
An Evaluation System of Robotic End-Effectors for Food Handling




Abstract
:1. Introduction
- 1.
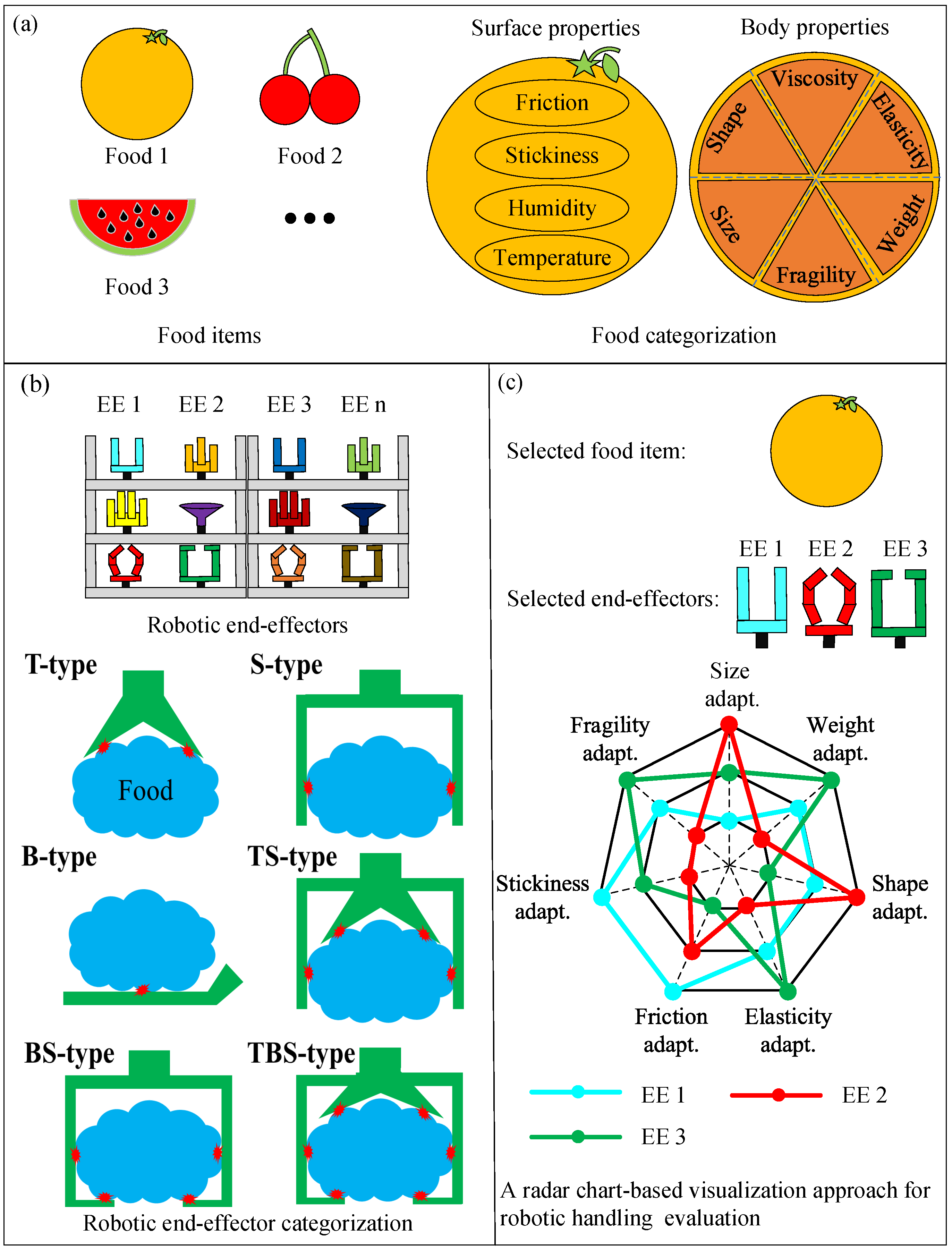
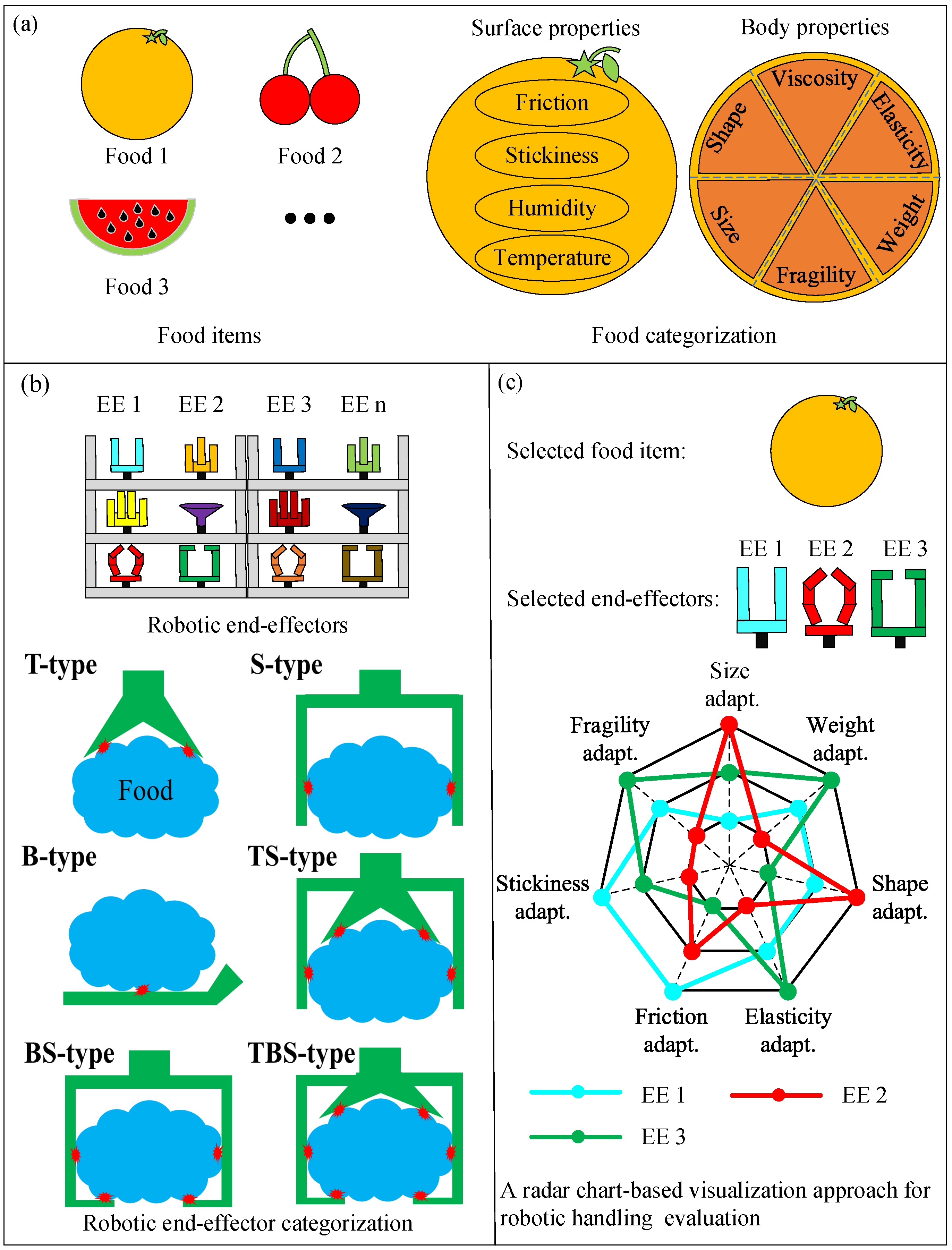
- Food categorization was proposed based on the food properties related to robotic handling.
