
High-Resolution UAV RGB Imagery Dataset for Precision Agriculture and 3D Photogrammetric Reconstruction Captured over a Pistachio Orchard (Pistacia vera L.) in Spain




Abstract
1. Summary
2. Data Description
Original Data-UAV RGB Images and GCPs
- Bands: RGB
- Flight height: 55 m above ground level
- Longitudinal and cross overlap: 80%
- Resolution: 20 megapixels
- Image size: 5475 px × 3078 px
- Number of control points: 5
- Coordinate reference system: ETRS89/UTM zone 30 N
- Accuracy of control points in the project: X error (cm): 2.2808; Y error (cm): 2.01787; Z error (cm): 0.284695; Total (cm): 3.05857; Image (pix): 2.090
3. Methods
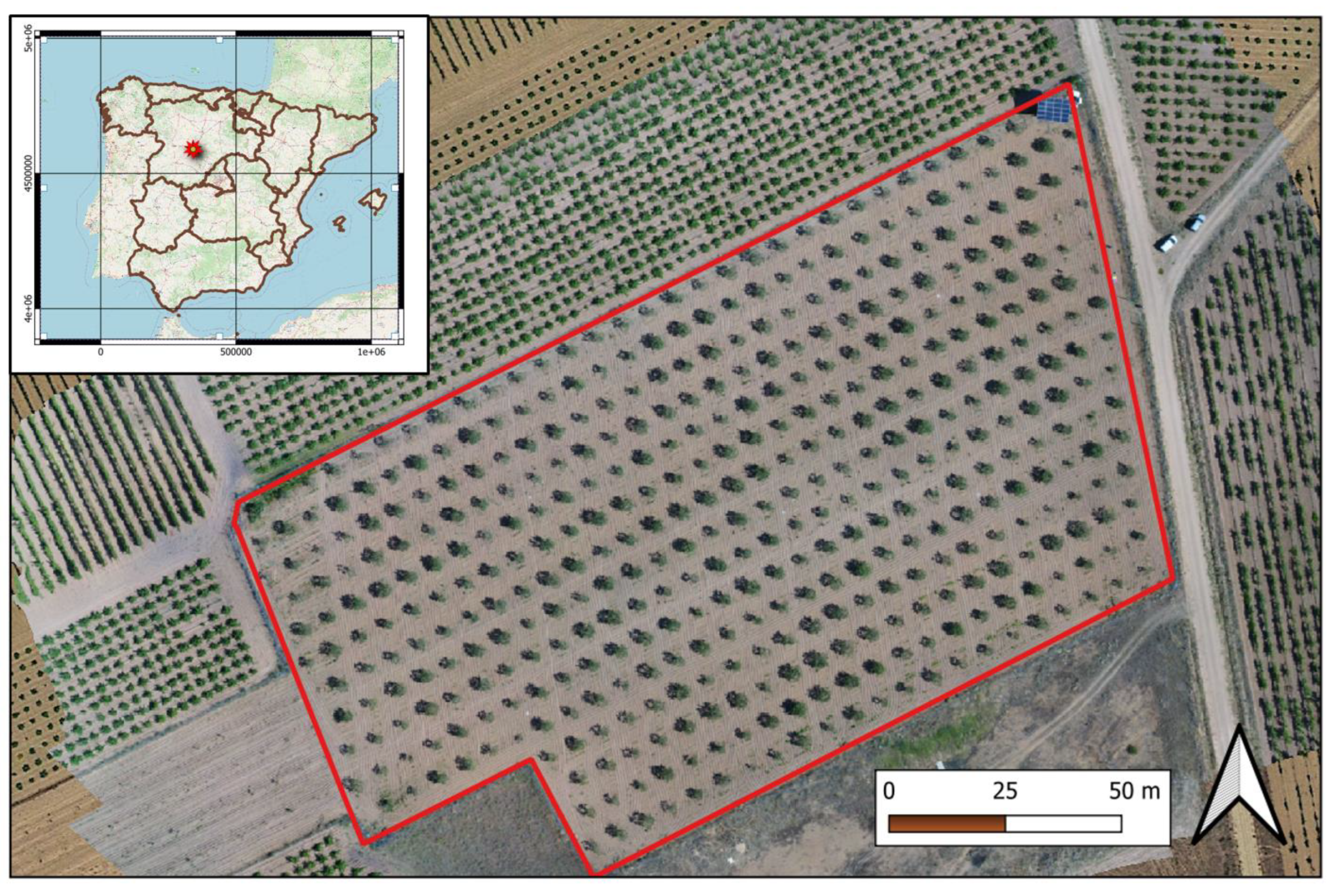
