A Novel System of Mixed RF/FSO UAV Communication Based on MRR and RIS by Adopting Hybrid Modulation



 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
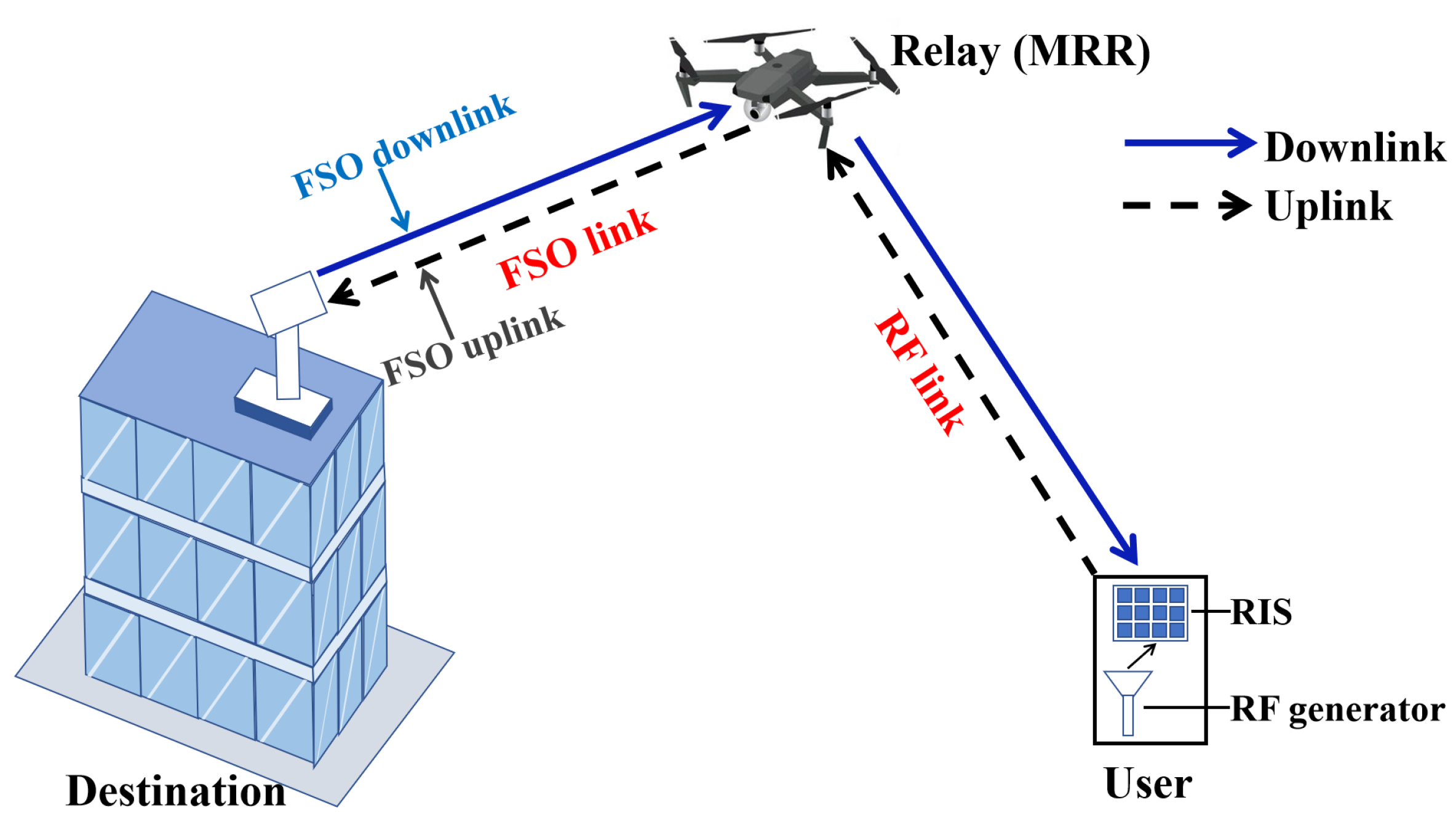
2. System and Theoretical Model
2.1. RF Link
2.2. FSO Link
2.3. CDF of End-to-End SNR
3. Performance Analysis
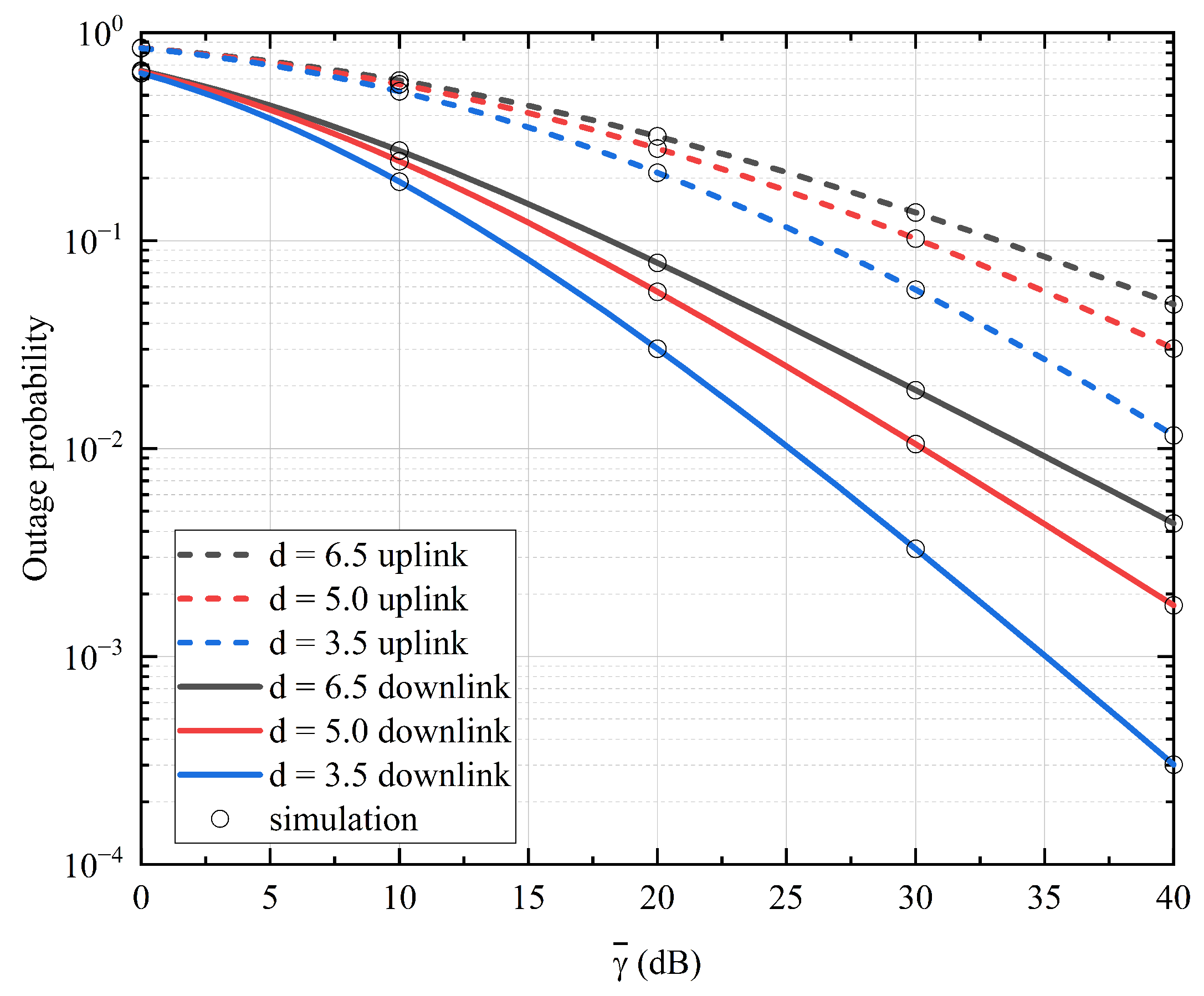
3.1. Outage Probability
3.1.1. End-to-End Uplink
3.1.2. End-to-End Downlink
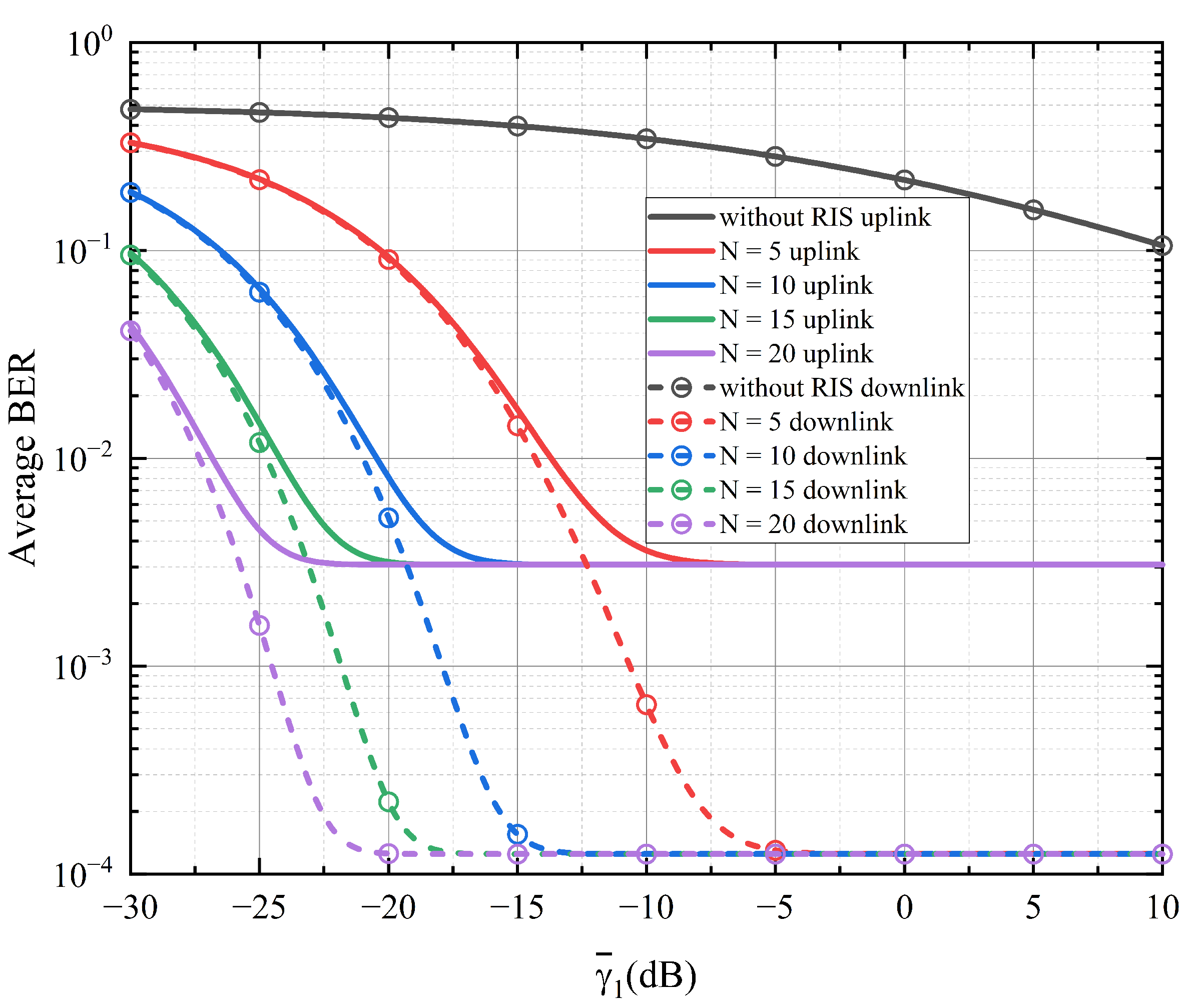
3.2. Average Bit Error Rate
3.2.1. End-to-End Uplink
3.2.2. End-to-End Downlink
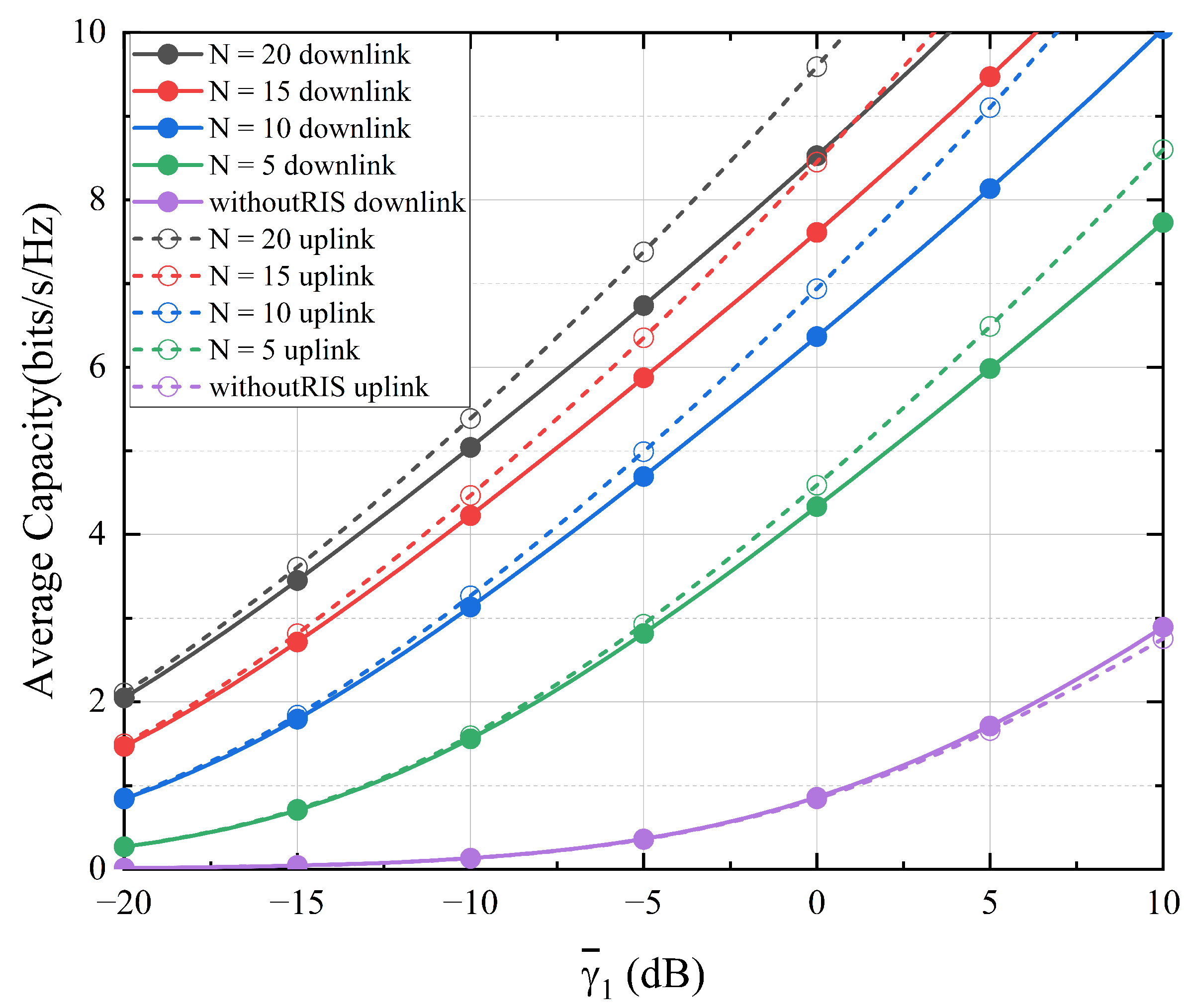
3.3. Average Channel Capacity
3.3.1. End-to-End Uplink
3.3.2. End-to-End Downlink
4. Numerical Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khalighi, M.A.; Uysal, M. Survey on free space optical communication: A communication theory perspective. IEEE Commun. Surv. Tutor. 2014, 16, 2231–2258. [Google Scholar] [CrossRef]
- Anbarasi, K.; Hemanth, C.; Sangeetha, R. A review on channel models in free space optical communication systems. Opt. Laser Technol. 2017, 97, 161–171. [Google Scholar] [CrossRef]
- Alzenad, M.; Shakir, M.Z.; Yanikomeroglu, H.; Alouini, M.S. FSO-Based Vertical Backhaul/Fronthaul Framework for 5G+ Wireless Networks. IEEE Commun. Mag. 2018, 56, 218–224. [Google Scholar] [CrossRef] [Green Version]
- Kaushal, H.; Kaddoum, G. Optical Communication in Space: Challenges and Mitigation Techniques. IEEE Commun. Surv. Tutor. 2017, 19, 57–96. [Google Scholar] [CrossRef] [Green Version]
- Lee, E.; Park, J.; Han, D.; Yoon, G. Performance analysis of the asymmetric dual-hop relay transmission with mixed RF/FSO links. IEEE Photonics Technol. Lett. 2011, 23, 1642–1644. [Google Scholar] [CrossRef]