- 2.
- Pick-and-place tests were performed on the categorized food items using several commercialized and under-developed robotic end-effectors.
- 3.
- A scoring system was proposed to evaluate the handling performance of robotic end-effectors.
- 4.
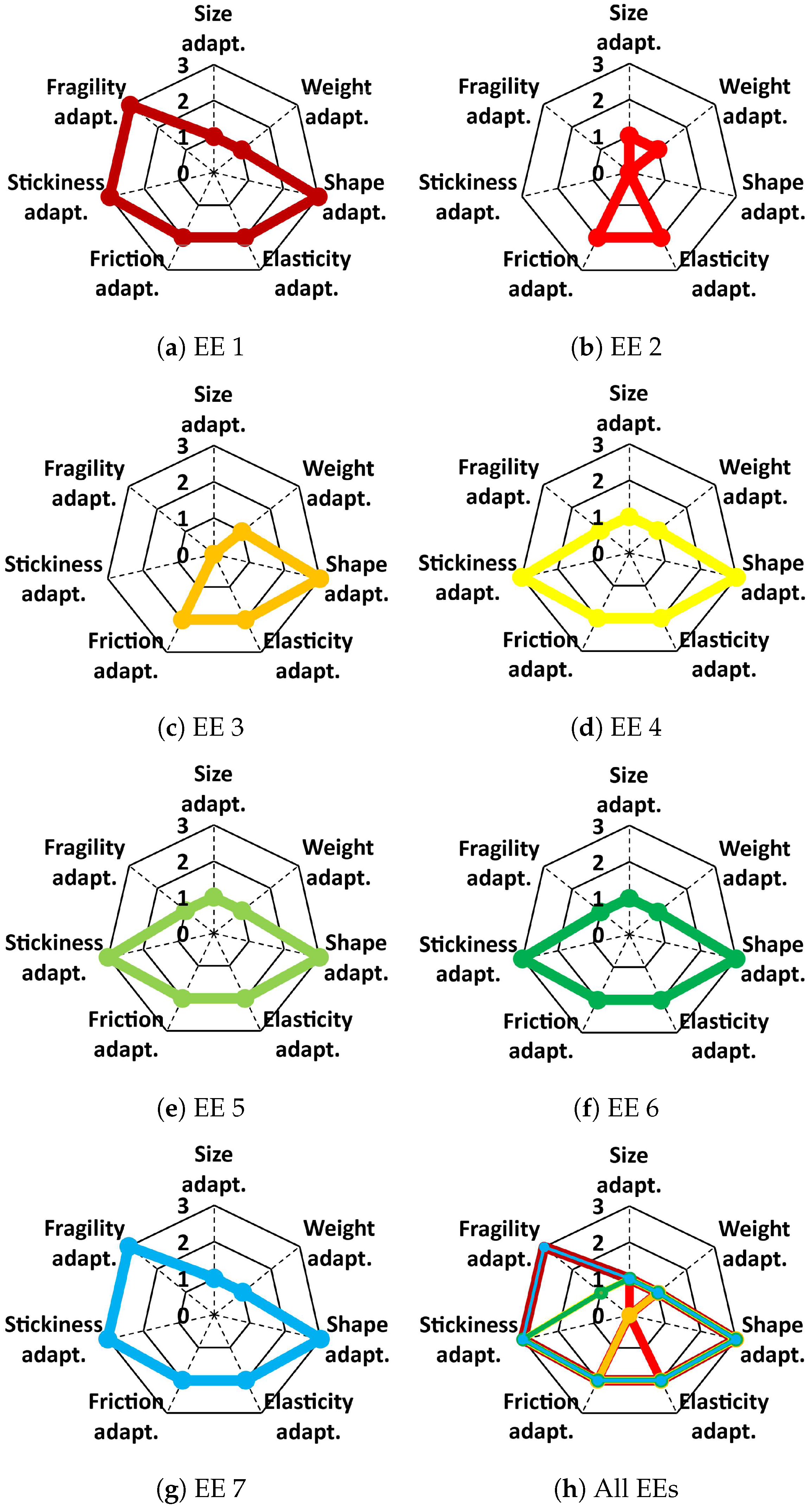
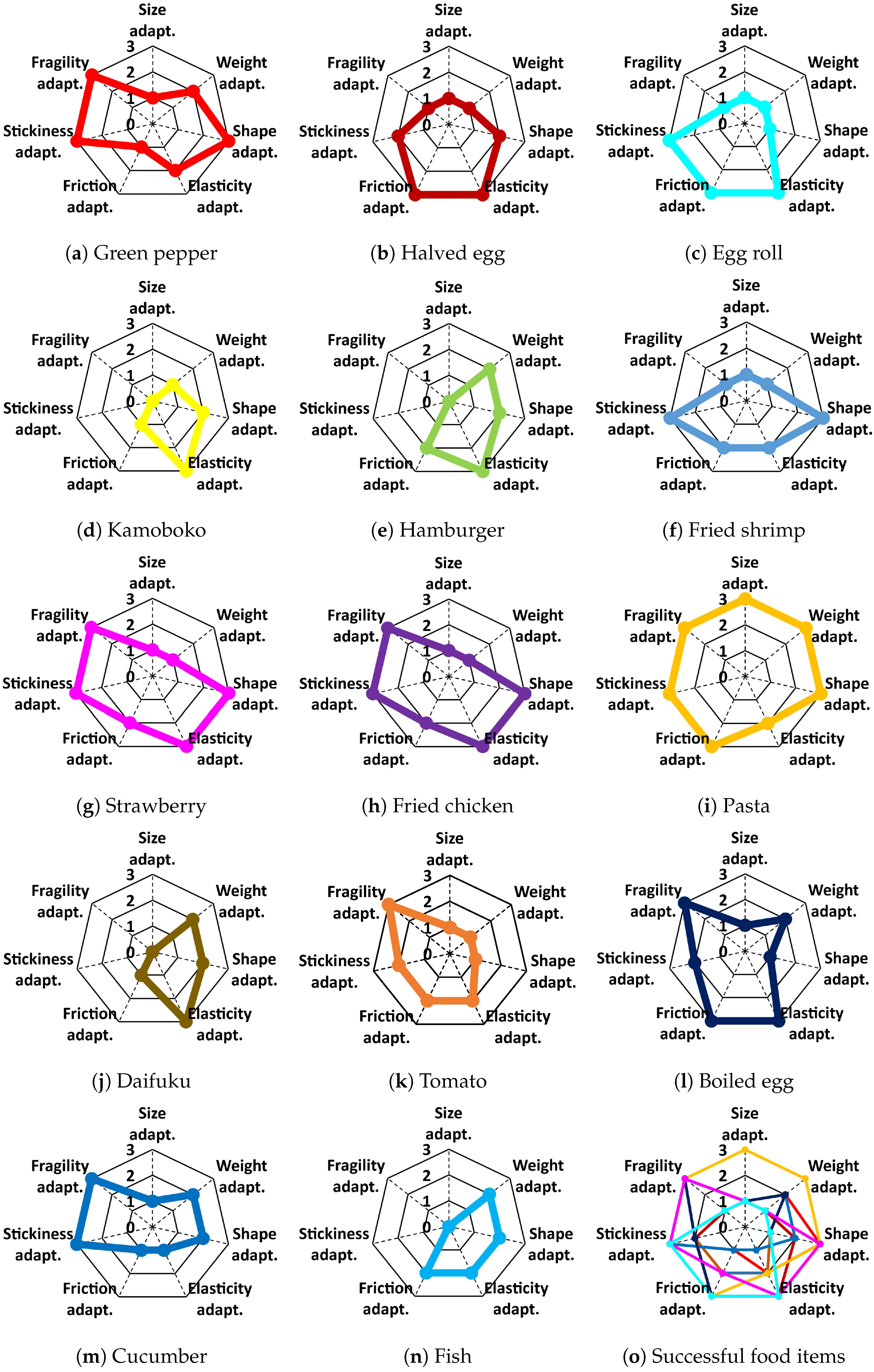
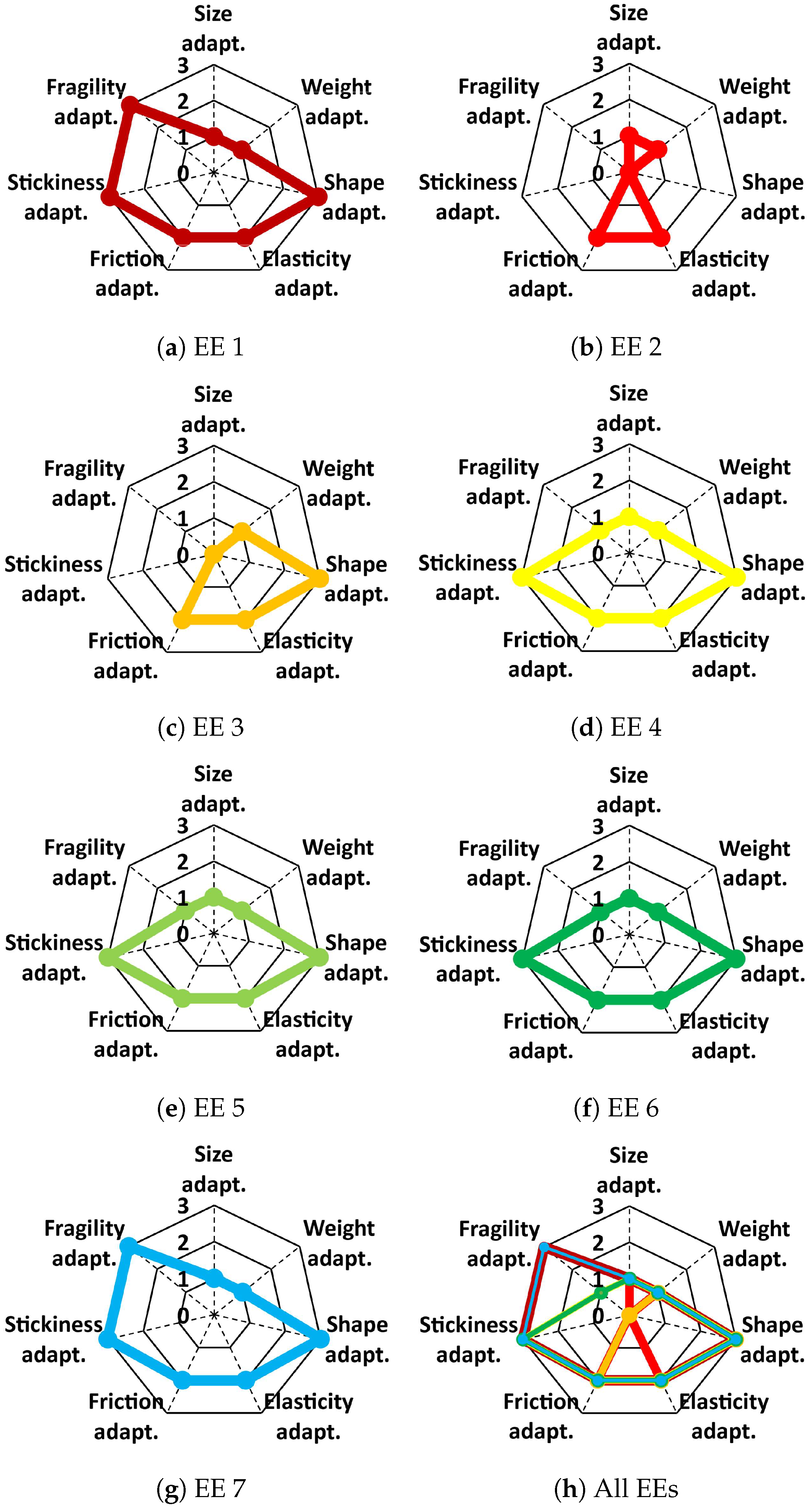
- A visualization approach using a radar chart was proposed to present the evaluation results and compare of different end-effectors.