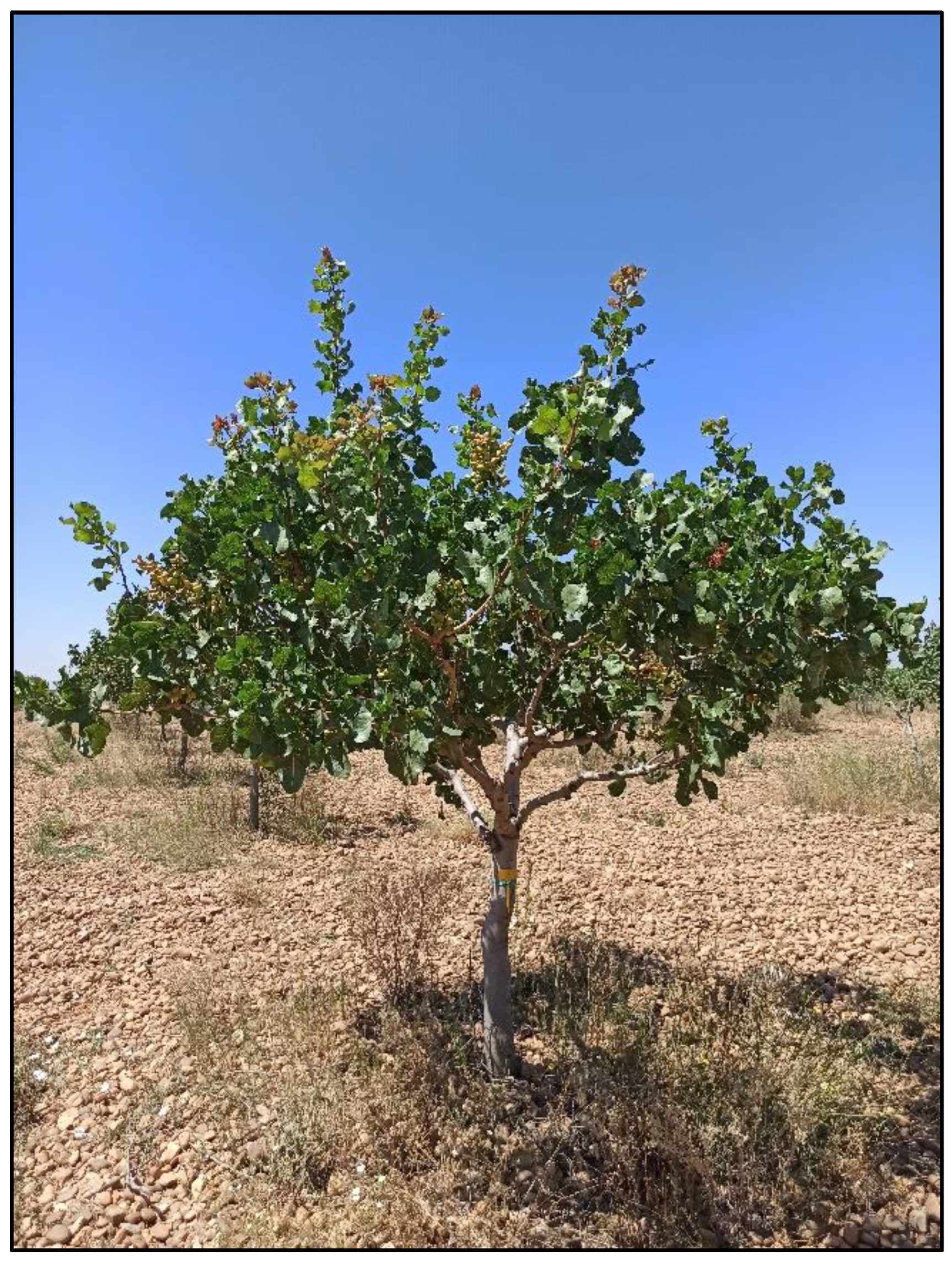
3.1. Experimental Site
3.2. Ground Control Points (GCPs)
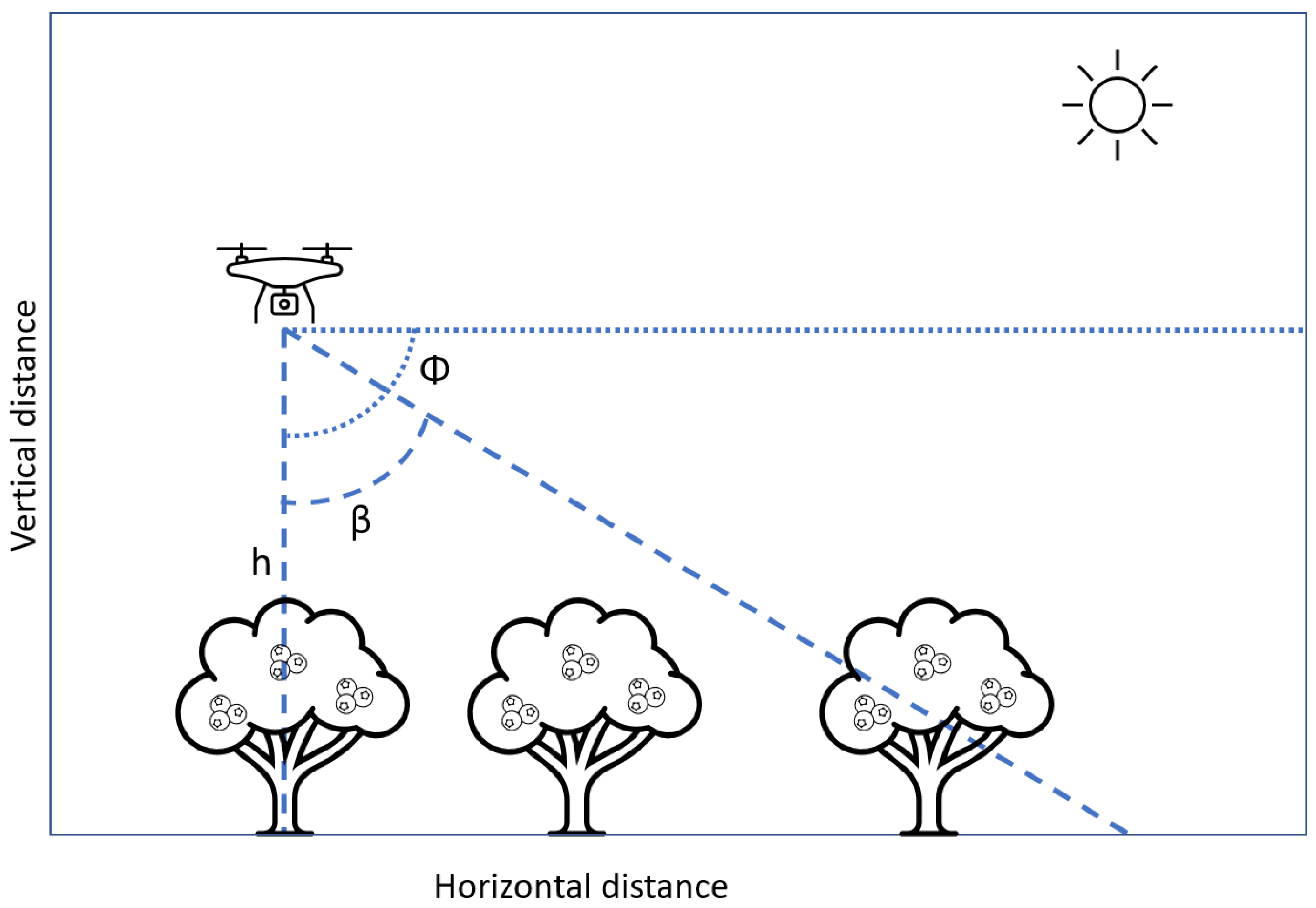
3.3. UAV Platform
3.4. UAV Mission Description
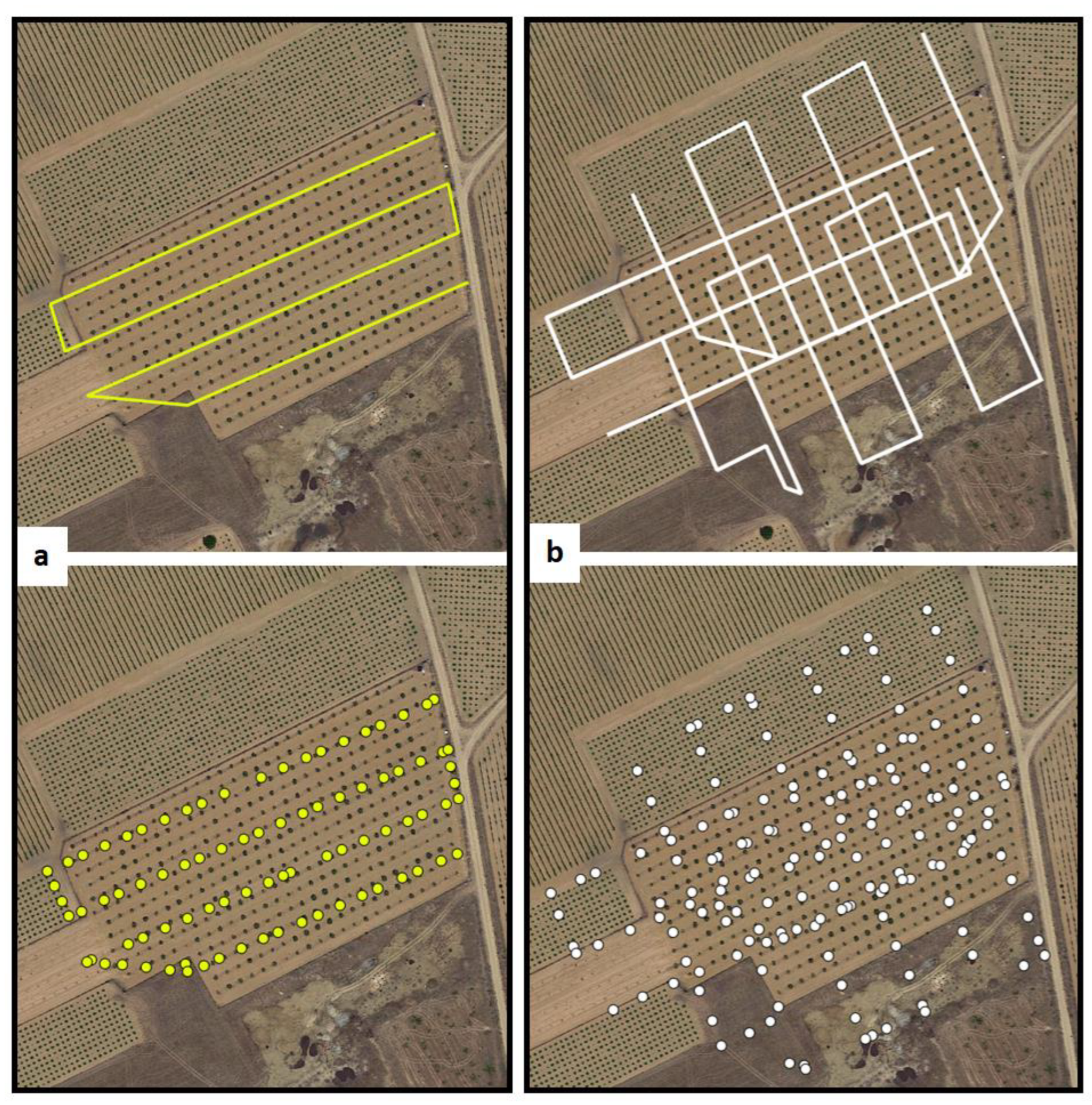
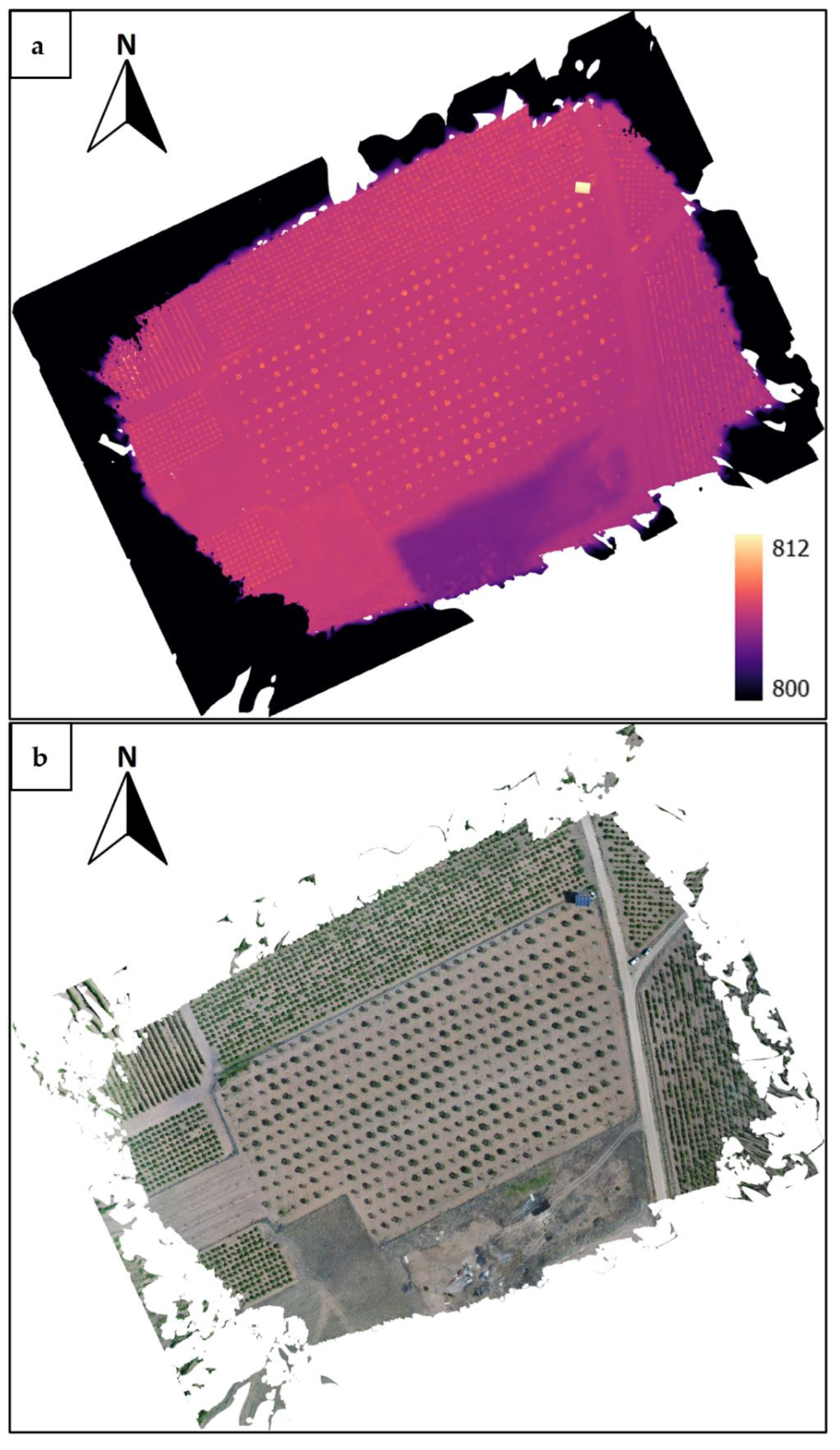
4. Usage Example: 3D Photogrammetric Reconstruction
4.1. Image Processing 3D Point Cloud, DEM and Orthomosaic
4.2. Generated Data
- 3D point cloud:
- ○
- Number of points: 268,979,477
- ○
- Coordinate reference system: ETRS89/UTM zone 30 N
- DEM:
- ○
- Resolution: 1.59 cm/pix
- ○
- Coordinate reference system: ETRS89/UTM zone 30 N
- ○
- Minimum level: 745.1
- ○
- Maximum level: 848.6
- Orthomosaic:
- ○
- Resolution: 1.59 cm/pix
- ○
- Coordinate reference system: ETRS89/UTM zone 30 N
5. Potential Research Applications
- Extracting parameters of agronomic significance such as leaf area, canopy volume, height or other phenotyping traits [19].
- Segmenting the image and studying the effect of ground shadows on the image and their relationship with its agronomic and biophysical parameters [22].
