1. Introduction
The reflection of light at wavelengths
is encumbered by losses to absorption and scattering, whose reduction favors few and simple (plane or spherical) optical surfaces. This design philosophy inspired the invention of two prior self-focusing grating monochromators suitable for use at grazing incidence [
1,
2,
3]. The first combined rotation and translation of a varied line-space (VLS) concave grating, while the second introduced surface-normal rotation (SNR) and initially employed a constant line-space (CLS) concave grating. To date, these have been the only single-element solutions which remain “in-focus” (no spectral aberration linear
versus aperture) with scanned wavelength, yet employ slit positions and ray directions fixed in the direction of dispersion. The endpoint in this progression towards minimization would be reflection from a single
plane grating surface, which can exhibit near-invariance of the focal length with graze angle and provide access to the most accurate fabrication methods. These include float-polishing and Silicon crystal cleaving to produce atomically-smooth plane surfaces and short-wavelength lithographies which offer a new generation of flat-substrate gratings having ultra-low scatter and unconstrained two-dimensional line patterns [
4].
Existing fixed-slit plane grating monochromators require additional (mirror) reflections to focus the incident beam or to maintain this focus as the grating is rotated to scan wavelength. For example, the classical Czerny–Turner design is theoretically free of geometrical aberrations, but requires two concave (in principle, parabolic) mirrors for collimation and refocusing [
5]. Designs in which the grating is illuminated by uncollimated light require some form of effective aberration correction to maintain fixed slits upon rotation of the grating, of which five distinct geometric solutions have previously been devised: (I) a CLS grating plus a fixed concave (ideally, elliptical) mirror and a rotating plane mirror [
6]; (II) a CLS grating plus a rotating concave (spherical) mirror [
7]; (III) a VLS grating plus a fixed concave mirror [
8,
9], spherical or otherwise; (IV) a VLS grating plus a rotating-translating plane mirror [
10]; and (V) a CLS grating rotating about its surface normal plus a fixed (ideally elliptical) concave mirror [
3]. The cited references are the original disclosures, with the defining (minimum) optical geometries and characteristic imaging properties being unchanged in numerous reformulations, optimizations, augmentations, rebranding and other derivatives.
Presented here is a new monochromator geometry, in which a self-focusing VLS grating scans wavelength between slits at fixed distances and horizontal deviation angle, without the need for other optics. This paper reports the detailed imaging characteristics of the basic (astigmatic, single-element, plane grating) configuration, particularly the spectral resolution as a function of aperture and scan range. In
Section 2, an approximate light-path formulation provides a cogent algebraic and geometric understanding of the new focusing principle (first degree correction) and derives an advantageous conjugate distance ratio to correct the spectral aberration of second degree.
Section 3 introduces a rigorous general light-path formulation and
Section 4 applies this to obtain the expansion equations for the present dual-rotation plane VLS grating. As analyzed in
Section 5, these equations provide to an exacting degree the focusing condition, the required tilts of the object (or entrance slit) and image (or exit slit) and the lateral ray aberrations in both directions. In
Section 6, these spatial aberrations are converted to the geometrical spectral resolution and are exemplified using the dimensional parameters of an ultra-high resolution soft X-ray monochromator. In
Section 7, independent simulations (numerical raytracings) are performed and quantitatively compared to the light-path calculations. As the present introductory work lays the theoretical foundation on which subsidiary performance characteristics may be added,
Section 8 briefly indicates some prospects for future practical enhancements. The new results disclosed in this paper, including the proposed geometry and two precise methods of deriving the component geometrical aberrations, are summarized in
Section 9.
2. The Basic Scheme
Figure 1 illustrates a minimal astigmatic configuration of the proposed optical geometry. The coordinate systems are Cartesian and right-handed, with the general frame fixed in the laboratory being (
). The object and image plane frames are also fixed, being perpendicular to the plane of the figure and using coordinate systems
and
, respectively. The coordinate system of the grating frame is
, with its origin at the grating pole (P) and the
-axis being coincident with the laboratory
-axis (pointing towards the viewer). On the grating surface, G is a general point
and E is at an extreme corner
of a pole-centered rectangular aperture. The distances
and
are measured along the principal incident and diffracted rays, which intersect at the grating pole. There the principal angles of incidence (
) and diffraction (
) are measured relative to the grating tangent plane. Their sum is the in-plane angular deviation
and their difference equals 2
. Thus
and
is the effective graze angle.
At an initial wavelength
, the grating surface normal
is oriented at an angle
relative to its zero order direction (for which
, the grooves are oriented “in-plane” (at
, thus parallel to the sagittal
-axis) and self-focusing is provided by VLS positioning of the grooves. The object point
, the grating pole P and the image point
for
define the “horizontal” plane of
Figure 1, whose intersection with the grating tangent plane at its pole forms the meridional
-axis. The “Gaussian” image plane is shown, which is at the focal distance
for which the resulting horizontal defocus (first-degree) term
at
. As shown in
Figure 1 and
Figure 2b, the (horizontally) “paraxial” image point
shall refer to the intersection of the exiting principal ray (for any
) with this image plane, being independent of the pupil coordinates (“non-aberrant”).
The scanning to longer wavelengths (
) consists of a conventional rotation (about the
-axis) to the angle
, coordinated with a second (and larger) rotation to the angle
about the grating surface normal (
-axis). If (as illustrated in
Figure 1) the first rotation axis lies on the grating surface, it intersects a stationary grating pole which views the in-plane object point (
) and its paraxial image point (
) along principal ray directions whose projections onto the horizontal plane are fixed. The
-axis rotation results in a strong defocusing of the spectral width which, as will be shown, may be canceled by the defocusing of opposite sign resulting from the
-axis rotation.
Figure 1.
The Single-Element Plane Grating Monochromator (SEPGM), comprising (minimally) one grazing reflection. Coordinated on-center rotations and of a VLS grating maintain precise self-focusing as the wavelength is scanned. Projection is onto the horizontal plane, except the angle label for is viewed from a slight elevation for clarity. The extreme ray aberration (separation of the image points) is shown greatly exaggerated.
Figure 1.
The Single-Element Plane Grating Monochromator (SEPGM), comprising (minimally) one grazing reflection. Coordinated on-center rotations and of a VLS grating maintain precise self-focusing as the wavelength is scanned. Projection is onto the horizontal plane, except the angle label for is viewed from a slight elevation for clarity. The extreme ray aberration (separation of the image points) is shown greatly exaggerated.
For generality and clarity, most equations will use dimensionless variables in italics, where the scale factor is r. These include the conjugate distance ratio , the meridional pupil coordinate , the sagittal pupil coordinate , the grating ruled width coordinate , the object plane horizontal coordinate and vertical coordinate , the image plane horizontal coordinate and vertical coordinate and the rotated image plane coordinates (in the spectral or “slit width” direction) and (in the “spatial” or “slit length” direction). By convention, the meridional plane is “horizontal” and the sagittal plane is “vertical”, though this directional labeling need not correspond to the ground-level orientations of either the physical instrument or the figures drawn in this paper. Meridional and sagittal shall refer to the positions and , respectively) on the grating surface, whereas horizontal and vertical shall refer to the lateral coordinates ( or and or , respectively) within the object or image planes. “Longitudinal” shall nominally refer to the direction of ray propagation. The meridional projection of the physical distance travelled by the principal ray is , which is the nominal length of the monochromator relative to the object point.
As the spectral imaging properties at grazing incidence are largely determined by the dimensionless ratio
, this variable will appear in the light-path equations rather than the rotation angle
. Conversion between
and
is given by
and
. The European sign convention is adopted, designating the inside spectral orders (
,
) as negative (
) and the outside orders (
,
) as positive (
). Assuming no horizontal focusing optic follows the grating, and the monochromator transmits the scanned wavelength by use of a spatial filter (an exit slit), the grating image must be real (
). This results in
when the grating is mounted in a diverging incident beam (a real object,
), and
in the case of a converging incident beam (a virtual object,
). The former corresponds to a self-focusing monochromator, for which the linear axes arrows in
Figure 1 and
Figure 2 point to positive dimensionless values. However in the latter case (a virtual object), the negative value of the scale factor r results in negative dimensionless values in the directions of these arrows.
2.1. The Standard Light-Path Formulation
The wavefront path length F is the sum of the physical path lengths (
and
) and the interference shift of
between
N grooves, where
is the spectral order and
is the physical value of the wavelength. As a powerful tool in the development and performance analysis of optical designs, the path lengths and groove number are usually mathematically de-composed by power series expansion in the pupil coordinates, providing (in dimensionless units):
where
is the dimensionless wavelength variable given a physical line spacing
at the grating pole. In what shall hereinafter be called “the standard formulation”, the path-length coefficients derive from the series expansion of the distances to conjugate points (O and I) which have no dependence upon the pupil coordinates
or
. In particular, I is equated to the paraxial image point
. Thus, the series expansion yields equations for
and
which depend only upon parameters at the grating pole, namely the grating orientation (
), its position (
) relative to the object and image points and the shape of its surface (e.g., its radius of curvature).
Employing Fermat’s principle, the image plane lateral ray positions
and
are also power series obtained by differentiation of Equation (1) w.r.t. the grating pupil coordinates:
where the inclination factor
(given more precisely later). In
Section 3, the above standard formulation of the light-path aberrations is shown to be mathematically flawed, and is replaced by a rigorously correct theory. However, to introduce the essential geometrical principles underlying the new design, this complication is temporarily neglected and a concise initial analysis is presented based on Equations (1)–(3) and other simplifying (though not flawed) approximations. For brevity, functional dependences upon the pupil coordinates and the wavelength shall hereinafter be understood without their explicit notation.
The power series terms of first degree will be referred to as de-focus (), astigmatism (), horizontal (sagittally-induced) image tilt () and vertical (meridionally-induced) image tilt (). Though semantical distractions may be discouraged by referencing the higher-degree terms according to only their (i, j) subscripts and lateral direction, the commonly accepted descriptions (based largely on the image shape) will also be used when this facilitates the discussion. Thus, “meridional coma”, “horizontal coma” or simply “coma” is the (3,0) term (), “sagittal coma”, “astigmatic coma” or “astigmatic curvature” is the horizontal (1,2) term (), “spherical aberration” is the (4,0) term () and “mixed spherical aberration” is the horizontal (2,2) term ().
2.2. Surface-Normal Rotation Transformation of the Varied Line-Space Coefficients
A varied line-space (VLS) grating is a design in which the groove positions are relatively unconstrained yet possess sufficient symmetry to permit a mechanical ruling. The most common of these symmetries is where the grooves are straight and parallel, thus the groove number (
N) may be expressed as a 1D power series in the ruled width coordinate
:
where
and
(for
) are the dimensionless VLS ruling coefficients. Equation (4) corresponds to a relative local groove density
and to dimensional coefficients
)
.Figure 2a shows that a surface normal rotation
(positive = clockwise viewed from above) of ruling coordinate
relative to the grating meridional coordinate
results in the transformation
. The groove number coefficients
in the grating frame (
), as used in Equation (1), are thus obtained by that substitution in Equation (4):
where
for pure meridional terms (
);
for pure sagittal terms (
);
for the mixed terms (1,1), (1,2), (2,1), (3,1) and (1,3);
for the mixed term (2,2) and where
. The (
,
0) terms provide a meridionally-projected groove density of
where
revealing that the relative magnitudes between successive coefficients have decreased by
. This results in diminished focusing power (
) and progressively smaller correction of the higher-degree aberrations (
). Additionally, Equation (5) reveals that nonzero values of
create new coefficients of sagittal (
) and mixed (
) powers. These new terms result in significant 3D imaging characteristics, including image tilts and the introduction of a dominant mixed aberration.
Figure 2.
(
a) The grating
plane viewed from above (+
), detailing the rotational transformation of the varied line spacing between the ruling axis and the meridional axis for any point G on the grating surface, as given by Equation (5); (
b) Frontal view (as seen by a distant observer upstream of the entrance slit), detailing the slit rotations in the object and image planes. The paraxial (non-aberrant) deflection out of the meridional plane is shown both originating from the center of the entrance slit (
_______) and originating from one end of this slit (
__ __ __ ). The (dimensionless) length of the principal ray is
. The presence of aberrations, notably astigmatism, for the extreme non-principal ray (
__·
__) results in the lateral image position summed from all the power terms given in
Section 4. Slit rotation angles
(about
) and
(about
, given in
Section 5, are relative to the grating frame. Thus, an equivalent optical geometry can maintain the entrance slit parallel to
in the laboratory frame, but rotate the grating and exit slit frames by –
about
.
Figure 2.
(
a) The grating
plane viewed from above (+
), detailing the rotational transformation of the varied line spacing between the ruling axis and the meridional axis for any point G on the grating surface, as given by Equation (5); (
b) Frontal view (as seen by a distant observer upstream of the entrance slit), detailing the slit rotations in the object and image planes. The paraxial (non-aberrant) deflection out of the meridional plane is shown both originating from the center of the entrance slit (
_______) and originating from one end of this slit (
__ __ __ ). The (dimensionless) length of the principal ray is
. The presence of aberrations, notably astigmatism, for the extreme non-principal ray (
__·
__) results in the lateral image position summed from all the power terms given in
Section 4. Slit rotation angles
(about
) and
(about
, given in
Section 5, are relative to the grating frame. Thus, an equivalent optical geometry can maintain the entrance slit parallel to
in the laboratory frame, but rotate the grating and exit slit frames by –
about
.
![]()
2.3. The Principal Ray Terms
These are not aberrations (pupil-dependent), but are the horizontal
and vertical
image coordinates, whereby the wavefront from this point to the grating pole is stationary. Using Equation (1), this condition (
) is expressed as:
The leading terms in Equations (7) and (8) are the differential phase shifts, namely
and
as given by Equation (5). The middle terms are the differentials of the object distance
/r about
, obtained by simple trigonometry using
Figure 1 and
Figure 2b (or Equations (32)–(34)) with
being a point along a line (e.g., an entrance slit) tilted by an angle
from the vertical. The last terms are differentials of the image distance
about
, also obtained trigonometrically (Equations (35)–(37)) with
being the paraxial image point. Simultaneously meeting Equations (7) and (8) yields quadratics with the following series solutions:
where
and
. Equation (9) is a “law of sagittal reflection” with a vertical object position (
) and generalized to include a surface-normal rotation angle (
). As illustrated in
Figure 2b, the latter causes a deflection of the image center out of the horizontal plane and is dominated by the
term, which scales linearly with wavelength. A possible method of canceling this (undesired) movement is proposed in
Section 8.1, however this term will be included in all the aberration equations to be derived in
Section 3,
Section 4 and
Section 5. Equation (10) is a generalized “grating equation” for the in-plane object point (
, including both the
projection of the groove spacing and the fine-correction factor
. The result is essentially exact agreement with the numerical raytracings (discrepancy
10
−13 radians). The last equality in Equation (10) is a five-term series solution which retains an accuracy of
4.2 × 10
−11 radians. Alternatively, if the
term is excluded, Equation (10) is quadratic in
with the following simple solution being accurate to
3.2 × 10
−9 radians (~ 0.036 microns at the grating focal distance of ~ 11 meters):
In the absence of groove axis rotation, Equations (9) and (10) are found to collapse to the results reported previously for a pure surface-normal rotation monochromator [
2,
3], namely
and
. Equation (11) is the horizontal image position of off-plane points
along an entrance slit, revealing that a vertically displaced object point (
results in a horizontally-displaced image point (
). The term linear with
corresponds to image tilt, while the quadratic term accounts for image curvature of a straight slit; further analysis is given in
Section 5.4 and
Section 5.5.
