

Monte Carlo Simulations as an Alternative for Solving Engineering Problems in Environmental Sciences: Three Case Studies

 , , and
, , and
Abstract
1. Introduction
2. Methodology
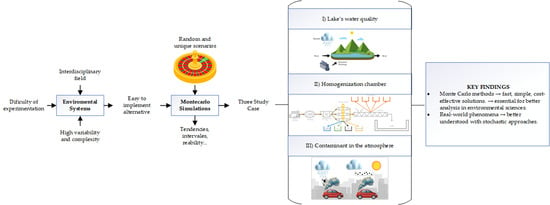
- Case I: A 10 km3 lake receives river water with an average flow of 10 m3/s and a BOD5 concentration of 20 mg/L. The lake volume remains constant, and outflow BOD5 matches the lake’s concentration. An industrial company begins discharging variable-flow, high-organic-load wastewater into the lake, impacting water quality over time.
- Case II: At a Solid Waste Treatment Plant operating from 08:00 to 16:00, garbage is unloaded into a storage pit, which ensures continuous feed to the process. A crane transfers the waste to conveyor belts leading to manual sorting, where recyclables are removed. The remaining waste passes through a screening drum that separates organics for composting, while the rest is sent to a landfill.
- Case III: Downtown air is continuously polluted by particulate matter (PM) from mobile sources. Due to its small size, PM stays suspended for long periods. Rain can help remove PM through washout, but rain droplets may also evaporate upon contact with hot vehicle-emitted particles, reducing this effect.
3. Results and Discussion
3.1. Case Study I: Modeling the Concentration of BOD5 in a Lentic Surface Water Source
3.1.1. Description and Conditions of the Case Study I
3.1.2. Mathematical Model for Case Study I
3.1.3. Solution Algorithm and Simulation for Case Study I
- : Inflow rate → 10 m3/s, variable during rainfall events.
- : Inlet concentration → 50 mg/L, dependent on inflow and dilution.
- : Discharge flow rate → N (0.5, 0.025) m3/s, depending on company activity.
- : Discharge concentration → U (360, 980) mg/L, varying with company activity.
- : Initial BOD5 concentration in the lake → 6.75 mg/L, assumed equilibrium concentration.
- : Outflow rate →
- : Water temperature → The temperature of the lake follows a discrete-time Markov Chain within 15 °C and 25 °C. Transition probabilities were defined using a Gaussian-like decay, favoring small temperature changes, reflecting the thermal inertia of a lake.
3.1.4. Outcomes and Analysis for Case Study I
- SSC Min: Minimum organic load input (high rainfall, low industrial activity, high temperature).
- SSC Max: Maximum organic load input (no rainfall, high industrial activity, low temperature).
- SSC Int: Intermediate conditions (average rainfall, medium industrial activity, average temperature).
3.2. Case Study II: Determination of the Required Capacity for a Homogenization Chamber at a Solid Waste Treatment Center
3.2.1. Description and Conditions of the Case Study II
3.2.2. Mathematical Model for Case Study II
3.2.3. Solution Algorithm and Simulation for Case Study II
- : Truck capacity → 10 m3, 7 m3, or 3 m3. The volume is determined by a random number between 0.00 and 1.00. For values between 0.00 and 0.19, the volume is 10 m3; for values between 0.20 and 0.39, it is 7 m3; and for the remaining values, it is 3 m3.
- : Sorting efficiency → U (5, 10)%, representing the proportion of waste (between 5% and 10%) separated during sorting and sent for recovery.
- : Organic matter content → U (60, 70)%, indicating that between 60% and 70% of the waste passing through sorting consists of organic material.
- : Screening efficiency → U (90, 95)%, which describes the separation of between 90% and 95% of the organic matter present in the incoming waste.
