1. Introduction
In gravitational wave measurement systems, the relative rotation between test masses introduces angular deviations that have an impact on the accuracy of optical range difference measurements. This field has numerous mature systems [
1,
2]. In 2016, American scientists successfully detected for the first time the gravitational wave signals generated by the merger of cosmic double black holes through the ground-based gravitational wave observation system LIGO (Laser Interferometer Gravitational-Wave Observatory) [
3]. Concurrently, the National Aeronautics and Space Administration (NASA) and the European Space Agency (ESA) have announced their joint undertaking of the Laser Interferometer Space Antenna program, LISA (Laser Interferometer Space Antenna) [
4,
5]. The distance between the test masses is 5,000,000 km, and the angular measurement accuracy is better than 20 nrad/Hz
1/2 in the low frequency band of 0.1 mHz~100 mHz [
6]. NASA and the German Aerospace Center (DLR) have announced the GRACE Follow-On satellite mission, which utilizes an interstellar distance of 220 km and an angular pointing measurement accuracy of better than 1 μrad/Hz
1/2 at the 0.1 Hz frequency [
7,
8,
9]. The Taiji program, which is overseen by the Chinese Academy of Sciences, with a distance of 3,000,000 km between satellites, has developed interferometers in the 0.1 Hz~1 Hz band that can limit noise to 10 pm/Hz
1/2 [
10,
11].
The integration of communication and tracking in space laser communication systems represents a prevailing trend in future development. The system employs a beaconless design, eschewing the 800 nm beacon laser beam and utilizing a 1550 nm communication laser beam for concurrent high-rate data transmission, high-accuracy beam angle detection, and tracking. The distance between satellites in a laser communication link can span thousands of kilometers, and the relative motion between satellites and other factors can introduce angular deviations to the signal beam at the receiving end. This can compromise the performance of the system. To ensure the stability of the laser link, high-sensitivity detection and the high-accuracy measurement and compensation of the angular deviation of the weak signal are essential. In addition, the reconfigurability of laser communication terminals has emerged as a pivotal area of research in programs such as the U.S. Space-Based Adaptive Communication Node (Space-BACN) [
12]. The aim of this study was to realize multiple wavelength switching and repeatable configurations in the range of 1530–1565 nm. When the communication wavelength changes by 0.01 nm, the corresponding amount of optical frequency change is 1.25 GHz. The frequency of beat note signals in the laser heterodyne interferometric angular measurement system is up to 20 MHz. The isolation of different communication wavelengths is realized by adjustment of the optical frequency of the local oscillation laser beam, which can be better applied to the multi-node laser communication network system. Therefore, it is of great significance to develop an angle measurement scheme with high detection sensitivity and high accuracy for future laser communication terminal design work.
A four-quadrant detector (QD) was compared with a conventional charge-coupled device (CCD) and a position sensitive detector (PSD). QDs have a MHz bandwidth, simpler signal processing circuits, and higher measurement accuracy and sensitivity, which make them capable of correctly receiving complete waveforms and accurately solving phase information for MHz-scale beat-frequency continuous wave signals. Therefore, a QD was chosen as the photodetector of the heterodyne coherent angle measurement system. The traditional QD angle measurement system adopts the direct detection technology, which is based on the received signal amplitude information for the spot center position solution and is converted to the angle through the trigonometric function. However, in the actual system, after long-distance transmission to the receiving end of the signal, the laser beam power is weak, which will lead to a substantial deterioration in the signal-to-noise ratio. Thus, the position and angle detection accuracy of the direct detection method is reduced. On this basis, a DWS-based heterodyne coherent angle measurement technique was further proposed, which performs angle solving based on the signal phase. Compared with the traditional direct detection method, the heterodyne coherent angle measurement can obtain a higher accuracy and system signal-to-noise ratio [
13,
14,
15]. The wavefront curvature of the measured light beam can be increased through the lens, significantly improving the detection sensitivity and is being well-applied to high-precision multi-degree-of-freedom interferometers [
16]. For the phase angle conversion process, an angle measurement algorithm based on improved differential evolution was proposed, and a coherent laser angle measurement desktop experiment was constructed for verification, with a measurement error better than 5 μrad [
17]. Aiming at the problems of a low accuracy of direct detection technology and difficult integration with a high-speed coherent communication system, an interstellar laser communication angular displacement detection method based on coherent light was proposed. A laser communication link was built under laboratory conditions for testing and validation. The angular displacement detection accuracy was 0.6 μrad (σ) with a detection sensitivity of −43.93 dBm [
18].
