RIS-Aided V2I–VLC for the Next-Generation Intelligent Transportation Systems in Mountain Areas


Abstract
1. Introduction
1.1. Related Works
- No electromagnetic interference: VLC utilizes visible light bands to avoid spectrum competition with RF devices (e.g., Wi-Fi, Bluetooth), making it suitable for electromagnetically sensitive environments.
- High security: Visible light cannot penetrate walls, so the communication range is limited, which effectively prevents the signal from being intercepted or interfered with remotely.
- Green and safe: Existing lighting infrastructures can be retrofitted with both efficient lighting and data transmission capabilities, which saves on deployment costs and energy consumption. Additionally, visible light is not harmful to humans.
- signals are susceptible to masking, resulting in communication breakdowns;
- limited communication distance;
- uplinks are more difficult to implement;
- higher requirements for light source and environment, etc.
- Energy efficiency and cost: The passive nature of RIS makes its energy consumption significantly lower than that of relay, which is especially suitable for large-scale deployment in communication-intensive scenarios such as smart transportation, smart cities, and smart homes.
- Delay and reliability: The passive reflection mechanism of RIS avoids the signal processing delay required by relay nodes. Therefore, RIS is more advantageous in delay-sensitive communication scenarios such as IoV and industrial automation.
- Spatial freedom and concealment: RIS can be embedded in the surface of other objects (e.g., mountains, buildings, etc.) without the need for additional physical space. However, relay requires independent deployment of nodes and additional light sources, which may damage the aesthetics of the environment.