2. Materials and Methods
2.1. Concept
2.2. Food Categorization
2.2.1. Body Properties
2.2.2. Surface Properties
2.3. End-Effector Categorization
2.4. Scoring Approach
2.4.1. Shape Adaptability
2.4.2. Size Adaptability
2.4.3. Weight Adaptability
2.4.4. Friction Adaptability
2.4.5. Elasticity Adaptability
2.4.6. Stickiness Adaptability
2.4.7. Fragility Adaptability
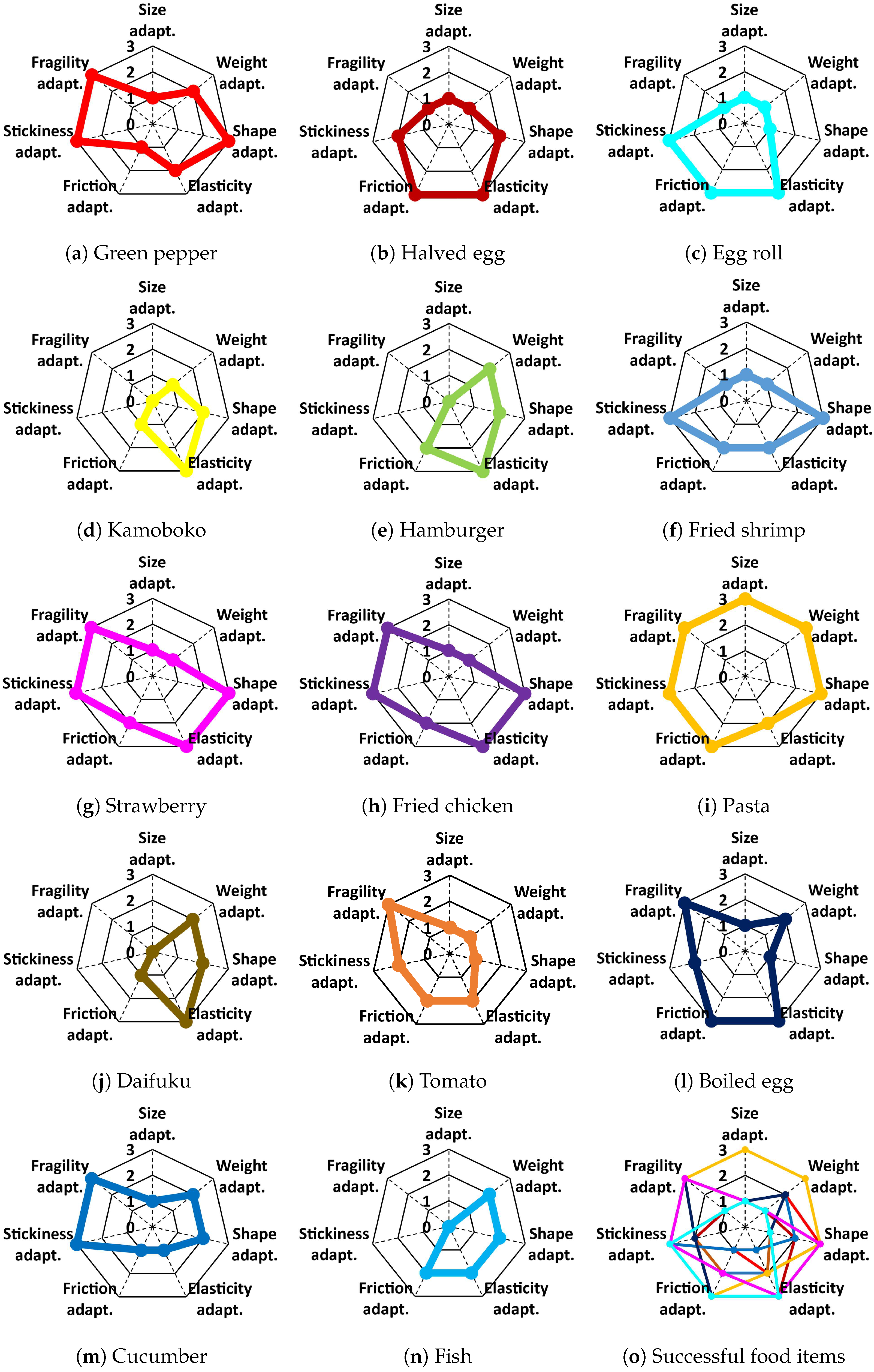
2.5. Visualization Approach
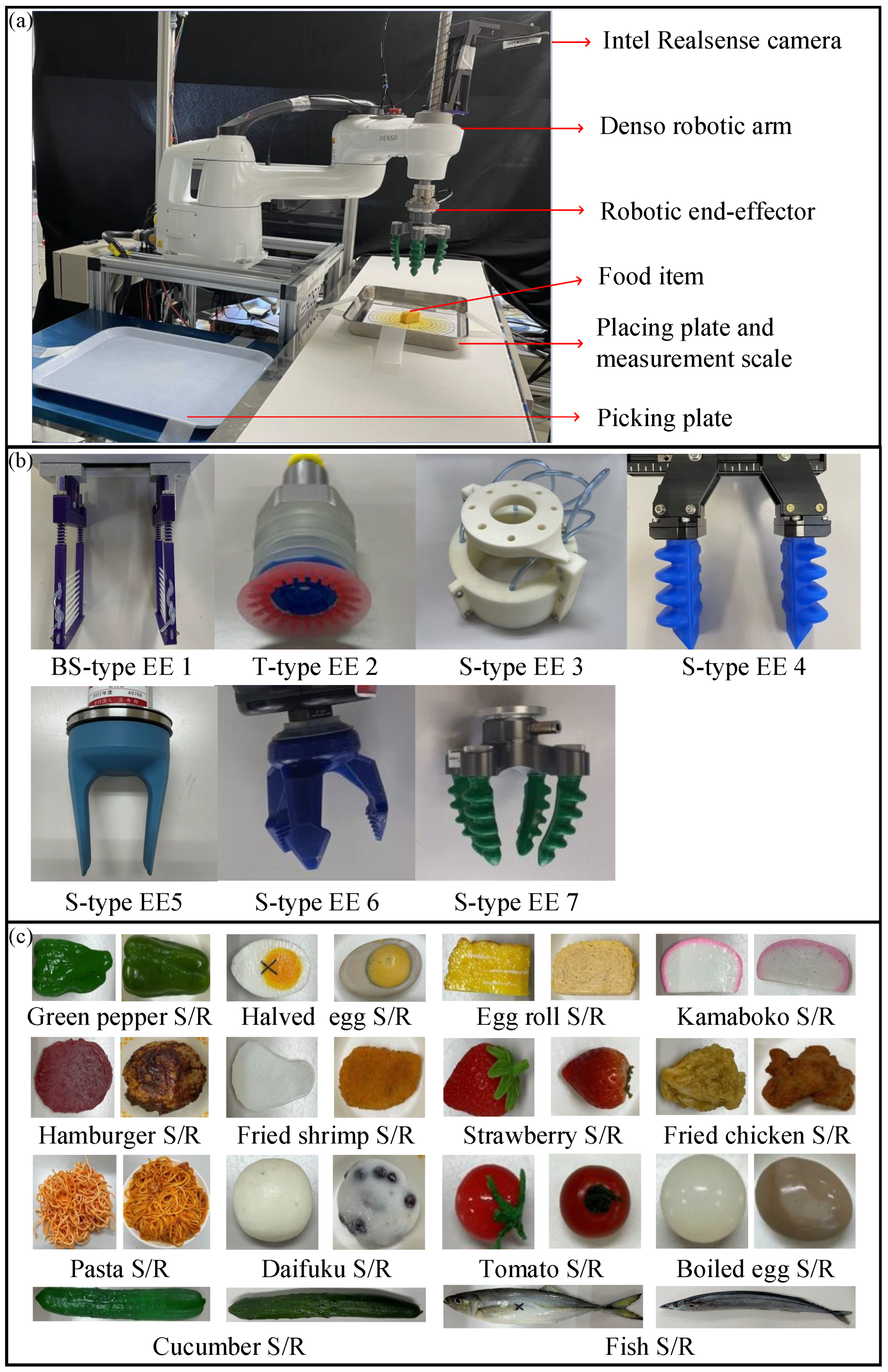
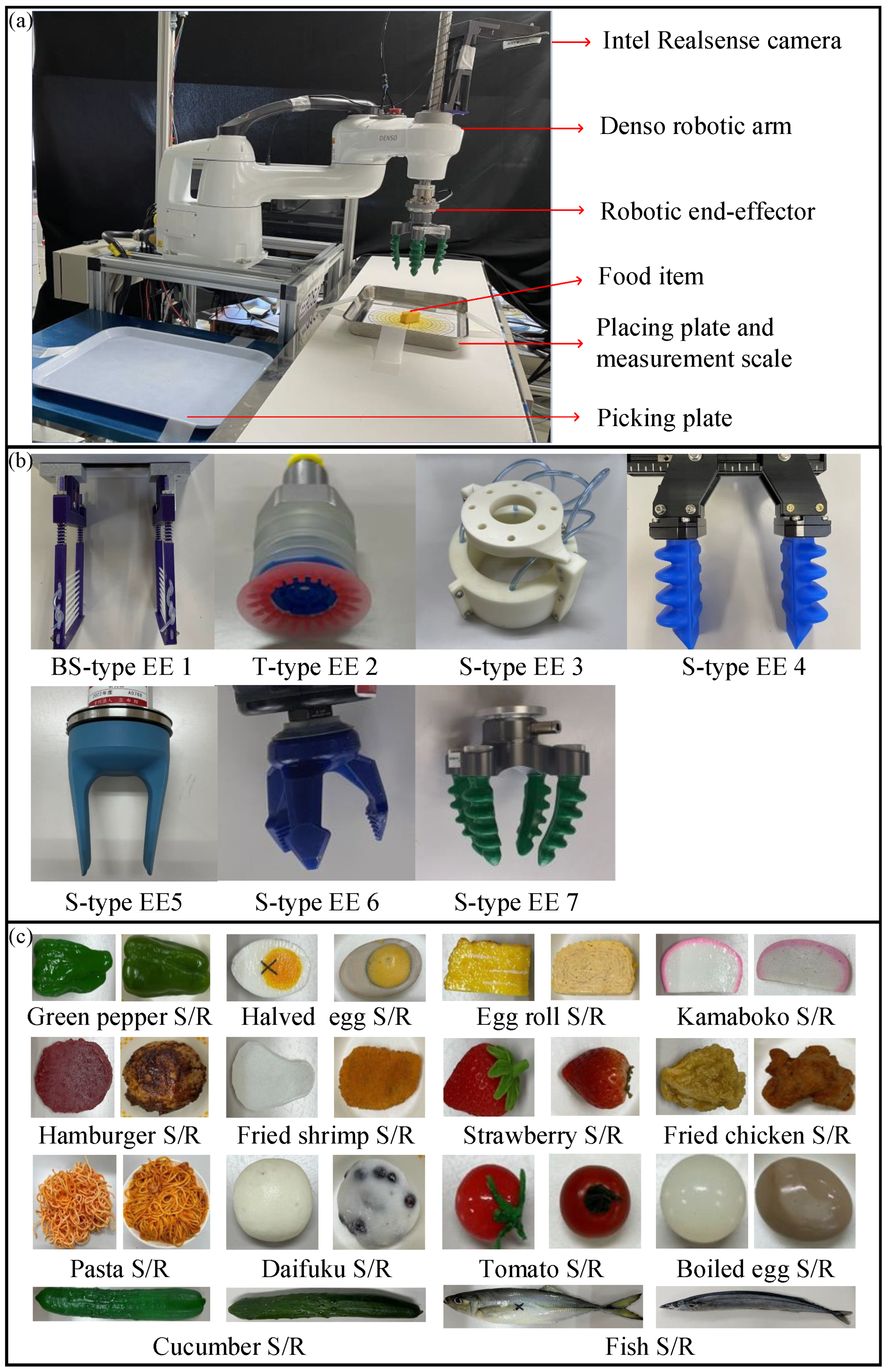
2.6. Experiment Methods
2.6.1. Tested Soft End-Effectors
2.6.2. Tested Food Items
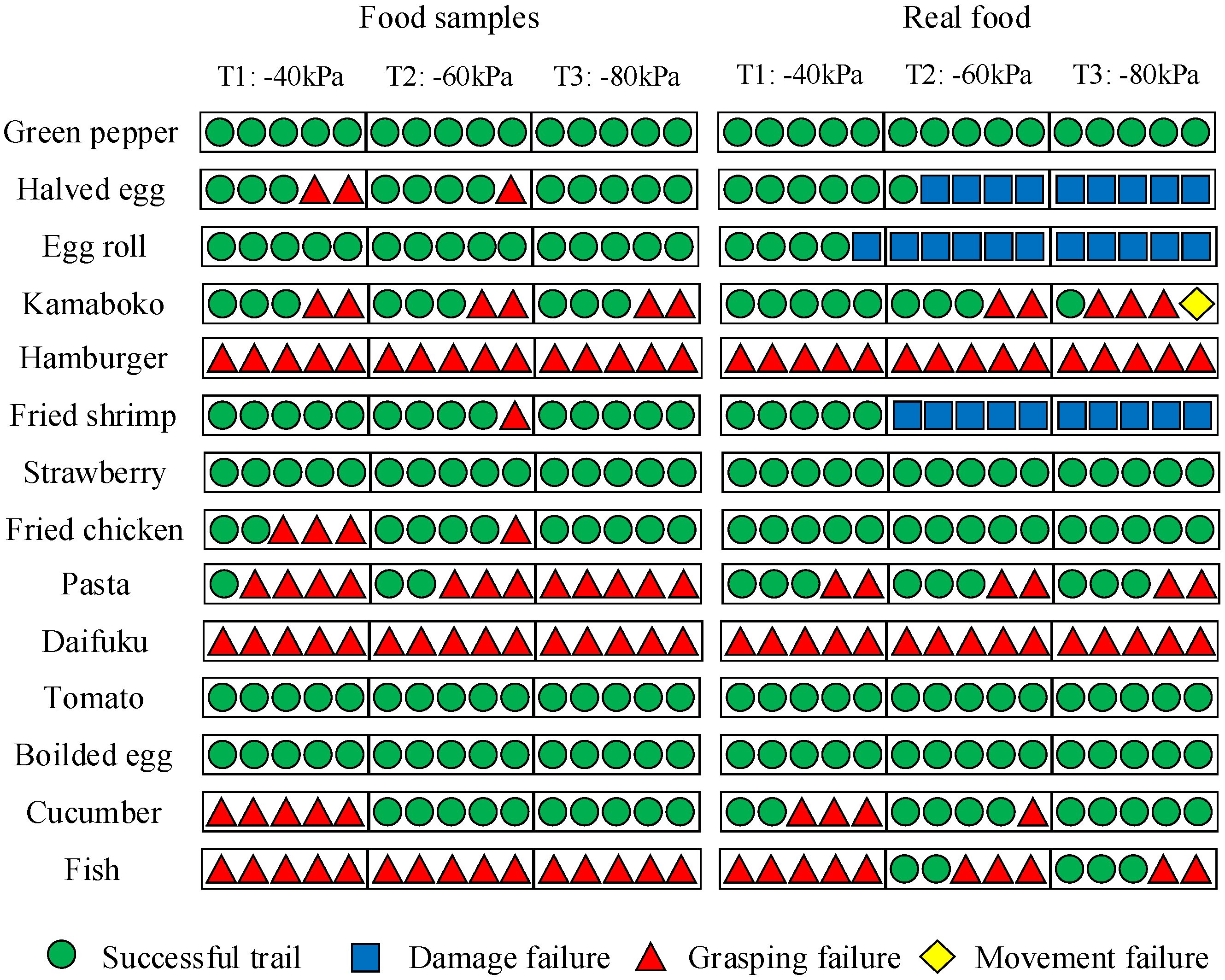
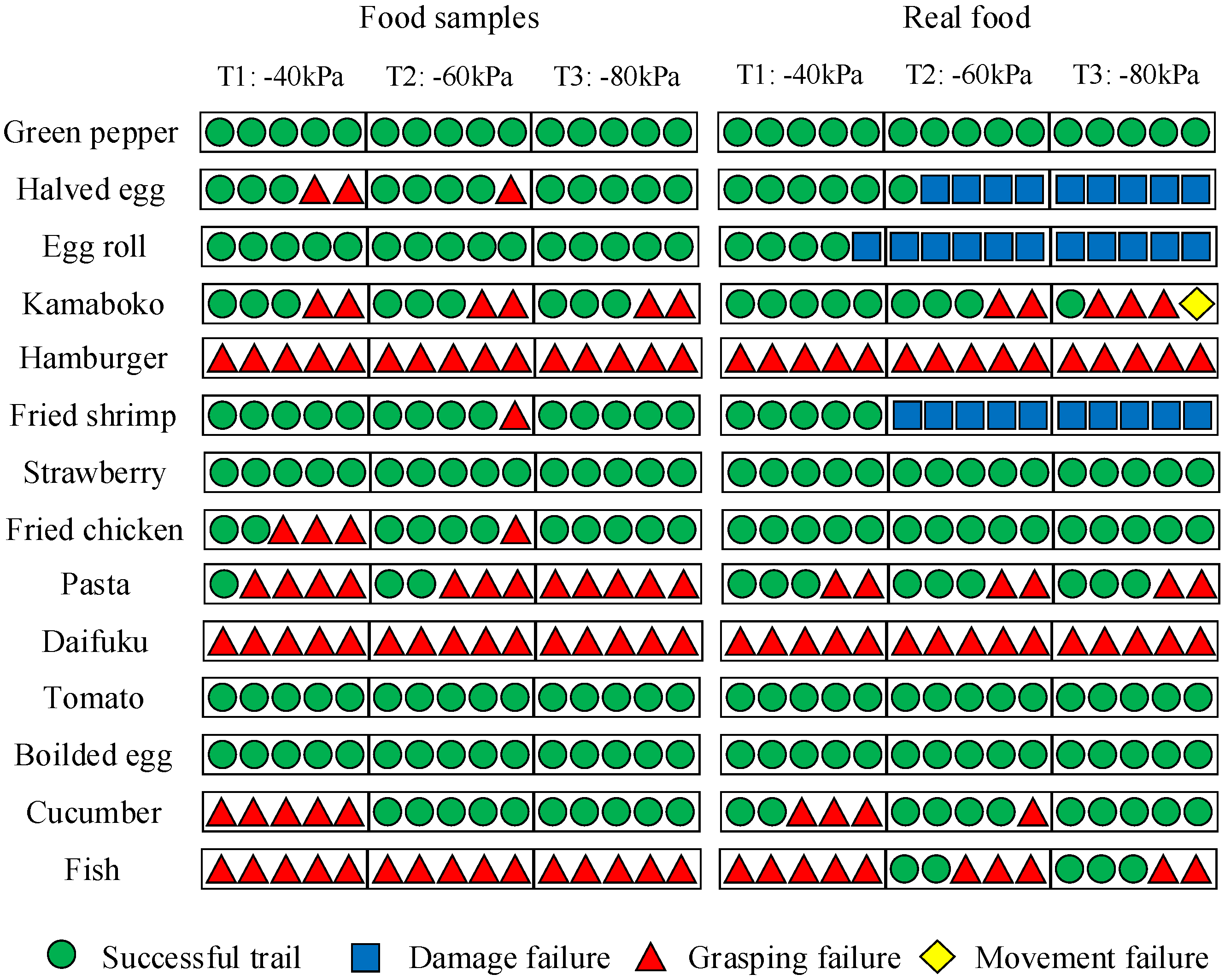
2.6.3. Experimental Protocols
3. Results and Discussion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Earle, M.D. Innovation in the food industry. Trends Food Sci. Technol. 1997, 8, 166–175. [Google Scholar] [CrossRef]
- Henry, R. Innovations in agriculture and food supply in response to the COVID-19 pandemic. Mol. Plant 2020, 13, 1095. [Google Scholar] [CrossRef]
- Williams, S.H.; Wright, B.W.; Truong, V.d.; Daubert, C.R.; Vinyard, C.J. Mechanical properties of foods used in experimental studies of primate masticatory function. Am. J. Primatol. Off. J. Am. Soc. Primatol. 2005, 67, 329–346. [Google Scholar] [CrossRef] [PubMed]
- Ogawa, Y.; Matsuura, M.; Yamamoto, N. Young’s modulus and poisson’s ratio changes in japanese radish and carrot root tissues during boiling. Int. J. Food Prop. 2015, 18, 1006–1013. [Google Scholar] [CrossRef]
- Kadowaki, R.; Inou, N.; Kimura, H. Measurement of microscopic young’s modulus of crispy foods. Int. Proc. Chem. Biol. Environ. Eng. 2013, 50, 79–83. [Google Scholar]
- Sinha, A.; Bhargav, A. Young’s modulus estimation in food samples: Effect of experimental parameters. Mech. Ind. 2020, 21, 404. [Google Scholar] [CrossRef]
- Singh, A.P.; Lakes, R.S.; Gunasekaran, S. Viscoelastic characterization of selected foods over an extended frequency range. Rheol. Acta 2006, 46, 131–142. [Google Scholar] [CrossRef]
- Wang, Z.; Hirai, S. Finite element modeling and physical property estimation of rheological food objects. J. Food Res. 2012, 1, 48. [Google Scholar] [CrossRef]
