
Evaluating the Benefits of Flood Warnings in the Management of an Urban Flood-Prone Polder Area



Abstract
:1. Introduction
2. Materials and Methods
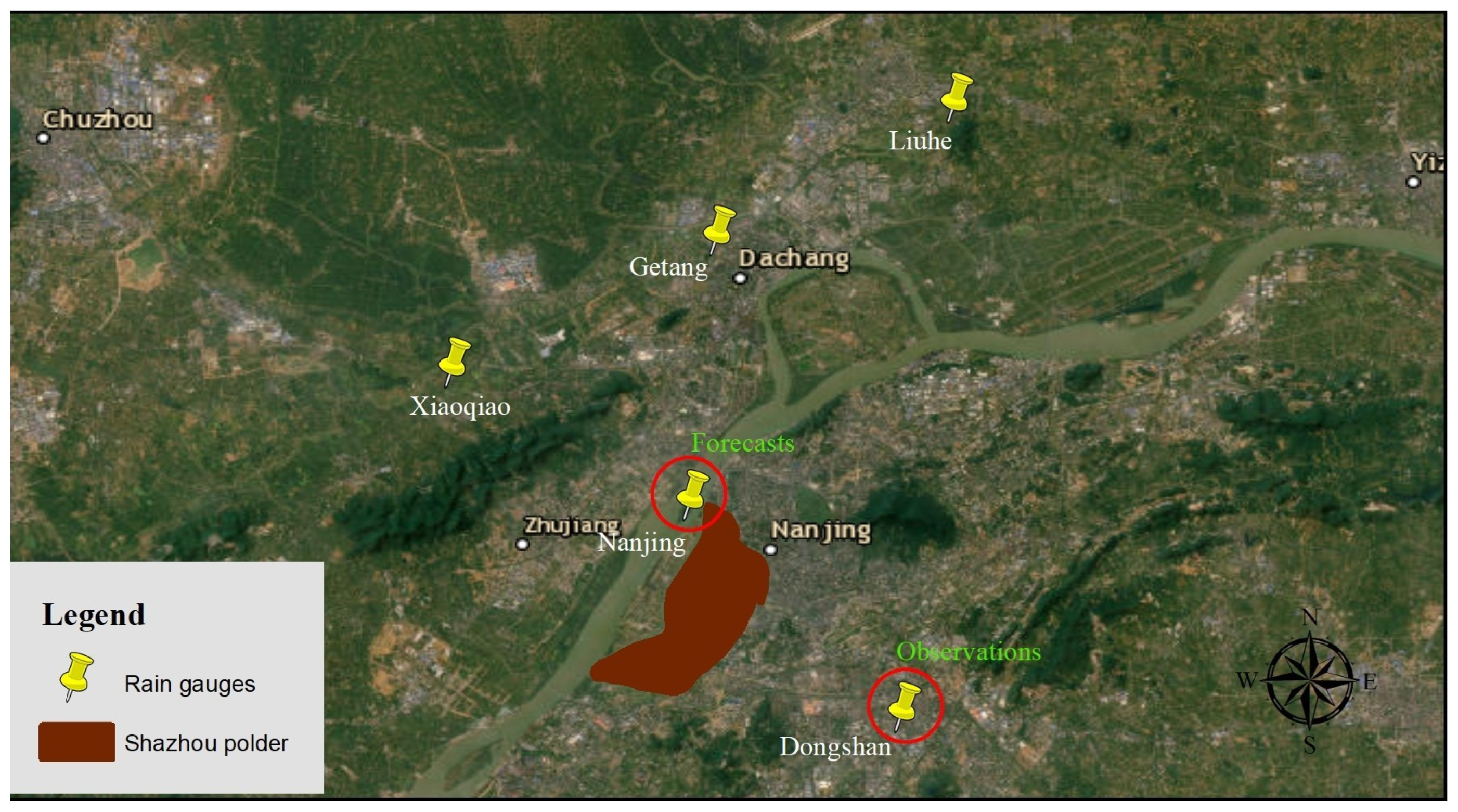
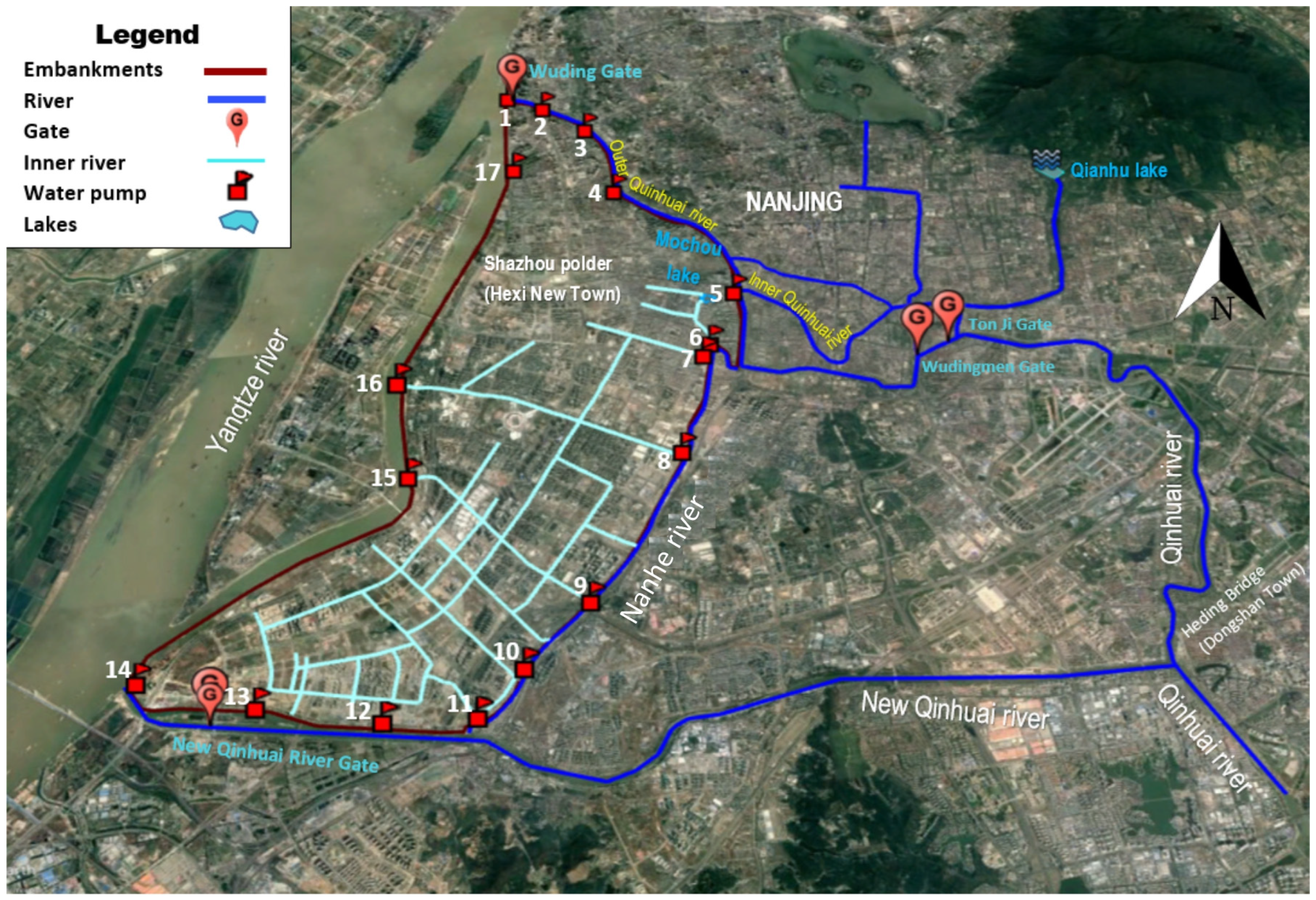
2.1. Study Area
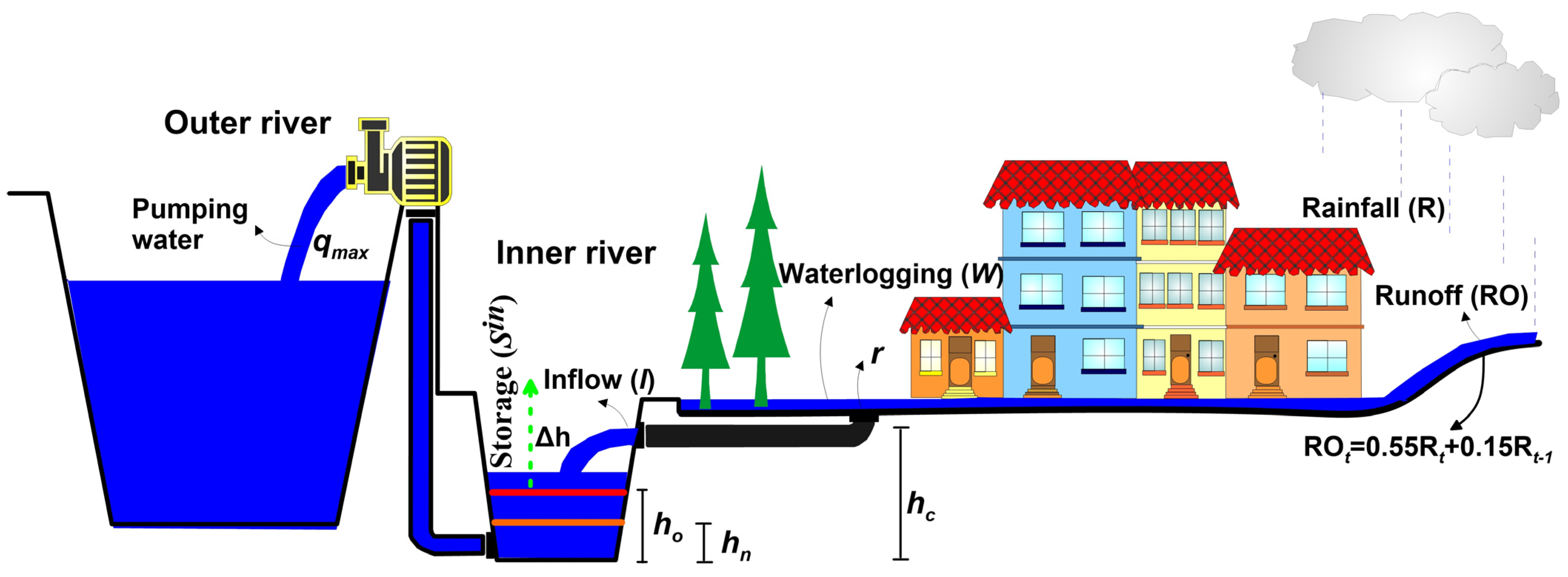
2.2. Conceptual Model of Water Fluxes in the Shazhou Polder System during A Storm Event
2.2.1. Model Structure
2.2.2. Model Calibration Procedure
2.3. General Description of the MC Framework
2.4. The Rainstorm-and-Forecast Generator (RFG)
2.5. The Flood Warning Decision Component (FWDC)
2.5.1. The Rainfall Threshold (RT) Curve for the Polder System
- Step 1: From the RainSim simulations, define a set of observed daily rainfalls that could potentially produce significant runoff events in the polder system (daily rainfalls >50 mm, which is defined as extreme rainfall in China [25]).