- Mobility: RIS enables low-latency dynamic tracking of mobile transmitters/receivers such as vehicles, while relay is complex for mobility management.
1.2. Motivation and Contributions
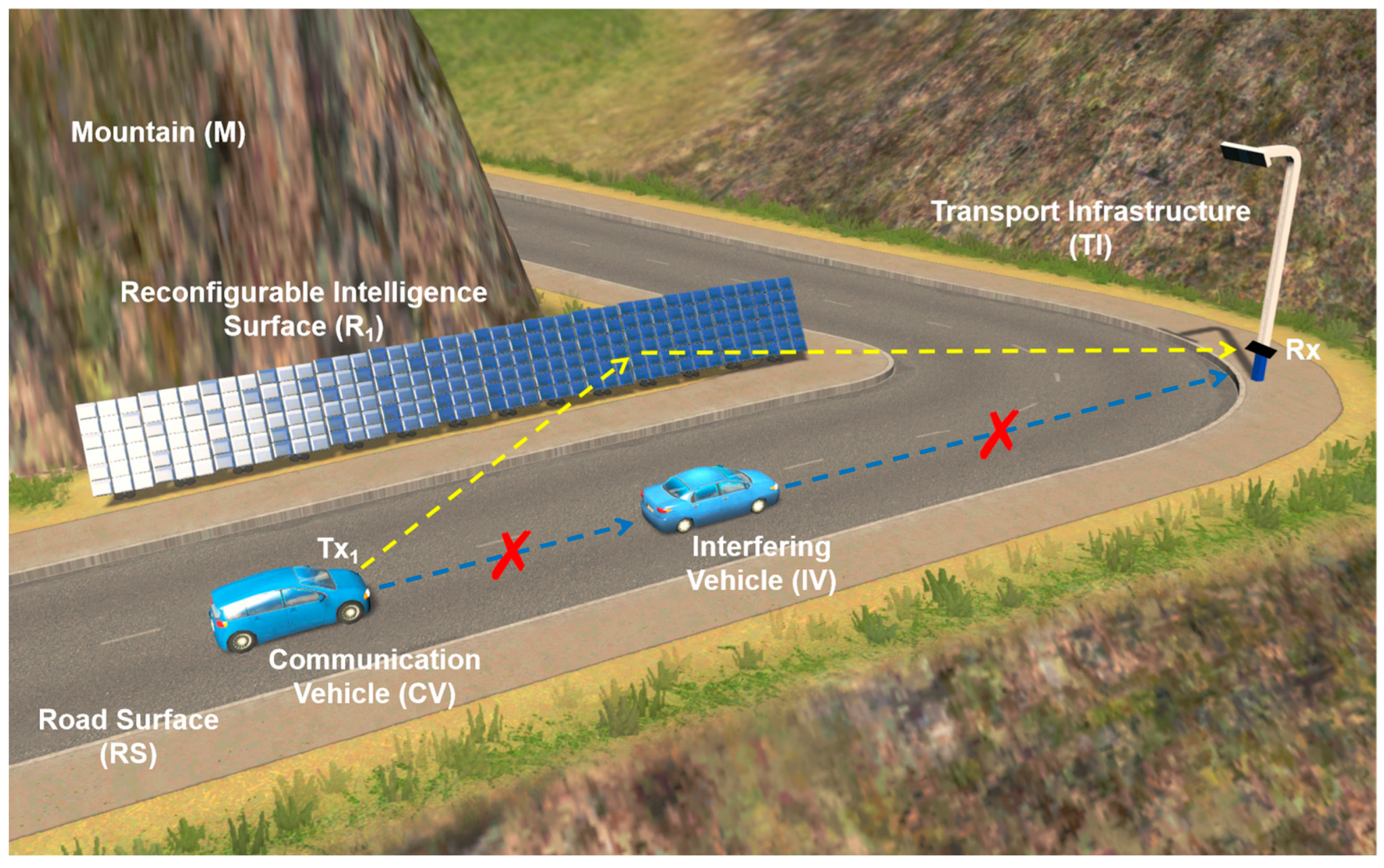
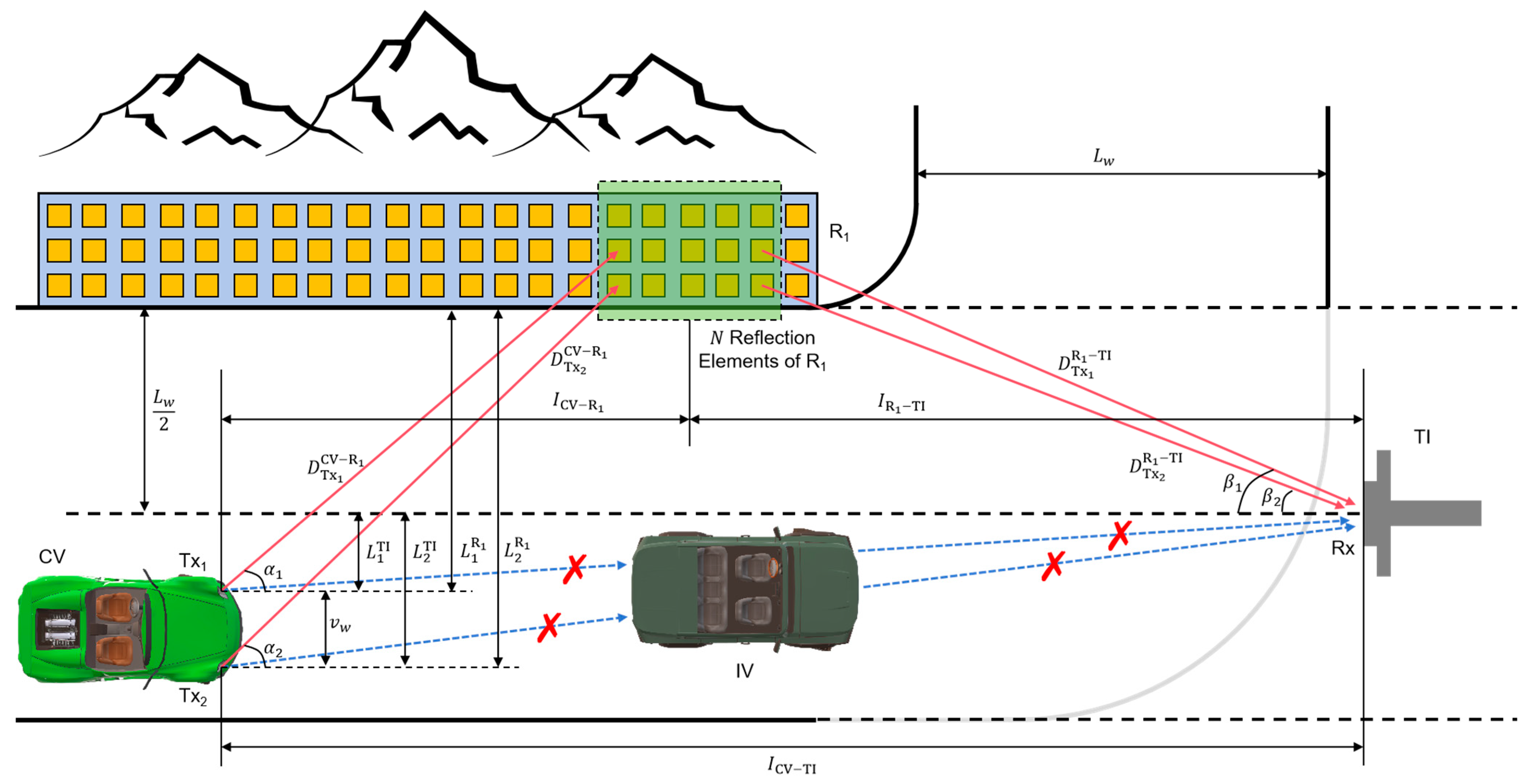
- In order to solve the problem of the LOS link blockage caused by the mobility of vehicles in V2I–VLC systems, an optical RIS-based V2I–VLC transmission scheme is proposed. It should be noted that the interfering vehicle (IV) is located between the communication vehicle (CV) and the transportation infrastructure (TI).
- For practical suitability, the effects of atmospheric turbulence (AT) and weather factors are taken into account in the channel modeling.
- Based on the channel model, the closed-form expressions for the performance metrics, including average path loss, received optical power, channel capacity, and outage probability, are derived in this work.
- Simulation results verify the accuracy of the derived theoretical expression. In addition, the performance of the system is quantitatively compared against its baseline configuration (without RIS) under identical operating conditions.
- The results show that the RIS technique can effectively solve the link blockage problem of the V2I–VLC system and improve the system performance.
1.3. Structure
2. System and Channel Model
2.1. System Model
2.2. Channel Model
3. Path Loss
3.1. Path Loss Model
3.2. Average Path Loss
3.2.1. Average Path Loss of the Light Emitted from
- is located on the left side of the center axis of RS
- 2.
- is located on the right side of the center axis of RS
3.2.2. Average Path Loss of the Light Emitted from
- is located on the left side of the center axis of RS
- 2.