- Wang, Z.; Hirai, S. Modeling and parameter estimation of rheological objects for simultaneous reproduction of force and deformation. In Proceedings of the 1st International Conference on Applied Bionics and Biomechanics, Venice, Italy, 14–16 October 2010. [Google Scholar]
- Sakamoto, N.; Higashimori, M.; Tsuji, T.; Kaneko, M. An optimum design of robotic food handling by using Burger model. Intell. Serv. Robot. 2009, 2, 53–60. [Google Scholar] [CrossRef]
- Sakamoto, N.; Higashimori, M.; Tsuji, T.; Kaneko, M. An optimum design of robotic hand for handling a visco-elastic object based on maxwell model. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 1219–1225. [Google Scholar]
- Joyner, H.S.; Pernell, C.W.; Daubert, C.R. Impact of formulation and saliva on acid milk gel friction behavior. J. Food Sci. 2014, 79, E867–E880. [Google Scholar]
- Chojnicka-Paszun, A.; de Jongh, H.H. Friction properties of oral surface analogs and their interaction with polysaccharide/MCC particle dispersions. Food Res. Int. 2014, 62, 1020–1028. [Google Scholar] [CrossRef]
- Fuhrmann, P.L.; Aguayo-Mendoza, M.; Jansen, B.; Stieger, M.; Scholten, E. Characterisation of friction behaviour of intact soft solid foods and food boli. Food Hydrocoll. 2020, 100, 105441. [Google Scholar] [CrossRef]
- Wang, Z.; Inoue, S.; Hashimoto, Y.; Kawamura, S. Measuring viscoelasticity and friction of tempuras for robotic handling. J. Food Eng. 2021, 310, 110707. [Google Scholar] [CrossRef]
- Balcerzak, K.; Weres, J.; Górna, K.; Idziaszek, P. Modeling of agri-food products on the basis of solid geometry with examples in Autodesk 3ds Max and finite element mesh generation. J. Res. Appl. Agric. Eng. 2015, 60, 5–8. [Google Scholar]
- Goñi, S.M.; Purlis, E.; Salvadori, V.O. Geometry modelling of food materials from magnetic resonance imaging. J. Food Eng. 2008, 88, 561–567. [Google Scholar] [CrossRef]
- Weres, J.; Nowakowski, K.; Koszela, K.; Rogacki, P.; Jarysz, M. Image analysis and 3D geometry modelling in investigating agri-food product properties. In Proceedings of the EFITA Conference, Rhodes, Greece, 27–29 June 2009; Volume 9, pp. 67–72. [Google Scholar]
- Ding, K.; Gunasekaran, S. Shape feature extraction and classification of food material using computer vision. Trans. ASAE 1994, 37, 1537–1545. [Google Scholar] [CrossRef]