3.2.4. Outcomes and Analysis for Case Study II
3.3. Case Study III: Simulating the Elimination of a Contaminant Particulate Matter from the Atmosphere by Rain
3.3.1. Description and Conditions of the Case Study III
3.3.2. Mathematical Model for Case Study III
- : removal rate coefficient by impaction → 0.6 m3·µg−1·month−1.
- : natural deposition rate coefficient of particulate matter → 0.3 month−1.
- : growth rate of raindrops assumed to be a constant (intensity of rain) → LogN (2, 6) µg·m−3·month−1, variable during rainfall events
- : constant emission rates of particulate matter emitted directly from an external source → N (100, 40) µg·m−3·month−1, depending on vehicular emission rates.
- : natural deposition rate coefficient of the density of raindrops → 0.2 month−1.
- : removal rate coefficient by evaporation → 0.00003 m3·µg−1·month−1.
3.3.3. Solution Algorithm and Simulation for Case Study III
3.3.4. Outcomes and Analysis for Case Study III
- SSC Min: Maximum rainfall density and minimum PM emissions (Q = 60 µg·m−3·month−1, q = 8 µg·m−3·month−1).
- SSC Int: Average rainfall density and average PM emissions (Q = 100 µg·m−3·month−1, q = 2 µg·m−3·month−1).
- SSC Max: No rainfall and highest PM emissions (Q = 140 µg·m−3·month−1; q = 0 µg·m−3·month−1).
- (1)
- Modelling variations of q in each step of the integration time using the LogN distribution.
- (2)
- The effect of climate streaks, such as prolonged periods of drought followed by periods of intense rainfall and so on. This is modelled in increments of 4 units of time. Two different climate streaks were investigated:
- (a)
- A case where the climate starts in a period of intense drought for 4 units of time
- (b)
- A case where the climate starts in a period of heavy rainfall for 4 units of time.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- National Research Council. Grand Challenges in Environmental Sciences; National Academies Press: Washington, DC, USA, 2001; pp. 14–60. [Google Scholar]
- Arroyo, M.T.K.; Cavieres, L.; Marquet, P.; Latorre, C.; Armesto, J.J.; Bozinovic, F.; Gutiérrez, J.R.; Soto, D.; Squeo, F.A. Ciencias Ambientales. Diagnóstico y Mirada Hacia El Futuro. In Análisis y Proyecciones de la Ciencia Chilena 2005; Allende, J.E., Babul, J., Martínez, S., Ureta, T., Eds.; Academia Chilena de la Ciencia: Santiago de Chile, Chile, 2005; pp. 295–331. [Google Scholar]
- Bhatt, D.; Swain, M.; Yadav, D. Artificial Intelligence Based Detection and Control Strategies for River Water Pollution: A Comprehensive Review. J. Contam. Hydrol. 2025, 271, 104541. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.P.; Huang, G.H.; Nie, S.L.; Chen, B.; Qin, X.S. Mathematical Modeling for Resources and Environmental Systems. Math. Probl. Eng. 2013, 2013, 1–4. [Google Scholar] [CrossRef]
- Zeidan, B.A. Mathematical Modeling of Environmental Problems. In Environmental Science and Engineering, Volume 7: Instrumentation, Modelling & Analysis; Yonemura, S., Ed.; Studium Press LLC: Houston, TX, USA, 2015; Volume 7, pp. 422–461. [Google Scholar]
- Visser, M.; Van Eck, N.J.; Waltman, L. Large-Scale Comparison of Bibliographic Data Sources: Scopus, Web of Science, Dimensions, Crossref, and Microsoft Academic. Quant. Sci. Stud. 2021, 2, 20–41. [Google Scholar] [CrossRef]
