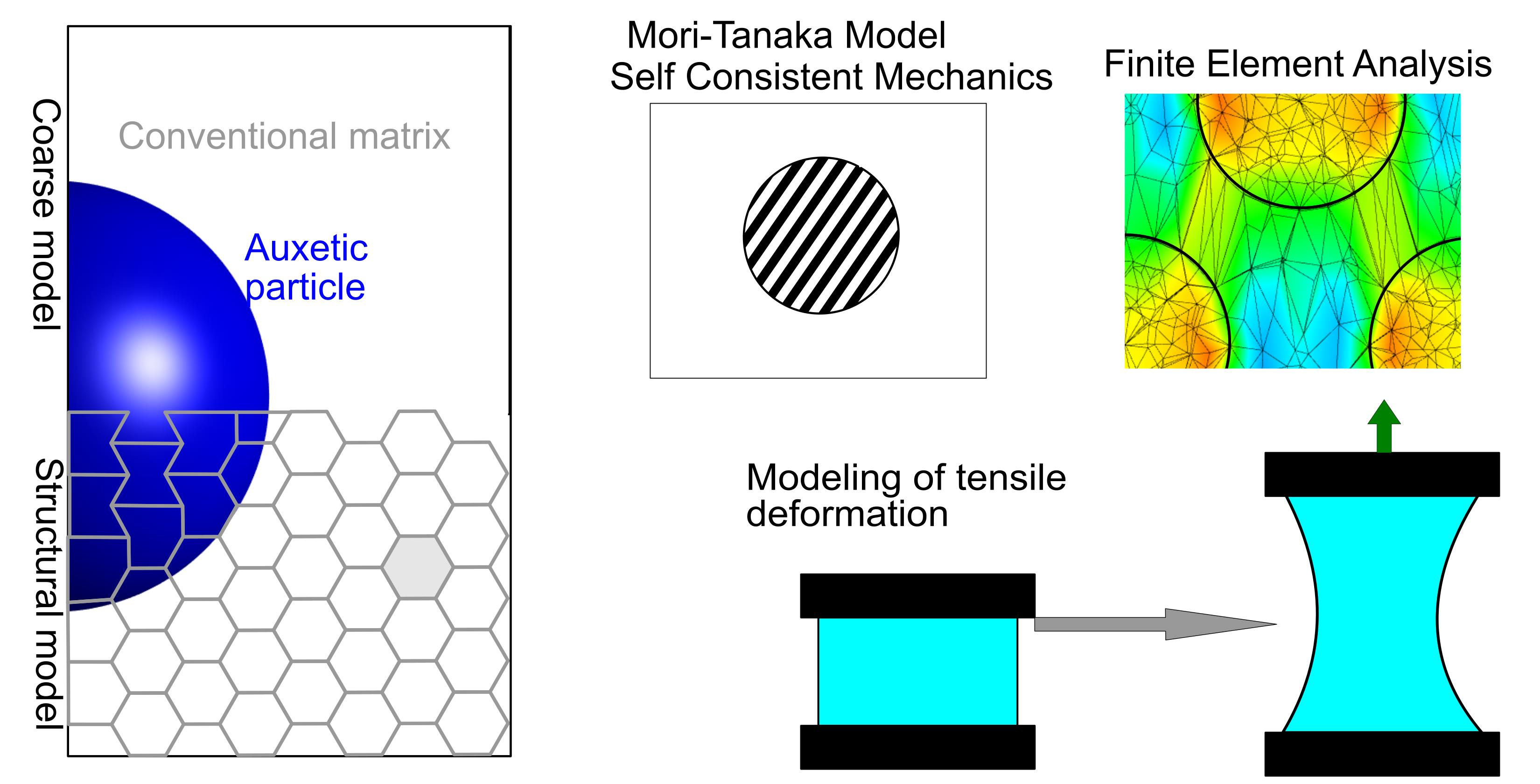
- Models based on the FEM (R, S);
- Models based on micromechanics (S).
- (S)
- Solid phase modeling: The particles and matrix were modelled as a continuum, and the auxetic function was introduced by the prescription of a negative Poisson’s ratio to the solid object.