2.4. Pure Meridional Aberrations and their Graze Angle-Invariant Approximation
Using the paraxial horizontal image position (
to construct the path lengths and neglecting the effect of off-plane vertical image positions (
), the grating Equation (10) simplifies to
and the lowest three meridional-only (
) wavefront terms of Equation (1) may be written concisely in the following form:
where
and
. At grazing angles (
15°), the small-angle approximations
and
) provide accuracies
1%. This yields
,
and a simplified (
-invariant) expression for the wavefront:
at nonzero spectral orders (
). At the initial wavelength (prior to scanning),
and
and all horizontal aberrations vanish (
) by choice of the following VLS coefficients:
As the geometrical imaging properties of VLS plane gratings contrast with intuitions fostered in classical optics, it is emphasized that the required coefficients
are (for all
) nearly independent of
at grazing incidence, with this invariance becoming (asymptotically) exact as
approaches zero. This is opposite to the behavior of classical (curved surface) methods of focusing, which are strongly dependent on a precise
at grazing incidence, and become increasingly so as
decreases. As with the prior VLS self-focusing plane grating geometry (IV in
Table 1), this invariance enables a given grating to provide aberration correction at any graze angle given fixed values for
,
. This offers a flexibility in graze angle and wavelength coverage not available with concave gratings.
For the author’s original VLS plane grating converging-beam geometry (III in
Table 1), the conjugate distance ratio is
, simplifying Equation (15) to
(dimensionally, this is
). Though this grating mount requires a horizontal focusing mirror to provide the incident converging beam, Equation (14) with
reveals the yet stronger
-invariance whereby the aberration correction is also independent of
. This allows the angles of incidence and diffraction to be changed
independently (while still maintaining the fixed focal length
) given only that the dimensional factor
is unchanged. For example, the grating may be configured with this mirror into an erect-field (varied
) spectrograph [
8] with fixed
, a constant-deviation (fixed
) monochromator [
9] or any other desired combination of the 2 angles. A derivative of this geometric class (
i.e., having unaltered imaging properties) thus provides a fixed difference
for “on-blaze” diffraction efficiency to a moveable slit (or add a conventional rotating plane pick-off mirror to redirect this
to a fixed slit).
However, when
(
), the focal length is a strong function of
. This sensitivity is a general characteristic of a self-focusing grating geometry at grazing incidence, whether it be a classical or VLS grating, and whether the surface is plane or curved. In contrast, it has been previously shown [
2,
3] that a surface-normal (
) rotation does not change the focal length of a CLS grating, given fixed meridional angles and a fixed axis-symmetric (e.g., plane or spherical) surface curvature. However, in the case of a VLS grating, an
-rotation angle diminishes the interference term by the factor
, as seen in Equation (14). This would result in an under-correction of all aberrations initially corrected at
. The new focusing condition presented here arose by considering if this under-correction could balance the strong defocus induced by the change to
upon a conventional (groove axis) rotation.
2.5. The New Focusing Condition
Combining Equations (14) and (15) in the case of no defocusing (
) yields:
As
, Equation (16) provides a mathematical relationship between the two rotation angles (
and
). However, this is of no physical relevance unless
. Fortuitously, this is always the case, as may be seen by making the substitution
. Equation (16) is then rewritten as
. For negative spectral orders,
and a scan towards longer wavelengths requires
. Since
in the present (self-focusing) geometry, the value of this equation must be between 0 and +1. By the principle of optical reversibility, this must also be the case for positive orders, for which the photon reverses its direction of travel and
becomes 1/
. The potential to cancel the defocusings induced by each of the 2 rotations (the 2 terms in Equation (14)) may also be understood geometrically. As illustrated by the first animation sequence of
Figure 3, scanning towards longer wavelengths (shown visually going from “blue” to “orange”) by a
-axis rotation always
decreases the focal length. However, due to the cos
reduction in VLS focusing power, the
-rotation (away from
) always
increases the focal length.
Though Equation (16) relies upon the small-angle approximation and also accounts only for pure horizontal defocusing (the effect of image tilt is addressed in
Section 5), it confirms the physical relevance of this scheme. Additionally, it provides some insight by considering the case of unit magnification at
. By use of Equation (16) and the small-angle approximation to the generalized grating Equation (10), the in-plane rotation and the surface-normal rotation are each seen to increase the scanned wavelength by the same amount. In the more general cases of
or
(away from
), though the contributions are not equal they are comparable, thus the scanning range (
) scales approximately as the square of that provided by each rotation. Due to this (second) fortuity, the proposed dual rotation is not only the key to a focused single-element plane grating monochromator, but also enables a wider scan in wavelength than does a single rotation for the same change in
(the latter affecting grating imaging, magnification and efficiency). For the monochromator parameters exemplified in
Section 2.6, a factor 8 in scan range results from a factor 2.54 due to the in-plane rotation (changing
by only a factor of 1.89) times a factor 3.12 due to the surface-normal rotation.
Figure 3.
Concerted rotations of a varied line-space (VLS) self-focused plane grating about two axes provide in-focus scanning of the wavelength (please see the animation of this figure in the
supplementary material). Tilt and off-plane deflection of the image are not shown here. Slits may be placed at the object and image.
Figure 3.
Concerted rotations of a varied line-space (VLS) self-focused plane grating about two axes provide in-focus scanning of the wavelength (please see the animation of this figure in the
supplementary material). Tilt and off-plane deflection of the image are not shown here. Slits may be placed at the object and image.
2.6. Two-Point Coma-Correction: Optimization of the Conjugate Distance Ratio
With defocusing eliminated at all scanned wavelengths, the next higher degree aberration to be considered is given by in Equation (1). At grazing angles, this aberration is typically large and thus determines whether a system which is technically “in-focus” () can in fact deliver high resolution at a usable aperture. It is tempting to first consider unit magnification , which would eliminate this aberration in the absence of a varied line-density term . This is similar to the classical concave grating being free of this aberration on the (unit magnification) Rowland circle. Setting 0 would also remove this interference term from Equation (14) and thus avoid its multiplication by cos2 (which would re-introduce coma upon surface-normal rotation). However, because and are changing in opposite directions as the wavelength is scanned in the first (groove axis) rotation, the resulting change in ρ ~ β/α allows 1 at only one wavelength. Even if this correction wavelength is optimally selected (by choice of alone) to be near the center of the scanned spectrum, the growth in coma away from a single correction point is rapid, making it ineffective for all but a very narrow wavelength range.
The high level of coma correction required to maintain ultra-high spectral resolution over wide scanning ranges is realized by determining optimal values for the two free parameters (
and
) available from Equation (14) when
to correct
at two wavelengths. In general, the simultaneous solution is a quartic, however it collapses to a quadratic if the two correction points are (tentatively) chosen to be at
(cos
) and
60° (cos
), resulting in the following closed-form solution:
The corresponding is obtained by setting in Equation (14) at and . Minimization of over the scan range is then obtained by adjusting both and from these tentative values, such that the two correction points straddle the spectrum center and are symmetrically inset from the edges. In this case, reaches the same maximum at the extreme ends of the range and at a wavelength between the 2 correction points. Such optimization for a scanning range of ~ 8 ( ~ 71.25°) resulted in 1.275 and 1.08 (if the scan range were reduced to ~ 60° ( ~ 3.6), optimization of this coma-correction would yield and 1.04). This and the preceding meridional analysis provide the following set of dimensionless parameters for an example soft X-ray SEPGM: 2 6°, 1.4458939, 3.699998982,1.432972878, 0.8378590, 1.28655, where results from using Equation (14) to cancel spherical aberration () at , thereby minimizing its average magnitude over the three-octave scan range.
2.7. A Classification of Plane Grating Geometries
The simple form of Equation (14) also enables a concise comparison of the fundamental differences between various aberration-corrected plane grating geometries. In
Table 1, the present class is listed alongside the previous five, comparing the defining categories of the
minimum number of reflections (grating + mirror(s)), the grating line density function (the VLS coefficients
), the functional value of
defining the grating mount, the grating parameter which is fixed upon a focused (
0) scan of wavelength and the corrected horizontal aberrations (
0).
Table 1.
Plane grating aberration-corrected monochromators with fixed slits.
Table 1.
Plane grating aberration-corrected monochromators with fixed slits.
| Geometry | Optics (min) | Approx. VLS (i2, 3, 4) | Grating Mount (a) | Fixed Parameter(s) | Corrected Aberrations |
|---|
| I. Petersen [6] | 3 | | | | |
| II. Lu [7] | 2 | | | r′ only (b) | |
| III. Hettrick [9] | 2 | | −1 | (c) |
|
| IV. Harada [10] | 2 | | | |
(
( |
| V. Hettrick [3] | 2 | | | | |
| VI. This Work | 1 | | | (e) |
( |
3. A Rigorous Theory of Light-Path Expansion
The purist of wave aberration methods [
11] constructs the physical light-path from object point to actual (floating) image point and employs Fermat’s principle by setting the wave aberration differential to zero for the sum of all terms. This approach does not evaluate the individual aberrations, other than those of lowest degree in each direction (
i.e., defocusing and astigmatism). This avoids the difficult task of constructing an accurate reference wavefront, and is convenient for optimizing (“fine-tuning”) the parameters of existing geometries by minimizing the numerical variation in the image point position as the incident ray wanders over the pupil surface. Unfortunately, this provides little intuitive information conducive to algebraic or geometrical understanding, and is therefore not suited to the development or qualitative improvement of new geometries. Indeed, even the (numerical) data from the precise raytracings performed as part of the present work (
Section 7) are mathematically reduced to extract the individual coefficients of the algebraic power series, and are thus more convenient for basic design development than is the total wave aberration formalism.
More insight and fundamental progress in optical design is facilitated by isolating and controlling successive expansion terms
(and
) of the lateral ray aberrations. Especially in the case of large mixed terms (neither
i nor
j being zero), this requires a more rigorous light-path formulation than previously presented in the literature. Though complicating the derivation, the resulting separation of the individual terms provides a precise and consistent analytical method indispensible to the development of new designs. In this section, the general equations are given for rigorously expanding the lateral aberrations of a reflection grating. In
Section 4, these will be simplified for the case of a plane grating and used to obtain the explicit aberration terms for the basic astigmatic configuration of the new monochromator geometry.
3.1. Flaw in the Standard Theory
Relative to any chosen point in space, the optical wavefront (a surface of constant phase) is a (physically) measureable quantity, as is the lateral image position of a ray diffracted from any point on the pupil. However, their expansion into power series component terms is (though very useful) only a mathematical abstraction. In expanding the image path length relevant to an individual ( or ) lateral aberration term, a consistent formulation requires the use of a correspondingly abstract reference image point. This must be chosen to remove the other lateral aberration terms which, upon expansion and pupil differentiation of the light-path, may erroneously form the same power dependence as the intended term. Only in this way do the (mathematically-constructed) terms become separate incremental components, the sum of which is the total (physical) aberration.
In general, the reference point depends not only upon the (
i, j) term in the light-path function, but also upon whether a given (
i, j) term is differentiated relative to the meridional pupil coordinate to determine (via Fermat’s principle) the
lateral ray position or relative to the sagittal pupil coordinate to determine
. Thus, a single light-path function may not be expanded (e.g., into a power series) applicable to both directions. Nonetheless, the individual derivatives (
) of the appropriate functions may be expanded for rigorous determination of the separate lateral ray positions, as given in
Section 3.3.
Unfortunately, the standard formulation (briefly summarized in
Section 2.1) systematically employs only the paraxial image as the reference point (in wavefront terminology, it is usually asserted to use the “Gaussian reference sphere”). The resulting expanded (inferred) power terms are therefore subject to cross-contamination, providing incorrect results for both the individual aberrations and their sum, the latter thereby not matching the actual (measurable) lateral ray position. In the analysis of classical optics, such contamination is usually small, due to these designs either being rotationally symmetric, having an in-plane dispersion geometry, or being anastigmatic and (ideally) absent of second-degree (e.g., meridional coma) lateral aberrations, and is neglected. An historical exception appears to have been in determining the mixed power term of astigmatic coma (
), where Beutler [
12] correctly added the aberration of astigmatism (
) to form the image reference point for a concave grating geometry (particularly on the Rowland circle). Though such special consideration of the lowest-degree vertical aberration is consistent with the image reference being “paraxial”,
it contradicts the assertion that the wave aberration is evaluated at the (single point) intersection of the principal ray with the (horizontal) Gaussian image plane [
13]. As astigmatism separates the horizontal and vertical image planes, the actual wavefront becomes toroidal. Moreover, inclusion of this one aberration in the reference does not provide a correct determination of all the lateral aberrations.
In the more general sense, this approach leaves uncorrected an underlying problem that the standard formulation is based on the methods developed for the treatment of normal incidence and rotationally symmetric classical optics systems. For such, the horizontal and vertical image planes coincide, neither astigmatism nor coma exist when using an on-axis object point and a single light-path function may be used to determine the lateral aberrations in both directions. Using such methods, the lateral terms which can dominate grazing incidence and asymmetrical systems are not systematically removed from the expansion of higher-degree aberrations. The neglected terms include all of the pure meridional aberrations
(such as horizontal coma) and the mixed terms
(in which both
i and
j are nonzero). Though a comprehensive discussion of the errors resulting from widespread use of the standard formulation is beyond the scope of this paper,
Appendix A shows that the standard result for the spherical aberration term of even a (classical) spherical mirror is incorrect at non-unit magnification. This illustrates that the new formulation yields more accurate results even in the absence of surface-normal rotation, varied line-spacing, grazing incidence or even grating diffraction.
The light-path expansion theory developed below reveals that the isolation of different power series terms is generally more complex than previously explained by use of paraxial reference points. The new formulation employs a pupil-dependent (“aberrant”) reference image position tailored to the expansion of each power term, and a Fermat differentiation of infinitesimal pupil variables ( and ) which are independent of this image position and the pupil coordinates ( and ).
3.2. The Reference Path Lengths
The reference path-lengths are
(
) as the distance between a reference point (
) in the object plane and the grating pupil coordinate (
), and
(
) as the distance between (
) and a reference point (
) in the image plane. The general equations in this section include a grating surface of revolution with a radius of curvature
at the pole, where
is concave (positive focusing power) and
is convex (negative focusing power). In the below equations,
provides the exact results for a paraboloidal surface, while a spherical surface is treated (correct to the 5th degree in path-length) by substituting
. Given the coordinate systems shown in
Figure 1 and
Figure 2:
in which
is the sum of the squares of the two lateral (”transverse”) segments:
where,
In Equation (19), is the vertical distance of an object point from the horizontal (meridional) plane. The terms and have no dependence upon the grating pupil coordinates and thus define a source point whose emitted rays fill the grating aperture. Making a function (or vice-versa) can define the two-dimensional curve on which such points may lie in the object plane. For example, a parabolic entrance slit illuminated by a spatially diffuse upstream source may be specified by where is the slit’s tilt angle towards the -axis and is its curvature radius at . In the case of a linear slit 1/; if is also zero, then the slit is aligned with the vertical -axis. Equations (19) and (20) also allow power series terms () to accommodate dependences between the object point position and the grating pupil position. For example, consider a vertically aligned entrance slit being illuminated by a horizontally aligned linear source at an upstream distance Y. This longitudinal separation of the effective horizontal and vertical object conjugate planes results in ). Nonzero values for or can also be constructed to include the geometrical aberrations of optics preceding the grating (or the object plane), e.g., those of a mirror which reduces the (vertical) astigmatism and/or provides horizontal re-focusing of a distant source.