- Step 2: Define different initial conditions aswhere is the initial condition (i.e., the water level of the inner rivers before the storm arrives); is the number of initial conditions considered; is the normal level; and is the difference between the critical water level and the normal water level .
- Step 3: For each , perform the following sub-steps:
- ○
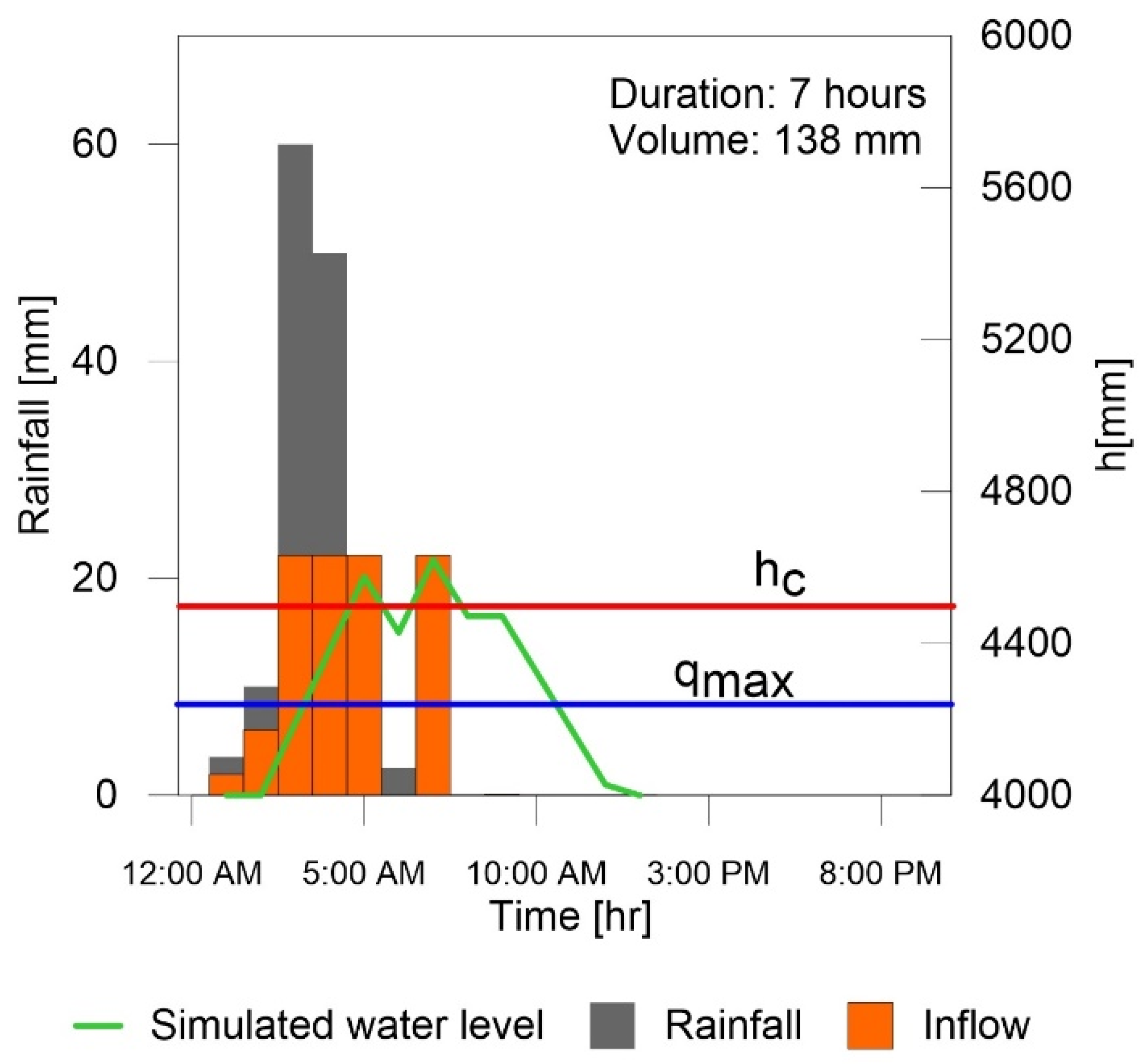
- By using the conceptual model of the polder system with the (reactive) pumping strategy that approximates the current pump operation in the Shazou polder (Appendix A), obtain values of by rescaling all the values in the set of daily rainfalls obtained in Step 1 to make them larger or smaller until the resulting water level of the inner rivers hits the critical level .
- ○
- Define the PDF of , i.e., , with the set of values obtained in the prior sub-step.
- ○
- Define the rainfall threshold associated with , i.e., , as the p-probability quantiles of .