- (R)
- Real material design: A negative Poisson’s ratio was introduced by designing auxetic cells in the material, and the rigid particle was based on the reinforcement of the cells in the material.
2.1. Models from Micromechanics
2.1.1. Mori–Tanaka Model
2.1.2. The Self-Consistent Mechanics Theory
2.2. Simulations
3. Discussion
3.1. Reinforcing Effect of Auxetic Spherical Inclusion
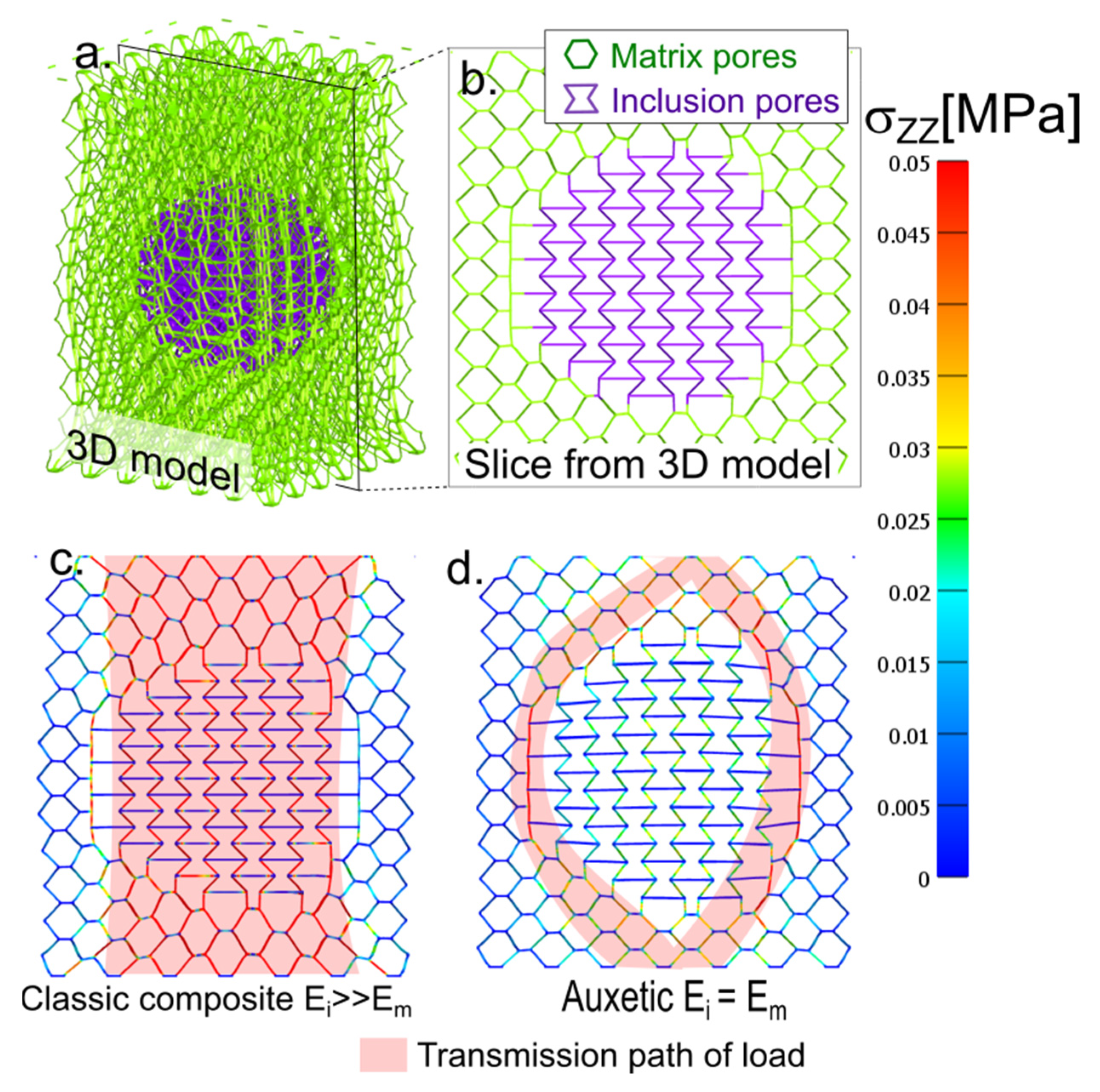
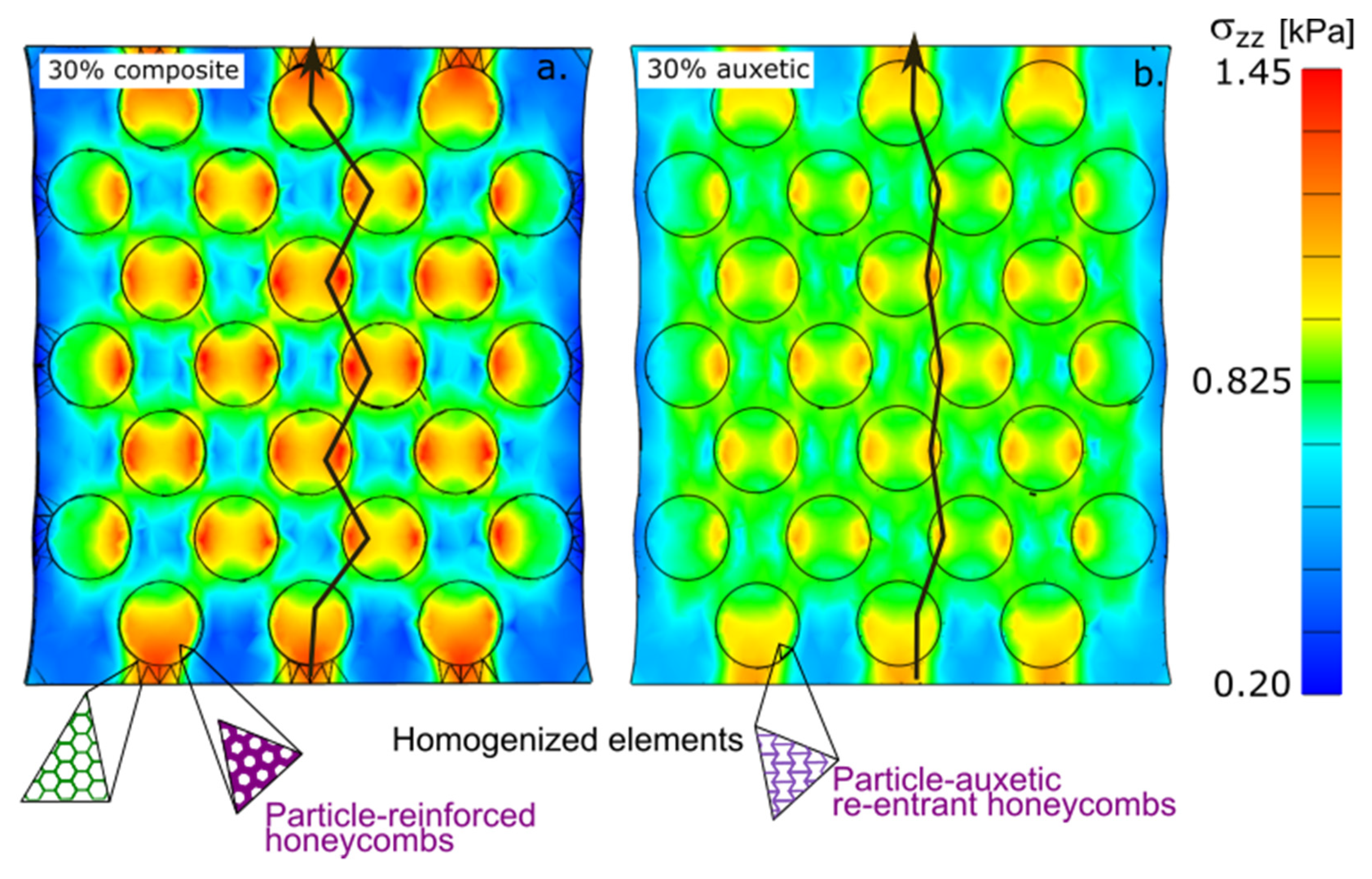
3.2. Distribution of Stress
4. Conclusions
5. Materials, Models, and Methods
5.1. Model-Finite Element Method
5.2. Detailed Model with Real Auxetic Configuration
5.3. Model of Multiple Particles in a Cubic Box
5.4. All Simulated Materials Were Modeled as Neo-Hookean Solid Bodies
- The single-particle model material for the 3D honeycomb structure was monolithic in the entire sample. There was no projected material interphase. The boundary between the inclusion and the matrix was only in the structure of the conventional/reentrant honeycombs;
- The heterogeneous material with the 3D honeycomb had a soft matrix (Item i.). The model was heterogeneous, and the modulus of inclusion was 40-fold stiffer than the matrix modulus. The high modulus led to rigid inclusion;
- A neat matrix in a coarse model was modeled from the material with Poisson’s ratio of zero because there was no stress concentration in any material. The zero value of Poisson’s ratio was more or less similar to the weighted average value of a 30% composite gel with auxetic inclusion;
- The composite material that included auxetic particles had a homogenous modulus in the entire sample: matrix and inclusion. However, the matrix had a positive Poisson’s ratio, and the inclusions had a prescribed negative Poisson’s ratio;
- In the standard solid particle composite gel, the particle had a 40-fold higher modulus than the matrix. The particles were nearly undeformable. In case 2, the Poisson’s ratio of the particle played no role.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gulfam, M.; Jo, S.H.; Jo, S.W.; Vu, T.T.; Park, S.H.; Lim, K.T. Highly porous and injectable hydrogels derived from cartilage acellularized matrix exhibit reduction and NIR light dual-responsive drug release properties for application in antitumor therapy. NPG Asia Mater. 2022, 14, 8. [Google Scholar] [CrossRef]