Based on the above analysis, this paper proposes a four-quadrant heterodyne coherent angle measurement technique with μrad accuracy and nW detection sensitivity. Firstly, a set of heterodyne coherent angle measurement methods is proposed, a theoretical model established, a phase-locked loop was adopted as the core of the design, and the conversion relationship between the phase and angle was further deduced. Secondly, the Monte Carlo method was employed for the first time to simulate the whole optoelectronic process of the heterodyne coherent angle measurement and analyze the performance of angle measurement with the phase-locked loop model. Finally, an experimental system was built to compare the quantitative differences between the heterodyne coherence angle measurement and direct detection methods using the same four-quadrant detector (QD). The influence of parameters such as the power of the local oscillator laser beam and the loop bandwidth on the angle measurement performance was also tested and analyzed.
2. Principle
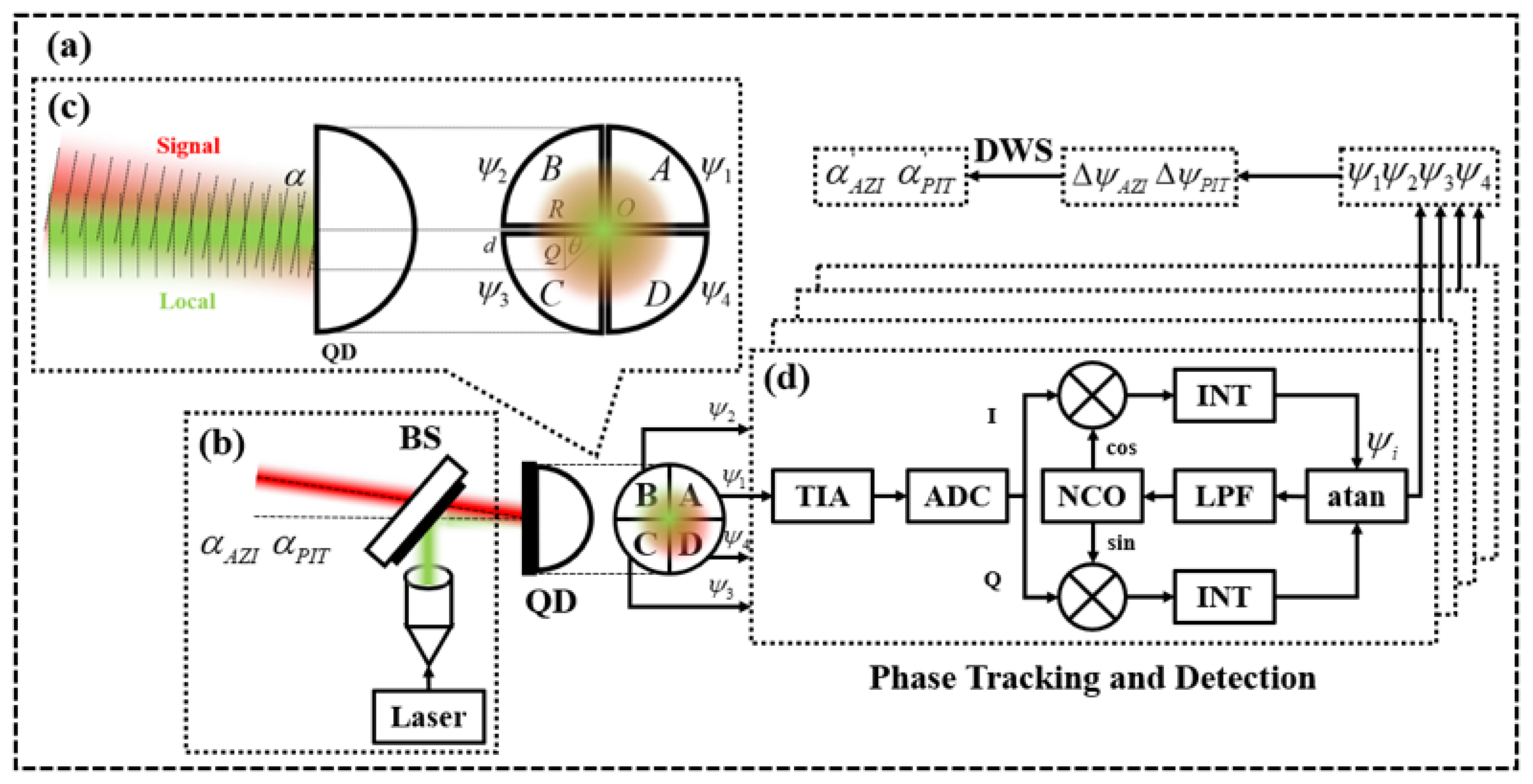
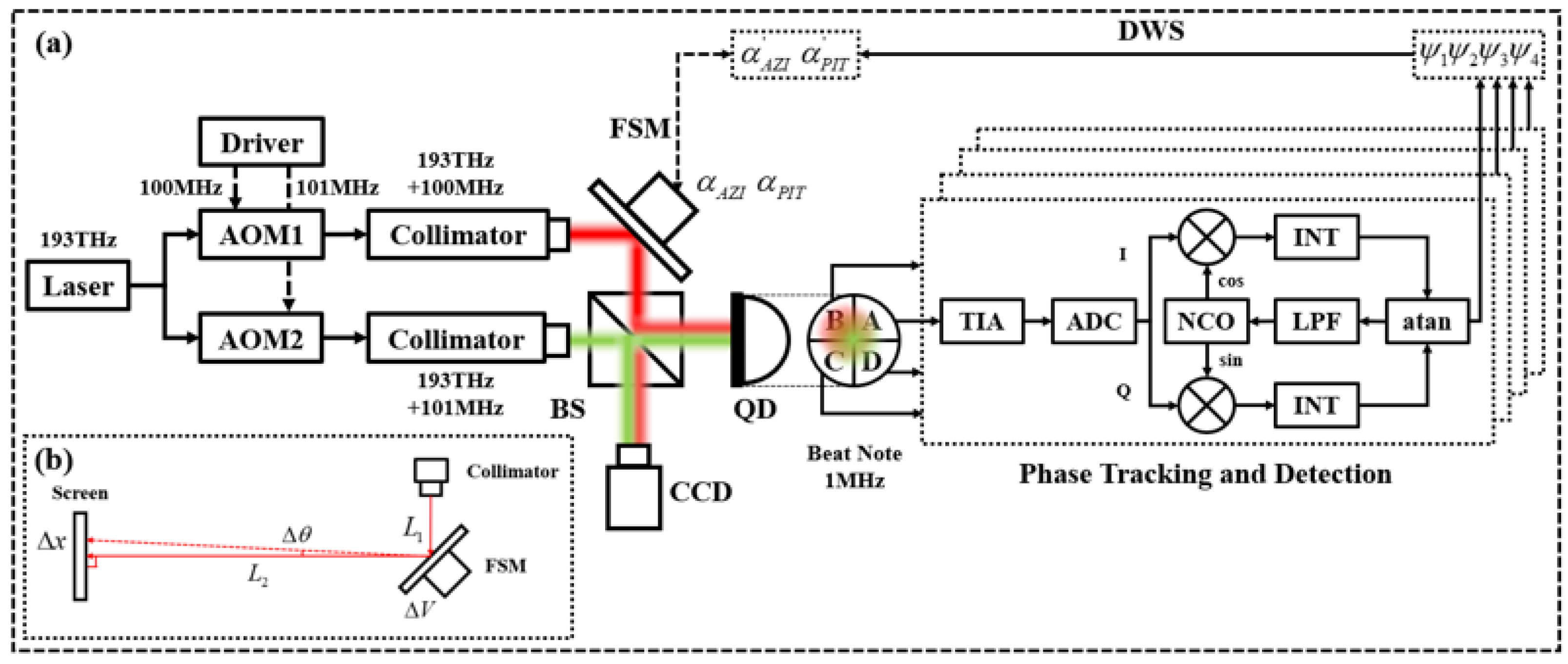
The block diagram illustrating the principle flow of the heterodyne coherent angle measurement is shown in
Figure 1a. At the optical front end, as shown in
Figure 1b, the signal laser beam (red beam) and the local oscillation laser beam (green beam) propagate to the QD photosensitive surface through the 50:50 beam splitter, and there is an initial frequency difference between the two laser beams, which generates a beat frequency signal corresponding to the frequency difference. As shown in