2.6. The Response and Impact Component (RIC)
3. Results
3.1. Calibration of the Polder Model Used in the MC Framework
3.2. Calibration of RainSim Spatio-Temporal Rainfall Field Model
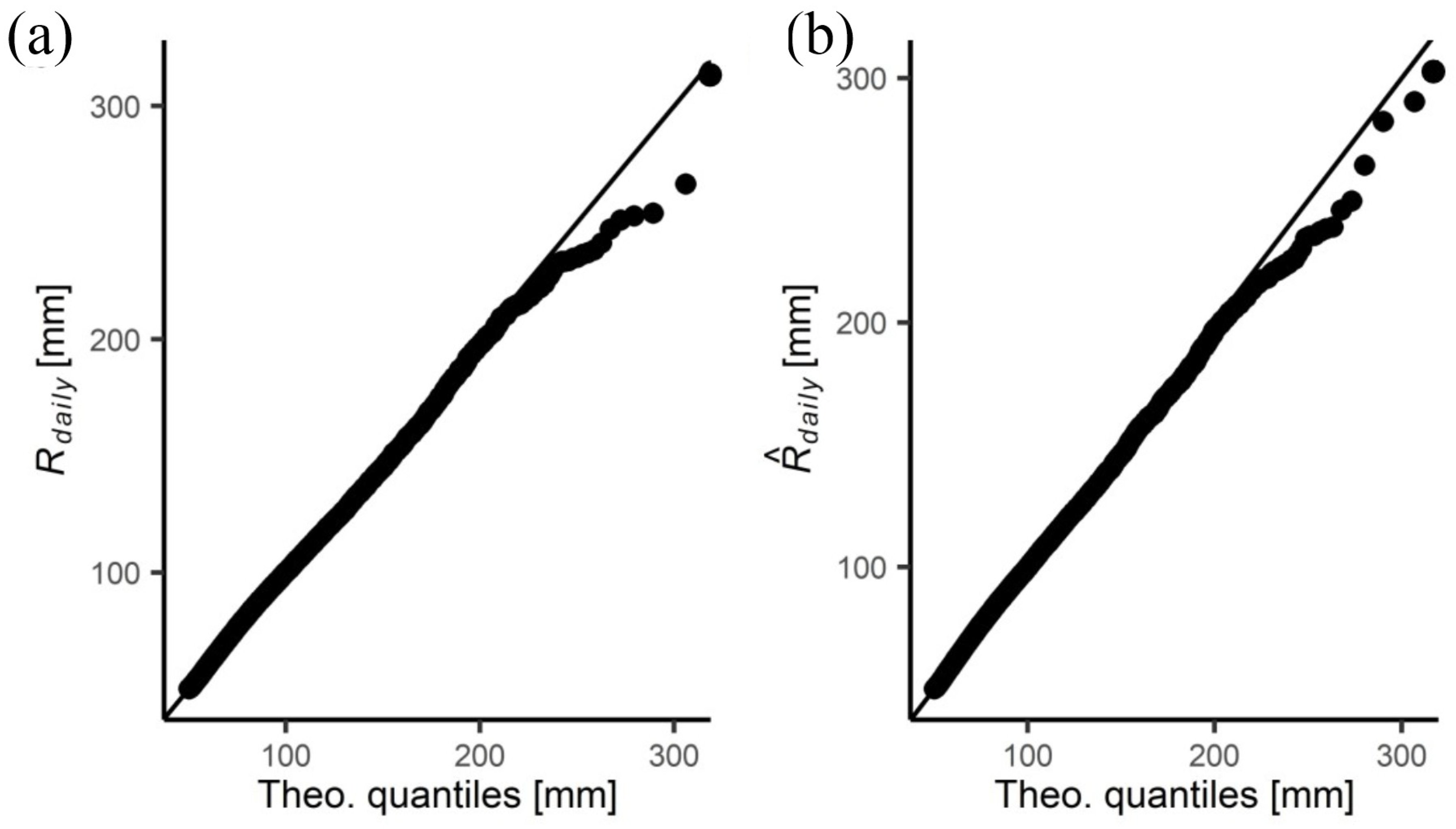
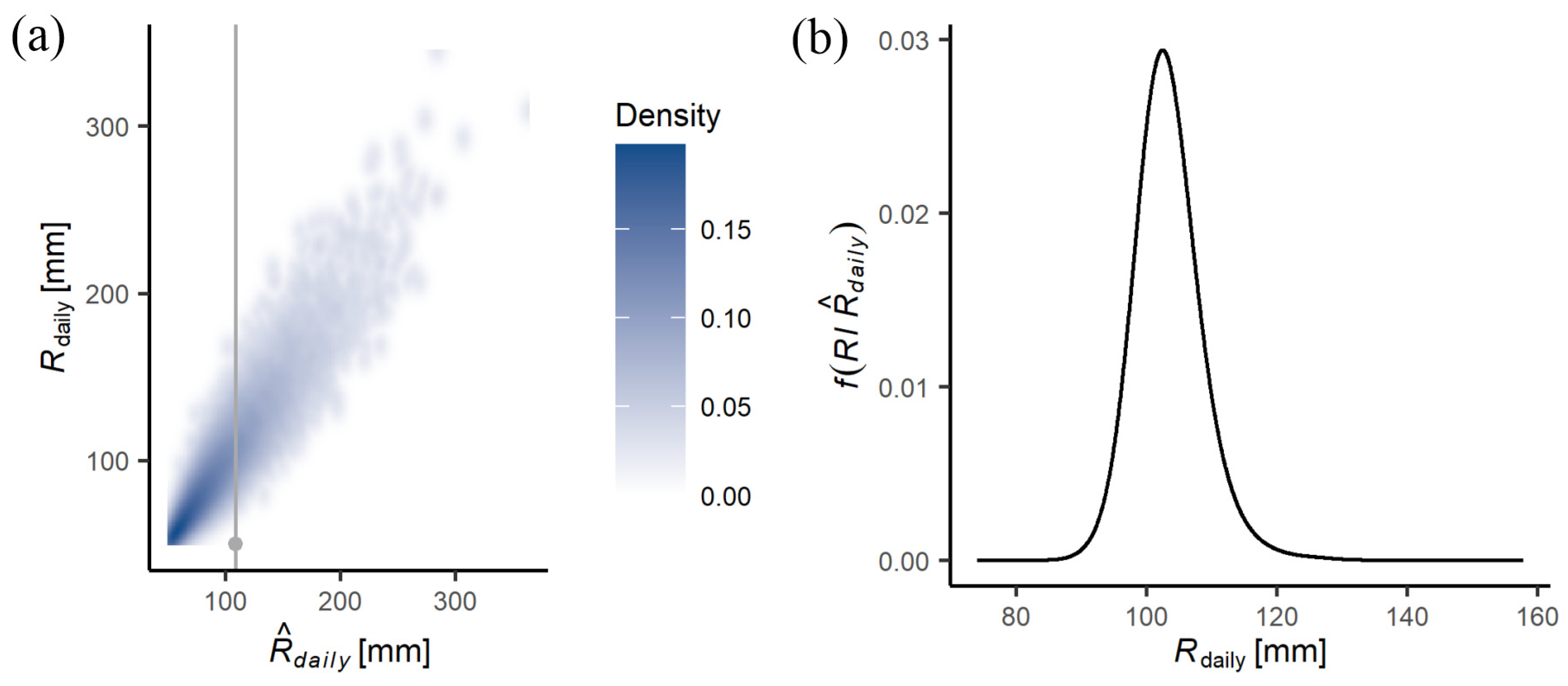
3.3. Joint Distribution of the Daily Rainfall and Its Forecasts Used in the RFG
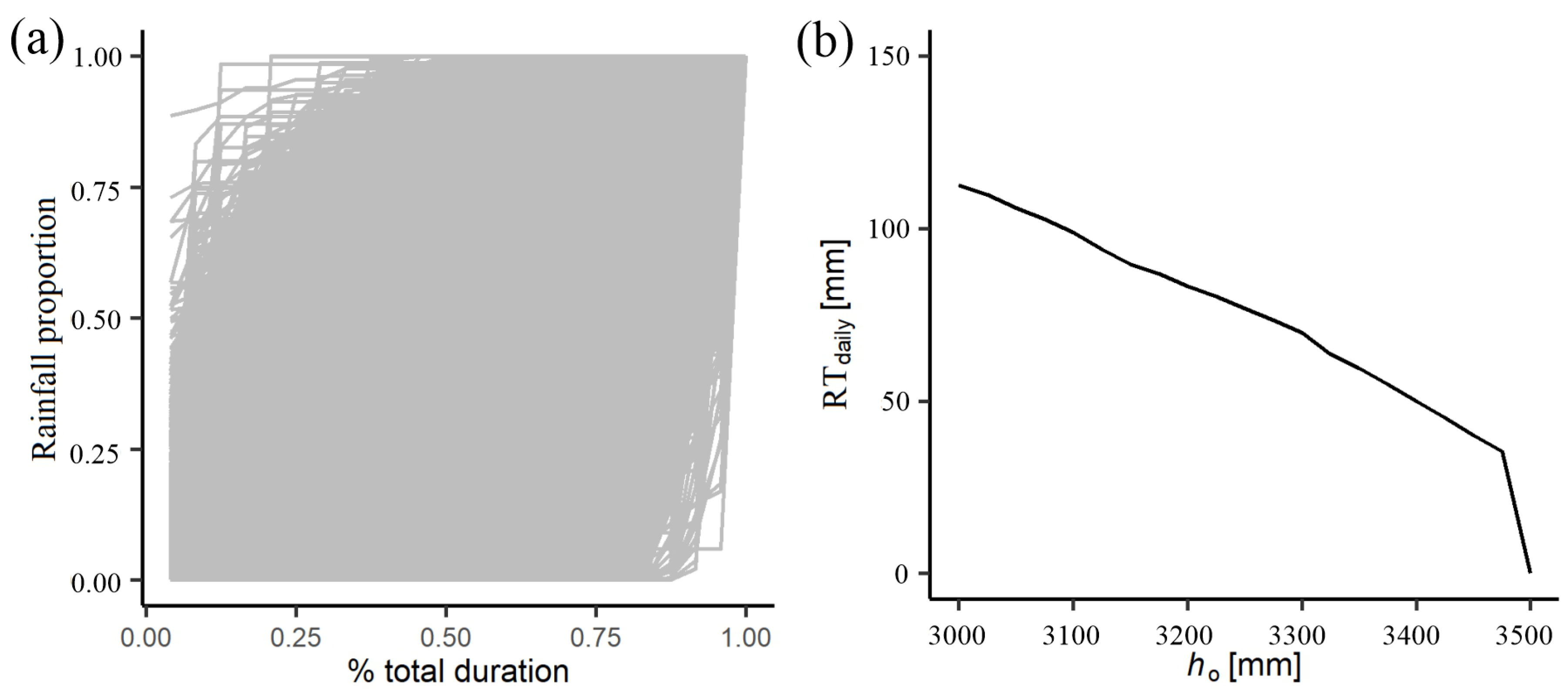
3.4. Rainfall Thresholds for the Shazhou Polder Used in the FWDC
3.5. Application of the MC Framework
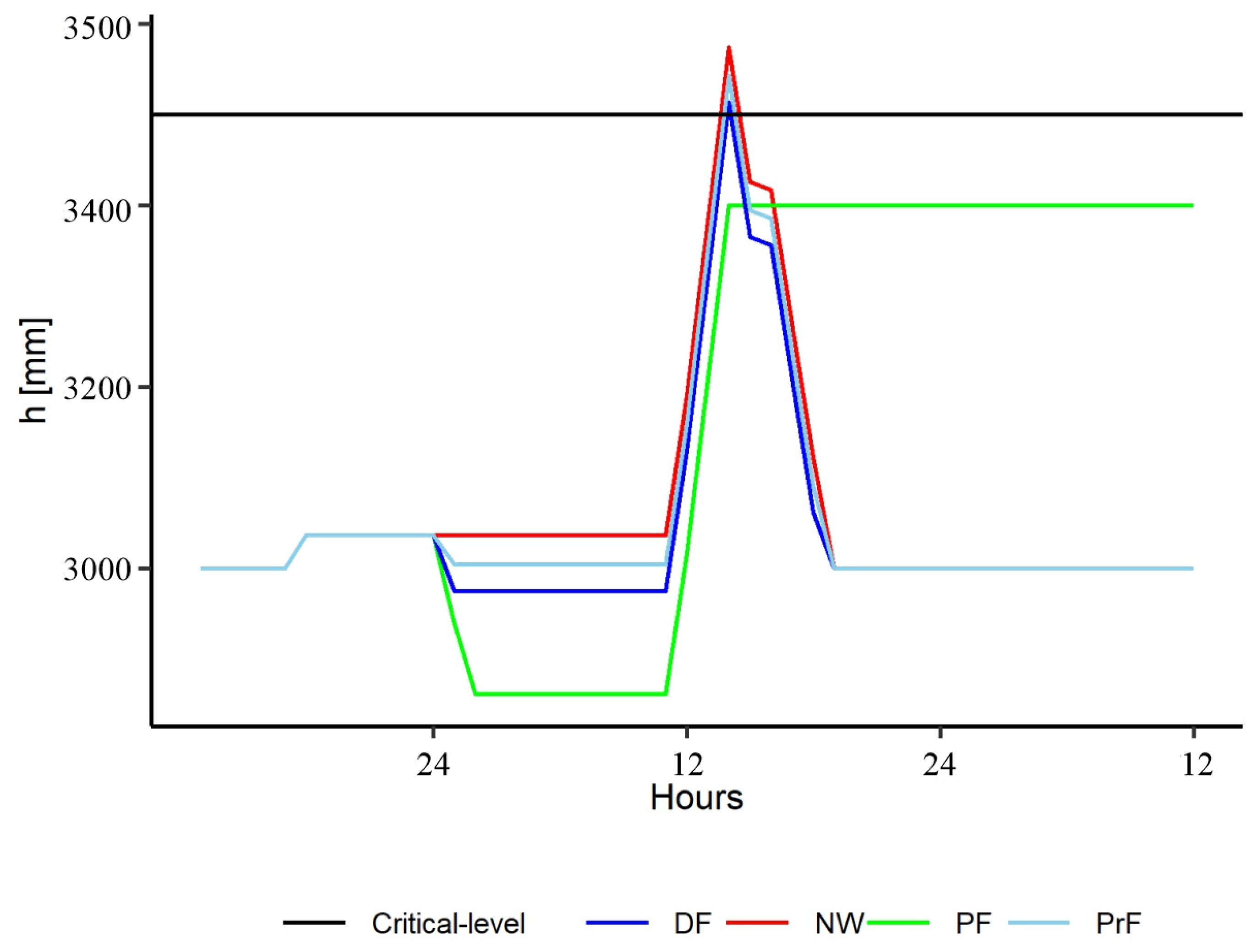
3.5.1. Simulation of Scenarios for A Single Storm
- Under the no-warning scenario (NW), reactive pumping was implemented as described in Section 2.6.
- Under the perfect forecast scenario (PF), the water level is dropped through proactive pumping before the storm arrives (Section 2.6), and the maximum water level matches with that is here assumed to be 3400 mm.
- Under the deterministic forecast scenario (DF), a value of α = 0.05 was adopted. As can be seen for this storm (Figure 10), a warning was issued, and the value adopted for α is not large enough to avoid the critical condition. Therefore, after the critical condition situation, the water level is dropped to the normal water level (3000 mm) using a pumping rate equal to .
- Under the probabilistic forecast scenario (PrF), a value of PT = 0.9 (probabilistic threshold) was used, and a warning was issued. For proactive pumping, a value = 0.025 was adopted, and as can be seen (Figure 10), this is not large enough to avoid the critical condition. Therefore, after the critical condition situation, the water level is dropped to the normal water level (3000 mm) with a pumping rate equal to .