- Petcu, M.A.; Ionescu-Feleaga, L.; Ionescu, B.-Ș.; Moise, D.-F. A Decade for the Mathematics: Bibliometric Analysis of Mathematical Modeling in Economics, Ecology, and Environment. Mathematics 2023, 11, 365. [Google Scholar] [CrossRef]
- Mbagwu, J.P.; Obidike, B.M.; Chidiebere, C.W.; Enyoh, C.E. Series Solutions of Mathematical Modeling of Environmental Problems. World Sci. News 2021, 160, 91–110. [Google Scholar]
- Khandan, N. Introduction to Modeling. In Modeling Tools for Environmental Engineers and Scientists; CRC Press: Boca Raton, FL, USA, 2001; Volume 94, pp. 3–29. [Google Scholar]
- Gao, Y.; Wang, S.; Zhang, C.; Xing, C.; Tan, W.; Wu, H.; Niu, X.; Liu, C. Assessing the Impact of Urban Form and Urbanization Process on Tropospheric Nitrogen Dioxide Pollution in the Yangtze River Delta, China. Environ. Pollut. 2023, 336, 122436. [Google Scholar] [CrossRef]
- Fan, H.; Liu, C.; Bian, S.; Wang, W.; Rignanese, G.-M.; Xu, H.; Zhao, Y.; Zhao, D.; Duan, Y.; Xu, X. Improvement of Disastrous Extreme Precipitation Forecasting in North China by Pangu-Weather AI-Driven Regional WRF Model. Environ. Res. Lett. 2024, 19, 054051. [Google Scholar]
- Cai, C.; Zhu, L.; Hong, B. A Review of Methods for Modeling Microplastic Transport in the Marine Environments. Mar. Pollut. Bull. 2023, 193, 115136. [Google Scholar] [CrossRef]
- Denk, T.R.A.; Mohn, J.; Decock, C.; Lewicka-Szczebak, D.; Harris, E.; Butterbach-Bahl, K.; Kiese, R.; Wolf, B. The Nitrogen Cycle: A Review of Isotope Effects and Isotope Modeling Approaches. Soil Biol. Biochem. 2017, 105, 121–137. [Google Scholar] [CrossRef]
- Doetterl, S.; Berhe, A.A.; Nadeu, E.; Wang, Z.; Sommer, M.; Fiener, P. Erosion, Deposition and Soil Carbon: A Review of Process-Level Controls, Experimental Tools and Models to Address C Cycling in Dynamic Landscapes. Earth-Sci. Rev. 2016, 154, 102–122. [Google Scholar] [CrossRef]
- Navon, I.M. Data Assimilation for Numerical Weather Prediction: A Review. In Data Assimilation for Atmospheric, Oceanic and Hydrologic Applications; Park, S.K., Xu, L., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 21–65. [Google Scholar]
- Akmaev, R.A. Whole Atmosphere Modeling: Connecting Terrestrial and Space Weather. Rev. Geophys. 2011, 49, 21–65. [Google Scholar] [CrossRef]
- James, I.D. Modelling Pollution Dispersion, the Ecosystem and Water Quality in Coastal Waters: A Review. Environ. Model. Softw. 2002, 17, 363–385. [Google Scholar] [CrossRef]
- Praskievicz, S.; Chang, H. A Review of Hydrological Modelling of Basin-Scale Climate Change and Urban Development Impacts. Prog. Phys. Geogr. 2009, 33, 650–671. [Google Scholar] [CrossRef]
- Witelski, T.; Bowen, M. What Is Mathematical Modelling? In Methods of Mathematical Modelling: Continuous Systems and Differential Equations; Springer Undergraduate Mathematics Series; Springer International Publishing: Cham, Switzerland, 2015; pp. vii–xii. [Google Scholar]
- Vorhölter, K.; Greefrath, G.; Borromeo Ferri, R.; Leiß, D.; Schukajlow, S. Mathematical Modelling. In Intelligent Systems Reference Library; Kacprzyk, J., Jain, L.C., Eds.; Springer: Cham, Switzerland, 2019; Volume 161, pp. 91–114. [Google Scholar]
- Merikoski, J. Data Based Models. In Mathematical Modelling; Pohjolainen, S., Ed.; Springer International Publishing: Cham, Switzerland, 2016; pp. 55–78. [Google Scholar]
- Rasouli Majd, N.; Montaseri, M.; Amirataee, B. Stochastic Evaluation of the Effect of Cross-Correlation between Precipitation and Evapotranspiration on SPEI Performance. J. Hydrol. 2025, 652, 132650. [Google Scholar] [CrossRef]