The coordinate system of the image plane has as its origin the principal ray position for the in-plane configuration, namely where the object point is at
) and where the grating rotation angle
0. However, all other object points and all nonzero values of
will result in an image position which does not strike this origin in one or both lateral directions. Therefore,
and
), where the superscript
denotes the component due to aberrations. In the case of the minimal astigmatic configuration of the SEPGM geometry (whose detailed expansion is given in
Section 4), the aberration terms assume an object at
). This constrain
for all rotation angles, thus
contains only the aberration terms (
). However,
when
as given by Equation (9). Thus,
is the sum of an aberration component (
) and the off-plane position of the principal ray.
3.3. Fermat Derivation of the Lateral Ray Aberrations
Mathematical separation of the individual aberration power terms requires strict adherence to Fermat’s principle, which specifies the light-path (
i.e., the direction along which the optic provides constructive interference) to be the one for which the phase is stationary relative to small offsets in the pupil coordinates. Deviations from this can be converted to the lateral ray deviations (aberrations) from a reference image point. In mathematical terms, the first derivative must be taken relative to the pupil coordinates,
while maintaining a fixed reference image point. To insure a proper formulation, it is therefore convenient to add small offsets (
and
) to the two pupil coordinates (
and
) appearing in Equations (19) and (22), but not to the pupil coordinates appearing in Equations (20) and (23). The Fermat derivatives of Equations (18) and (21) are then taken with respect to
and
. In the absence of these effectively separate variables,
i.e. if one simply differentiated with respect to
and
, any
aberration (a ray position which depends on the pupil coordinates) included in the construction of the reference image point would move that point during the differentiation, improperly distorting the (spherical) reference wavefront. The same situation occurs in the presence of an aperture-dependent object position (discussed in
Section 3.2).
The proper formulation of Fermat’s principle thereby yields:
The reference coordinates and in the above equations are each sums of all the other lateral ray aberration power terms and , respectively, which when combined and expanded with the other terms give rise to the desired power term.
The reciprocal radicals in Equations (24)–(27) are to be expanded by Taylor series (
to isolate the different power terms. The horizontal lateral aberration
is obtained by Fermat conversion of the wavefront error by summing the
terms, retained in the
-derivatives of the three path-length components (
N, A and
B), and multiplying by the “lever arm” distance to the image :
where,
and
is the inclination factor due to an off-plane image coordinate of
. As
is thereby the distance between the optic center and the paraxial image point, this conversion is accurate to order
, as given by Born and Wolf [
14]. The trailing term in Equation (29) accounts for the linear variation of 1/sin
with
when the optical surface is not flat (
).
For the vertical ray aberration (summing the
terms), the inclination factor
enters a second time at the exit pupil (in the same manner as the 1/sin
factor in the horizontal equation) and a third time in projecting the transverse aberration (normal to the direction of propagation) onto the image plane. This results in a net factor of
h3 , as employed below:
where,
The above general equations provide the foundation for an accurate mathematical decomposition of the lateral ray aberration into power terms (horizontally) and (vertically). The improvement over the standard formulations lies in the systematic inclusion of all other relevant (i.e., able to form expansion terms of power (horizontally) or (vertically)) aberrations and in constructing the reference image point ( for calculation of the geometrical path lengths used in determining both and .
One could integrate Equations (29) and (31) to form “wavefront” (path-length) coefficients; simply being Equations (2) and (3) in reverse, yielding
for the horizontal direction and
for the vertical direction. Though such an exercise adds no new information, it confirms that the individual terms in the decomposition of the wavefront (and thus lateral ray positions) are mathematical abstractions. If they were physical quantities, then
and
would not “know” the direction in which they may be differentiated and thus would be equivalent (
). However, for the present astigmatic design, the required reference point (
) for
is different from that for
at all (
i, j) pairs (see
Table 2). Thus,
for all
i and
j (when
i + j 1), indeed with the ratios
calculated to be of significant magnitude (10
2 to 10
3).
5. Manipulation and Analysis of the Ray Aberrations
5.1. Horizontal Tilt (Sagittally-Induced)
The lowest-degree mixed horizontal aberration created by the surface-normal rotation is
(Equation (42)) resulting from the nonzero value of
in Equation (5). Noting the linearity of
with the sagittal pupil coordinate
, this is simply a
tilt of the astigmatic image by the angle
/
) about the image coordinates (0,
Employing the expansions given in Equations (41) and (42):
where a negative value is counter-clockwise for an upstream observer. As in the case of the single-rotation “pure” SNR monochromator [
2,
3], a sympathetic rotation of the exit slit by
about
will cancel the rotated value of
and thus
. A stationary rotation axis
would require adjusting the focusing condition (not detailed here) to include the horizontally offset image center intercepting the slit.
5.2. Vertical Tilt (Meridionally-Induced) and the Rigorous Focusing Condition
Given the above astigmatic image tilt, the lowest-order mixed vertical aberration
presents the interesting condition that a perfect horizontal focus for meridional rays (
) would be extended into a vertically extended line, projected upon the tilted slit as a defocus normal to its length (multiplied by tan
). In effect, the vertical aberration due to the meridional rays induces a second tilt angle
. Employing Equations (43) and (44):
The solution is to purposely “defocus” the grating horizontally to force equality of the two tilts (Equations (55) and (56)). Making the following substitutions:
,
and
constrains the single parameter
to provide the following rigorous focusing condition:
accurate to order
, where
is a small quantity (of order
) and where
at present (the terms involving
are derived in
Section 5.3). If one drops the
and
terms, a quadratic emerges whose closed-form root
:
Note that the linear approximation to Equations (57) or (58) has the even simpler solution , being a pure horizontal focus ( independent of the image tilt. In the small-angle approximation, this is equivalent to that previously given by Equation (16).
The final solution for is obtained by numerical iteration of Equation (57) using the above “initial guess” of or . Even at the maximum rotation angle of , only a small adjustment in is needed to provide the desired condition . If using as the initial guess, the residual is negligible (10−12) after only 2 linear interpolations, refining by 0.064°.
Equalizing the two image tilts of a point source is critical to providing fine spectral resolution at high rotation angles. In the absence of such a constraint (i.e., if the horizontal defocus alone is corrected), the net resolution of the example monochromator is calculated to degrade by a factor 6 at
5.3. Balancing of Spherical Aberration and Defocus
Though typically a very small correction, a fine adjustment in
may also be employed to partially balance the spherical aberration term. This is analogous to the classical technique of offsetting the detection plane from the Gaussian (
) focus to the plane of “least confusion” which minimizes the sum of these two lateral horizontal aberrations of odd power (
. Unlike the defocus term, the aberrations of high power (including the
term) vary only slowly with
(except near their correction points). This allows the
term to be evaluated at the root of Equations (57) or (58) and to then be treated as a constant to be added to
for a refined determination of the meridionally-induced tilt angle (
) given above. For example, evaluating
at
from Equation (58), the full focusing condition shown in Equation (57) employs a nonzero value for
and the following constant approximated by the dominant lowest-order (
) term of Equation (51):
An optimized balancing of defocus and spherical aberration employs
of the semi-meridional aperture, resulting in the root of
changing by
−0.0067° at the scan wavelength of
, and the extremum convolution of all the aberrations decreasing by
30% (cf.
Figure 6g,h). More substantial improvements are expected at larger apertures, where spherical aberration is increasingly dominant over the lower-power aberrations.
5.4. Rotation of the Entrance Slit
Given an entrance slit at angle
to the vertical, its image tilt
derives simply from Equations (9) and (11):
To maintain focus along the slit length, this must be set equal to the image tilt for a point source from Equation (55). Thus,
, constraining
as a function of the scan parameters:
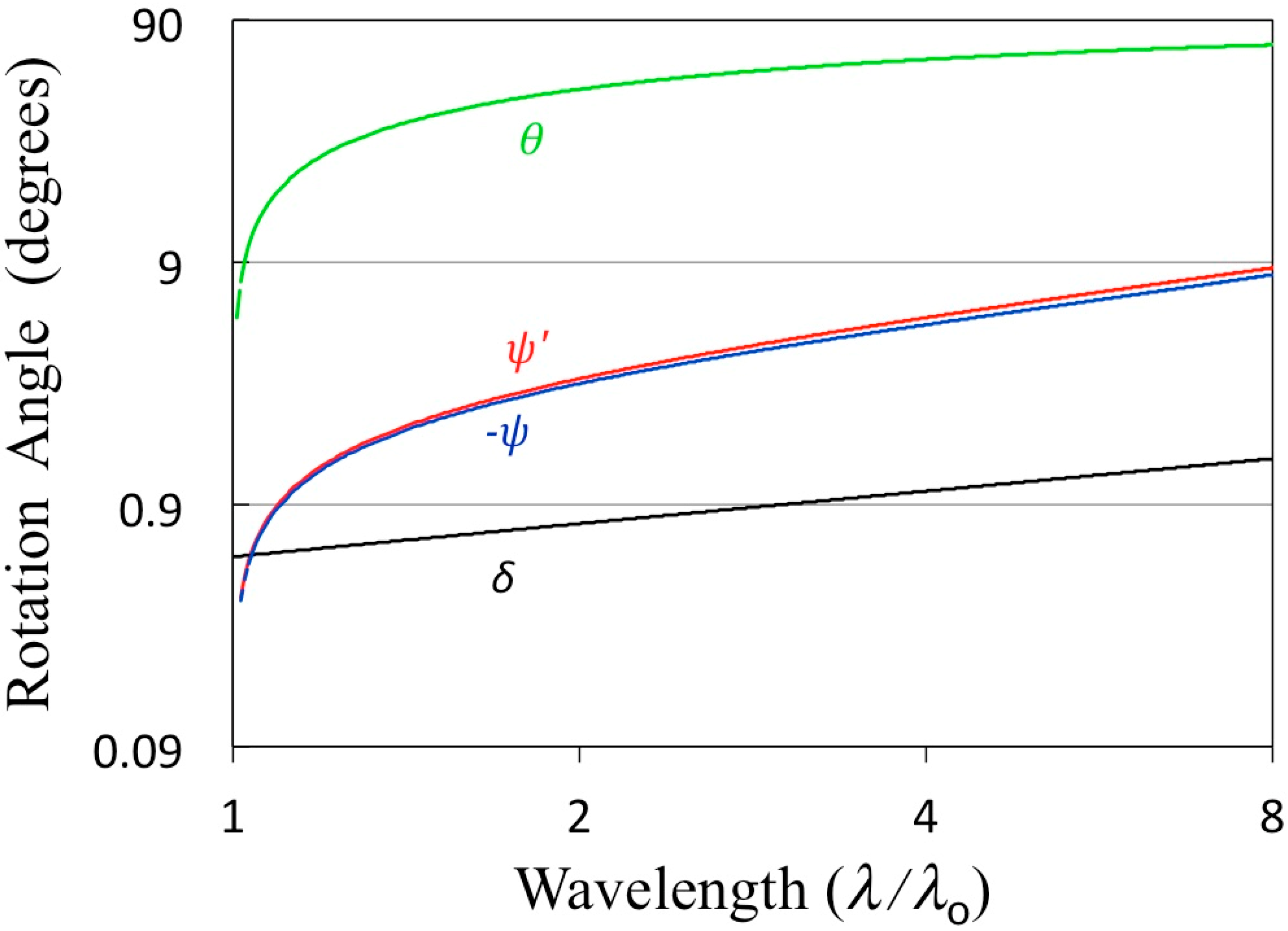
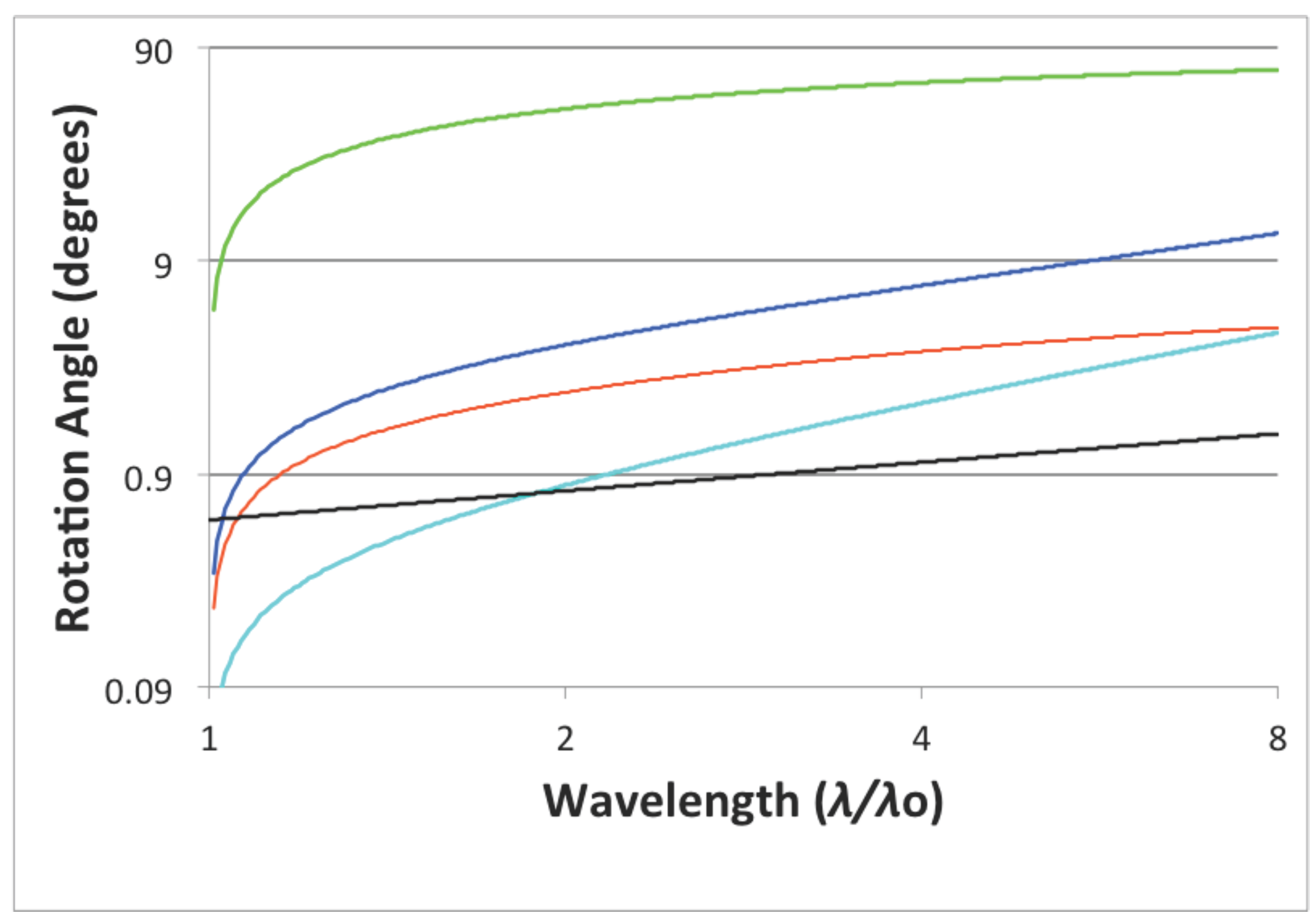
The required entrance and exit slit rotation angles,
and
, are plotted
vs. scan wavelength in
Figure 4. While these rotation values are comparable in magnitude, they are opposite in direction. This is due to the present treatment of the entrance slit as being an isotropic emitter (e.g., back-illuminated by a diffuse source), thus each point along the length of the slit has its own principal ray whose vertical coordinate reverses sign at the grating pole. However, if the entrance slit were illuminated by a distant horizontal (vertically-narrow) source, there would by a mapping between the z-values of points along the entrance slit and the sagittal pupil coordinate
. This may be treated by a nonzero value of
, as indicated in
Section 3.2 and provided by the general expansion equations. The result would be no sign reversal of the required entrance slit rotation angle, opening the possibility for the entrance and exit slit rotations to be replaced by a third rotation of the grating (about its
-axis), similar to the technique first employed in a SNR monochromator in 1993 as given in Section 4.2d of the cited thesis [
15].