- Australian Food Composition Database. 2022. Available online: https://www.foodstandards.gov.au/\science/monitoringnutrients/afcd/pages/default.aspx (accessed on 5 October 2023).
- FoodData Central. 2023. Available online: https://fdc.nal.usda.gov/ (accessed on 5 October 2023).
- Foodb. 2023. Available online: https://foodb.ca/ (accessed on 5 October 2023).
- Bossard, L.; Guillaumin, M.; Van Gool, L. Food-101–mining discriminative components with random forests. In Proceedings of the Computer Vision–ECCV 2014: 13th European Conference, Zurich, Switzerland, 6–12 September 2014; pp. 446–461. [Google Scholar]
- FoodCam. 2023. Available online: https://foodcam.mobi/dataset.html/ (accessed on 5 October 2023).
- Matsuda, Y.; Hoashi, H.; Yanai, K. Recognition of multiple-food images by detecting candidate regions. In Proceedings of the 2012 IEEE International Conference on Multimedia and Expo, Melbourne, VIC, Australia, 9–13 July 2012; pp. 25–30. [Google Scholar]
- Meyers, A.; Johnston, N.; Rathod, V.; Korattikara, A.; Gorban, A.; Silberman, N.; Guadarrama, S.; Papandreou, G.; Huang, J.; Murphy, K.P. Im2Calories: Towards an automated mobile vision food diary. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1233–1241. [Google Scholar]
- Wurdemann, H.A.; Aminzadeh, V.; Dai, J.S.; Reed, J.; Purnell, G. Category-based food ordering processes. Trends Food Sci. Technol. 2011, 22, 14–20. [Google Scholar] [CrossRef]
- Erzincanli, F.; Sharp, J. A classification system for robotic food handling. Food Control 1997, 8, 191–197. [Google Scholar] [CrossRef]
- Fantoni, G.; Santochi, M.; Dini, G.; Tracht, K.; Scholz-Reiter, B.; Fleischer, J.; Lien, T.K.; Seliger, G.; Reinhart, G.; Franke, J.; et al. Grasping devices and methods in automated production processes. Cirp Ann. 2014, 63, 679–701. [Google Scholar] [CrossRef]
- Soft Robotics, Inc. 2012. Available online: https://www.softroboticsinc.com/industries/food-and-beverage/ (accessed on 5 October 2023).
- Soft Robot Technology Co., Ltd. 2016. Available online: https://www.softrobottech.com/web/en/ (accessed on 5 October 2023).
- SoftGripping Corp. 2015. Available online: https://soft-gripping.com/ (accessed on 5 October 2023).