- Arai, R.; Nishi, Y. Stochastic Marine Ecosystem Modeling for Statistical Interpretation of the Uncertainty Factors Used for the Determination of Tolerable Daily Intake of Polychlorinated Biphenyls. Environ. Pollut. 2025, 367, 125626. [Google Scholar] [CrossRef]
- Rubinstein, R.Y.; Kroese, D.P. Simulation of Discrete-Event Systems. In Simulation and the Monte Carlo Method; Rubinstein, R.Y., Kroese, D.P., Eds.; Wiley Series in Probability and Statistics; Wiley: Hoboken, NJ, USA, 2016; Volume 3, pp. 81–96. [Google Scholar]
- Kroese, D.P.; Brereton, T.; Taimre, T.; Botev, Z.I. Why the Monte Carlo Method Is so Important Today. Wiley Interdiscip. Rev. Comput. Stat. 2014, 6, 386–392. [Google Scholar] [CrossRef]
- Wang, P.; Han, D.; Yu, F.; Wang, Y.; Teng, Y.; Wang, X.; Liu, S. Changing Climate Intensifies Downstream Eutrophication by Enhancing Nitrogen Availability from Tropical Forests. Sci. Total Environ. 2024, 955, 176959. [Google Scholar] [CrossRef]
- Meng, Z.; Wang, L.; Cao, B.; Huang, Z.; Liu, F.; Zhang, J. Indoor Airborne Phthalates in University Campuses and Exposure Assessment. Build. Environ. 2020, 180, 107002. [Google Scholar] [CrossRef]
- Xu, T.; Zhang, C.; Liu, C.; Hu, Q. Variability of PM2.5 and O3 Concentrations and Their Driving Forces over Chinese Megacities during 2018–2020. J. Environ. Sci. 2023, 124, 107002. [Google Scholar] [CrossRef]
- Shukla, J.B.; Misra, A.K.; Sundar, S.; Naresh, R. Effect of Rain on Removal of a Gaseous Pollutant and Two Different Particulate Matters from the Atmosphere of a City. Math. Comput. Model. 2008, 48, 832–844. [Google Scholar] [CrossRef]
- Bouissou, M. A Simple yet Efficient Acceleration Technique for Monte Carlo Simulation. In Proceedings of the 22nd European Safety and Reliability Conference (ESREL’13), Amsterdam, The Netherlands, 29 September–2 October 2013; pp. 27–36. [Google Scholar]
- Taco, D.; Ojeda Gutiérrez, M.; Reyes Castillo, A.; Izquierdo Iniguez, J. Determinación del Número Óptimo de Iteraciones para las Simulaciones por el Método de Montecarlo. Dyna Ing. E Ind. 2019, 94, 129–130. [Google Scholar] [CrossRef] [PubMed]
- Khatun, N. Applications of Normality Test in Statistical Analysis. Open J. Stat. 2021, 11, 113. [Google Scholar] [CrossRef]
- Chapra, S.C. Mass Balance, Steady-State Solution, and Response Time. In Surface Water-Quality Modeling; Lindenschmidt, K.-E., Ed.; Waveland Press: Long Grove, IL, USA, 2008; pp. 47–62. [Google Scholar]
- Nurujjaman, M. Enhanced Euler’s Method to Solve First Order Ordinary Differential Equations with Better Accuracy. J. Eng. Math. Stat. 2020, 4, 1–13. [Google Scholar]
- Kishimoto, N.; Ichise, S. Water Quality Problems in Japanese Lakes: A Brief Overview. IAHS-AISH Proc. Rep. 2013, 361, 132–141. [Google Scholar]
- Kishimoto, N.; Ueno, K. Influence of Phosphorus Concentration on the Biodegradation of Dissolved Organic Matter in Lake Biwa, Japan. J. Water Environ. Technol. 2011, 9, 215–223. [Google Scholar] [CrossRef]
- Imteaz, M.A.; Asaeda, T.; Lockington, D.A. Modelling the Effects of Inflow Parameters on Lake Water Quality. Environ. Model. Assess. 2003, 8, 63–70. [Google Scholar] [CrossRef]
- Varekamp, J.C. Lake Contamination Models for Evolution towards Steady State. J. Limnol. 2003, 62, 67–72. [Google Scholar] [CrossRef]