- Kong, H.; Lin, M.; Zhu, W.P.; Amindavar, H.; Alouini, M.S. Multiuser scheduling for asymmetric FSO/RF links in satellite-UAV-terrestrial networks. IEEE Wirel. Commun. Lett. 2020, 9, 1235–1239. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Goetz, P.G.; Rabinovich, W.S.; Mahon, R.; Murphy, J.L.; Ferraro, M.S.; Suite, M.R.; Smith, W.R.; Burris, H.R.; Moore, C.I.; Schultz, W.W.; et al. Modulating Retro-Reflector Lasercom Systems for Small Unmanned Vehicles. IEEE J. Sel. Areas Commun. 2012, 30, 986–992. [Google Scholar] [CrossRef]
- Achour, M. Free-space optical communication by retromodulation: Concept, technologies, and challenges. In Advanced Free-Space Optical Communications Techniques and Technologies; SPIE: Bellingham, WA, USA, 2004; Volume 5614, pp. 52–63. [Google Scholar] [CrossRef]
- Gilbreath, G.C.; Rabinovich, W.S.; Meehan, T.J.; Vilcheck, M.J.; Mahon, R.; Burris, R.; Stell, M.F.; Sokolsky, I.; Vasquez, J.A.; Bovais, C.S.; et al. Compact lightweight payload for covert datalink using a multiple quantum well modulating retroreflector on a small rotary-wing unmanned airborne vehicle. In Airborne Reconnaissance XXIV; SPIE: Bellingham, WA, USA, 2000; Volume 4127, pp. 57–67. [Google Scholar] [CrossRef] [Green Version]
- Junique, S.; Agren, D.; Wang, Q.; Almqvist, S.; Noharet, B.; Andersson, J.Y. A modulating retro-reflector for free-space optical communication. IEEE Photonics Technol. Lett. 2005, 18, 85–87. [Google Scholar] [CrossRef]
- Li, X.; Zhao, X.; Zhang, P. Bit error rate analysis for modulating retro-reflector free space optical communications with adaptive threshold over correlated Gamma Gamma fading channels. IEEE Commun. Lett. 2019, 23, 2275–2278. [Google Scholar] [CrossRef]