Figure 1c, at the QD photosensitive surface, the local oscillation laser beam is collimated into the incident beam, and the relative rotation or motion between the terminals causes the signal laser beam to have an incident angular deviation
αAZI and
αPIT along the azimuth and pitch axes, respectively. According to the principle of the angular phase conversion of DWS, the angular deviation of the signal laser beam makes the phase of the beat frequency signal in each quadrant of the QD differ from that of
ψ1,
ψ2,
ψ3, and
ψ4. Each quadrant of the beat frequency signal is then entered into the phase tracking and detection module for high accuracy measurement of the phase, as shown in
Figure 1d. The signal is first processed by a signal conditioning circuit, followed by amplification through a transimpedance amplifier (TIA), and then converted from analog to digital using an analog-to-digital converter (ADC). Thereafter, the signal enters the Costas phase-locked loop, a specialized circuit dedicated to phase tracking and detection. This loop comprises a phase discriminator (multiplier), an integrator (INT), a loop filter (LPF), and a numerically controlled oscillator (NCO). By adjusting the output frequency of the NCO signal, the NCO tracks the phase of the beat frequency signal, obtains the phase
ψ1,
ψ2,
ψ3, and
ψ4 of the beat frequency signal in each quadrant at the same moment, and solves for the phase difference Δ
ψAZI and Δ
ψPIT. Finally, through the DWS phase-angle conversion process, the phase difference is converted to angle
α′
AZI,
α′