Figure 4.
The grating scan angles are (about the groove axis) and (about the surface normal axis). The entrance slit tilt angle () is slightly smaller in magnitude and opposite in sign (negated here for plotting convenience) than the exit slit tilt angle ().
Figure 4.
The grating scan angles are (about the groove axis) and (about the surface normal axis). The entrance slit tilt angle () is slightly smaller in magnitude and opposite in sign (negated here for plotting convenience) than the exit slit tilt angle ().
The sequence of analytical calculations which determine the scan operating parameters are now specified:
(1) The grating first rotation angle , which sets and ;
(2) The grating second nominal rotation angle from Equation (58), using above ;
(3) Exact obtained numerically from Equation (57), with or without balance of spherical aberration (Equation (59));
(4) The dimensionless wavelength from Equation (10) or (12), using ;
(5) The exit slit tilt angle from Equation (56), using above ; and
(6) The entrance slit tilt angle from Equation (61), using above .
Using
as specified above (and an object position
), the principal ray terms and aberrations are then determined from Equations (9,11) and (41–54), respectively. Transformation of the horizontal (
) and vertical (
) lateral positions to spectral resolution
and exit slit height
requires a final rotational transformation at the image plane, as given in
Section 6.
5.5. Image Curvature
Spectral curvature along the image length is given by
which is the sum of three components (the paraxial position and two aberrations). The first term is the paraxial image curvature of a straight entrance slit, resulting in a deviation from a straight exit slit (albeit rotated in accordance with Equations (55), (56) or (60)) obtained by the rotational transformation of Equation (67) on the
terms of the horizontal (
) and vertical (
) positions (Equations (11) and (9), respectively):
This component of the image curvature may be eliminated only by curving the entrance (not exit) slit. However, such correction is both difficult (due to its dependence on
) and unnecessary; for the example monochromator parameters, the uncorrected curvature at the ends of the 74 mm long image of the entrance slit is only
microns at
and decreases to
microns at
. This is confirmed (within 0.1 microns) by the numerical raytracings (1D profile of
Figure 6i), revealing that the entrance slit length causes only a slight asymmetry and horizontal shift in the spectral line.
Horizontal curvature of the (vertical) astigmatism from a point source is given by
(Equation (52)), often referred to as “sagittal coma” or “astigmatic coma”. This term, together with
from Equation (45) determines the curvature in the spectral direction (
) using Equation (67):
In spatial units, this resolution corresponds to 0.36
m at the minimum scan wavelength, zero at the (passive) correction wavelength (
) and 1.16
m at the maximum wavelength, confirmed by the numerical raytracings within 0.07
m. As given in
Figure 5, these correspond to spectral resolutions (
) of 2 × 10
−6, zero and 3 × 10
−6, respectively.
It is noted that there are no (
i,1) aberrations when
0, where the straight grooves are perpendicular to the meridional plane. In this case, the dominant mixed aberration is astigmatic coma (
), for which the residual nonzero component of Equation (64) yields simply
, independent of
. This is the same result previously reported [
8,
15] for a plane grating in a converging (stigmatic) beam where
While of importance and of historical significance in that original VLS application to fast XUV telescope beams (
0.1), this aberration is negligible for most soft X-ray laboratory applications (e.g.,
2 × 10
−6 for
0.004). It is also noted that the passive correction point seen in
Figure 5 may be obtained by zeroing the coefficient of the
term in Equation (52), yielding
36°, though this aberration remains small across the scan range.
When expanded to include an off-plane (
) object point, the spectral aberration of sagittally-induced image tilt (
), otherwise zero by proper rotation of the exit slit (
Section 5.1), also has a small curvature component. However, because nonzero values of z are not included in the expansion of the aberration terms (
i + j ) at present, the required horizontal and vertical component terms are not given in Equations (42) and (41), respectively.
5.6. The Horizontal Mixed Aberrations (2,1) and (3,1)
As shown in
Figure 5, the dominant spectral aberration at long wavelengths is due to the (2,1) mixed term, which vanishes at one scan wavelength. A good approximation to this “passive correction” point may be obtained by zeroing the coefficient of the linear term in
from Equation (47):
Simplifying this expression by treating
and
as small angles yields:
which occurs at
47.8° (
) for the example monochromator. However, this aberration is dominant at larger rotation angles, reaching a full-width comparable to that of the pure meridional (3,0) aberration at the long-wavelength end of the scan range (
71.25°). As the magnitude of this mixed aberration scales with
ωσ, it is highest at the corners of the solid aperture. An elliptically-shaped illumination would thereby halve the aberration with only a 22% intensity loss. However, for clarity the present analysis employs a simple rectangular aperture. The horizontal (2,1) ray aberration was also required to obtain the non-paraxial reference image position in the expansions of the (4,0) and (3,1) horizontal aberrations. As this is the dominant mixed aberration in the horizontal direction, the coefficients to degree
were expanded so as to maintain accurate results even if
increases (e.g., due to use of a higher graze angle).
As will be clear from the spectral resolution plot (
Figure 5) and the raytrace diagram (
Figure 6), the higher-degree (3,1) aberration causes only a small distortion to the above (2,1) aberration. Therefore, its laborious Fermat expansion (requiring nine lateral aberrations to compose the proper reference image, as listed in
Table 2) was performed only for the linear component in
and is given by Equation (54).
5.7. Minor Vertical Aberrations (1,2), (2,1), (3,1) and (2,2)
Given that the horizontal (1,2) aberration is very small, the vertical (1,2) aberration is surprisingly large (11 microns for the example design). This result would not be obtained from the standard light-path formulation, even given the aforementioned “astigmatism exception”. The aberration is correctly determined here by the inclusion of two additional non-paraxial reference points, namely
, as listed in
Table 2. Though not being of practical significance in itself for a (highly) astigmatic monochromator, the image plane rotation of Equation (67) transforms this vertical aberration into a non-negligible (
1 micron) component of the (2,1) image width in the spectral direction. The vertical (1,2) aberration is also required as a non-paraxial reference for the correct expansion of the (dominant) horizontal (2,1) aberration.
Similarly, the vertical (2,1), (3,1) and (2,2) aberrations are of no importance in themselves, as they are comparatively negligible additions to the astigmatism term. However, their explicit expansions have been given in
Section 4 to provide the comprehensive set of vertical reference image coordinates required for the expansion of the horizontal (3,0), (4,0) and (3,1) aberrations, respectively. The image plane rotation of Equations (67) and (68) also transforms the (2,1), (3,1) and (2,2) vertical aberrations into non-negligible components of the (3,0), (4,0) and (3,1) spectral aberrations.
6. Spectral Resolution
The spectral resolution equals the grating dispersion times the ray aberration normal to the slit length. The latter is determined by a rotational transformation of the image plane coordinates (
) to those of the
-tilted image plane (
). The power series is carried over to the
coordinate by linearly combining the vertical and horizontal coefficients in accordance with:
Division by the linear dispersion per fractional wavelength yields the corresponding wavelength shift coefficients
where tan
is given by Equation (56). The wavelength variation modulus (
) of each term over the full rectangular grating aperture (
) is its “extremum” (full width) aberration:
where
if
i is odd and
j is even; otherwise
; and in which the full angular frontal apertures are
sin
α (meridionally) and
(sagittally). Using Equations (67)–(69) with the constituent horizontal (
) and vertical (
) ray aberrations given by the light-path Equations (41)–(54),
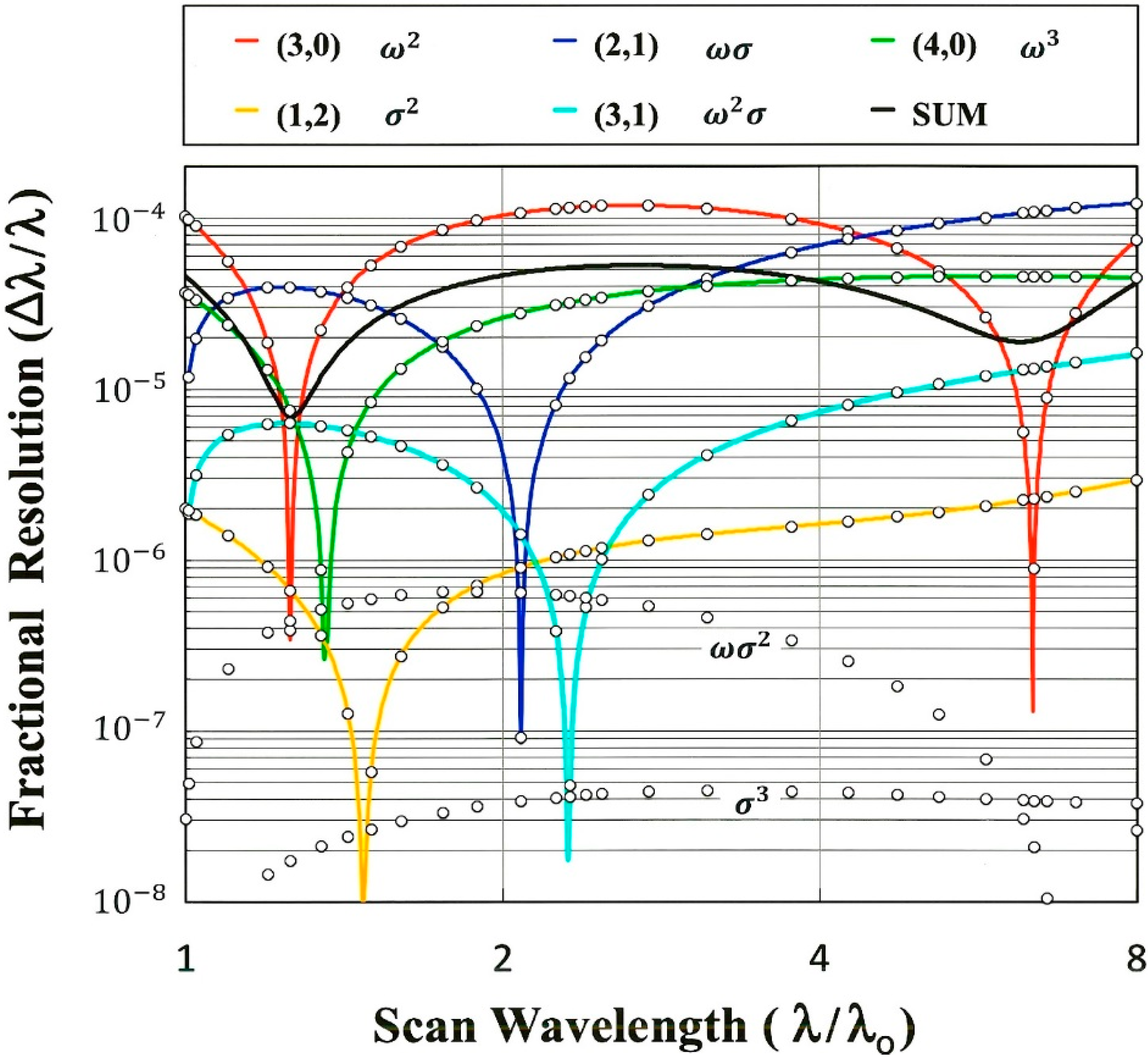
Figure 5 plots each of the nonzero spectral aberration terms
. In the absence of spherical aberration balancing (
Section 5.3),
and
are each zero relative to the rotated exit slit normal, as devised in
Section 5.4 and
Section 5.5. The
and
corrections for (3,0) and (4,0) specified in
Section 2 are verified by
Figure 5 to indeed minimize their peak magnitudes over the intended scan range of three octaves.
Figure 5.
Geometrical spectral aberrations of a soft X-ray single-element plane grating monochromator (SEPGM) at the Gaussian image plane. The grazing angular deviation is 6° and the incident aperture is 2 mrad horizontally × 4 mrad vertically. The meridional and sagittal aperture dependences of the individual terms are given in the legend, and plotted as extrema (peak-to-valley) over the full grating aperture. The colored curves result from rigorous expansion and Fermat differentiation of light-path functions, while the open circles are algebraic extractions from numerical raytracings at 29 wavelengths. Discrepancies between these two independent methods of analysis are negligible (~ 10−10 in ), being four orders of magnitude smaller than the physical diffraction width at a wavelength of 1 nm. The black curve is a conservative index of the net RMS geometrical resolution, summed from the individual terms (see the text).
Figure 5.
Geometrical spectral aberrations of a soft X-ray single-element plane grating monochromator (SEPGM) at the Gaussian image plane. The grazing angular deviation is 6° and the incident aperture is 2 mrad horizontally × 4 mrad vertically. The meridional and sagittal aperture dependences of the individual terms are given in the legend, and plotted as extrema (peak-to-valley) over the full grating aperture. The colored curves result from rigorous expansion and Fermat differentiation of light-path functions, while the open circles are algebraic extractions from numerical raytracings at 29 wavelengths. Discrepancies between these two independent methods of analysis are negligible (~ 10−10 in ), being four orders of magnitude smaller than the physical diffraction width at a wavelength of 1 nm. The black curve is a conservative index of the net RMS geometrical resolution, summed from the individual terms (see the text).
An easily-calculable index of the net (measureable) spectral resolution is the root-mean-square (RMS) of the wavelength deviations (relative to that diffracted from the grating pole):
where
,
,
and where Equation (71) includes all terms up to a power-sum of 3, except for the insignificant terms of
and
. This RMS value is also plotted in
Figure 5. The surface integral in Equation (70) corresponds to rays distributed uniformly on the grating surface, which differs somewhat from a uniform angular distribution originating at the object (source) point. It is also noted that the presence of asymmetrical aberrations, particularly the dominant (3,0) term, results in a nonzero mean value for the deviation. This offset causes Equation (71) to calculate somewhat larger values than a true “RMS width”, where the deviations would be calculated relative to the mean.
The first [bracketed sum] in Equation (71) contains a cross-product of the
20 (defocus) and
40 (spherical aberration) coefficients; by departing from the (abstract) condition of being “in-focus” (
200), this product can be made negative and thus partially balance the positive
and
terms (as accomplished by the focus adjustment derived in
Section 5.3). However, such (partial) balancing of these two different terms is aperture-dependent. Similarly, the second [bracketed sum] shows that combined coma may be made smaller than the sum of the positive meridionally-induced and positive sagittally-induced components. While exploited in normal-incidence optics (having
a 3:1 ratio between these components), grazing angles result in the much larger (
10:1) ratios evident in
Figure 5, enabling little such coma balancing. The maximum value of sagittally-induced coma (1,2) is 2.9 × 10
−6 at
max71.25° (being only 1.5 times its in-plane value at
0) and is small compared to either the (25 times larger) meridionally-induced coma (3,0) or the (50 times larger) dominant aberration (2,1).