- Yang, G.; Li, C.; Li, J.; Geng, H.; Bi, M.; Fan, B.; Wang, T. Performance analysis of full duplex modulating retro-reflector free-space optical communications over single and double Gamma-Gamma fading channels. IEEE Trans. Commun. 2018, 66, 3597–3609. [Google Scholar] [CrossRef]
- El Saghir, B.M.; El Mashade, M.B.; Aboshosha, A.M. Performance analysis of modulating retro-reflector FSO communication systems over Málaga turbulence channels. Opt. Commun. 2020, 474, 126160. [Google Scholar] [CrossRef]
- Yang, G.; Li, Z.; Bi, M.; Zhou, X.; Zeng, R.; Wang, T.; Li, J. Channel modeling and performance analysis of modulating retroreflector FSO systems under weak turbulence conditions. IEEE Photonics J. 2017, 9, 1–10. [Google Scholar] [CrossRef]
- El Saghir, B.M.; El Mashade, M.B. Performance of Modulating Retro-Reflector FSO Communication Systems with Nonzero Boresight Pointing Error. IEEE Commun. Lett. 2021, 25, 1945–1948. [Google Scholar] [CrossRef]
- Di Renzo, M.; Zappone, A.; Debbah, M.; Alouini, M.S.; Yuen, C.; De Rosny, J.; Tretyakov, S. Smart radio environments empowered by reconfigurable intelligent surfaces: How it works, state of research, and the road ahead. IEEE J. Sel. Areas Commun. 2020, 38, 2450–2525. [Google Scholar] [CrossRef]
- Di Renzo, M.; Ntontin, K.; Song, J.; Danufane, F.H.; Qian, X.; Lazarakis, F.; De Rosny, J.; Phan-Huy, D.T.; Simeone, O.; Zhang, R.; et al. Reconfigurable intelligent surfaces vs. relaying: Differences, similarities, and performance comparison. IEEE Open J. Commun. Soc. 2020, 1, 798–807. [Google Scholar] [CrossRef]