- Testing algorithms or workflows for real-time applications [23].
- Data fusion or combination with freely available open-access satellite images, such as Sentinel or Landsat imagery [24].
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Ethics Statements
References
- Ferguson, L.; Polito, V.; Kallsen, C. The Pistachio Tree; Botany and Physiology and Factors That Affect Yield. In Pistachio Production Manual; University of California: Davis, CA, USA, 2005; pp. 31–39. [Google Scholar]
- Zarco-Tejada, P.; Hubbard, N.; Loudjani, P. Precision Agriculture: An Opportunity for EU Farmers-Potential Support with the CAP 2014–2020; Joint Research Centre (JRC) of the European Commission. Monitoring Agriculture ResourceS (MARS) Unit H04: Brussels, Belgium, 2014; Volume 56. [Google Scholar]
- Bongiovanni, R.; Lowenberg-Deboer, J. Precision Agriculture and Sustainability. Precis. Agric. 2004, 5, 359–387. [Google Scholar] [CrossRef]
- Ammoniaci, M.; Kartsiotis, S.-P.; Perria, R.; Storchi, P. State of the Art of Monitoring Technologies and Data Processing for Precision Viticulture. Agriculture 2021, 11, 201. [Google Scholar] [CrossRef]
- Krishna, K.R. Push Button Agriculture: Robotics, Drones, Satellite-Guided Soil and Crop Management; AAP, Apple Academic Press: Oakville, ON, Canada, 2016; ISBN 978-1-77188-305-4. [Google Scholar]
- Nex, F.; Remondino, F. UAV for 3D Mapping Applications: A Review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A Review on UAV-Based Applications for Precision Agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Ozdogan, M.; Woodcock, C.E. Resolution Dependent Errors in Remote Sensing of Cultivated Areas. Remote Sens. Environ. 2006, 103, 203–217. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned Aerial Systems for Photogrammetry and Remote Sensing: A Review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Li, M.; Shamshiri, R.R.; Schirrmann, M.; Weltzien, C.; Shafian, S.; Laursen, M.S. UAV Oblique Imagery with an Adaptive Micro-Terrain Model for Estimation of Leaf Area Index and Height of Maize Canopy from 3D Point Clouds. Remote Sens. 2022, 14, 585. [Google Scholar] [CrossRef]
- España en Cifras; Instituto Nacional de Estadística: Madrid, Spain, 2018.
- Santesteban, L.G. Precision Viticulture and Advanced Analytics. A Short Review. Food Chem. 2019, 279, 58–62. [Google Scholar] [CrossRef]
- DJI Phantom 4 Advanced Manual. Available online: https://www.dji.com/nl/downloads/products/phantom-4-adv (accessed on 20 October 2022).
- SanDisk Extreme® MicroSDXCTM UHS-I CARD Product Specifications. Available online: https://www.westerndigital.com/products/memory-cards/sandisk-extreme-uhs-i-microsd#SDSQXAA-128G-AN6MA (accessed on 20 October 2022).
- Elkhrachy, I. 3D Structure from 2D Dimensional Images Using Structure from Motion Algorithms. Sustainability 2022, 14, 5399. [Google Scholar] [CrossRef]
- de Castro, A.; Jiménez-Brenes, F.; Torres-Sánchez, J.; Peña, J.; Borra-Serrano, I.; López-Granados, F. 3-D Characterization of Vineyards Using a Novel UAV Imagery-Based OBIA Procedure for Precision Viticulture Applications. Remote Sens. 2018, 10, 584. [Google Scholar] [CrossRef]
- López-Granados, F.; Torres-Sánchez, J.; Jiménez-Brenes, F.M.; Arquero, O.; Lovera, M.; de Castro, A.I. An Efficient RGB-UAV-Based Platform for Field Almond Tree Phenotyping: 3-D Architecture and Flowering Traits. Plant Methods 2019, 15, 160. [Google Scholar] [CrossRef]