- is located on the right side of the center axis of RS
4. Performance Indicators
4.1. Received Optical Power
4.2. Signal-to-Noise Ratio and Channel Capacity
4.3. Outage Probability
4.4. Energy Efficiency
5. Simulation Results and Discussions
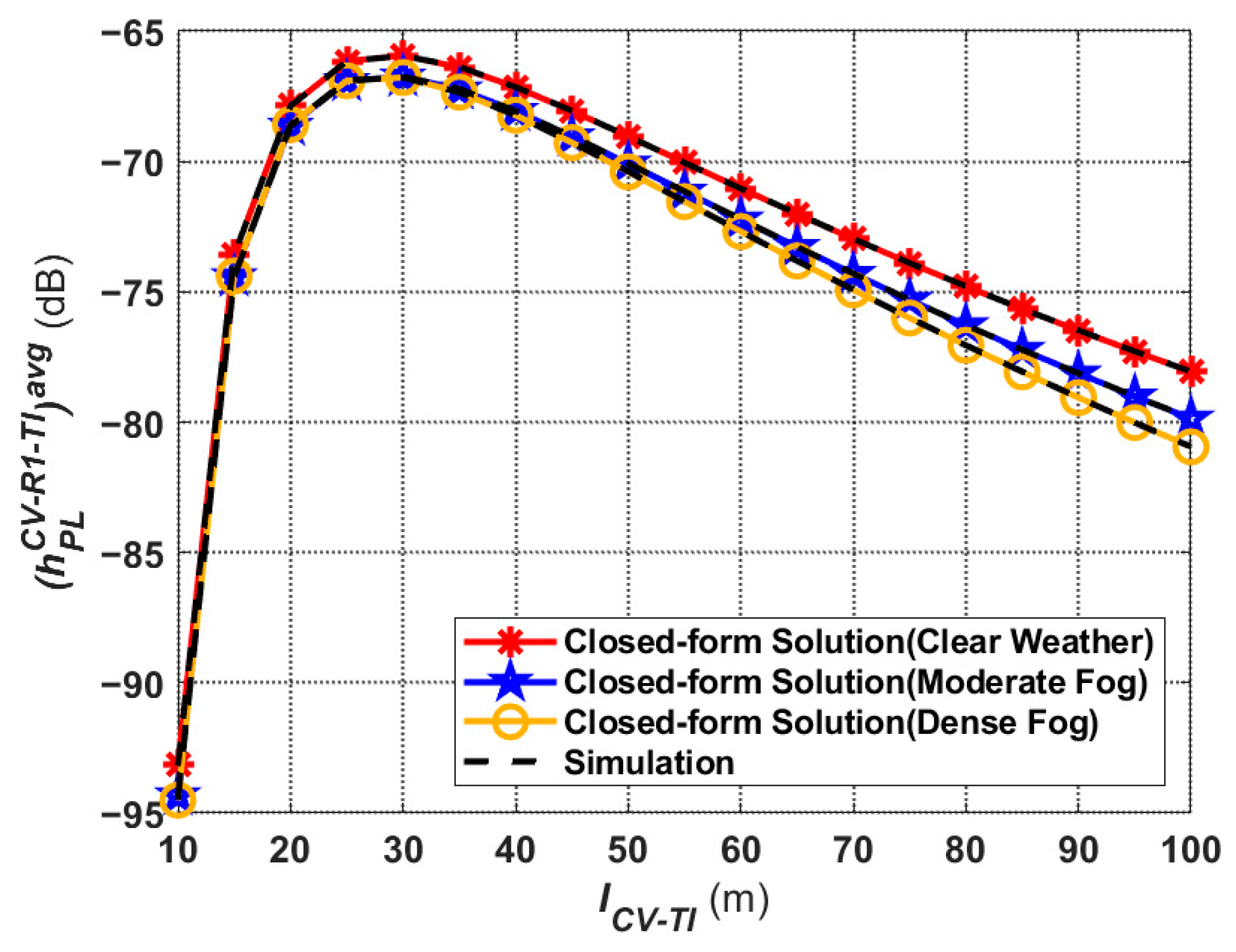
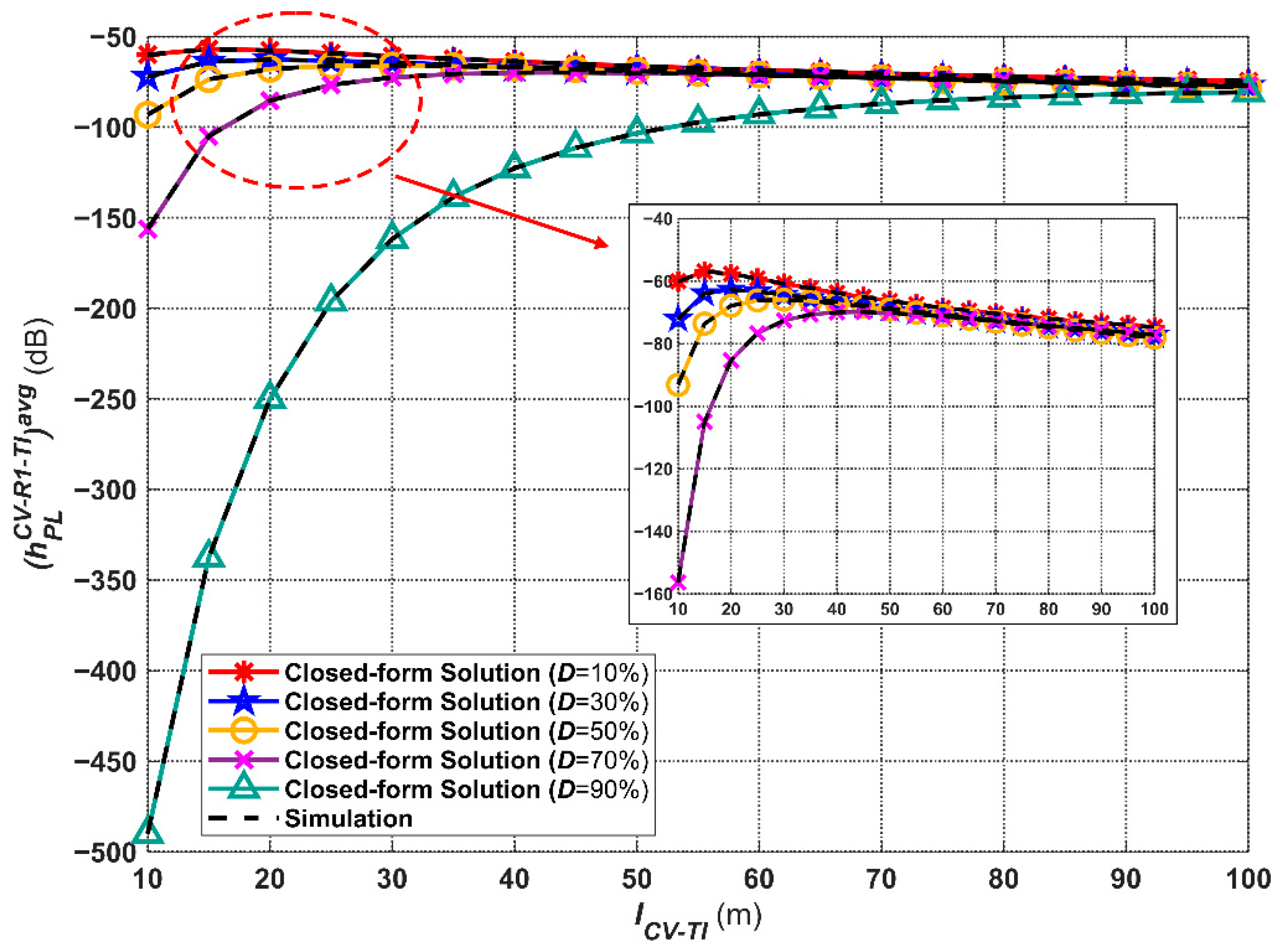
5.1. Average Path Loss