- Yang, L.; Guo, W.; Ansari, I.S. Mixed dual-hop FSO-RF communication systems through reconfigurable intelligent surface. IEEE Commun. Lett. 2020, 24, 1558–1562. [Google Scholar] [CrossRef]
- Yang, L.; Meng, F.; Zhang, J.; Hasna, M.O.; Di Renzo, M. On the performance of RIS-assisted dual-hop UAV communication systems. IEEE Trans. Veh. Technol. 2020, 69, 10385–10390. [Google Scholar] [CrossRef]
- Basar, E.; Di Renzo, M.; De Rosny, J.; Debbah, M.; Alouini, M.S.; Zhang, R. Wireless communications through reconfigurable intelligent surfaces. IEEE Access 2019, 7, 116753–116773. [Google Scholar] [CrossRef]
- Salhab, A.M.; Yang, L. Mixed RF/FSO Relay Networks: RIS-Equipped RF Source vs RIS-Aided RF Source. IEEE Wirel. Commun. Lett. 2021, 10, 1712–1716. [Google Scholar] [CrossRef]
- Cai, Y.; Qin, Z.; Cui, F.; Li, G.Y.; McCann, J.A. Modulation and multiple access for 5G networks. IEEE Commun. Surv. Tutor. 2017, 20, 629–646. [Google Scholar] [CrossRef] [Green Version]
- Khallaf, H.S.; Shalaby, H.M.; Garrido-Balsells, J.M.; Sampei, S. Performance analysis of a hybrid QAM-MPPM technique over turbulence-free and Gamma–Gamma free-space optical channels. J. Opt. Commun. Netw. 2017, 9, 161–171. [Google Scholar] [CrossRef]
- Faridzadeh, M.; Gholami, A.; Ghassemlooy, Z.; Rajbhandari, S. Hybrid pulse position modulation and binary phase shift keying subcarrier intensity modulation for free space optics in a weak and saturated turbulence channel. JOSA A 2012, 29, 1680–1685. [Google Scholar] [CrossRef] [Green Version]
- Giri, R.K.; Patnaik, B. Bit error rate performance analysis of hybrid subcarrier intensity modulation-based FSO with spatial diversity in various weather conditions. J. Opt. Commun. 2019, 40, 307–314. [Google Scholar] [CrossRef]