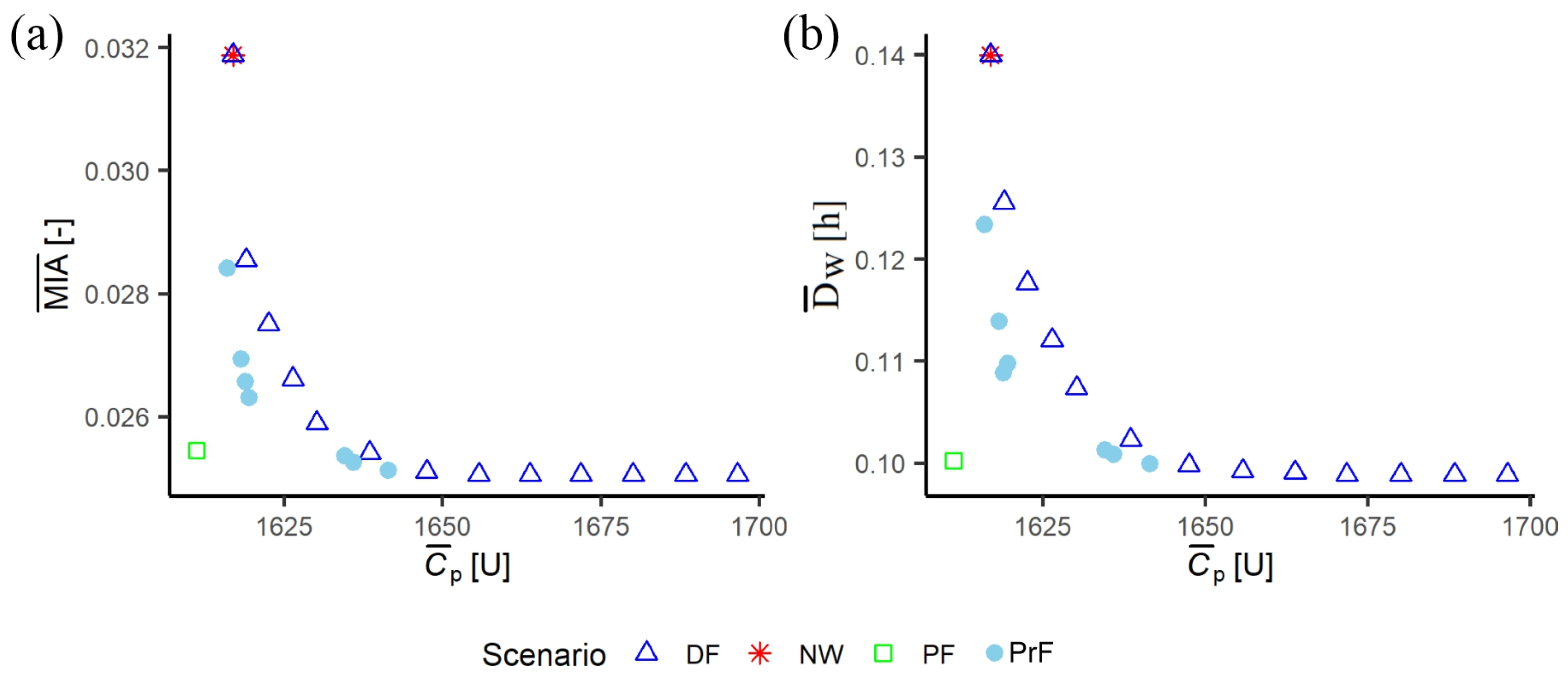
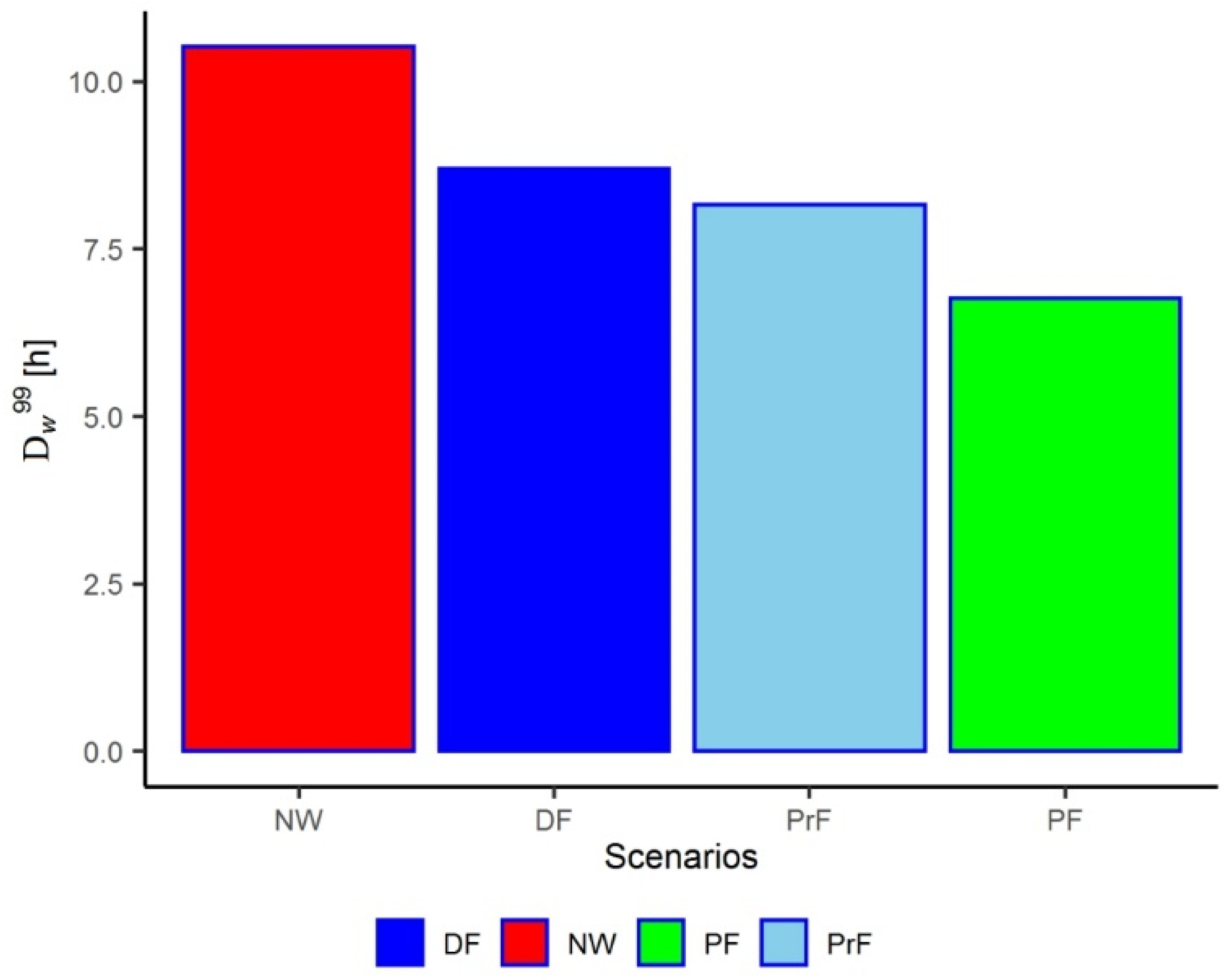
3.5.2. Simulation Experiments
4. Discussion and Conclusions
- (i)
- A flexible MC framework has been created that can simulate a fully integrated flood warning–response–impact system for the operation of a polder in real-time. The MC framework can serve as a test-bed for assessing the accuracy of forecasts needed to achieve desired operational performance.
- (ii)
- The simulation experiments with the integrated system have shown the potential benefits that can be derived from rainfall forecasts and threshold-based warnings in polder operation.
- (iii)
- Probabilistic rainfall forecasts are shown to outperform deterministic rainfall forecasts based on the selected metrics of polder operation.