- Takeno, H.; Suto, N. Robust and highly stretchable chitosan nanofiber/alumina-coated silica/carboxylated poly (vinyl alcohol)/Borax composite hydrogels constructed by multiple crosslinking. Gels 2022, 8, 6. [Google Scholar] [CrossRef]
- Kirschner, C.M.; Anseth, K.S. Hydrogels in healthcare: From static to dynamic material microenvironments. Acta Mater. 2013, 61, 931–944. [Google Scholar] [CrossRef] [PubMed]
- Guenet, J.M. Hybrid physical gels from polymers and self-assembled systems: A novel path for making functional materials. Gels 2018, 4, 35. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Liu, X.; Ren, X.; Gao, G. The role of chemical and physical crosslinking in different deformation stages of hybrid hydrogels. Eur. Polym. J. 2018, 100, 86–95. [Google Scholar] [CrossRef]
- Jancar, J.; Jancarova, E.; Zidek, J. Combining reptation dynamics and percolation in modelling viscoelastic response of collagen-based nanocomposites. J. Comput. Theor. Nanosci. 2010, 7, 1257–1264. [Google Scholar] [CrossRef]
- Chawla, N.; Sidhu, R.; Ganesh, V. Three-dimensional visualization and microstructure-based modeling of deformation in particle-reinforced composites. Acta Mater. 2006, 54, 1541–1548. [Google Scholar] [CrossRef]
- Zeng, W.; Liu, G.R. Smoothed finite element methods (s-fem). Arch. Comput. Method E 2018, 25, 397–435. [Google Scholar] [CrossRef]
- Heydari-Meybodi, M.; Saber-Samandari, S.; Sadighi, M. 3D multiscale modeling to predict the elastic modulus of polymer/nanoclay composites considering realistic interphase property. Compos. Interface 2016, 23, 641–661. [Google Scholar] [CrossRef]
- Zhang, L.; Roy, S.; Chen, Y.; Chua, E.K.; See, K.Y.; Hu, X.; Liu, X. Mussel-inspired polydopamine coated hollow carbon microspheres, a novel versatile filler for fabrication of high-performance syntactic foams. ACS Appl. Mater. Interfaces 2014, 6, 18644–18652. [Google Scholar] [CrossRef]
- Ozkutlu, M.; Dilek, C.; Bayram, G. Poly(methyl methacrylate) hybrid syntactic foams with hollow glass microspheres and polyhedral oligomeric silsesquioxanes. J. Appl. Polym. Sci. 2019, 137, 48368. [Google Scholar] [CrossRef]
- Jancar, J.; Zarybnicka, K.; Zidek, J.; Kucera, F. Effect of porosity gradient on mechanical properties of cellular nano-composites. Polymers 2020, 12, 681. [Google Scholar] [CrossRef] [PubMed]
- Gupta, N.; Ye, R.; Porfiri, M. Comparison of tensile and compressive characteristics of vinyl ester/glass microballoon syntactic foams. Compos. Part B Eng. 2010, 41, 236–245. [Google Scholar] [CrossRef]