More generally, given a design optimized in resolution over a scan range of
octaves, and given a ratio of
between
10 and 100, meridional coma dominates the spectral aberration (provided the aperture aspect ratio
); fitting to several such sets of parameters yields the following approximate relation for the nominal resolving power (
) over the designed scan range:
This simple result shows a resolving power which scales quadratically with the graze angle and inversely with both the solid angle of acceptance and the spectral range. For the ultra-high resolution design plotted in
Figure 5,
25 and
3, for which Equation (72) estimates
(in agreement with the value of 29,000 obtained by averaging Equation (71) over the scan range). As specified in
Section 5.3, optimization of the resolution for higher apertures (𝑒e.g.,
γ/
ϕ ~ 8) requires some “least-confusion” defocusing to balance the dominant spherical aberration term. At yet higher apertures, several limitations would emerge: (1) spherical aberration would finally dominate and thus invalidate Equation (72); (2) more than a 50% line-space variation (
Section 8.4) would be required; and (3) the large (
12%) variation in graze angle in the meridional direction would compromise the average reflectivity.
In the direction along the slit length, the rotational transformation of the image plane yields
resulting in the following full-width aberrations in the direction parallel to the slit and relative to its center (
):
7. Numerical Raytrace Simulations
Independent confirmation of the light-path equations derived in
Section 2,
Section 3,
Section 4,
Section 5 and
Section 6 is obtained here by three-dimensional numerical raytraces, using the commercial code “BEAM4” developed by M. Lampton [
16]. An angular deviation of
6° is chosen, as it provides a single-bounce gold reflectance of
50% at
1 nm in the soft X-ray. To display the optical aberrations, the raytraced source is a point at the entrance slit. However, if 5 micron wide slits are to contribute a dispersive component (
Section 8.5) equal to the nominal optical resolving power of
25,000, the object distance must be r
3000 mm. This scale converts the design parameters (listed in
Section 2.6) to the following dimensional values:
| (Image distance) | 11,100 mm |
| (Line density at the pole) | 1000 mm−1 |
| (VLS ruling coefficients) | 20.955315252 mm−2 |
| | 3−2.792863 × 10−4 mm−3 |
| 41.906 × 10-7 mm-4 |
From Equation (4), one may easily determine the required accuracy for
is
thus (1000/25000)/(214 mm)
0.0002 mm
−2 for 2
. This translates to a groove positioning error of
0.0005 mm (1/2 groove width). This tolerance is 3 orders of magnitude less stringent than demonstrated (0.1
1 nm) by existing technologies in the fabrication of low scatter gratings [
4,
17]. To accept the 2 mrad (
) × 4 mrad (
) frontal aperture at every angular orientation (
) across the wavelength scan, the grating must have a physical aperture of 214 mm in diameter. At each value of
, only the light-path equations given in
Section 2,
Section 3,
Section 4 and
Section 5 were used to determine the fixed (“cold”) inputs (
) for raytrace simulations run at 29 sample wavelengths across the three-octave scan range. No numerical optimization was performed by the raytrace routine (e.g., no “auto-focus” used).
7.1. Spot Diagrams
The right-hand panels of
Figure 6 are the result of uniformly illuminating the grating rectangular pupil aperture with 10,000 randomly placed rays from the on-axis object point. Eight scan wavelengths were selected to highlight the different characteristic aberrations, and their convolutions, as listed in the caption. In these phase-space plots, horizontal sagittal coma (1,2) appears as a finite width at
(visible only in
Figure 6a), meridional coma (3,0) appears as a parabola (e.g.,
Figure 6a,d, with this also being a component aberration in
Figure 6c,e,f,i), spherical aberration (4,0) causes a cubic (
S-shaped) asymmetry between the –
and
regions (most evident in
Figure 6a,f,g and i), the dominant mixed-term aberration of horizontal (2,1) appears as a “bow-tie” shape (in
Figure 6b,c,e,f,g,h,i) and the minor mixed-term aberration of horizontal (3,1) causes the widths of the bow-tie to be different at the 2 ends (lopsided), as visible only in
Figure 6g,h and i.
The bow-tie shaped aberration (2,1) is absent only for the in-plane orientation (
at which
and at the passive correction point given by
using Equation (66) for which
. At those two wavelengths, the phase-space spot diagrams of
Figure 6a,d show the classical curves resulting from the addition of the quadratic (coma) and cubic (spherical aberration) terms. Conversely, in
Figure 6b these pure meridional aberrations are absent or small, resulting in the near-exclusive presence of the mixed aberration (2,1). It is also noted that
Figure 6h confirms the least-confusion balancing (
Section 5.3) of the defocus and spherical aberration terms given by Equation (59).
7.2. Line Profiles
The left-most panels in
Figure 6 display the simulated (raytraced) spectra of the line doublet near three representative wavelengths within the scan range. The thick line segment shows the “RMS” value calculated by Equation (71). Due to the dominant aberration of coma (3,0) being more highly peaked than a normal distribution, the actual marginal optical resolution is much finer than the usual measure of a full-width-at-half-maximum
2.355 RMS, except at the 2 coma-corrected wavelengths (
and 6.58) where the marginal resolution is
1 RMS. Though
Section 7.3 will reveal more quantitative detail for each aberration, it is evident in
Figure 6 that the spectral resolution is comparable to or better than the 1/20,000 separating the two raytraced lines, thus confirming the net convolution of the light-path terms as plotted (black curve) in
Figure 5.
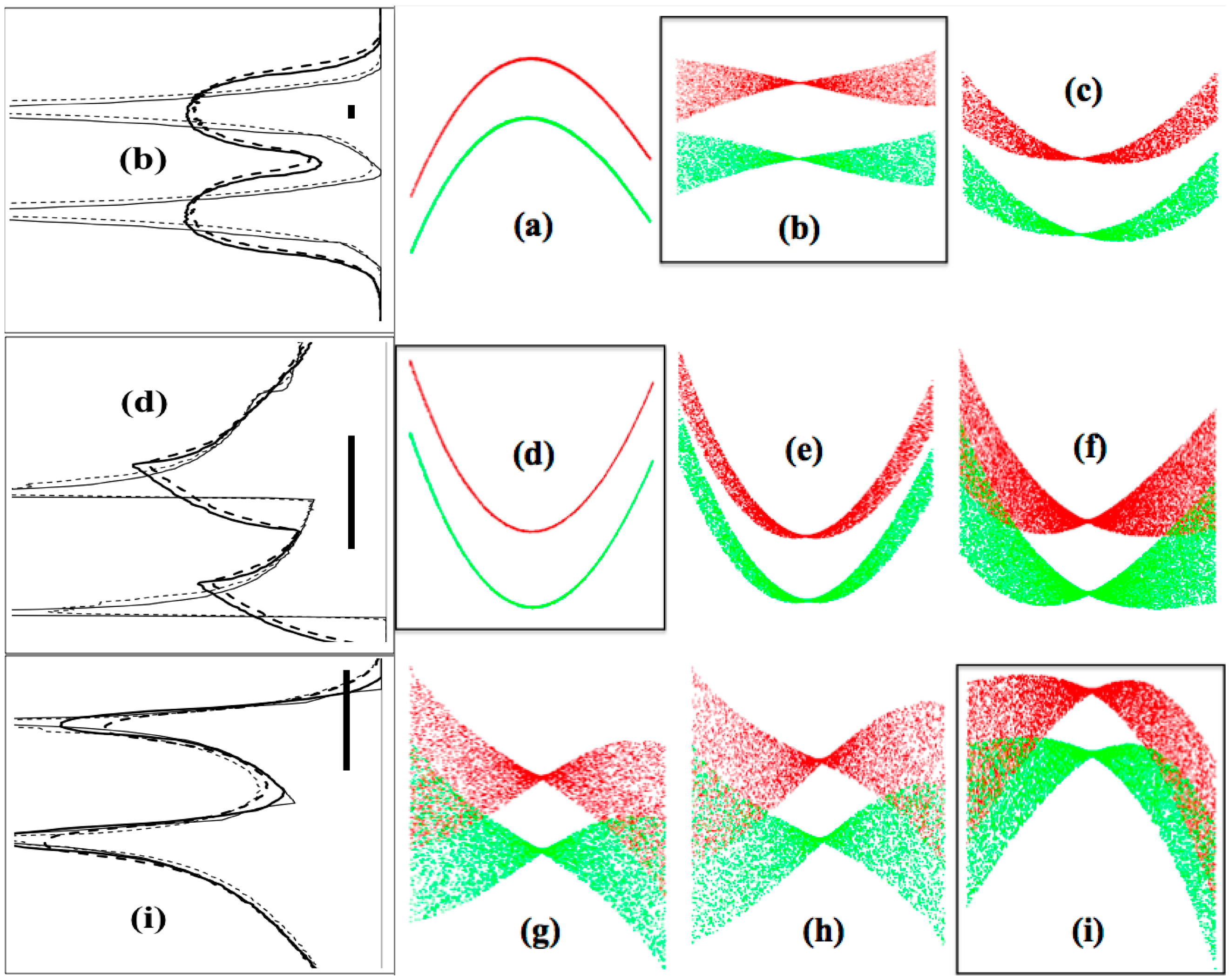
Figure 6.
Numerical raytracings of an ultra-high resolution SEPGM, displayed in phase-space 2D spot diagrams ( vs. ) and 1D spectral profiles (intensity vs. ). The meridional pupil coordinate spans 140 mm at to 214 mm at 8, corresponding to 2 mrad in angular aperture. Wavelength increases to the top of each panel, in which the two wavelengths (shown here in green and red) are separated by 1 part in 20,000; their dispersed separation (9 microns at to 18 microns at 8) provides the dimensional scale for the image plane coordinate . (a) (0°): dominant coma (3,0), some spherical aberration (4,0) and slight sagittal coma (1,2); (b) 1.26: (3,0) canceled, dominant (2,1) and slight (4,0); (c) 1.43: (4,0) canceled, (1,2) nearly canceled, (2,1)–(3,0); (d) 2.08: (2,1) canceled, dominant (3,0); (e) 2.5: (3,1) canceled, dominant (3,0) near maximum, (2,1)–(4,0); (f) 5.2: dominant bow-tie (2,1), (3,0)–(4,0); (g) 6.58: (3,0) canceled, dominant (2,1), some (4,0), slight (3,1); (h) per 6(g), but with (2,0) adjusted to balance (4,0) for least-confusion; and (i) 7.99: (71.25°), (3,0)–(2,1)–(4,0), slight (3,1).
Figure 6.
Numerical raytracings of an ultra-high resolution SEPGM, displayed in phase-space 2D spot diagrams ( vs. ) and 1D spectral profiles (intensity vs. ). The meridional pupil coordinate spans 140 mm at to 214 mm at 8, corresponding to 2 mrad in angular aperture. Wavelength increases to the top of each panel, in which the two wavelengths (shown here in green and red) are separated by 1 part in 20,000; their dispersed separation (9 microns at to 18 microns at 8) provides the dimensional scale for the image plane coordinate . (a) (0°): dominant coma (3,0), some spherical aberration (4,0) and slight sagittal coma (1,2); (b) 1.26: (3,0) canceled, dominant (2,1) and slight (4,0); (c) 1.43: (4,0) canceled, (1,2) nearly canceled, (2,1)–(3,0); (d) 2.08: (2,1) canceled, dominant (3,0); (e) 2.5: (3,1) canceled, dominant (3,0) near maximum, (2,1)–(4,0); (f) 5.2: dominant bow-tie (2,1), (3,0)–(4,0); (g) 6.58: (3,0) canceled, dominant (2,1), some (4,0), slight (3,1); (h) per 6(g), but with (2,0) adjusted to balance (4,0) for least-confusion; and (i) 7.99: (71.25°), (3,0)–(2,1)–(4,0), slight (3,1).
![]()
Four objects were used in the 1D simulations: a point (
_____), as used for the 2D diagrams; a 3
horizontal width (
____), a 20 mm long slit (------) and a 3
wide × 20 mm long slit (
- - - -). The entrance slit was an isotropic source (equivalent to a passive slit backlit by a diffuse source) and tilted in accordance with Equation (61) for its image to coincide with the exit slit. The absence of any significant broadening in the line profiles obviates the need at present to include off-plane object (
) terms in the aberration expansions Equations (41)–(54) which were derived in
Section 4 for a point source (
). The 1D spectral profiles exhibit the following aberration ratios:
(b) ;
(d) ;
(i) .
The small longward shifts of the peak positions (compare the solid and dashed curves) for the 2 shorter wavelengths ((b) and (d)) is due to
1 micron image curvature of the straight entrance slit, as given by Equation (11). For the longest wavelength trace (i), the shift is seen to be in the opposite (shortward) direction and very small (
0.2 microns), as predicted by Equation (63). “Pre-emptively” curving the entrance slit by a corresponding amount in the opposite sense (see
Section 5.5) is found to eliminate such curvature and shift at the image plane (verified by a raytracing at
).
7.3. Power Series Extraction
Precise raytracings provide an alternate (and independent) method of determining the numerical value of the power series aberration terms derived from first principles in
Section 3 and
Section 4. Image positions (a “spot diagram”) from 21 pupil points are sufficient to extract all 20 component terms of power-sum (
i + j − 1)
3, each free of contamination by any (other) term of power-sum
6. A numbered set of convenient grating pupil coordinate pairs used is:
where
and
denote the meridional and sagittal pupil half-widths, respectively. The difference (or sum) of two image plane positions, each relative to the principal ray, is written succinctly as (for example)
, or (as another example)
. It is also found that 13 pupil points (nos. 0 through 12) are sufficient to extract the same 20 terms, however with a small amount of contamination from (other) terms of power-sum
3.
The first two terms are simply the principal ray positions:
;
. The remaining 18 are the extrema aberrations (
being the P-V variation in the lateral ray image positions over the rectangular grating aperture of
and
). Each of these “extraction” Equations (75)–(92) are given in both 21-ray form and (after the “
” sign) 13-ray form, followed by an identification of the lowest power contaminant term(s) for the latter. The indicated percentage level of contamination was determined, at the highest scanned wavelength (
8) of the example monochromator, by comparing the results at two different values of the aperture in each direction, thus exposing its (distinct) power dependence, namely
for
and
for
.
The largest absolute contamination in the 13-ray extractions is
% times the magnitude of the
geometric aberration. As shown in
Figure 5, the latter results in a maximum spectral aberration (at the longest wavelength) of
10
−4, thus the 13-ray extraction is in error by only the negligible magnitude of
3 × 10
−8. However, this contamination error was eliminated by use of the 21-ray extraction when calculating the deviations (given in
Table 2) between the numerical (raytrace) extractions of Equations (75)–(88) and those calculated from first principles by the new (rigorous) light-path expansions of Equations (41)–(54). There are no adjustable parameters in either method, and thus no “fitting” of one to the other. The extremely small deviations shown in this table can therefore only be the result of both accurate light-path equations and accurate raytracings. For example, the raytracings illuminate the grating
surface by the
exact and centered rectangular aperture used in the analytical equations (
), whereby
(though the exact non-linear equation is used) is a strong function of
as the grating is rotated. In addition, the formulations take equal care in the horizontal and vertical directions, as both spatial aberrations contribute to the spectral aberration. This is due both (directly) to the image tilt which includes the vertical aberration term
in the rotational transformation of Equation (68), and (indirectly) to the need for inclusion of the vertical reference image position
in Equation (37).