- (iv)
- A Pareto curve has been generated that shows the trade-off between flooding metrics, such as inundated area or duration, and pumping costs, allowing a polder manager to choose an operating strategy that meets a stated objective.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Conceptual Model of the Water Fluxes during a Storm in a Polder System
Appendix A.1.1. Runoff
Appendix A.1.2. Waterlogging
Appendix A.1.3. Inflow
Appendix A.1.4. Pumping Strategy
Appendix A.1.5. Storage in the Inner Rivers
Appendix A.1.6. The Water Level in the Inner Rivers
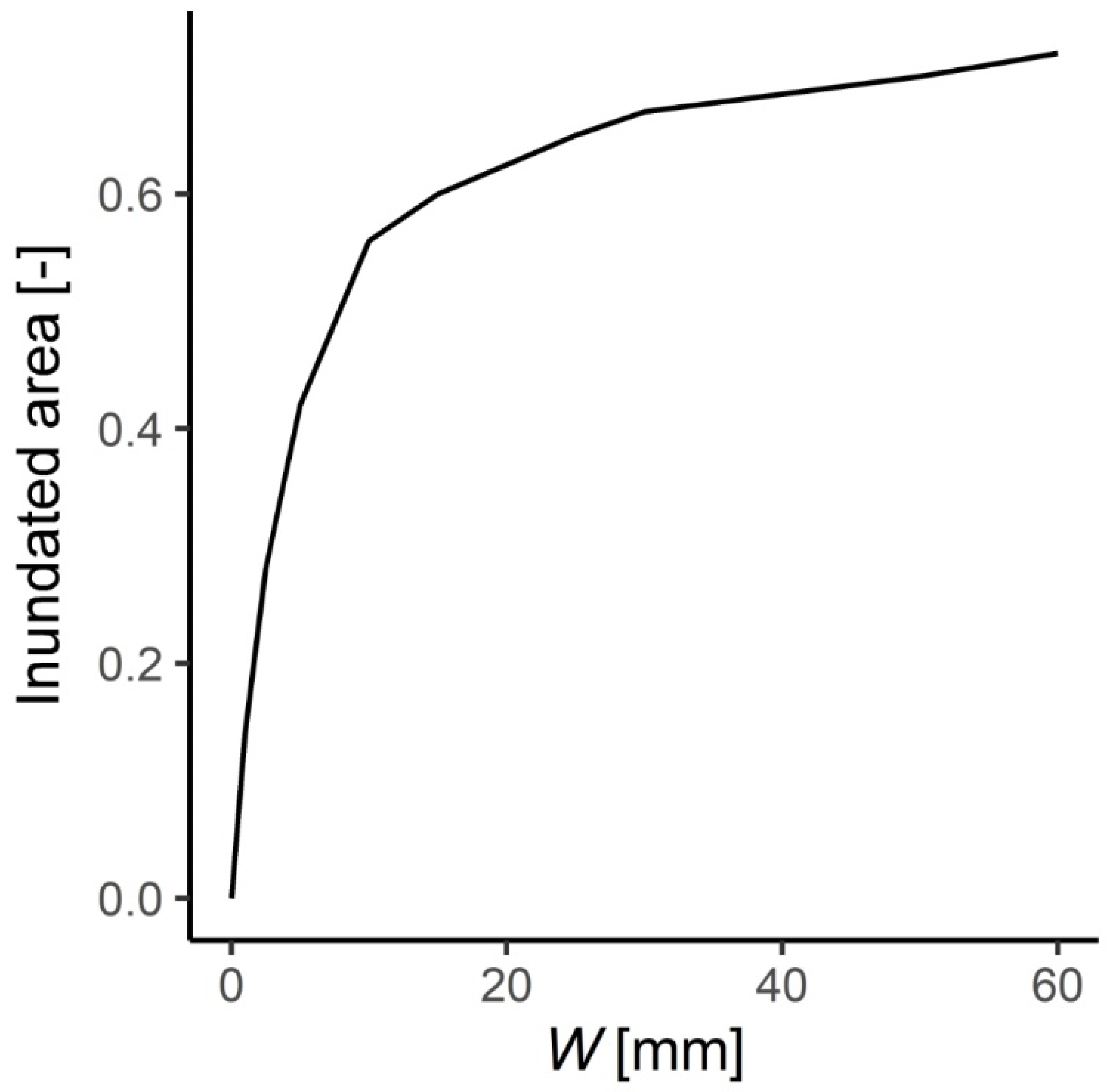
Appendix A.1.7. Inundated Area
Appendix B
Appendix B.1. Spatio-Temporal RainSim Rainfall Field Model and Fitting Procedure
Appendix B.2. Available Data and Chosen Sites for Representing the Observed and Forecast Rainfall

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Code | Name | Lat. | Long. | Record Period |
|---|---|---|---|---|
| 62724050 | Nanjing | 118°43′ | 32°05′ | 1950–2012 (daily) 2012–2016 (hourly) |
| 62935200 | Xiaoqiao | 118°34′ | 32°10′ | 2012–2016 (hourly) |
| 62936600 | Liuhe | 118°53′ | 32°20′ | |
| 62936660 | Getang | 118°44′ | 32°15′ | |
| 63129400 | Dongshan | 118°51′ | 31°57′ |
| Symbol or Abbreviation | Statistic | Units or Time Step | Description | Calibrated Values | ||
|---|---|---|---|---|---|---|
| λ | 1/mean waiting time between adjacent storm origins | (1/h) | Input parameters of the model | 0.003967 | ||
| 1/mean waiting time for raincell origins after storm origin | (1/h) | 0.077682 | ||||
| ղ | 1/mean duration of raincell | (1/h) | 5.381274 | |||
| ξ | 1/mean intensity of a raincell | (h/mm) | 0.169332 | |||
| γ | 1/mean radius of raincells | (1/km) | 0.015000 | |||
| Spatial density of raincell centres | (km−2) | 0.001050 | ||||
| Observed | Fitted | Weight | ||||
| mean | The mean h hour rainfall accumulation | Daily | Statistics needed from daily or hourly rainfall for calibrating and validating the model. | 6.45 | 6.42 | 5 |
| pdyr | The probability that an h hour accumulation is dry, that is strictly less than a specified threshold | Daily Hourly | 0.69 0.91 | 0.81 0.93 | 6 5 | |
| var | The variance of the h hour accumulation | Daily Hourly | 334.95 2.83 | 334.97 2.84 | 2 3 | |
| Lag1corr | The auto-correlation of the h hour accumulation of two-time series. | Daily | 0.16 | 0.30 | 3 | |
| xcorr | The cross-correlation of the h hour accumulation of two-time series. | Daily | 0.90 | 0.96 | 2 | |
| var | The variance of the h hour accumulation | Hourly | ||||
| skew | The skewness coefficient of h hour accumulation | Hourly | 4.86 | 3.88 | 3 | |
Appendix B.3. Calibration of the Model
Appendix C
Appendix C.1. Reactive Pumping Strategy: No Warning Sccenario
If: the inflow exceeds the pumping capacity of the polder system ,pump the water at the latter rate, while the excess water is stored in the inner rivers, raising the water level;Else: pump the water at the inflow rate .
Appendix C.2. Proactive Pumping Strategy: Perfect Forecast Scenario
- Step 1: Assume the polder system to be a tank (an input-output system) and compute the hourly runoff by using Equation (A1), and its associated waterlogging and inflow through Equation (A2) and Equation (A3), respectively, for the no-critical-condition situation.
- Step 2: Compute the hourly water storage as
- Step 3: Compute the maximum value of , i.e., , and compute as
- At midnight, the value of is delivered to the polder manager, and the polder manager conducts the proactive action by pumping a volume of water equal to (Equation (A11)) with a pumping rate = .
- Then, the polder manager waits for the arrival of the storm. If the storm arrives before has been pumped, the manager will continue with the proactive strategy and use the pumping rate until the target volume has been pumped.
- Finally, the polder manager completes the pumping strategy by conducting the reactive action once the storm arrives, which is represented by Equation (A8). The volume of water pumped during the reactive period will be equal to and the level of the inner river at the end of the storm will be equal to .
- Condition 1: When the runoff rate overcomes the capacity of the drainage system .
- Condition 2: When the runoff starts at midnight and the inflow overcomes the pumping capacity of the polder system , i.e., before the proactive strategy can be implemented. Under this condition, in Equation (A10) is zero, and the proactive action cannot be conducted. In this case, the polder manager does not have response capacity for the critical storm, and he/she is only able to use a pumping rate equal to , whereas the water level of the inner rivers rises until a critical condition situation is reached.