- Love, A. A Treatise on the Mathematical Theory of Elasticity, 1st ed.; The University Press: Cambridge, UK, 1892. [Google Scholar]
- Evans, K.E. Auxetic polymers. Endeavour 1991, 15, 170–174. [Google Scholar] [CrossRef]
- Chan, N.; Evans, K.E. Fabrication methods for auxetic foams. J. Mater. Sci. 1991, 32, 5945–5953. [Google Scholar] [CrossRef]
- Gardner, G.B.; Venkataraman, D.; Moore, J.S.; Lee, S. Spontaneous assembly of a hinged coordination network. Nature 1995, 374, 792–795. [Google Scholar] [CrossRef]
- Wei, G.; Edwards, S.F. Poisson ratio in composites of auxetics. Phys. Rev. E 1998, 58, 6173–6181. [Google Scholar] [CrossRef]
- Evans, K.; Nkansah, M.; Hutchinson, I. Auxetic foams: Modelling negative Poisson’s ratios. Acta Met. Mater. 1994, 42, 1289–1294. [Google Scholar] [CrossRef]
- Imbalzano, G.; Tran, P.; Ngo, T.D.; Lee, P.V. A numerical study of auxetic composite panels under blast loadings. Compos. Struct. 2016, 135, 339–352. [Google Scholar] [CrossRef]
- Lim, T.C.; Acharia, U. An hexagonal array of fourfold interconnected hexagonal nodules for modeling auxetic microporous polymers. J. Mater. Sci. 2009, 44, 4491–4494. [Google Scholar] [CrossRef]
- Dirrenberger, J.; Forest, S.; Jeulin, D. Effective elastic properties of aux etic microstructures. Int. J. Mech. Mater. Des. 2013, 9, 21–33. [Google Scholar] [CrossRef]
- Lei, M.; Hong, W.; Zhao, Z.; Hamel, C.; Chen, M.; Lu, H.; Qi, H.J. 3D printing of auxetic metamaterials with digitally reprogrammable shape. ACS Appl. Mater. Inter. 2019, 11, 22768–22776. [Google Scholar] [CrossRef] [PubMed]
- Meena, K.; Singamneni, S. A new auxetic structure with significantly reduced stress concentration effects. Mater. Des. 2019, 173, 107779. [Google Scholar] [CrossRef]
- Francesconi, L.; Baldi, A.; Liang, X.; Aymerich, F.; Taylor, M. Variable Poisson’s ratio materials for globally stable static and dynamic compression resistance. Extrem. Mech. Lett. 2019, 26, 1–7. [Google Scholar] [CrossRef]
- Zheng, X.; Guo, X.; Watanabe, I. A mathematically defined 3D auxetic metamaterial with tunable mechanical and conduction properties. Mater. Des. 2021, 198, 109313. [Google Scholar] [CrossRef]
- Wang, Z.; Hu, H. Auxetic materials and their potential applications in textiles. Text. Res. J. 2014, 84, 1600–1611. [Google Scholar] [CrossRef]