Equations (75)–(92) may be converted from extrema widths to power series coefficients by use of the transformations:
. Using Equations (68)–(70), these terms were then converted to spectral aberrations
and plotted in
Figure 5 as the open circles at 29 raytraced wavelengths. Note that, as formulated in
Section 5, the (tilted) spectral direction and the corresponding adjustment to the focusing condition cancels the effect of the first four aberrations (Equations (41)–(44) or Equations (75)–(78)), therefore
Figure 5 shows no power terms of
or
, as they vanish to within the accuracy of the calculations. The last four extraction Equations (89)–(92) result in the 58 raytraced points for
and
each contributing less than 10
−6. Due to these exceedingly small magnitudes (below the physical diffraction limit) and the large number of non-paraxial reference image coordinates required for their proper analytical expansion, the explicit equations for these have not been derived.
9. Conclusions
At fixed conjugate distances and horizontal deviation angle (2), self-focused grazing-incidence gratings defocus rapidly upon (groove-axis) in-plane rotation. This is due either to the use of a curved (concave) surface or to the change in (ratio of diffracted graze angle to incident graze angle) which determines the focusing condition of plane gratings. However, if varied line-spacing (VLS) provides the focusing power rather than surface curvature, strong defocusing also results from a surface-normal (off-plane) rotation, which can therefore be used to cancel that from the in-plane rotation. These concerted rotations also reinforce the change in wavelength, extending the scan range beyond that available from a single rotation. A new scanning geometry and class of monochromator has thereby been invented which requires only one plane surface, representing a terminal point in the progression of grazing incidence monochromator designs towards fewer and simpler surfaces.