- piSOFTGRIP. 2018. Available online: https://www.piab.com/suction-cups-and-soft-grippers/soft-grippers/ (accessed on 5 October 2023).
- Suzhou Rochu Robotics Co.,Ltd. 2016. Available online: https://www.softroboticgripper.com/ (accessed on 5 October 2023).
- Wang, Z.; Makiyama, Y.; Hirai, S. A soft needle gripper capable of grasping and piercing for handling food materials. J. Robot. Mechatronics 2021, 33, 935–943. [Google Scholar] [CrossRef]
- Koivikko, A.; Drotlef, D.M.; Sitti, M.; Sariola, V. Magnetically switchable soft suction grippers. Extrem. Mech. Lett. 2021, 44, 101263. [Google Scholar] [CrossRef]
- Pettersson, A.; Davis, S.; Gray, J.O.; Dodd, T.J.; Ohlsson, T. Design of a magnetorheological robot gripper for handling of delicate food products with varying shapes. J. Food Eng. 2010, 98, 332–338. [Google Scholar] [CrossRef]
- Bryan, P.; Kumar, S.; Sahin, F. Design of a soft robotic gripper for improved grasping with suction cups. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 2405–2410. [Google Scholar]
- Li, S.; Stampfli, J.J.; Xu, H.J.; Malkin, E.; Diaz, E.V.; Rus, D.; Wood, R.J. A vacuum-driven origami “magic-ball” soft gripper. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 7401–7408. [Google Scholar]
- Amend, J.; Cheng, N.; Fakhouri, S.; Culley, B. Soft robotics commercialization: Jamming grippers from research to product. Soft Robot. 2016, 3, 213–222. [Google Scholar] [CrossRef] [PubMed]
- Kuriyama, Y.; Okino, Y.; Wang, Z.; Hirai, S. A wrapping gripper for packaging chopped and granular food materials. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019; pp. 114–119. [Google Scholar]
- Wang, Z.; Or, K.; Hirai, S. A dual-mode soft gripper for food packaging. Robot. Auton. Syst. 2020, 125, 103427. [Google Scholar] [CrossRef]
- Hao, Y.; Biswas, S.; Hawkes, E.W.; Wang, T.; Zhu, M.; Wen, L.; Visell, Y. A multimodal, enveloping soft gripper: Shape conformation, bioinspired adhesion, and expansion-driven suction. IEEE Trans. Robot. 2020, 37, 350–362. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef]
- Wang, Z.; Hirai, S.; Kawamura, S. Challenges and Opportunities in Robotic Food Handling: A Review. Front. Robot. 2022, 8, 433. [Google Scholar] [CrossRef] [PubMed]
- SWITL. 2023. Available online: https://www.furukawakikou.co.jp/switl/ (accessed on 5 October 2023).