5.2. Received Optical Power
5.3. Channel Capacity
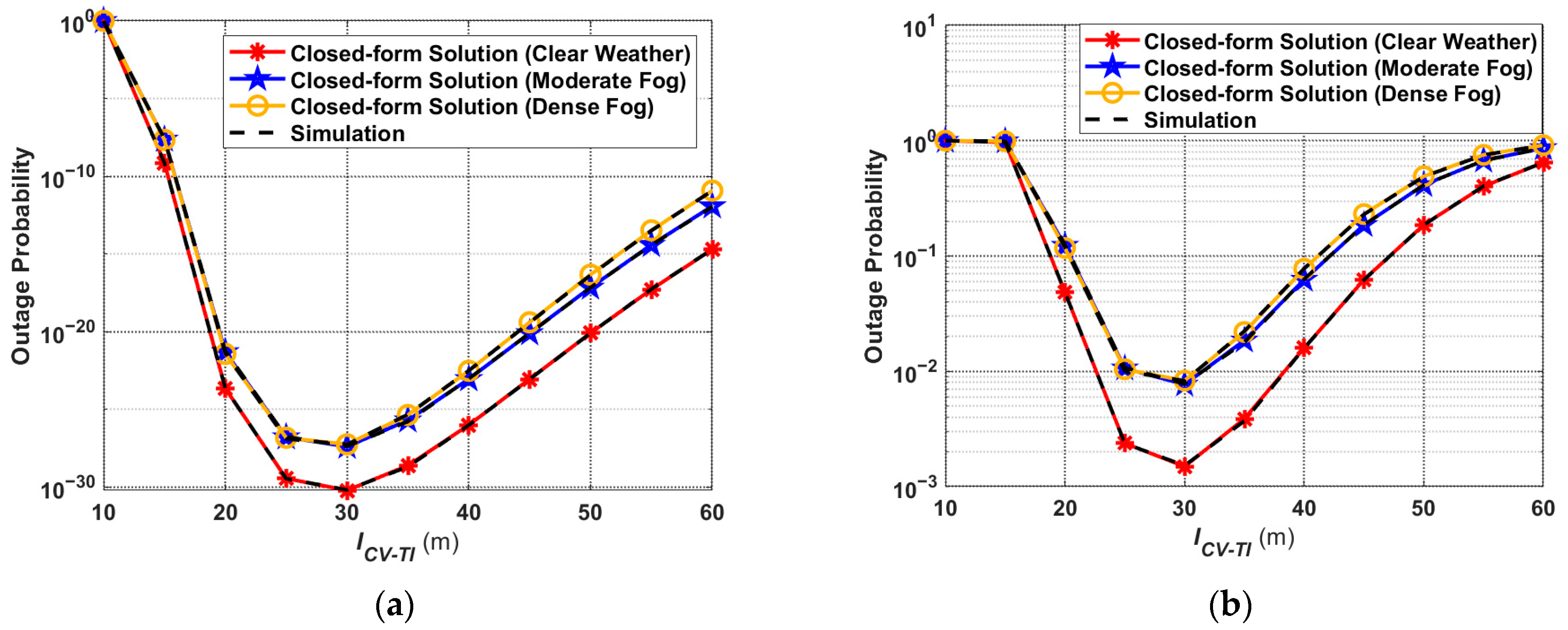
5.4. Outage Probability
5.5. Energy Efficiency
5.6. Summary of Discussions
- In V2I–VLC communication scenarios for mountain road transportation, deploying RISs can effectively solve the key challenge of the LOS link blockage due to the mobility of vehicles.