- Giri, R.K.; Patnaik, B. BER analysis and capacity evaluation of FSO system using hybrid subcarrier intensity modulation with receiver spatial diversity over Log-normal and Gamma–Gamma channel model. Opt. Quantum Electron. 2018, 50, 231. [Google Scholar] [CrossRef]
- Xu, G. BER and channel capacity of a deep space FSO communication system using L-PPM-MSK-SIM scheme during superior solar conjunction. Opt. Express 2019, 27, 24610–24623. [Google Scholar] [CrossRef]
- Park, J.; Lee, E.; Park, G.; Roh, B.; Yoon, G. Performance analysis of asymmetric RF/FSO dual-hop relaying systems for UAV applications. In Proceedings of the MILCOM 2013—2013 IEEE Military Communications Conference, San Diego, CA, USA, 18–20 November 2013; pp. 1651–1656. [Google Scholar] [CrossRef]
- Bayaki, E.; Schober, R.; Mallik, R.K. Performance analysis of MIMO free-space optical systems in gamma-gamma fading. IEEE Trans. Commun. 2009, 57, 3415–3424. [Google Scholar] [CrossRef]
- Yang, L.; Meng, F.; Wu, Q.; da Costa, D.B.; Alouini, M.S. Accurate closed-form approximations to channel distributions of RIS-aided wireless systems. IEEE Wirel. Commun. Lett. 2020, 9, 1985–1989. [Google Scholar] [CrossRef]
- El Saghir, B.M.; El Mashade, M.B.; Aboshosha, A.M. Performance analysis of MRR FSO communication system under Gamma–Gamma turbulence channel with pointing error. Opt. Commun. 2021, 489, 126891. [Google Scholar] [CrossRef]
- AlQuwaiee, H.; Yang, H.C.; Alouini, M.S. On the asymptotic capacity of dual-aperture FSO systems with generalized pointing error model. IEEE Trans. Wirel. Commun. 2016, 15, 6502–6512. [Google Scholar] [CrossRef] [Green Version]