Small-angle approximations to the light-path equations for a plane grating provide a clear understanding and classification of the essential spectral aberration characteristics for different optical geometries. This simplifies the equations, clearly revealing the imaging properties which are (nearly) independent of the graze angle. A more rigorous analysis of the imaging properties exhibited by the new monochromator geometry has precipitated the (incidental) introduction of two mathematical tools of more general applicability in aberration analysis; being an expansion formulation based on non-paraxial reference points and an extraction of aberration series coefficients from raytrace simulations:
(1) The small spectral aberrations and dominance of off-plane terms in the present monochromator geometry has unveiled a flaw in standard light-path formulations. A mathematically rigorous general light-path expansion theory has been introduced, which systematically employs reference wavefronts centered on non-paraxial image points. This procedure, while more complex than the standard approach, correctly isolates each power-term of the path-length series. Interestingly, comparison of the two formulations reveals that the standard approach does not in general provide the correct expansion (or consequently the total aberration), being inexact even in the simple case of a spherical mirror.
(2) An accurate method has been introduced for extracting the individual geometrical terms from the image positions of a small number (13–21) of numerically traced rays. For 14 of the 18 lateral aberrations of power-sum , a detailed comparison between these extractions and the analytical equations (derived from the new light-path formulation) shows essentially exact (10−11 radians) agreement, being several orders of magnitude finer than the physical diffraction width. This precision suggests that such extractions may be used in the future to infer (rather than derive) the Fermat equations, by composing them from an algebraic template of geometric parameters fit to the raytrace extractions. However, such numerical fitting has not been used in the present work, rather all equations have been derived from first principles.