- The received optical power, channel capacity, outage probability and energy efficiency of this system are highly correlated with the average path loss. Therefore, the system performance can be improved by reducing the system path loss.
- The influence of weather conditions can be concluded as: The system performance is better in clear weather than in foggy weather. In addition, the further the distance between CV and TI, the more significant the effect of the weather conditions on the system.
- The influence of communication distance can be concluded as follows: With the increasing of (within the range of 10 m to 100 m), both the average path loss and the outage probability show a trend of rapid decrease and then gradual increase, while the received optical power and the channel capacity are rapidly increasing and then gradually decreasing. In addition, the effect of on system performance is more significant compared to weather conditions.
- The influence of the deployment location of RIS can be concluded as follows: When , the deployment position of between CV and TI has a greater impact on the system. However, when CV is far away from TI (), the effect of the deployment location of is negligible.
- The influence of the number of RIS reflection elements can be concluded as follows: To attain a targeted energy efficiency, the lower bound of is sharply decreasing and then slowly increasing with the increase in . Further, the value of is smaller under clear weather conditions compared to foggy weather conditions. Furthermore, the advantage of clear weather conditions is more significant as increased.
- Under the same conditions of weather and transmission distance, the higher the value of , the higher the outage probability.
6. Conclusions and Outlook for the Future
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| VLC | Visible light communication |
| ITS | Intelligent transportation system |
| V2V | Vehicle-to-vehicle |
| V2I | Vehicle-to-infrastructure |
| LOS | Line-of-sight |
| RIS | Reflecting intelligent surface |
| AT | Atmospheric turbulence |
| LED | Light-emitting diode |
| OFDM | Orthogonal frequency-division multiplexing |
| PPM | Pulse-position modulation |
| Li-Fi | Light fidelity |
| CMA | Constant modulus algorithm |
| ML | Machine learning |
| E-PPM | Enhanced pulse position modulation |
| IoV | Internet of Vehicles |
| AF | Amplify-and-forward |
| DF | Decode-and-forward |
| UAV | Unmanned aerial vehicle |
| MIMO | Multiple-input multiple-output |
| LC | Liquid crystal |
| SM | Spatial modulation |
| NOMA | Non-orthogonal multiple access |
| SCMA | Scheme combining sparse code multiple access |
| PD-NOMA | Power-domain non-orthogonal multiple access |
| STAR-RIS | Simultaneously transmitting and reflecting intelligent surface |
| DMT | Diversity-multiplexing tradeoff |
| IV | Interfering vehicle |
| CV | Communication vehicle |
| RS | Road surface |
| OOK | On–off keying |
| FOV | Field of view |
| IM-DD | Intensity-modulation and direct-detection |
| Probability density function | |
| SNR | Signal-to-noise ratio |
| SDG | Sustainable development goal |
| AI | Artificial intelligence |
References
- Ahmed, S.K.; Mohammed, M.G.; Abdulqadir, S.O.; El-Kader, R.G.A.; El-Shall, N.A.; Chandran, D.; Rehman, M.E.U.; Dhama, K. Road Traffic Accidental Injuries and Deaths: A Neglected Global Health Issue. Health Sci. Rep. 2023, 6, e1240. [Google Scholar] [CrossRef] [PubMed]
- Thornbury, W.D. Principles of Geomorphology, 1st ed.; John Wiley & Sons: New York, NY, USA, 1969; pp. 16–33. [Google Scholar]
- Wang, F.; Wang, J.; Zhang, X.; Gu, D.; Yang, Y.; Zhu, H. Analysis of the Causes of Traffic Accidents and Identification of Accident-Prone Points in Long Downhill Tunnel of Mountain Expressways Based on Data Mining. Sustainability 2022, 14, 8460. [Google Scholar] [CrossRef]
- Wen, Z.; Zhang, H.; Zhang, R. Safety-Critical Event Identification on Mountain Roads for Traffic Safety and Environmental Protection Using Support Vector Machine with Information Entropy. Sustainability 2021, 13, 4426. [Google Scholar] [CrossRef]
- Yang, W.; Liu, H.; Cheng, G. Modeling and Performance Study of Vehicle-to-Infrastructure Visible Light Communication System for Mountain Roads. Sensors 2024, 24, 5541. [Google Scholar] [CrossRef]