- Franklin, S.E. Pixel- and Object-Based Multispectral Classification of Forest Tree Species from Small Unmanned Aerial Vehicles. J. Unmanned Veh. Syst. 2018, 6, 195–211. [Google Scholar] [CrossRef]
- Nasiri, V.; Darvishsefat, A.A.; Arefi, H.; Pierrot-Deseilligny, M.; Namiranian, M.; Le Bris, A. Unmanned Aerial Vehicles (UAV)-Based Canopy Height Modeling under Leaf-on and Leaf-off Conditions for Determining Tree Height and Crown Diameter (Case Study: Hyrcanian Mixed Forest). Can. J. For. Res. 2021, 51, 962–971. [Google Scholar] [CrossRef]
- Yeom, J.; Jung, J.; Chang, A.; Ashapure, A.; Maeda, M.; Maeda, A.; Landivar, J. Comparison of Vegetation Indices Derived from UAV Data for Differentiation of Tillage Effects in Agriculture. Remote Sens. 2019, 11, 1548. [Google Scholar] [CrossRef]
- Feng, H.; Tao, H.; Li, Z.; Yang, G.; Zhao, C. Comparison of UAV RGB Imagery and Hyperspectral Remote-Sensing Data for Monitoring Winter Wheat Growth. Remote Sens. 2022, 14, 3811. [Google Scholar] [CrossRef]
- Vélez, S.; Poblete-Echeverría, C.; Rubio, J.A.; Vacas, R.; Barajas, E. Estimation of Leaf Area Index in Vineyards by Analysing Projected Shadows Using UAV Imagery. OENO One 2021, 55, 159–180. [Google Scholar] [CrossRef]
- Saddik, A.; Latif, R.; El Ouardi, A.; Alghamdi, M.; Elhoseny, M. Improving Sustainable Vegetation Indices Processing on Low-Cost Architectures. Sustainability 2022, 14, 2521. [Google Scholar] [CrossRef]
- Alvarez-Vanhard, E.; Corpetti, T.; Houet, T. UAV & Satellite Synergies for Optical Remote Sensing Applications: A Literature Review. Sci. Remote Sens. 2021, 3, 100019. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| File Name | Format | Files | Size | Description |
|---|---|---|---|---|
| images_nadir_RGB.zip | JPG | 86 | 630.3 MB | Original RGB images |
| images_oblique_RGB.zip | JPG | 162 | 1.2 GB | Original RGB images |
| 3DpointcloudLAS.zip | LAS | 1 | 4 GB | Processed 3D dense cloud |
| 3DpointcloudLAZ.zip | LAZ | 1 | 3.6 GB | Processed 3D dense cloud |
| 3DpointcloudOBJ.zip | OBJ | 1 | 6.4 GB | Processed 3D dense cloud |
| 3DpointcloudPLY.zip | PLY | 1 | 4.6 GB | Processed 3D dense cloud |
| DEM.zip | TIF | 1 | 987.8 MB | Digital Elevation Model |
| orthomosaic.zip | TIF | 1 | 786.8 MB | Processed orthomosaic |
| GCPs.zip | CSV | 1 | 391 Bytes | Ground Control Points |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vélez, S.; Vacas, R.; Martín, H.; Ruano-Rosa, D.; Álvarez, S. High-Resolution UAV RGB Imagery Dataset for Precision Agriculture and 3D Photogrammetric Reconstruction Captured over a Pistachio Orchard (Pistacia vera L.) in Spain. Data 2022, 7, 157. https://doi.org/10.3390/data7110157
Vélez S, Vacas R, Martín H, Ruano-Rosa D, Álvarez S. High-Resolution UAV RGB Imagery Dataset for Precision Agriculture and 3D Photogrammetric Reconstruction Captured over a Pistachio Orchard (Pistacia vera L.) in Spain. Data. 2022; 7(11):157. https://doi.org/10.3390/data7110157
Chicago/Turabian StyleVélez, Sergio, Rubén Vacas, Hugo Martín, David Ruano-Rosa, and Sara Álvarez. 2022. "High-Resolution UAV RGB Imagery Dataset for Precision Agriculture and 3D Photogrammetric Reconstruction Captured over a Pistachio Orchard (Pistacia vera L.) in Spain" Data 7, no. 11: 157. https://doi.org/10.3390/data7110157
APA StyleVélez, S., Vacas, R., Martín, H., Ruano-Rosa, D., & Álvarez, S. (2022). High-Resolution UAV RGB Imagery Dataset for Precision Agriculture and 3D Photogrammetric Reconstruction Captured over a Pistachio Orchard (Pistacia vera L.) in Spain. Data, 7(11), 157. https://doi.org/10.3390/data7110157