- RightHand Robotics. 2023. Available online: https://righthandrobotics.com/ (accessed on 5 October 2023).
- Ma, S.; Du, L.; Tsuchiya, E.; Fuchimi, M. Paper-made grippers for soft food gasping. In Proceedings of the 2020 17th International Conference on Ubiquitous Robots (UR), Kyoto, Japan, 22–26 June 2020; pp. 362–367. [Google Scholar]
- Gafer, A.; Heymans, D.; Prattichizzo, D.; Salvietti, G. The quad-spatula gripper: A novel soft-rigid gripper for food handling. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 39–45. [Google Scholar]
- Sam, R.; Nefti, S. Design and feasibility tests of multi-functional gripper for handling variable shape of food products. In Proceedings of the 2010 IEEE International Conference on Systems, Man and Cybernetics, Istanbul, Turkey, 10–13 October 2010; pp. 1267–1272. [Google Scholar]
- Wang, Z.; Furuta, H.; Hirai, S.; Kawamura, S. A scooping-binding robotic gripper for handling various food products. Front. Robot. 2021, 8, 43. [Google Scholar] [CrossRef]
- Wang, Z.; Kanegae, R.; Hirai, S. Circular shell gripper for handling food products. Soft Robot. 2021, 8, 542–554. [Google Scholar] [CrossRef]
- Wang, Z.; Kadoma, K.; Hirai, S. An Indentation-Type Instrument for Measuring Soft Tissue Elasticity. Smart Innov. Syst. Technol. 2018, 71, 121–129. [Google Scholar]
- Zardetto, S.; Rosa, M.D. Effect of extrusion process on properties of cooked, fresh egg pasta. J. Food Eng. 2009, 92, 70–77. [Google Scholar] [CrossRef]
- Knuth, M.; Marone, C. Friction of sheared granular layers: Role of particle dimensionality, surface roughness, and material properties. Geochem. Geophys. Geosyst. 2007, 8, Q03012. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Food Items | Weight (g) |
Size (mm) | Shape |
Elasticity (kPa) | Friction |
|---|---|---|---|---|---|
| Green pepper | 33∼38 | 46∼54 | IR | 166.00 | 1.35∼1.53 |
| Halved egg | 21∼23 | 37∼39 | SR | 43.47 | 0.32∼0.46 |
| Egg roll | 25∼26 | 28∼29 | R | 25.11 | 0.41∼0.59 |
| Kamaboko | 5∼7 | 21∼22 | SR | 52.27 | 1.42∼1.68 |
| Hamburger | 139∼141 | 60∼67 | SR | 15.00 | 0.34∼0.42 |
| Fried shrimp | 22∼24 | 40∼41 | IR | 384.40 | 0.50∼0.72 |
| Strawberry | 14∼18 | 25∼28 | IR | 29.55 | 0.57∼0.95 |
| Fried chicken | 25∼32 | 38∼45 | IR | 19.55 | 0.42∼0.64 |
| Pasta | 309∼310 | 200 | IR | 158.00 | 0.20∼0.30 |
| Daifuku | 55∼62 | 44∼46 | SR | 11.15 | 1.54∼1.69 |
| Tomato | 12∼13 | 24∼26 | R | 410.30 | 0.44∼0.65 |
| Boiled egg | 41∼42 | 38∼40 | R | 52.46 | 0.32∼0.46 |
| Cucumber | 89∼129 | 20∼28 | SR | 987.20 | 1.02∼1.23 |
| Fish | 103∼108 | 35∼37 | SR | 138.70 | 0.60∼0.71 |
| EE 1 | EE 2 | EE 3 | EE 4 | EE 5 | EE 6 | EE 7 | |
|---|---|---|---|---|---|---|---|
| Green pepper | 108 | 0 | 0 | 0 | 108 | 72 | 108 |
| Halved egg | 108 | 0 | 0 | 108 | 36 | 108 | 108 |
| Egg roll | 0 | 0 | 0 | 27 | 27 | 54 | 0 |
| Kamaboko | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Hamburger | 432 | 0 | 0 | 432 | 0 | 0 | 0 |
| Fried shrimp | 108 | 0 | 0 | 36 | 36 | 36 | 108 |
| Strawberry | 162 | 0 | 0 | 162 | 162 | 162 | 162 |
| Fried chicken | 162 | 0 | 0 | 0 | 162 | 162 | 162 |
| Pasta | 0 | 0 | 0 | 0 | 1458 | 1458 | 0 |
| Daifuku | 216 | 0 | 216 | 216 | 0 | 216 | 216 |
| Tomato | 24 | 0 | 0 | 0 | 24 | 24 | 24 |
| Boiled egg | 54 | 0 | 0 | 0 | 108 | 108 | 108 |
| Cucumber | 24 | 0 | 0 | 0 | 36 | 0 | 0 |
| Fish | 144 | 0 | 0 | 144 | 0 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, Z.; Paul, H.; Wang, Z.; Hirai, S.; Kawamura, S. An Evaluation System of Robotic End-Effectors for Food Handling. Foods 2023, 12, 4062. https://doi.org/10.3390/foods12224062
Qiu Z, Paul H, Wang Z, Hirai S, Kawamura S. An Evaluation System of Robotic End-Effectors for Food Handling. Foods. 2023; 12(22):4062. https://doi.org/10.3390/foods12224062
Chicago/Turabian StyleQiu, Zhe, Hannibal Paul, Zhongkui Wang, Shinichi Hirai, and Sadao Kawamura. 2023. "An Evaluation System of Robotic End-Effectors for Food Handling" Foods 12, no. 22: 4062. https://doi.org/10.3390/foods12224062
APA StyleQiu, Z., Paul, H., Wang, Z., Hirai, S., & Kawamura, S. (2023). An Evaluation System of Robotic End-Effectors for Food Handling. Foods, 12(22), 4062. https://doi.org/10.3390/foods12224062