PIT, thus realizing the measurement and compensation of the initial incidence angle deviation
αAZI,
αPIT of the signal laser beam.
First, the spatially coherent mixing process of the optical front-end was analyzed, as showed in
Figure 1b. In accordance with the coherence condition, the signal and the local oscillation laser beam were configured to be linearly polarized laser beams with parallel polarization vectors. It was observed that there was a certain degree of deviation in the wavefront phase of the signal laser beam. The two laser beams were then subjected to a process of coherent mixing at the QD photosensitive plane, with the vector
r representing the QD plane. The signal and the local oscillation laser beam light fields
ES (
r,
t) and
ELO (
r,
t) can be expressed as Equation (1), where the variables
|ES(
r)
| and
|ELO(
r)
| represent the light intensity,
ψS(
r) and
ψLO(
r) represent the wavefront phase generated by the incident angular deviation,
ωS and
ωLO represent the angular frequency,
φS and
φLO represent the initial optical phase, and
t represents the time [
6].
The received optical power
P(
t) of the QD photosensitive surface can be expressed as Equation (2), where
PS,
PLO are the DC components, QD denotes the detector photosensitive surface area, and
ρ,
ε denote the transmittance and reflectance of the optical beam splitter (0 <
ρ,
ε < 1), respectively. The beat frequency signal is the AC component,
ωhet =
ωS −
ωLO denotes the angular frequency difference, Δ
ψ(
r)
= ψS(
r) −
ψLO(
r) denotes the wavefront phase difference, and Δ
φ =
φS −
φLO denotes the initial optical phase difference.