Appendix C.3. Proactive Pumping Strategy: Deterministic Forecast Scenario
- A deterministic 24 h forecast of rainfall is generated at midnight, and a warning decision is made based on the deterministic decision rule explained in Section 2.5 (Figure 5b). If a flood warning is issued, the deterministic forecast of the daily runoff that will cause critical conditions in the next 24 h, , is delivered to the polder manager (Equation (A18)). If a flood warning is not issued, only a reactive pumping action is conducted.
- If a flood warning is issued, the polder manager conducts the proactive action by pumping a volume of water equal to with a pumping rate = , where is computed as (Equation (A15)).
- Then, the polder manager waits for the arrival of the storm. If the storm arrives before has been pumped, the manager will continue with the proactive strategy and use the pumping rate until the target volume has been pumped.
- Finally, the polder manager completes the pumping strategy by conducting the reactive action once the storm arrives, which is represented by Equation (A8).
Appendix C.4. Proactive Pumping Strategy: Probaabilistic Forecast Scenario
- A probabilistic 24 h forecast of rainfall is generated at midnight, and a warning decision is conducted based on the probabilistic decision rule explained in Section 2.5 (Figure 5c). If a flood warning is issued, the probabilistic-forecast-based estimate of the daily runoff that will cause critical conditions in the next 24 h is delivered to the polder manager (Equation (A19)). If a flood warning is not issued, only reactive pumping is conducted.
- Then, the chronology (last three steps) is the same as for the deterministic scenario.
References
- Adnan, S.G. The Legacy of Polders: Diagnosing Complex Flooding Processes and Adaptation Options in the Coastal Region of Bangladesh; University of Oxford: Oxford, UK, 2020. [Google Scholar]
- Budiyono, Y.; Marfai, M.A.; Aerts, J.; de Moel, H.; Ward, P.J. Flood Risk in Polder Systems in Jakarta: Present and Future Analyses; Springer International Publishing AG: Cham, Switzerland, 2017; pp. 517–537. [Google Scholar]
- Baan, P.J.A.; Klijn, F. Flood Risk Perception and Implications for Flood Risk Management in the Netherlands. Int. J. River Basin Manag. 2004, 2, 113–122. [Google Scholar] [CrossRef]
- Wei, D.; Urich, C.; Liu, S.; Gu, S. Application of CityDrain3 in Flood Simulation of Sponge Polders: A Case Study of Kunshan, China. Water 2018, 10, 507. [Google Scholar] [CrossRef]
- Gao, C.; Liu, J.; Cui, H.; Doddi, Y. An Applicable Method to Calculate Drainage Modulus in Urbanized Lowlying Area. In Proceedings of the 2008 International Workshop on Education Technology and Training and 2008 International Workshop on Geoscience and Remote Sensing, ETT and GRS 2008, Shanghai, China, 21–22 December 2008. [Google Scholar]
- Gao, Y.; Yuan, Y.; Wang, H.; Schmidt, A.R.; Wang, K.; Ye, L. Examining the Effects of Urban Agglomeration Polders on Flood Events in Qinhuai River Basin, China with HEC-HMS Model. Water Sci. Technol. 2017, 75, 2130–2138. [Google Scholar] [CrossRef] [PubMed]
- Gao, Y.; Wang, D.; Zhang, Z.; Ma, Z.; Guo, Z.; Ye, L. Analysis of Flood Risk of Urban Agglomeration Polders Using Multivariate Copula. Water 2018, 10, 1470. [Google Scholar] [CrossRef]
- Fang, G.; Yuan, Y.; Gao, Y.; Huang, X.; Guo, Y. Assessing the Effects of Urbanization on Flood Events with Urban Agglomeration Polders Type of Flood Control Pattern Using the HEC-HMS Model in the Qinhuai River Basin, China. Water 2018, 10, 1003. [Google Scholar] [CrossRef]
- Wang, Y.-W.; Pendlebury, J.; Nolf, C. The Water Heritage of China: The Polders of Tai Lake Basin as Continuing Landscape. Plan. Perspect. 2023, 38, 949–974. [Google Scholar] [CrossRef]
- Song, M. SWMM Model in Nanjing. In Proceedings of the II-Workshop of the Project “A Virtual Collaboratory for Flood Forecasting, Flood Warning and Decision-making under Uncertainty in Urban Flood Management”, Newcastle upon Tyne, UK, 17–19 June 2019. [Google Scholar]
- Gambini, E.; Ceppi, A.; Ravazzani, G.; Mancini, M.; Valsecchi, I.Q.; Cucchi, A.; Negretti, A.; Tolone, I. An Empirical Rainfall Threshold Approach for the Civil Protection Flood Warning System on the Milan Urban Area. J. Hydrol. 2023, 628, 130513. [Google Scholar] [CrossRef]
- Mentzafou, A.; Papadopoulos, A.; Dimitriou, E. Flood Generating Mechanisms Investigation and Rainfall Threshold Identification for Regional Flood Early Warning. Environ. Earth Sci 2023, 82, 242. [Google Scholar] [CrossRef]
- Georgakakos, K.P. Analytical Results for Operational Flash Flood Guidance. J. Hydrol. 2006, 317, 81–103. [Google Scholar] [CrossRef]
- Young, A.; Bhattacharya, B.; Zevenbergen, C. A Rainfall Threshold-based Approach to Early Warnings in Urban Data-scarce Regions: A Case Study of Pluvial Flooding in Alexandria, Egypt. J. Flood Risk Manag. 2021, 14, e12702. [Google Scholar] [CrossRef]
- Chitwatkulsiri, D.; Miyamoto, H.; Irvine, K.N.; Pilailar, S.; Loc, H.H. Development and Application of a Real-Time Flood Forecasting System (RTFlood System) in a Tropical Urban Area: A Case Study of Ramkhamhaeng Polder, Bangkok, Thailand. Water 2022, 14, 1641. [Google Scholar] [CrossRef]
- Xu, H.; Yang, S.J. Exploring the Evolution of River Networks in Plain Polders of Taihu Lake Basin. Adv. Water Sci. 2013, 3, 366–371. [Google Scholar]
- Gao, C.; Liu, J.; Cui, H.; Hu, J. Treatment of Pump Drainage Boundary in Riverside City. Environ. Earth Sci. 2013, 68, 1435–1442. [Google Scholar] [CrossRef]
- Gao, C.; Liu, J.; Cui, H.; Zhu, J. An Effective Way to Determine Maximum Capacity of Pump Stations for Urbanized Polders. In Proceedings of the 3rd International Conference on Bioinformatics and Biomedical Engineering, iCBBE 2009, Beijing, China, 11–13 June 2009. [Google Scholar]
- Jun, L.; Cheng, G.; Han, C.; Jie, Z.; Gang, L. Research on Relationship between Drainage Modulus and Drainage Area in Large Urbanized Polder. In Proceedings of the 2010 The 2nd International Conference on Industrial Mechatronics and Automation, IEEE, Wuhan, China, 30–31 May 2010; pp. 630–633. [Google Scholar]
- Burton, A.; Kilsby, C.G.; Fowler, H.J.; Cowpertwait, P.S.P.; O’Connell, P.E. RainSim: A Spatial-Temporal Stochastic Rainfall Modelling System. Environ. Model. Softw. 2008, 23, 1356–1369. [Google Scholar] [CrossRef]
- Biondi, D.; Todini, E. Comparing Hydrological Postprocessors Including Ensemble Predictions Into Full Predictive Probability Distribution of Streamflow. Water Resour. Res. 2018, 54, 9860–9882. [Google Scholar] [CrossRef]
- Tanaka, J.S. “How Big Is Big Enough?”: Sample Size and Goodness of Fit in Structural Equation Models with Latent Variables. Child Dev. 1987, 58, 134–146. [Google Scholar] [CrossRef]
- Borga, M.; Anagnostou, E.N.; Blöschl, G.; Creutin, J.-D. Flash Flood Forecasting, Warning and Risk Management: The HYDRATE Project. Environ. Sci. Policy 2011, 14, 834–844. [Google Scholar] [CrossRef]