- Ungureanu, B.; Achaoui, Y.; Enoch, S.; Brule, S.; Guenneau, S.; Christos, A.; Alessio, M. Auxetic-like metamaterials as novel earthquake protections. EPJ Appl. Metamat. 2015, 2, 17. [Google Scholar] [CrossRef]
- Kuskun, T.; Smardzewski Jand Kasal, A. Experimental and numerical analysis of mounting force of auxetic dowels for furniture joints. Eng. Struct. 2021, 226, 111351. [Google Scholar] [CrossRef]
- Soman, P.; Lee, J.W.; Phadke, A.; Varghese, S.; Chen, S. Spatial tuning of negative and positive Poisson’s ratio in a multi-layer scaffold. Acta Biomater. 2012, 8, 2587–2594. [Google Scholar] [CrossRef]
- Mardling, P.; Alderson, A.; Jordan-Mahy, N.; Maitre, C.L.L. The use of auxetic materials in tissue engineering. Biomater. Sci. 2020, 8, 2074–2083. [Google Scholar] [CrossRef]
- Grima, J.N.; Alderson, A.; Evans, K.E. Negative Poisson’s ratios from rotating rectangles. Comput. Methods Sci. Technol. 2004, 10, 137–145. [Google Scholar] [CrossRef]
- Grima, J.N.; Evans, K.E. Auxetic behavior from rotating triangles. J. Mater. Sci. 2006, 41, 3193–3196. [Google Scholar] [CrossRef]
- Lira, C.; Scarpa, F. Transverse shear stiffness of thickness gradient honeycombs. Compos. Sci. Technol. 2010, 70, 930–936. [Google Scholar] [CrossRef]
- Hou, Y.; Neville, R.; Scarpa, F.; Remillat, C.; Gu, B.; Ruzzene, M. Graded conventional-auxetic kirigami sandwich structures. Compos. Part B Eng. 2014, 59, 33–42. [Google Scholar] [CrossRef]
- Jang, K.I.; Chung, H.U.; Xu, S.; Lee, C.H.; Luan, H.; Jeong, J.; Cheng, H.; Kim, G.T.; Han, S.Y.; Lee, J.W.; et al. Soft network composite materials with deterministic and bio-inspired designs. Nat. Commun. 2015, 6, 6566. [Google Scholar] [CrossRef]
- Glozman, T.; Azhari, H. A method for characterization of tissue elastic properties combining ultrasonic computed tomography with elastography. J. Ultras. Med. 2010, 29, 387–398. [Google Scholar] [CrossRef]
- Ou, J.; Ma, Z.; Peters, J.; Dai, S.; Vlavianos, N.; Ishii, H. Kinetix-designing auxetic-inspired deformable material structures. Comput. Graph. 2018, 75, 72–81. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, H.; Zhu, Y. A flexible piezoresistive carbon black network in silicone rubber for wide range deformation and strain sensing. J. Appl. Phys. 2018, 123, 034505. [Google Scholar] [CrossRef]