After the triangular transformation of the AC signal, the received optical power
P(
t) can be expressed as Equation (3), where
γ denotes the heterodyne efficiency, which is used as a measure of coherent receiver performance. It is expressed in the QD photosensitive surface as the proportion of the overlapping area of the light spot presented by the signal and the local oscillation laser beams. Δ
ϕ denotes the phase difference information of the two laser beams. For a 50:50 optical beamsplitter,
ρ =
ε = 1/√2.
where the
I and
Q variables in Equation (3) are associated with the amount of wavefront phase difference Δ
ψ(
r) caused by the angular deviation between the laser beams. This can reflect the changes in amplitude and phase of the beat frequency signal. The expressions of the
I and
Q variables are shown in Equation (4), where dA denotes the integral operation carried out on the QD surface.
After substituting the above parameters, the received optical power
P(
t) and photocurrent
I(
t) in each quadrant of the QD can be expressed as Equation (5), where
ξ denotes the photodiode efficiency,
qe denotes the electron charge (1.602 × 10
−19 C),
λ denotes the laser wavelength,
h denotes the Planck constant (6.626 × 10
−34 J*s),
c denotes the speed of the beam,
η denotes the photodiode responsivity, and
N denotes the number of detector quadrants.
In actual scenarios, the incident angle deviation of the signal laser beam will cause differences in the phase information of the signals received by different quadrants of the detector. By combining the phase difference and DWS technology to calculate the angle deflection amount, the measurement and compensation of the incident angle deviation of the signal laser beam can be achieved.
A detailed derivation of the DWS angular phase conversion process is given below, based on
Figure 1c. This was first analyzed based on the plane wave model in the QD photosensitive surface. The local oscillation laser (green beam) is incident collimated, the signal laser (red beam) has an incident angular deviation
α, and the spot radius is
R. The QD origin is
O, and the channel width is
d. For any point
Q in the spot area, the distance from the origin is
y, and the angle between
OQ and the detector’s azimuthal axis is
θ.
For the pitch axis direction, the optical range difference between point
Q and point
O is
y* ×
sinθ ×
sinα, and the corresponding phase difference is
y ×
sinθ ×
sinα × 2
π/
λ [
19]. Integral averaging of the phase difference between each point and point
O in each quadrant of the spot area yields the output wavefront phase value
ψ. The expressions for the output wavefront phase values
ψA,
ψB,
ψC, and
ψD in each quadrant are as follows.
The relationship between the pitch axis phase difference Δ
ψPIT and the angular deflection α is established by the wavefront phase in each quadrant and can be expressed as Equation (7). A similar relationship exists between the azimuthal phase difference Δ
ψAZI and the angular deflection α.
In the small angle deflection case, the approximation is:
sinα≈
α. The relationship between the QD wavefront phase difference Δ
ψ and the angular deflection
α can be expressed as Equation (8). This relation is mainly affected by the gap width
d and spot radius
R.
In the heterodyne interferometry system in the field of actual gravitational wave detection, after the signal laser beam is transmitted over an ultra-long distance in space, it will approximately follow a flat-top distribution when it reaches the detector at the receiving end. The local oscillator laser beam will follow a Gaussian distribution when reaching the detector at the receiving end. The DWS signal will be affected simultaneously by the far-end flat-top beam and the local Gaussian beam [
20,
21].
The laser source is located at the origin in the spatial Cartesian coordinate system, and the z-axis represents the direction of transmission of the beam perpendicular to the photosensitive surface of the detector. The complex amplitude of the local Gaussian beam traveling along the Z-axis can be expressed as Equation (9) [
22], where
A0,
zg,
ω(
zg), and
R(
zg) represent the amplitude, propagation distance of the Gaussian beam, spot radius, and wavefront radius of curvature at position
zg, respectively. The term
φ(
zg) denotes the additional optical phase.
The complex amplitude of the distal flat-top beam traveling along the z-axis can be expressed as Equation (10), where
E0 denotes the amplitude,
ωf denotes the spot radius of the flat-top beam in the detector’s photosensitive plane, and
zf denotes the distance traveled by the flat-top beam.