- Jang, J.-H. An Advanced Method to Apply Multiple Rainfall Thresholds for Urban Flood Warnings. Water 2015, 7, 6056–6078. [Google Scholar] [CrossRef]
- Liu, W.; Wu, J.; Tang, R.; Ye, M.; Yang, J. Daily Precipitation Threshold for Rainstorm and Flood Disaster in the Mainland of China: An Economic Loss Perspective. Sustainability 2020, 12, 407. [Google Scholar] [CrossRef]
- Duque, L.F. A Monte Carlo Simulation Study of the Factors Influencing the Performance of Flood Early Warning Systems; Newcastle University: Newcastle upon Tyne, UK, 2021. [Google Scholar]
- Hapuarachchi, H.A.P.; Wang, Q.J.; Pagano, T.C. A Review of Advances in Flash Flood Forecasting. Hydrol. Process. 2011, 25, 2771–2784. [Google Scholar] [CrossRef]
- Jain, S.K.; Mani, P.; Jain, S.K.; Prakash, P.; Singh, V.P.; Tullos, D.; Kumar, S.; Agarwal, S.P.; Dimri, A.P. A Brief Review of Flood Forecasting Techniques and Their Applications. Int. J. River Basin Manag. 2018, 16, 329–344. [Google Scholar] [CrossRef]
- Krzysztofowicz, R.; Kelly, K.S. Hydrologic Uncertainty Processor for Probabilistic River Stage Forecasting. Water Resour. Res. 2000, 36, 3265–3277. [Google Scholar] [CrossRef]
- Coccia, G.; Todini, E. Recent Developments in Predictive Uncertainty Assessment Based on the Model Conditional Processor Approach. Hydrol. Earth Syst. Sci. 2011, 15, 3253–3274. [Google Scholar] [CrossRef]
- Barbetta, S.; Coccia, G.; Moramarco, T.; Brocca, L.; Todini, E. The Multi Temporal/Multi-Model Approach to Predictive Uncertainty Assessment in Real-Time Flood Forecasting. J. Hydrol. 2017, 551, 555–576. [Google Scholar] [CrossRef]
- Barbetta, S.; Coccia, G.; Moramarco, T.; Todini, E. Real-Time Flood Forecasting Downstream River Confluences Using a Bayesian Approach. J. Hydrol. 2018, 565, 516–523. [Google Scholar] [CrossRef]
- Duque, L.-F.; O’Connell, E.; O’Donnell, G. A Monte Carlo Simulation and Sensitivity Analysis Framework Demonstrating the Advantages of Probabilistic Forecasting over Deterministic Forecasting in Terms of Flood Warning Reliability. J. Hydrol. 2023, 619, 129340. [Google Scholar] [CrossRef]
- Sayers, P.; Horritt, M.; Penning-Rowsell, E.; McKenzie, A. Climate Change Risk Assessment 2017: Projections of Future Flood Risk in the UK; Committee on Climate Change: London, UK, 2015. [Google Scholar]
- Ayzel, G.; Varentsova, N.; Erina, O.; Sokolov, D.; Kurochkina, L.; Moreydo, V. OpenForecast: The First Open-Source Operational Runoff Forecasting System in Russia. Water 2019, 11, 1546. [Google Scholar] [CrossRef]
- Harrigan, S.; Zsoter, E.; Alfieri, L.; Prudhomme, C.; Salamon, P.; Wetterhall, F.; Barnard, C.; Cloke, H.; Pappenberger, F. GloFAS-ERA5 Operational Global River Discharge Reanalysis 1979-Present. Earth Syst. Sci. Data 2020, 12, 2043–2060. [Google Scholar] [CrossRef]
- Arnal, L.; Anspoks, L.; Manson, S.; Neumann, J.; Norton, T.; Stephens, E.; Wolfenden, L.; Cloke, H.L. “Are We Talking Just a Bit of Water out of Bank? Or Is It Armageddon?” Front Line Perspectives on Transitioning to Probabilistic Fluvial Flood Forecasts in England. Geosci. Commun. 2020, 3, 203–232. [Google Scholar] [CrossRef]
- Ramos, M.-H.; Mathevet, T.; Thielen, J.; Pappenberger, F. Communicating Uncertainty in Hydro-Meteorological Forecasts: Mission Impossible? Meteorol. Appl. 2010, 17, 223–235. [Google Scholar] [CrossRef]
- Menne, M.J.; Durre, I.; Vose, R.S.; Gleason, B.E.; Houston, T.G. An Overview of the Global Historical Climatology Network-Daily Database. J. Atmos. Ocean. Technol. 2012, 29, 897–910. [Google Scholar] [CrossRef]




| Parameter | Description | Unit |
|---|---|---|
| The capacity of the pipe-network drainage | mm·hr−1 | |
| The maximum pumping capacity for the polder | ||
| and , respectively | mm | |
| Water surface ratio | - | |
| Average runoff coefficient |
| Metric | Equation | Description of Equations | |||||
| Average maximum inundated area | of the operation of the polder system during July. : hourly inundated area. : the total number of simulated hours in a simulated July (744 h). : total number of July replications (8730 replications). : the average maximum inundated area in July. : . : average waterlogging duration during July. : average total pumping cost during July. : average proactive pumping costs during July. : average reactive pumping costs during July. : total proactive pumping cost for a simulated July . : total reactive pumping cost for a simulated July . | ||||||
| Average waterlogging duration | |||||||
| Average pumping costs | |||||||
| Assumed pumping tariff to compute the pumping costs | |||||||
| (mm·h−1) | 1.6 | 3.2 | 4.8 | 6.4 | 8 | = 9.62 | |
| Tariff (units) | 15 | 30 | 45 | 60 | 75 | 100 | |
| Symbol | Units | Value |
|---|---|---|
| mm·hr−1 | 22.14 | |
| 9.62 (14.8) | ||
| mm | 500 | |
| - | 0.065 | |
| 0.70 |
| Location Parameter (mm) | Shape Parameter (-) | Scale Parameter (-) | Correlation Coefficient | |||
|---|---|---|---|---|---|---|
| 50 | 50 | 1.45 | 1.44 | 23.2 | 23.3 | 0.93 |
| Symbol | Description | Value | Component |
|---|---|---|---|
| Parameters of the joint distribution of the daily rainfall and its forecast. | 50 mm | RFG | |
| 1.44 | |||
| 23.3 | |||
| 50 mm | |||
| 1.45 | |||
| 23.2 | |||
| 0.93 | |||
| PT | Probabilistic threshold adopted for the probabilistic decision rule. | 0.1–1 | FWDC |
| Parameters of the conceptual model | 22.14 mm·hr−1 | RIC | |
| 9.62 mm·hr−1 | |||
| 500 mm | |||
| 0.065 | |||
| 0.70 | |||
| Water level assumed at the end of the perfect forecast-based proactive pumping strategy | 4400 mm | ||
| α | Proactive pumping factor (the proportion of the forecasted runoff pumped in advance) | 0–0.5 |
| Set | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| α | 0.05 | 0.15 | 0.075 | 0.1 | 0.3 | 0.2 | 0.25 |
| PT | 0.9 | 0.9 | 0.8 | 0.8 | 0.8 | 0.7 | 0.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duque, F.; O’Donnell, G.; Liu, Y.; Song, M.; O’Connell, E. Evaluating the Benefits of Flood Warnings in the Management of an Urban Flood-Prone Polder Area. Hydrology 2023, 10, 238. https://doi.org/10.3390/hydrology10120238
Duque F, O’Donnell G, Liu Y, Song M, O’Connell E. Evaluating the Benefits of Flood Warnings in the Management of an Urban Flood-Prone Polder Area. Hydrology. 2023; 10(12):238. https://doi.org/10.3390/hydrology10120238
Chicago/Turabian StyleDuque, Felipe, Greg O’Donnell, Yanli Liu, Mingming Song, and Enda O’Connell. 2023. "Evaluating the Benefits of Flood Warnings in the Management of an Urban Flood-Prone Polder Area" Hydrology 10, no. 12: 238. https://doi.org/10.3390/hydrology10120238
APA StyleDuque, F., O’Donnell, G., Liu, Y., Song, M., & O’Connell, E. (2023). Evaluating the Benefits of Flood Warnings in the Management of an Urban Flood-Prone Polder Area. Hydrology, 10(12), 238. https://doi.org/10.3390/hydrology10120238