- Shaaban, K.; Shamim, M.H.M.; Abdur-Rouf, K. Visible Light Communication for Intelligent Transportation Systems: A Review of the Latest Technologies. J. Traffic Transp. Eng. (Engl. Ed.) 2021, 8, 483–492. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, Y.; Liu, X.; Ma, S.; Zhang, X.; Fu, Y. Performance Analysis for DF Relay-Aided Visible Light Communication System With NOMA. IEEE Photonics. J. 2022, 14, 1–9. [Google Scholar] [CrossRef]
- Cailean, A.-M.; Dimian, M. Current Challenges for Visible Light Communications Usage in Vehicle Applications: A Survey. IEEE Commun. Surv. Tutor. 2017, 19, 2681–2703. [Google Scholar] [CrossRef]
- Elamassie, M.; Uysal, M. Unified Atmospheric Attenuation Models for Visible and Infrared Wavelengths. J. Opt. Soc. Am. A 2024, 41, 2099–2111. [Google Scholar] [CrossRef]
- Abumarshoud, H.; Mohjazi, L.; Dobre, O.A.; Di Renzo, M.; Imran, M.A.; Haas, H. LiFi through Reconfigurable Intelligent Surfaces: A New Frontier for 6G? IEEE Veh. Technol. Mag. 2022, 17, 37–46. [Google Scholar] [CrossRef]
- Vijayakumari, K.; Anusudha, K. A Comprehensive Study on the Advances and Challenges in Visible Light Communication Technologies. In Proceedings of the 2024 Third International Conference on Smart Technologies and Systems for Next Generation Computing (ICSTSN), Villupuram, India, 18–19 July 2024; pp. 1–6. [Google Scholar]
- Politi, C.T.; Serpi, H.; Tselios, C.; Denazis, S. Integrated Sensing, Communication and Lighting Visible Light Communication for Indoor 6G Networks. In Proceedings of the 2024 24th International Conference on Transparent Optical Networks (ICTON), Bari, Italy, 14–18 July 2024; pp. 1–4. [Google Scholar]
- Zhang, Y.; Ren, J.; Li, K.; Mou, H. Performance Analysis of a Single Light Source Bidirectional Visible Light Communication Reverse Reflection Link. Photonics 2023, 11, 18. [Google Scholar] [CrossRef]
- Wang, H.; Weng, Q.; Liu, H. Research on Signal Equalization Technology Based on Visible Light Communication. J. Phys. Conf. Ser. 2024, 2807, 012042. [Google Scholar] [CrossRef]
- Sliti, M.; Mrabet, M.; Garai, M.; Ammar, L.B. A Survey on Machine Learning Algorithm Applications in Visible Light Communication Systems. Opt. Quant. Electron. 2024, 56, 1351. [Google Scholar] [CrossRef]
- Palavenia, S.; Salauyou, A.; Karneyeva, A.; Zahariev, V. Research on the Atmospheric Channel for Transmitting Information Using Visible Light. In Proceedings of the 2024 Systems of Signal Synchronization, Generating and Processing in Telecommunications (SYNCHROINFO), Vyborg, Russia, 1–3 July 2024; pp. 1–7. [Google Scholar]
- Barber, D.; Tummala, M.; McEachen, J. Daylight Noise Baseline for Outdoor Visible Light Communication with CMOS Sensors. In Proceedings of the 2024 Conference on Lasers and Electro-Optics Pacific Rim (CLEO-PR), Incheon, Republic of Korea, 4 August 2024; pp. 1–2. [Google Scholar]
- Liu, X.; Zhao, G.; Xu, Z.; Guo, L. Channel Analysis and Performance Enhancement for VLC under Smoke Conditions. In Proceedings of the 2024 2nd International Conference on Signal Processing and Intelligent Computing (SPIC), Guangzhou, China, 20 September 2024; pp. 337–340. [Google Scholar]
- Achari, S.; Yang, A.Y.; Goodhead, J.; Swanepoel, B.; Cheng, L. Self-Synchronizing on-off-Keying Visible Light Communication System for Intra- and Inter-Vehicle Data Transmission. SAIEE Afr. Res. J. 2024, 115, 4–15. [Google Scholar] [CrossRef]
- Ugolini, A.; Poli, F.; Croce, D.; Mangione, S. Characterization of Depth-Dependent Loss for Visible Light Propagation in Underwater Optical Wireless Links. In Proceedings of the 2024 Italian Conference on Optics and Photonics (ICOP), Firenze, Italy, 17 June 2024; pp. 1–4. [Google Scholar]
- Haodong, W.; Lincong, Z. Light Source Deployment Study Based on Downhole Visible Light Communication System. J. Phys. Conf. Ser. 2024, 2880, 012004. [Google Scholar] [CrossRef]
- Suying, T.; Lincong, Z.; Ying, L. Research on Visible Light Communication Channel Model in Underground Mines. J. Phys. Conf. Ser. 2024, 2880, 012002. [Google Scholar] [CrossRef]