- Zhu, J.; Zhu, Y.; Song, Y.; Wang, H.; Gao, M.; Cho, M.; Park, I. Zinc oxide-enhanced piezoelectret polypropylene microfiber for mechanical energy harvesting. ACS Appl. Mater. Interfaces 2018, 10, 19940–19947. [Google Scholar] [CrossRef]
- Jiang, Y.; Liu, Z.; Matsuhisa, N.; Qi, D.; Leow, W.R.; Yang, H.; Yu, J.; Chen, G.; Liu, Y.; Wan, C.; et al. Auxetic mechanical metamaterials to enhance sensitivity of stretchable strain sensors. Adv. Mater. 2018, 30, 1706589. [Google Scholar] [CrossRef]
- Li, F.; Hu, R. Metamaterials-enabled sensing for human-machine interfacing. Sensors 2021, 21, 161. [Google Scholar] [CrossRef]
- Hashin, Z.; Shtrikman, S. A variational approach to the theory of the elastic behaviour of multiphase materials. J. Mech. Phys. Solids 1963, 11, 127–140. [Google Scholar] [CrossRef]
- Aboudi, J.; Arnold, S.M.; Bednarcyk, B.A. Micromechanics of Composite Materials, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Kontou, E. Micromechanics model for particulate composites. Mech. Mater. 2007, 39, 702–709. [Google Scholar] [CrossRef]
- Eshelby, J.D. The determination of the elastic field of an ellipsoidal inclusion, and related problems. Proc. R. Soc. London. Ser. Math. Phys. Sci. 1957, 241, 376–396. [Google Scholar] [CrossRef]
- Weinberger, C.; Cai, W. Eshelby’s Inclusion ii: Energy, in: Lecture Notes—Elasticity of Microscopic Structures, 1st ed.; Stanford University: Stanford, UK, 2005; pp. 43–56. [Google Scholar]
- Hill, R. A self-consistent mechanics of composite materials. J. Mech. Phys. Solids 1965, 13, 213–222. [Google Scholar] [CrossRef]
- Budiansky, B. On the elastic moduli of some heterogeneous materials. J. Mech. Phys. Solids 1965, 13, 223–227. [Google Scholar] [CrossRef]
- Mori, T.; Tanaka, K. Average stress in matrix and average elastic energy of materials with misfitting inclusions. Acta Met. Mater. 1973, 21, 571–574. [Google Scholar] [CrossRef]
- Benveniste, Y. A new approach to the application of Mori–Tanaka’s theory in composite materials. Mech. Mater. 1987, 6, 147–157. [Google Scholar] [CrossRef]
- Tsai, J.; Patra, A.; Wetherhold, R. Numerical simulations of fracture toughness improvement using short shaped head ductile fibers. Compos. Part A Appl. S 2003, 34, 1255–1264. [Google Scholar] [CrossRef]
- Moesen, M.; Cardoso, L.; Cowin, S.C. A symmetry invariant formulation of the relationship between the elasticity tensor and the fabric tensor. Mech. Mater. 2012, 54, 70–83. [Google Scholar] [CrossRef]