Initial use of a meridional-only approach (based on the standard theory and the graze-angle-invariant approximation) and final use of the rigorously-developed (non-paraxial image reference) light-path formulation, have provided equations for various focusing conditions (horizontal, spectral and least-confusion spectral) by correlation of the two grating rotations. The theoretical analysis has also derived the required exit slit tilt () and entrance slit tilt () as functions of the scan parameters, the VLS ruling coefficients () for self-focusing and correction of the higher-degree meridional aberrations, an optimized value for the mount parameter () which provides cancelation of the higher-order (3,0) meridional aberration at two chosen wavelengths and explicit expansion equations of ultra-high accuracy for the 14 leading lateral aberration terms.
The spectral resolving power may be approximated by over a scan range of octaves for a collection aperture of (meridional) × (sagittal) radians. This large product of spectral resolution, solid aperture and scan range is due to the high level of aberration-correction provided by this geometry (particularly the cancelation of coma at 2 wavelengths) combined with the multiplicative change in wavelength provided by the two rotation motions. Such a high figure of merit may be parameterized between these 3 components (resolution, aperture and scan range) as desired, with examples given for an ultra-high resolution (25,000) soft X-ray “beamline” version (14 m length), a high collection aperture “table-top” version (2 m length) and an X-ray version (½°).

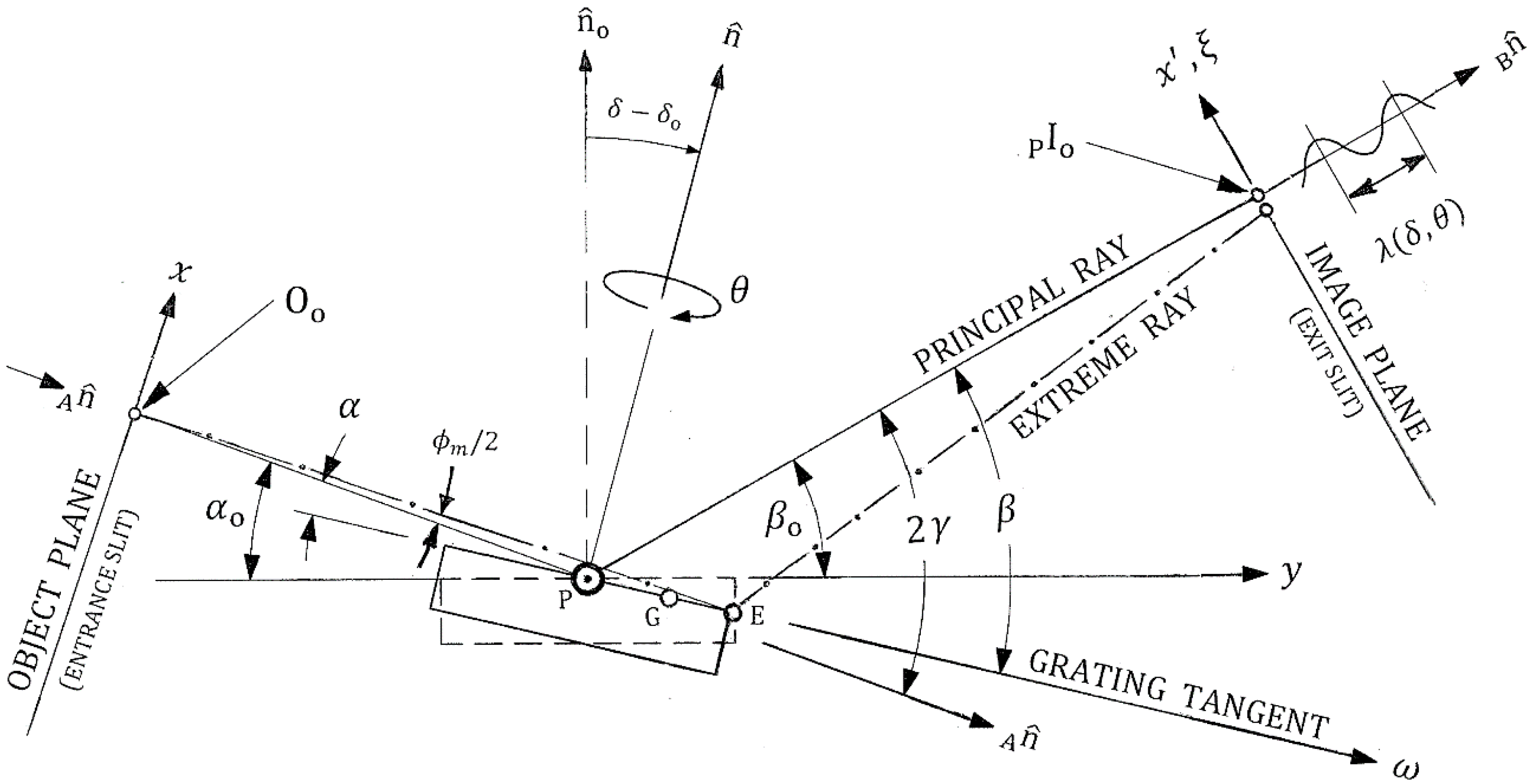
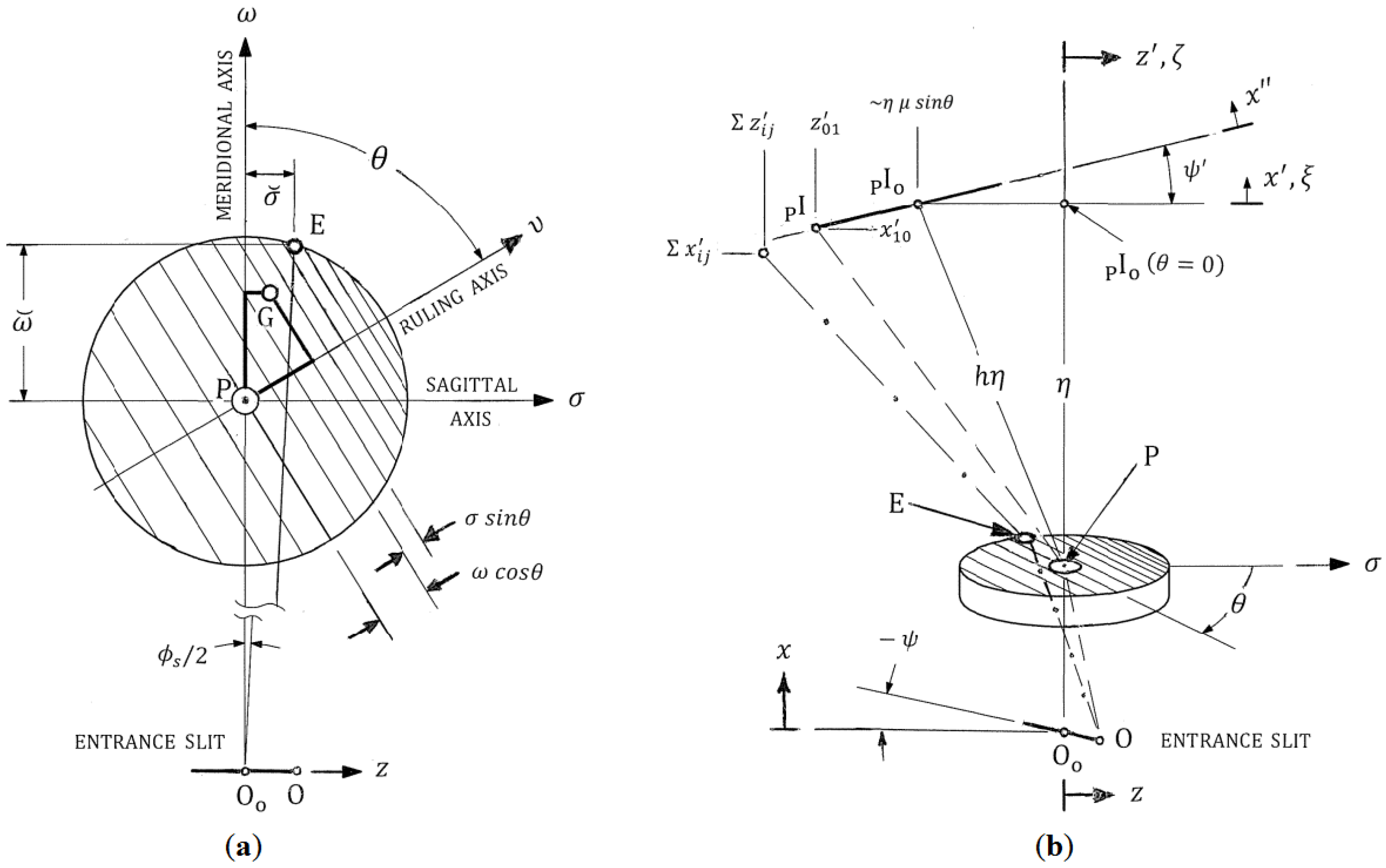
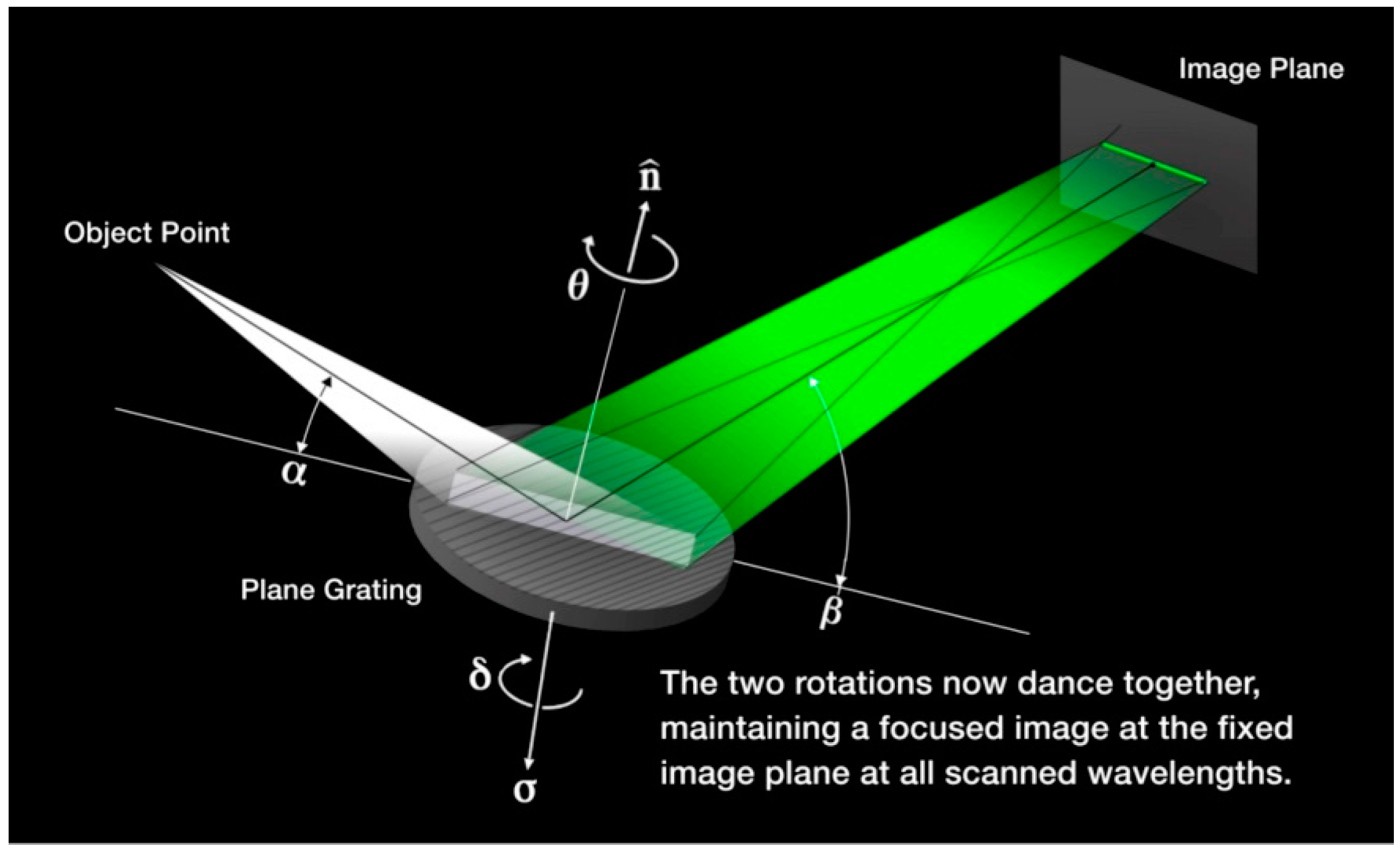

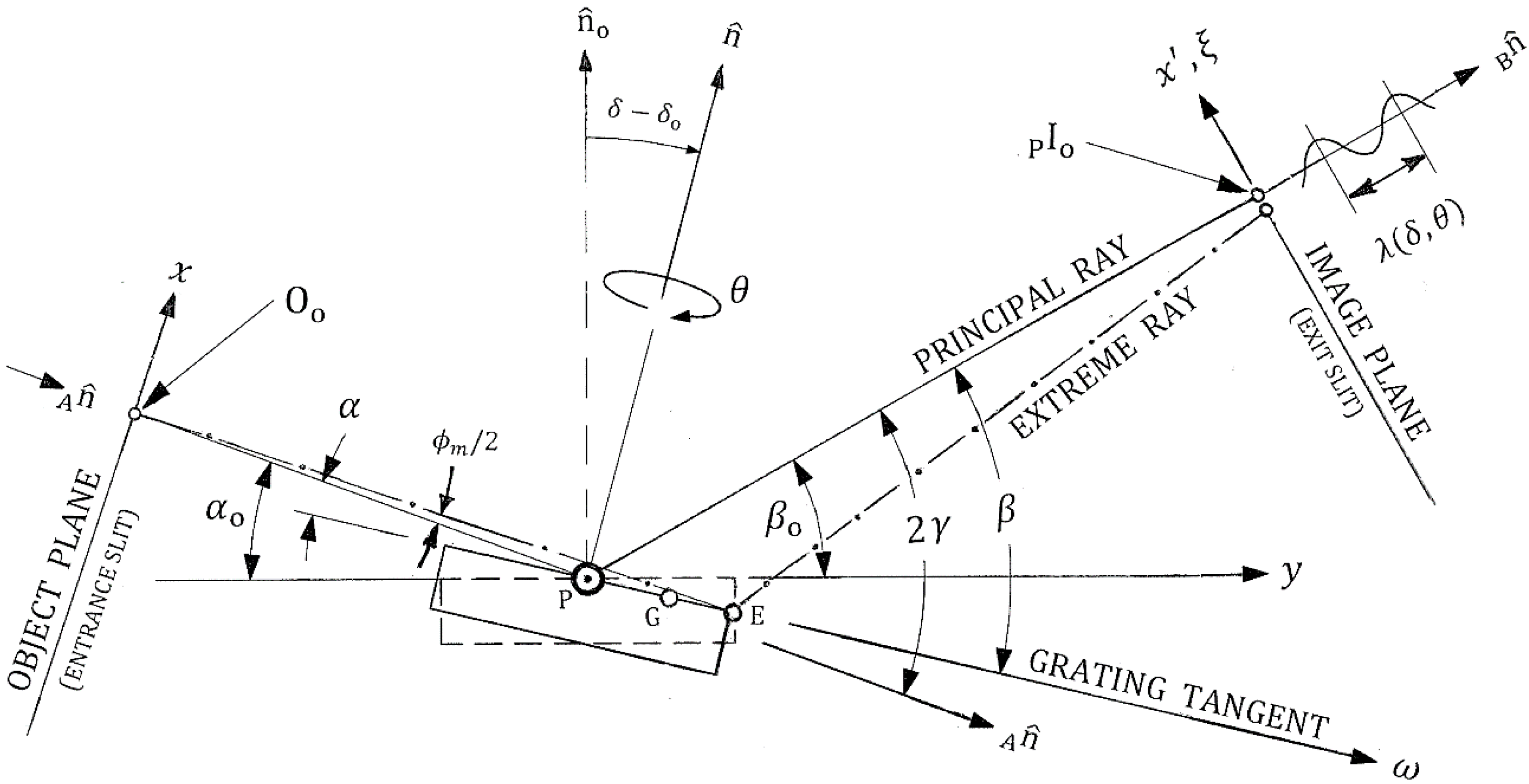{kind=link}
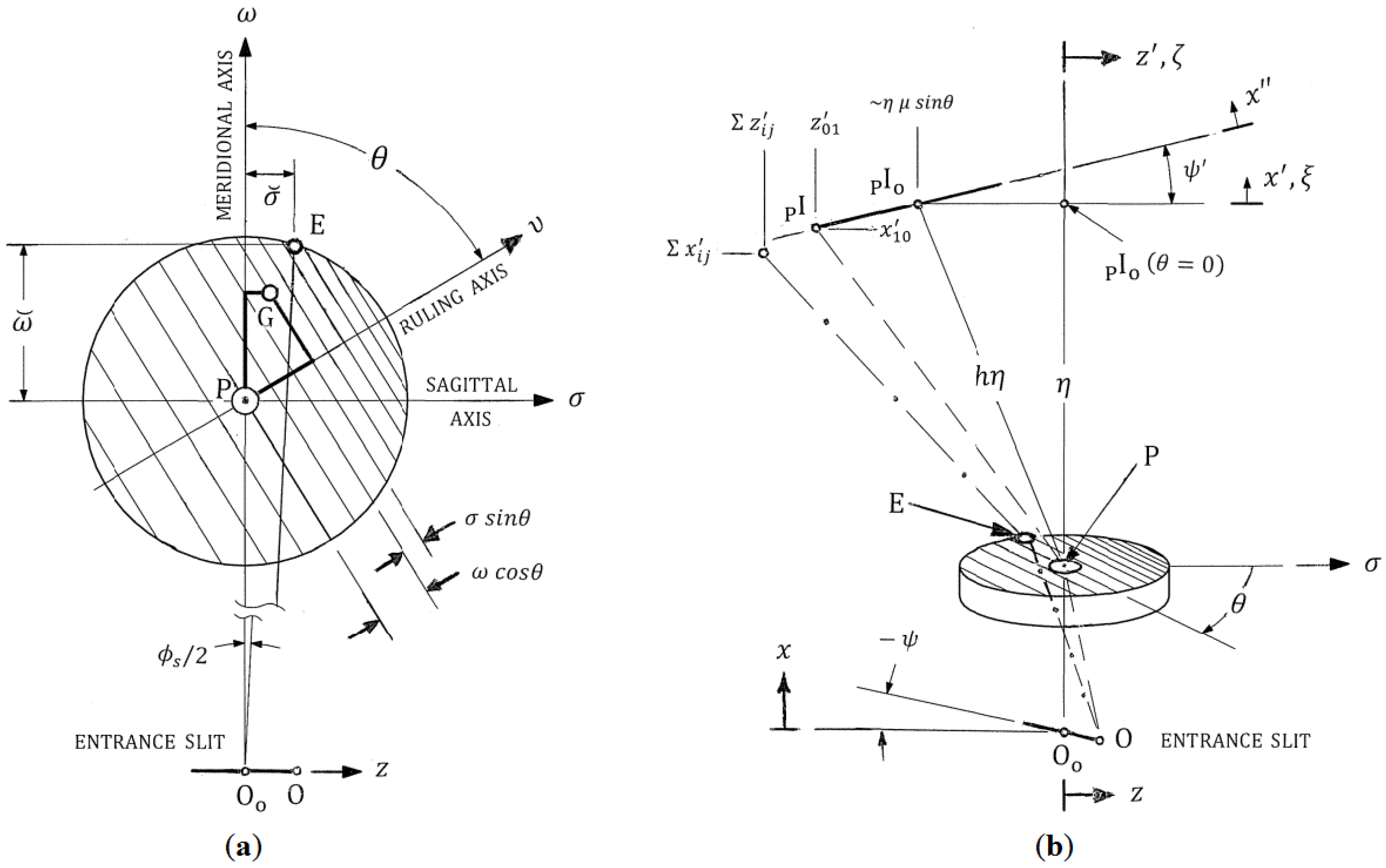{kind=link}
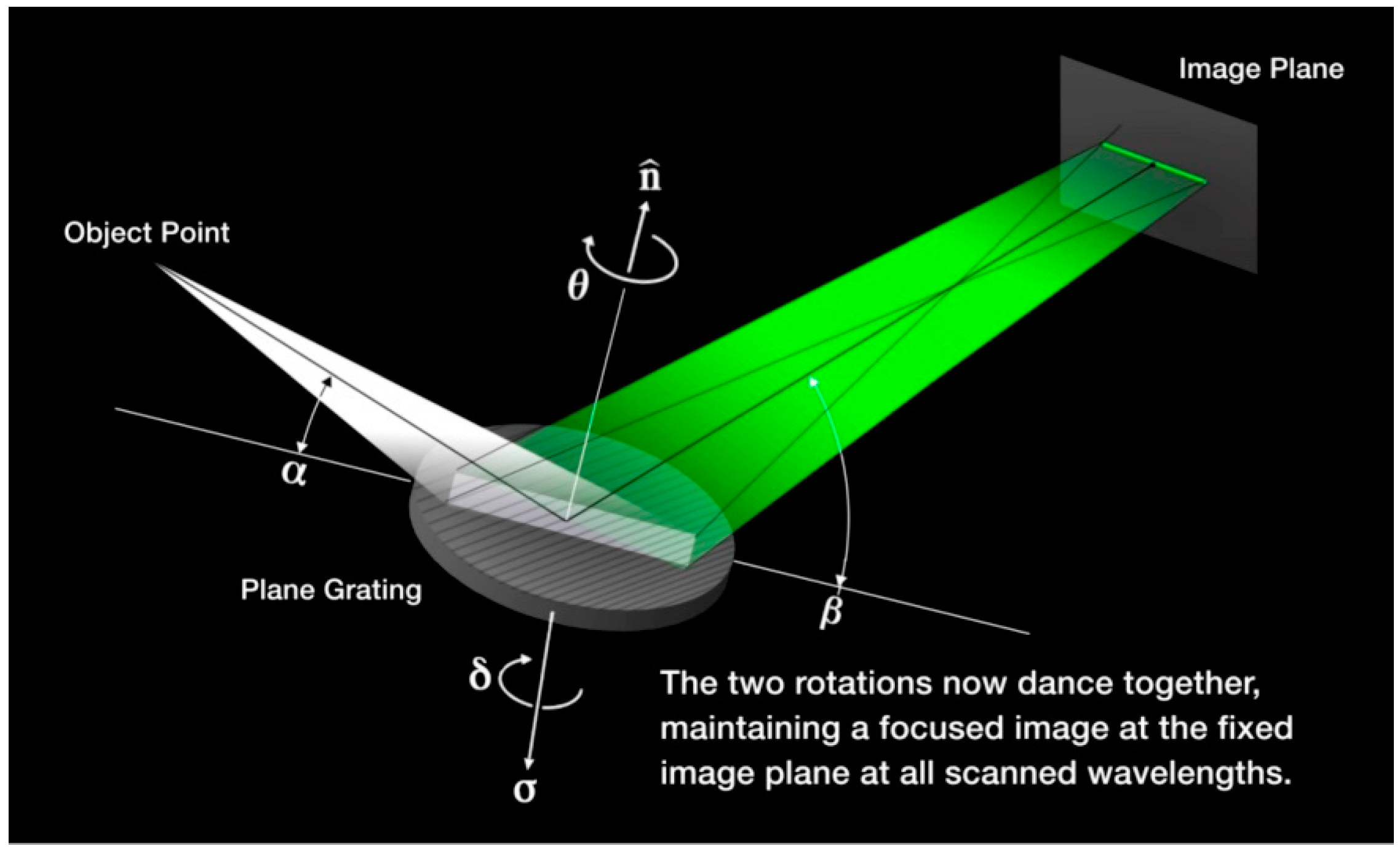{kind=link}
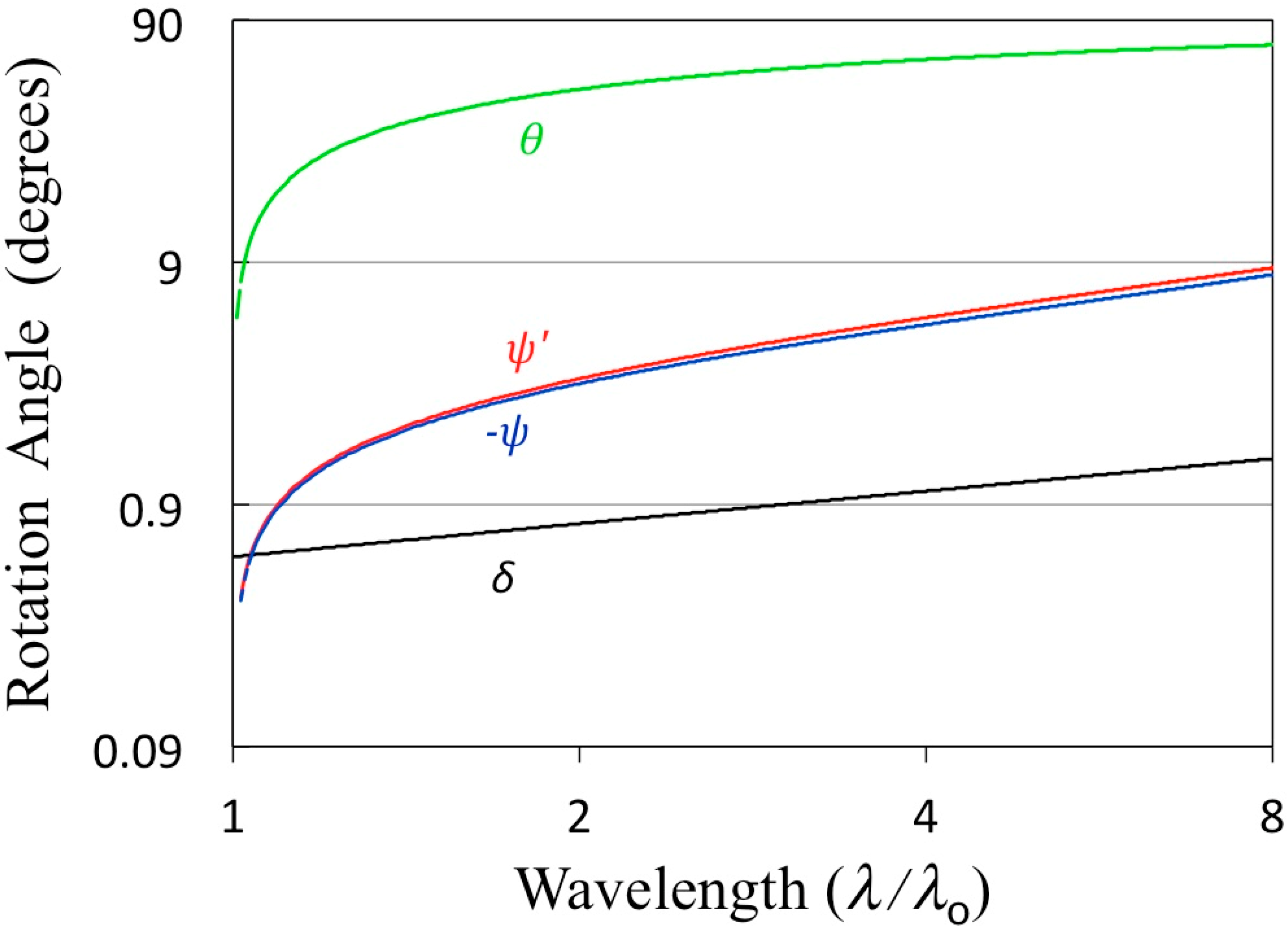{kind=link}
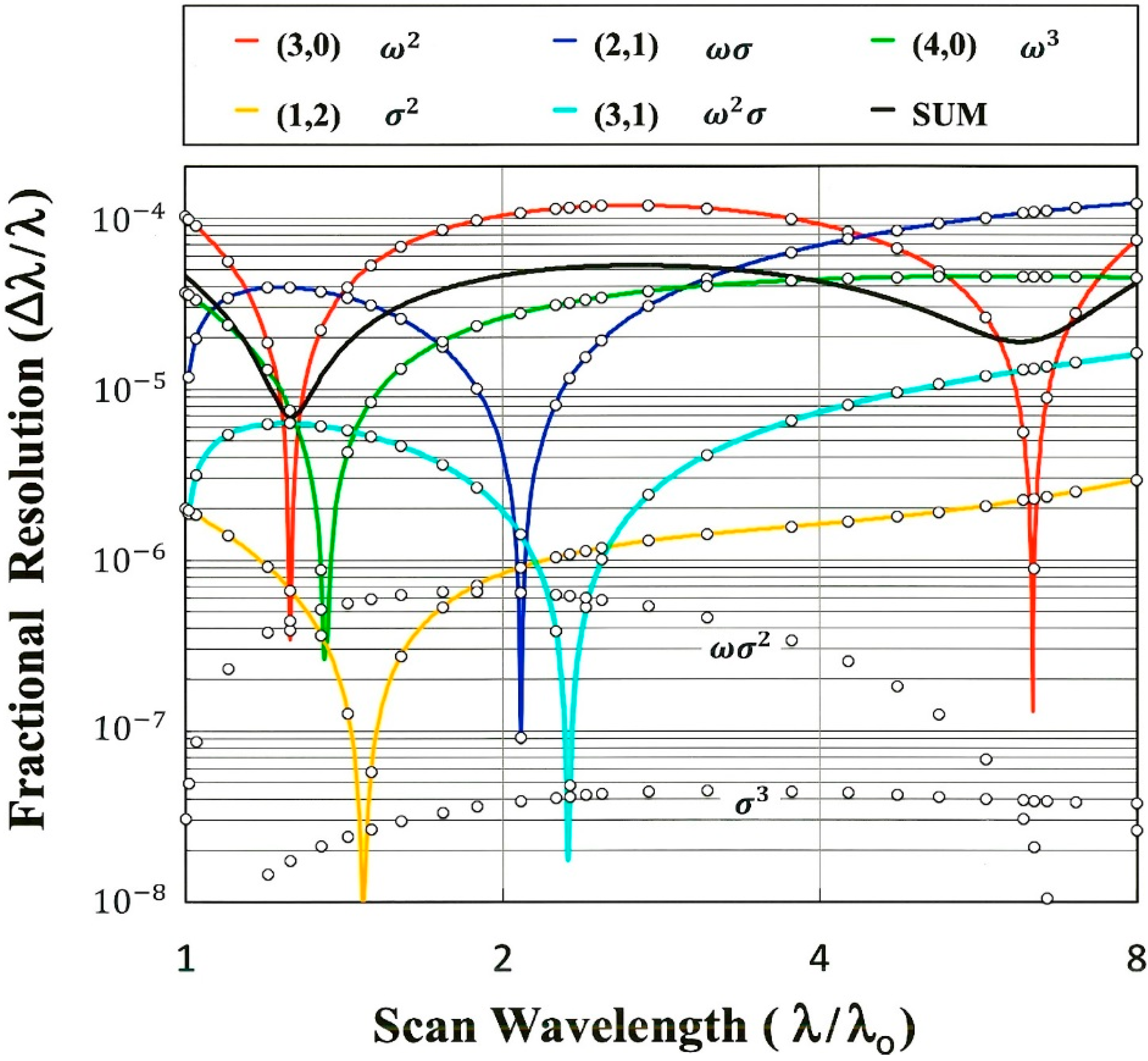{kind=link}
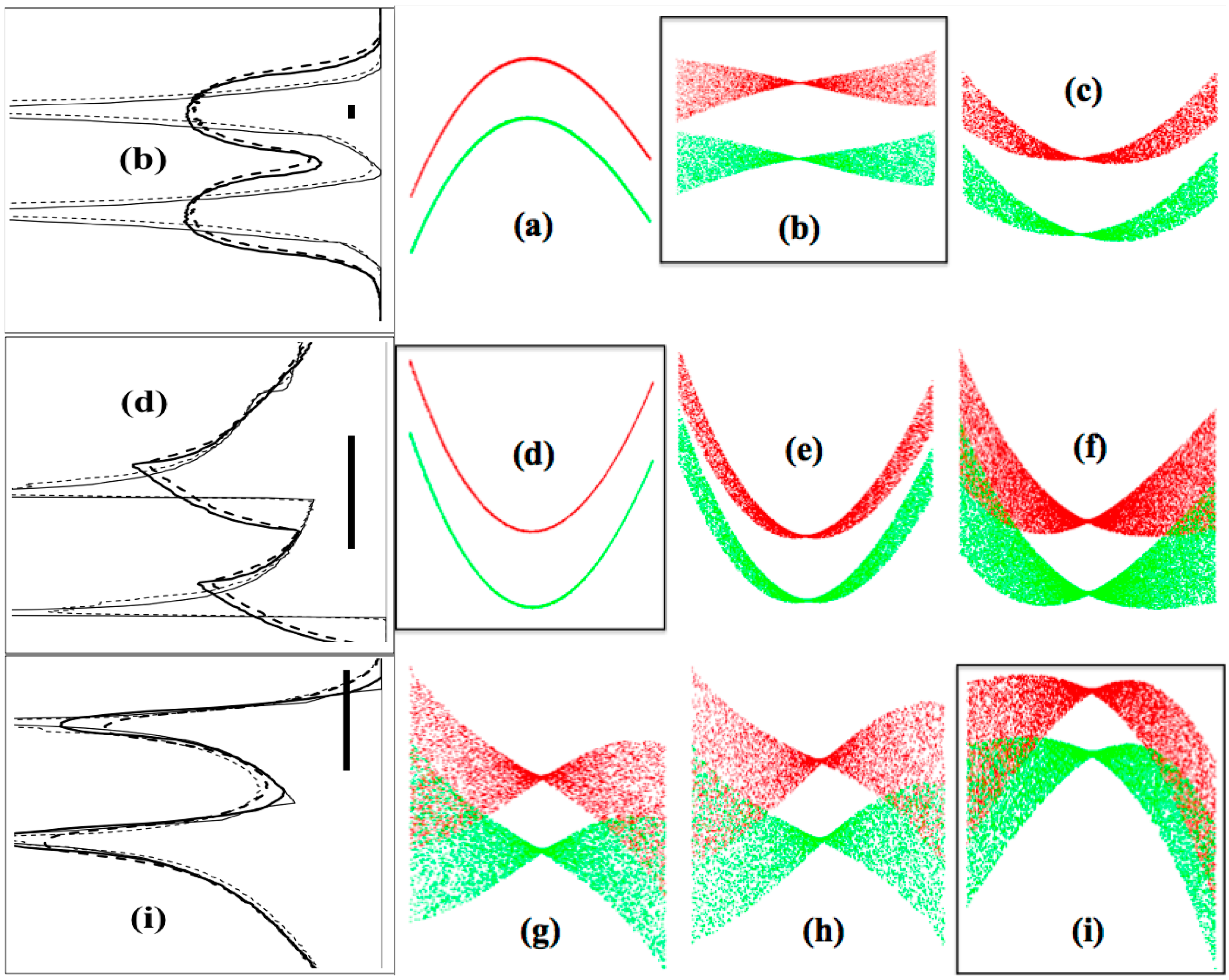{kind=link}
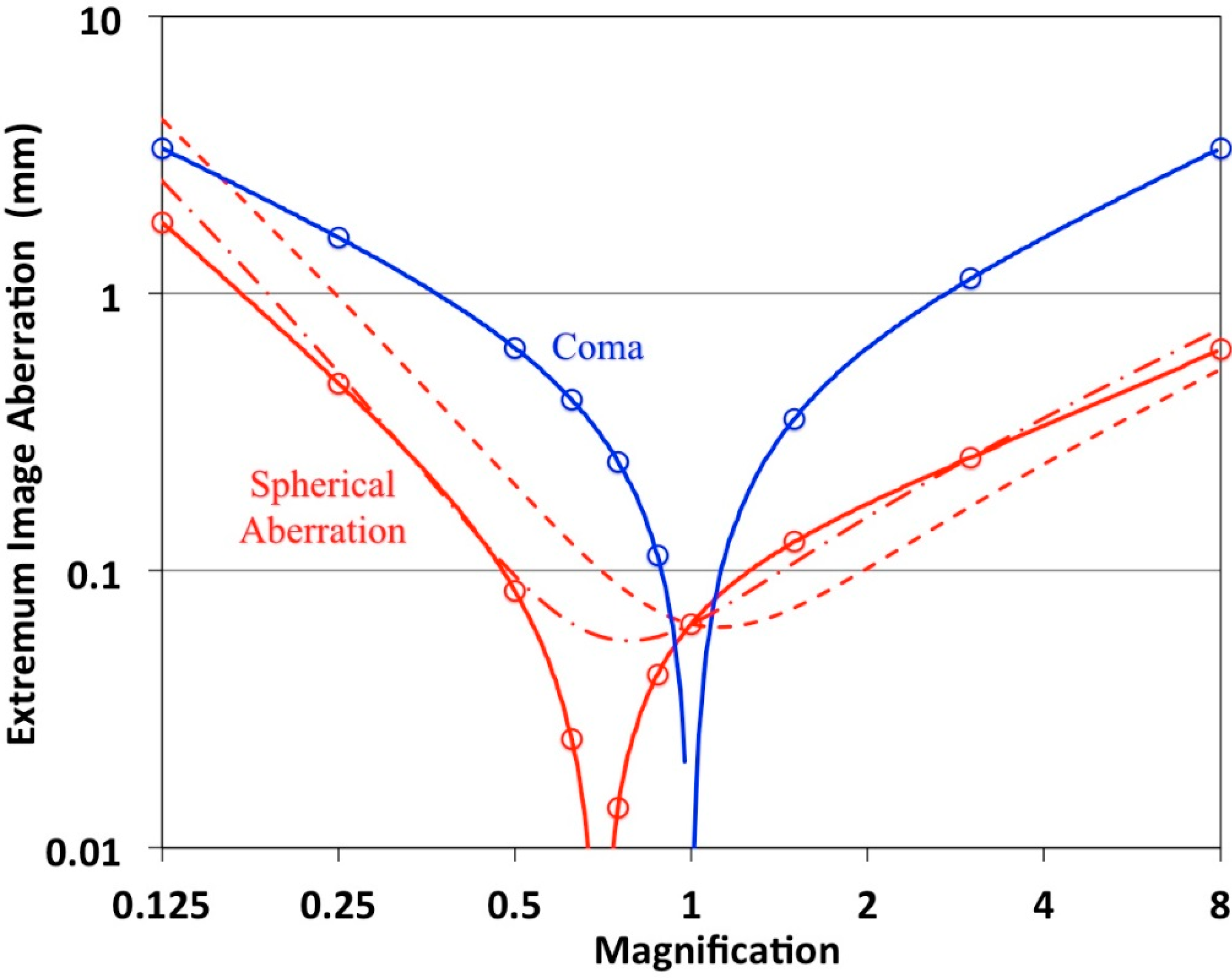{kind=link}
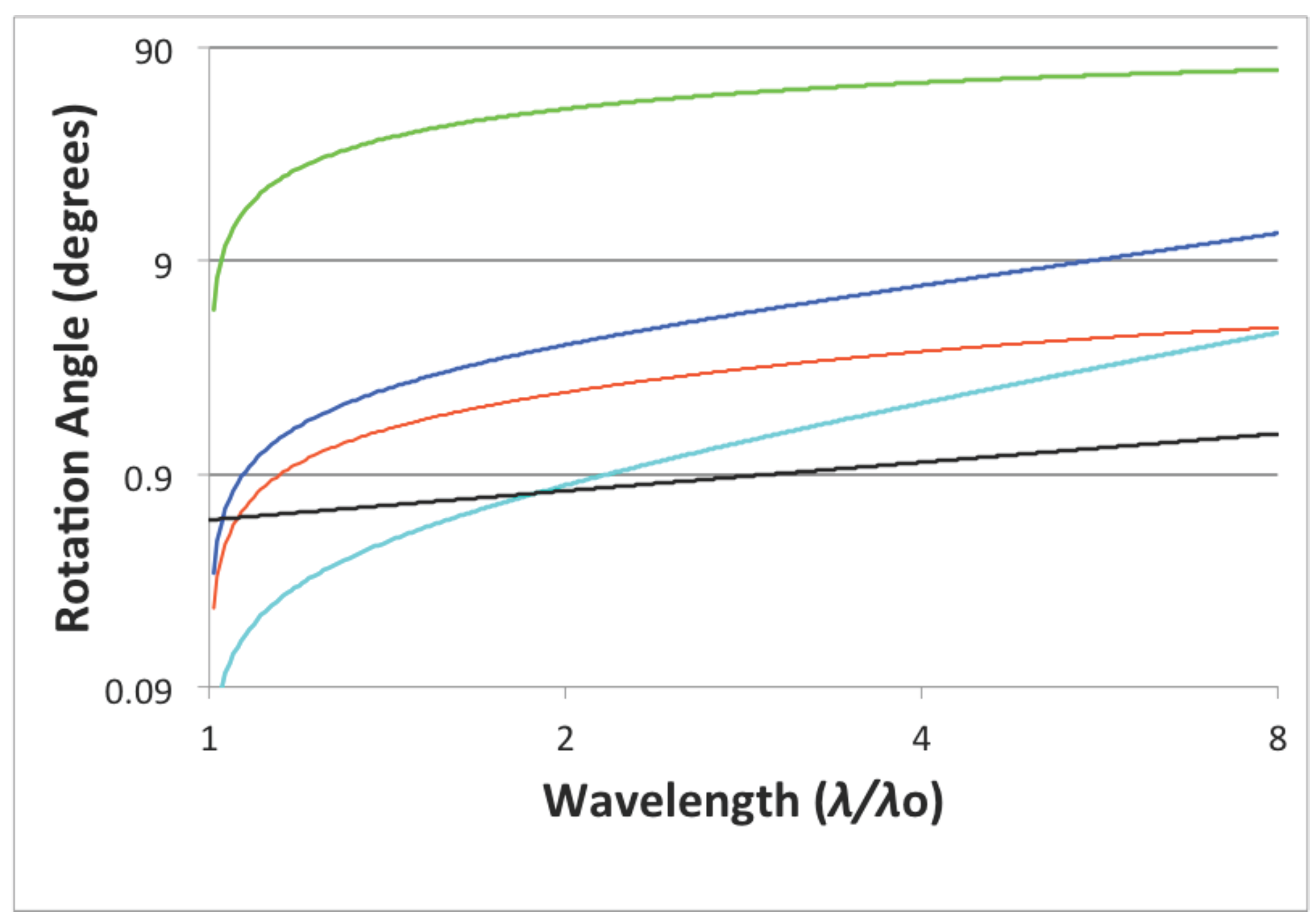{kind=link}