- Al-Eryani, Y.F.; Salhab, A.M.; Zummo, S.A.; Alouini, M.S. Two-way multiuser mixed RF/FSO relaying: Performance analysis and power allocation. J. Opt. Commun. Netw. 2018, 10, 396–408. [Google Scholar] [CrossRef]
- Zedini, E.; Soury, H.; Alouini, M.S. On the performance analysis of dual-hop mixed FSO/RF systems. IEEE Trans. Wirel. Commun. 2016, 15, 3679–3689. [Google Scholar] [CrossRef] [Green Version]
- Miridakis, N.I.; Matthaiou, M.; Karagiannidis, G.K. Multiuser relaying over mixed RF/FSO links. IEEE Trans. Commun. 2014, 62, 1634–1645. [Google Scholar] [CrossRef] [Green Version]
- Anees, S.; Bhatnagar, M.R. Information theoretic analysis of DF based dual-hop mixed RF-FSO communication systems. In Proceedings of the 2015 IEEE 26th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Hong Kong, China, 30 August–2 September 2015; pp. 600–605. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, X.; Zhao, S.h.; Zhao, J.; Deng, B.y. On the performance of 2× 2 DF relay mixed RF/FSO airborne system over Exponentiated Weibull fading channel. Opt. Commun. 2018, 425, 190–195. [Google Scholar] [CrossRef]
- Bag, B.; Das, A.; Bose, C.; Chandra, A. Improving the performance of a DF relay-aided FSO system with an additional source–relay mmWave RF backup. J. Opt. Commun. Netw. 2020, 12, 390–402. [Google Scholar] [CrossRef]
- Yu, S.; Ding, J.; Fu, Y.; Ma, J.; Tan, L.; Wang, L. Novel approximate and asymptotic expressions of the outage probability and BER in Gamma-Gamma fading FSO links with generalized pointing errors. Opt. Commun. 2019, 435, 289–296. [Google Scholar] [CrossRef]