- Mukhopadhyay, T.; Adhikari, S. Equivalent in-plane elastic properties of irregular honeycombs. Int. J. Solids Struct. 2016, 91, 169–184. [Google Scholar] [CrossRef]
- Zidek, J.; Kucera, J.; Jancar, J. Model of random spatial packing of rigid spheres with controlled macroscopic homogeneity. Cmc-Comput. Mater. Contin. 2010, 16, 51–73. [Google Scholar] [CrossRef]
- Moerman, K.M. GIBBON: The Geometry and Image-Based Bioengineering add-On. J. Open Source Softw. 2018, 3, 506. [Google Scholar] [CrossRef]
- Maas, S.A.; Ellis, B.J.; Ateshian, G.A.; Weiss, J.A. FEBio: Finite Elements for Biomechanics. J. Biomed. Eng. 2012, 134, 011005. [Google Scholar] [CrossRef]
- Maas, S.A.; LaBelle, S.A.; Ateshian, G.A.; Weiss, J.A. A plugin framework for extending the simulation capabilities of FEBIO. Biophys. J. 2018, 115, 1630–1637. [Google Scholar] [CrossRef] [PubMed]
- Pendry, J.B.; Schurig, D.; Smith, D.R. Controlling Electromagnetic Fields. Science 2006, 312, 1780–1782. [Google Scholar] [CrossRef]
- Ni, X.; Wong, Z.J.; Mrejen, M.; Wang, Y.; Zhang, X. An ultrathin invisibility skin cloak for visible light. Science 2015, 349, 1310–1314. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Name | Em [kPa] | Ei [kPa] | υm | υi | Description |
|---|---|---|---|---|---|
| 3D-cellular auxetic a inclusion | 2.5 * | 2.5 △ | 0.49 * | 0.49 △ | 3D-cellular conventional */reentrant △ honeycomb structure |
| 3D-cellular undeformable inclusion | 2.5 * | 100 △ | 0.49 * | 0.49 △ | - |
| Matrix | 2.5 | - | 0.00 | - | Neat matrix with zero transversal deformation |
| Auxetic inclusion | 2.5 | 2.5 | 0.39 | –0.9 | Material with homogenous rigidity inclusion is auxetic |
| Composite inclusion | 2.5 | 100 | 0.39 | 0.2 | Standard composite: soft matrix, rigid particle |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zidek, J.; Polacek, P.; Jancar, J. Deformation of Gels with Spherical Auxetic Inclusions. Gels 2022, 8, 698. https://doi.org/10.3390/gels8110698
Zidek J, Polacek P, Jancar J. Deformation of Gels with Spherical Auxetic Inclusions. Gels. 2022; 8(11):698. https://doi.org/10.3390/gels8110698
Chicago/Turabian StyleZidek, Jan, Petr Polacek, and Josef Jancar. 2022. "Deformation of Gels with Spherical Auxetic Inclusions" Gels 8, no. 11: 698. https://doi.org/10.3390/gels8110698
APA StyleZidek, J., Polacek, P., & Jancar, J. (2022). Deformation of Gels with Spherical Auxetic Inclusions. Gels, 8(11), 698. https://doi.org/10.3390/gels8110698