- Girardi, R.; Pinheiro, A.; Garbossa, L.H.P.; Torres, É. Water Quality Change of Rivers during Rainy Events in a Watershed with Different Land Uses in Southern Brazil. RBRH 2016, 21, 514–524. [Google Scholar] [CrossRef]
- Susilowati, S.; Sutrisno, J.; Masykuri, M.; Maridi, M. Dynamics and Factors That Affects DO-BOD Concentrations of Madiun River. In Proceedings of the The 3rd International Seminar on Chemistry: Green Chemistry and Its Role for Sustainability, Surabaya, Indonesia, 18–19 July 2018; AIP Publishing: Melville, NY, USA, 2018; Volume 2049. [Google Scholar]
- Stanford, D.A.; Taylor, P.; Ziedins, I. Waiting Time Distributions in the Accumulating Priority Queue. Queueing Syst. 2014, 77, 297–330. [Google Scholar] [CrossRef]
- Sundar, S.; Misra, A.K.; Naresh, R.; Shukla, J.B. Modelling the Effect of Washout of Hot Pollutants for Increasing Rain in an Industrial Area. Environ. Model. Assess. 2023, 28, 1083–1091. [Google Scholar] [CrossRef]
- Tripathi, A.; Misra, A.K.; Shukla, J.B. A Mathematical Model for the Removal of Pollutants from the Atmosphere through Artificial Rain. Stoch. Anal. Appl. 2022, 40, 379–396. [Google Scholar] [CrossRef]
- Naresh, R.; Sundar, S.; Shukla, J.B. Modeling the Removal of Primary and Secondary Pollutants from the Atmosphere of a City by Rain. Appl. Math. Comput. 2006, 179, 282–295. [Google Scholar] [CrossRef]
- Bartels, S. Runge-Kutta Methods. In Numerical Mathematics 3x9; Couturier, R., Nair, U., Somanath, S., Eds.; Springer: Berlin, Germany, 2025; pp. 191–200. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions | Description |
|---|---|
| Initial conditions | Before the company started its activities, the BOD5 concentration in the lake was in equilibrium with the river under non-rain conditions. |
| Variability of environmental conditions | Rainfall in the river’s drainage area has been recorded for 20% of the days in a given year, increasing the total river flow by 10–50% during rainfall events. The net organic load (mg/L·s) contributed by the river is constant and does not depend on rainfall events; thus, the dilution effect on the inlet concentration must be considered. |
| Variability of discharge properties | The flow rate and the pollutant load of the company’s discharge are variables and can be described by probability distributions: flow rate *N (500, 25) L/s and BOD5 concentration *U (360, 980) mg/L. |
| Organic load decomposition | The lake undergoes a first-order degradation process for organic matter, as commonly reported in the literature [33]. |
| Water flow | Evaporation or diffusion effects are neglected but inflow from rainfall events is considered, with a 20% likelihood of occurrence. There are no changes in water density, and the sum of the inlet flows equals the outlet flow. |
| Conditions | Description |
|---|---|
| Truck Arrival Time | According to a study by the administration, an average of 8 fully loaded garbage trucks arrive at the SWTP during the workday. Every day at 8:00 one truck discharges its contents. |
| Truck Types | Three types of trucks (A, B, C) arrive at the SWTP: Type A trucks (10 m3) make up 20% of the fleet, Type B trucks (7 m3) make up 20%, and Type C trucks (3 m3) account for the remaining 60%. |
| Sorting Efficiency | Between 5% and 10% of the waste volume is separated during manual sorting and sent for recycling. |