- Jin, M.; Liu, W.; Hao, Y.; Wu, R.; Wei, Z.; Deng, D.; Liu, H. Hybrid Dual-Hop RF/FSO Terrestrial-Deep Space Communication System under Solar Scintillation during Superior Solar Conjunction. Appl. Sci. 2022, 12, 619. [Google Scholar] [CrossRef]
- Faridzadeh, M.; Gholami, A.; Ghassemlooy, Z.; Rajbhandari, S. Hybrid 2-PPM-BPSK-SIM with the spatial diversity for free space optical communications. In Proceedings of the 2012 8th International Symposium on Communication Systems, Networks & Digital Signal Processing (CSNDSP), Poznan, Poland, 18–20 July 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Elganimi, T.Y. Performance comparison between OOK, PPM and PAM modulation schemes for free space optical (FSO) communication systems: Analytical study. Int. J. Comput. Appl. 2013, 79. [Google Scholar] [CrossRef]
- Al-Ebraheemy, O.M.S.; Salhab, A.M.; Chaaban, A.; Zummo, S.A.; Alouini, M.S. Precise performance analysis of dual-hop mixed RF/unified-FSO DF relaying with heterodyne detection and two IM-DD channel models. IEEE Photonics J. 2019, 11, 1–22. [Google Scholar] [CrossRef]
- Gradshteyn, I.S.; Ryzhik, I.M. Table of Integrals, Series, and Products; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar] [CrossRef]
- Ansari, I.S.; Al-Ahmadi, S.; Yilmaz, F.; Alouini, M.S.; Yanikomeroglu, H. A new formula for the BER of binary modulations with dual-branch selection over generalized-K composite fading channels. IEEE Trans. Commun. 2011, 59, 2654–2658. [Google Scholar] [CrossRef] [Green Version]
- Ashrafzadeh, B.; Zaimbashi, A.; Soleimani-Nasab, E. A framework on the performance analysis of relay-assisted FSO transmission systems. Opt. Commun. 2019, 450, 352–365. [Google Scholar] [CrossRef]