- Wang, X.; Wang, J.; Wang, H.; Gu, H.; Zhang, Y. In Proceedings of the Visible Light Communication System for Mine Environment. In Proceedings of the International Conference on Computing, Machine Learning and Data Science, Singapore, 12 April 2024; pp. 1–6. [Google Scholar]
- Mensi, N.; Rawat, D.B. On the Performance of Partial RIS Selection vs. Partial Relay Selection for Vehicular Communications. IEEE Trans. Veh. Technol. 2022, 71, 9475–9489. [Google Scholar] [CrossRef]
- Singh, A.K.; Sahana, B.C. Performance Evaluation of STAR-RIS and AF Relay in NOMA-Enabled V2V Networks Fo6, rG. In Proceedings of the 2024 ITU Kaleidoscope: Innovation and Digital Transformation for a Sustainable World (ITU K), New Delhi, India, 21 October 2024; pp. 1–6. [Google Scholar]
- Lv, A.; Zhu, J.; Zou, Y.; Lin, S. Outage Probability Analysis of RIS-Assisted Relay Transmission Systems. In Proceedings of the 2023 International Conference on Wireless Communications and Signal Processing (WCSP), Hangzhou, China, 2 November 2023; pp. 904–909. [Google Scholar]
- Lininger, A.; Zhu, A.Y.; Park, J.-S.; Palermo, G.; Chatterjee, S.; Boyd, J.; Capasso, F.; Strangi, G. Optical Properties of Metasurfaces Infiltrated with Liquid Crystals. Proc. Natl. Acad. Sci. USA 2020, 117, 20390–20396. [Google Scholar] [CrossRef]
- Lee, S.H.; Choi, M.; Kim, T.-T.; Lee, S.; Liu, M.; Yin, X.; Choi, H.K.; Lee, S.S.; Choi, C.-G.; Choi, S.-Y.; et al. Switching Terahertz Waves with Gate-Controlled Active Graphene Metamaterials. Nat. Mater. 2012, 11, 936–941. [Google Scholar] [CrossRef]
- Ayub, M.S.; Adasme, P.; Soto, I.; Rodriguez, D.Z. Reconfigurable Intelligent Surfaces Enabling Future Wireless Communication. In Proceedings of the 2021 Third South American Colloquium on Visible Light Communications (SACVLC), Toledo, Brazil, 11 November 2021; pp. 1–5. [Google Scholar]
- Aboagye, S.; Ngatched, T.M.N.; Ndjiongue, A.R.; Dobre, O.A.; Shin, H. Liquid Crystal-Based RIS for VLC Transmitters: Performance Analysis, Challenges, and Opportunities. IEEE. Wirel. Commun. 2024, 31, 98–105. [Google Scholar] [CrossRef]
- Hasan, S.R.; Chowdhury, M.Z.; Sayem, M.; Jang, Y.M. Integration of Reconfigurable Intelligent Surface and Visible Light Communication Systems for 5G and Beyond Communications. In Proceedings of the 2023 International Conference on Artificial Intelligence in Information and Communication (ICAIIC), Bali, Indonesia, 20 February 2023; pp. 149–153. [Google Scholar]
- Palitharathna, K.W.S.; Maria Vegni, A.; Suraweera, H.A. SLIVER: A SLIPT-Enabled IRS-Assisted VLC System for Energy Optimization. In Proceedings of the 2023 IEEE 20th International Conference on Mobile Ad Hoc and Smart Systems (MASS), Toronto, ON, Canada, 25 September 2023; pp. 143–151. [Google Scholar]
- Zhang, L.; Jia, X.; Tian, N.; Hong, C.S.; Han, Z. When Visible Light Communication Meets RIS: A Soft Actor–Critic Approach. IEEE Wirel. Commun. Lett. 2024, 13, 1208–1212. [Google Scholar] [CrossRef]
- Ndjiongue, A.R.; Dobre, O.A.; Shin, H. Maximal Transmission Rate in Omni-DRIS-Assisted Indoor Visible Light Communication Systems. IEEE Trans. Veh. Technol. 2024, 73, 13956–13961. [Google Scholar] [CrossRef]
- Shen, P.; Lu, L. Reconfigurable Intelligent Surface Enabled Spatial Modulation for Visible Light Communications. IEEE Photonics J. 2023, 15, 1–12. [Google Scholar] [CrossRef]
- Mi, J.; Wang, J.; Sun, S. RIS-Aided Indoor Visible Light Communication System with Spatial Modulation. In Proceedings of the 2024 IEEE International Symposium on Broadband Multimedia Systems and Broadcasting (BMSB), Toronto, ON, Canada, 19 June 2024; pp. 1–6. [Google Scholar]
- Liu, C.; Yu, L.; Yu, X.; Qian, J.; Wang, Y.; Wang, Z. Capacity Analysis of RIS-Assisted Visible Light Communication Systems with Hybrid NOMA. In Proceedings of the 2022 IEEE Globecom Workshops (GC Wkshps), Rio de Janeiro, Brazil, 4 December 2022; pp. 118–123. [Google Scholar]
- Abdeljabar, S.; Eltokhey, M.W.; Alouini, M.-S. Reconfigurable Intelligent Surfaces for Outdoor Visible Light Communications. IEEE Internet Things Mag. 2025, 8, 58–64. [Google Scholar] [CrossRef]
- Sharda, P. Next Generation Based Vehicular Visible Light Communications: A Novel Transmission Scheme. IEEE Trans. Veh. Technol. 2024, 73, 16735–16743. [Google Scholar] [CrossRef]