| Screening Efficiency | Of the total waste entering the screening process, 60% to 70% by volume is organic matter, and between 90% and 95% of this organic matter is recovered during screening. |
| Homogenization Chamber Conditions | The new chamber must ensure that, in 95% of possible scenarios, its capacity is not exceeded by more than 90%. |
| Scenario | Parameters | Description | Required Volume m3 |
|---|---|---|---|
| Minimum Volume | #Trucks = 8 VTrucks = 3 m3 Esorting = 10% %Mo = 70% Escreening = 95% | The minimum volume scenario assumes that only trucks with a capacity of 3 m3 will enter the SWTP, and that the efficiency of recovery of useful material in sorting, organic matter content and organic matter separation efficiency in screening is maximized. | 24.12 |
| Intermediate Volume | #Trucks = 8 VTrucks = 7 m3 Esorting = 7.5% %Mo = 65% Escreening = 92.5% | The scenario with intermediate volume assumes that only trucks with a capacity of 7 m3 will enter the SWTP, and that the other random variables take their average value for the calculation. | 68.85 |
| Maximum Volume | #Trucks = 8 VTrucks = 10 m3 Esorting = 5% %Mo = 60% Escreening = 90% | The maximum volume scenario assumes that only trucks with a capacity of 10 m3 will enter the SWTP, and that the efficiency of recovery of useful material in triage, organic matter content and organic matter separation efficiency in screening is minimal. | 116.53 |
| MC Volume | Random variables | Volume calculated after averaging 10 runs with 1000 iterations. | 94.71 |
| Conditions | Description |
|---|---|
| Initial conditions | Initially there is no water in the atmosphere and the PM concentration is of 100 µg·m−3. |
| Variability of emissions from mobile sources | The PM emitted from mobile sources follows a normal distribution N (100, 40) µg·m−3. |
| Variability of rain | The rain intensity is described using a log-normal distribution LogN (2, 6). The probability of rain is set at 50% for the MC simulations. For simulating streaks of drought, the rain probability was set at 10% whereas for describing periods of intense rainfall the rain probability was set at 90% for each timestep. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Parra-Angarita, S.L.; Gaviria, G.H.; Herrera-Ruiz, J.F.; Márquez, M.d.C. Monte Carlo Simulations as an Alternative for Solving Engineering Problems in Environmental Sciences: Three Case Studies. ChemEngineering 2025, 9, 140. https://doi.org/10.3390/chemengineering9060140
Parra-Angarita SL, Gaviria GH, Herrera-Ruiz JF, Márquez MdC. Monte Carlo Simulations as an Alternative for Solving Engineering Problems in Environmental Sciences: Three Case Studies. ChemEngineering. 2025; 9(6):140. https://doi.org/10.3390/chemengineering9060140
Chicago/Turabian StyleParra-Angarita, Sergio Luis, Guillermo H. Gaviria, Juan F. Herrera-Ruiz, and María del Carmen Márquez. 2025. "Monte Carlo Simulations as an Alternative for Solving Engineering Problems in Environmental Sciences: Three Case Studies" ChemEngineering 9, no. 6: 140. https://doi.org/10.3390/chemengineering9060140
APA StyleParra-Angarita, S. L., Gaviria, G. H., Herrera-Ruiz, J. F., & Márquez, M. d. C. (2025). Monte Carlo Simulations as an Alternative for Solving Engineering Problems in Environmental Sciences: Three Case Studies. ChemEngineering, 9(6), 140. https://doi.org/10.3390/chemengineering9060140