- Aggarwal, M.; Garg, P.; Puri, P. Dual-hop optical wireless relaying over turbulence channels with pointing error impairments. J. Light. Technol. 2014, 32, 1821–1828. [Google Scholar] [CrossRef]
- Peppas, K.P.; Stassinakis, A.N.; Topalis, G.K.; Nistazakis, H.E.; Tombras, G.S. Average capacity of optical wireless communication systems over IK atmospheric turbulence channels. J. Opt. Commun. Netw. 2012, 4, 1026–1032. [Google Scholar] [CrossRef]
- Mittal, P.; Gupta, K. An integral involving generalized function of two variables. Proc. Indian Acad. Sci.-Sect. A 1972, 75, 117–123. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, J.; Wang, X.; Jin, M.; Liu, W.; Wu, R.; Wei, Z.; Deng, D.; Liu, H. A Novel System of Mixed RF/FSO UAV Communication Based on MRR and RIS by Adopting Hybrid Modulation. Photonics 2022, 9, 379. https://doi.org/10.3390/photonics9060379
Yuan J, Wang X, Jin M, Liu W, Wu R, Wei Z, Deng D, Liu H. A Novel System of Mixed RF/FSO UAV Communication Based on MRR and RIS by Adopting Hybrid Modulation. Photonics. 2022; 9(6):379. https://doi.org/10.3390/photonics9060379
Chicago/Turabian StyleYuan, Jia, Xiaoyi Wang, Meng Jin, Wenyi Liu, Ruihuan Wu, Zhongchao Wei, Dongmei Deng, and Hongzhan Liu. 2022. "A Novel System of Mixed RF/FSO UAV Communication Based on MRR and RIS by Adopting Hybrid Modulation" Photonics 9, no. 6: 379. https://doi.org/10.3390/photonics9060379
APA StyleYuan, J., Wang, X., Jin, M., Liu, W., Wu, R., Wei, Z., Deng, D., & Liu, H. (2022). A Novel System of Mixed RF/FSO UAV Communication Based on MRR and RIS by Adopting Hybrid Modulation. Photonics, 9(6), 379. https://doi.org/10.3390/photonics9060379