- Eldeeb, H.B.; Naser, S.; Bariah, L.; Muhaidat, S. Energy and Spectral Efficiency Analysis for RIS-Aided V2V-Visible Light Communication. IEEE. Commun. Lett. 2023, 27, 2373–2377. [Google Scholar] [CrossRef]
- Meghraoui, A.; Tayebi, M.L.; Besseghier, M.; Ho, T.D. Secure Vehicular Visible Light Communications via STAR-RIS: Secrecy Capacity Evaluation. In Proceedings of the 2024 IEEE International Mediterranean Conference on Communications and Networking (MeditCom), Madrid, Spain, 8 July 2024; pp. 68–72. [Google Scholar]
- Meghraoui, A.; Tayebi, M.L.; Besseghier, M.; Eldeeb, H.B.; Muhaidat, S. Performance Evaluation of STAR-RIS-Aided-V2V Visible Light Communications at Road Intersections. In Proceedings of the 2024 3rd International Conference on Advanced Electrical Engineering (ICAEE), Sidi-Bel-Abbes, Algeria, 5 November 2024; pp. 1–6. [Google Scholar]
- Rüb, M.; Grüber, J.; Lipps, C.; Schotten, H.D. Update Rate and Dimension Requirements for Reconfigurable Mirror Arrays in Vehicular Visible Light Communication. In Proceedings of the 2024 IEEE 99th Vehicular Technology Conference (VTC2024-Spring), Singapore, 24 June 2024; pp. 1–6. [Google Scholar]
- Mishra, S.; Maheshwari, R.; Grover, J.; Vaishnavi, V. Investigating the Performance of a Vehicular Communication System Based on Visible Light Communication (VLC). Int. J. Inf. Tecnol. 2022, 14, 877–885. [Google Scholar] [CrossRef]
- Sharda, P.; Bhatnagar, M.R.; Ghassemlooy, Z. Modeling of a Vehicle-to-Vehicle Based Visible Light Communication System Under Shadowing and Investigation of the Diversity-Multiplexing Tradeoff. IEEE Trans. Veh. Technol. 2022, 71, 9460–9474. [Google Scholar] [CrossRef]
- Sharda, P.; Bhatnagar, M.R. Vehicular Visible Light Communication System: Modeling and Visualizing Critical Outdoor Propagation Characteristics. IEEE Trans. Veh. Technol. 2023, 72, 1–14. [Google Scholar] [CrossRef]
- Lapidoth, A.; Moser, S.M.; Wigger, M.A. On the Capacity of Free-Space Optical Intensity Channels. IEEE Trans. Inform. Theory 2009, 55, 4449–4461. [Google Scholar] [CrossRef]
- Yin, L.; Haas, H. Physical-Layer Security in Multiuser Visible Light Communication Networks. IEEE J. Select. Areas Commun. 2018, 36, 162–174. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Variable Name | Clear Weather | Moderate Fog | Dense Fog |
|---|---|---|---|---|
| Extinction Coefficient | 0 | 0.00782 | 0.01565 | |
| Weather Correction Factor 1 | 0.0175 | 0.0172 | 0.0170 | |
| Weather Correction Factor 2 | 0.1585 | 0.1600 | 0.1550 |
| Parameter | Variable Name | Value |
|---|---|---|
| Receive Aperture | 0.02 m | |
| 0.02 m2 | ||
| Road Width | 4.5 m | |
| Vehicle Width | 1.8 m | |
| Power of the Transmitted Information Signal of the th Transmitter | 29 W | |
| DC Power Required for the Lighting | 2 W | |
| 0.85 W/A | ||
| Electro-Optical Conversion Coefficient of Txs | 0.44 W/A | |
| Photoelectric Conversion Coefficient of Rx | 1 W/A | |
| Gain of the PD-based Rx | 50 | |
| Gain of the filter of Rx | 1 | |
| System Bandwidth | 10 MHz | |
| Detector Noise Figure | 0.2 | |
| Load Resistance | 50 Ω | |
| Background Solar Radiation Current | 1.6 × 10−3 A | |
| Variance of the Lognormal Distribution | 0.2 | |
| Power Consumed by Each RIS Reflection Element | 15 dBm | |
| Power Consumed by the Circuits for Transmitting and Receiving Signals | 20 dBm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, W.; Liu, H.; Cheng, G.; Su, Z.; Fan, Y. RIS-Aided V2I–VLC for the Next-Generation Intelligent Transportation Systems in Mountain Areas. Photonics 2025, 12, 664. https://doi.org/10.3390/photonics12070664
Yang W, Liu H, Cheng G, Su Z, Fan Y. RIS-Aided V2I–VLC for the Next-Generation Intelligent Transportation Systems in Mountain Areas. Photonics. 2025; 12(7):664. https://doi.org/10.3390/photonics12070664
Chicago/Turabian StyleYang, Wei, Haoran Liu, Guangpeng Cheng, Zike Su, and Yuanyuan Fan. 2025. "RIS-Aided V2I–VLC for the Next-Generation Intelligent Transportation Systems in Mountain Areas" Photonics 12, no. 7: 664. https://doi.org/10.3390/photonics12070664
APA StyleYang, W., Liu, H., Cheng, G., Su, Z., & Fan, Y. (2025). RIS-Aided V2I–VLC for the Next-Generation Intelligent Transportation Systems in Mountain Areas. Photonics, 12(7), 664. https://doi.org/10.3390/photonics12070664