In a practical system, the signal laser beam from the far end will be truncated by the circular aperture of the optical antenna at the receiving end, thus presenting a circular spot pattern in the QD photosensitive surface. To simplify the analysis, it was assumed that the signal laser beam was truncated by a square aperture tangent to the actual circular aperture, causing it to present a square spot pattern in the QD. This approximation did not change the results of the qualitative analysis.
To illustrate the derivation and analysis of the resulting mathematical analytical equation, let us consider the angular deflection of the signal laser beam along the azimuthal axis. It can be shown that this equation will also be applicable to the pitch axis direction. The complex amplitudes of the heterodyne interferometric signals in the left and right half quadrants of the QD can be expressed as Equation (11), respectively, where
α denotes the deflection angle of the signal laser beam along the azimuth axis.
where
C1,
C2,
C3, and
C4 have the following expressions, respectively.
According to the above equation, the DWS signal can be expressed as follows.
As demonstrated by the derivation results outlined above, it can be concluded that the DWS signal is predominantly influenced by the signal laser beam deflection angle α, the QD channel width d, the spot radius R, and the offset of the signal spot center of mass in the QD photosensitive surface x0.
Subsequent to the conversion of the angular deflection into a phase difference in the QD photosensitive surface, the phase tracking and detection module utilizes a Costas phase-locked loop to measure the received signal phase, denoted as
ψS, with a high degree of accuracy, as shown in
Figure 1d. Within a specific quadrant of the QD, the input signal
VS(
t) of the phase-locked loop can be expressed as follows:
The NCO in the phase-locked loop generates in-phase
VNCOI(t) and quadrature branch signals
VNCOQ(
t) (
ωNCO ≈
ωhet) of a frequency that is similar to the input signal based on the initial frequency word.
VNCOI(
t) and
VNCOQ(
t) can be expressed as Equation (15). The phase tracking is achieved through constant feedback adjustment
ωNCO during the loop locking process.
The NCO in-phase and quadrature signals are multiplied, integrated, and averaged with the input signals to obtain
VINTI(
t) and
VINTQ(
t), respectively.
VINTI(
t) and
VINTQ(
t) can be expressed as Equation (16). Subsequently, interference terms such as
ωhet +
ωNCO in the multiplication result are filtered out, and the
ωhet −
ωNCO containing the phase difference are retained. This process is analogous to a low-pass filter in a conventional phase-locked loop.
After completing the integration for the mean value, the output signals of the in-phase and quadrature branches perform the
atan operation to directly solve for the phase difference information
ψi − ψNCO. The phase difference between the input signal and the NCO signal at this point is obtained and used as the input signal of the loop filter, and the NCO frequency word is adjusted accordingly. The phase difference solving process is shown in Equation (17).
After this, by constantly combining the current phase difference ψi − ψNCO to the NCO frequency ωNCO feedback adjustment. This process gradually leads to the convergence of the phase difference to 0. Following the completion of phase tracking, the NCO index serves as the current moment of the phase information. This is then utilized in the subsequent phase angle conversion step, thereby facilitating the high accuracy measurement of the angle.
In a phase-locked loop, the input signal
VS(
t) will contain additive Gaussian white noise
n(t) with mean 0 and variance
σ2, and the phase jitter variance
σ2ψn generated by this noise can be expressed as Equation (18), where
SNR denotes the input signal-to-noise ratio, and
Psig and
Pn denote the signal and noise power, respectively.
Gaussian white noise
n(
t) will introduce phase noise containing systematic and random errors to the phase-locked loop. In this case, the systematic error is accompanied by the phase higher-order dynamic stress of the input signal, and the random error is generated by the noise factor. Combining the one-sided power spectral density
N0 of the noise
n(
t) and the input signal power
Pin of the phase-locked loop, the conversion of the phase jitter variance
δ2ψn generated by the random error to the equivalent loop bandwidth
Bn can be expressed as Equation (19) [
23]. It can be seen that the increase in the loop bandwidth
Bn will lead to a decline in the loop phase locking performance, thereby affecting the angle measurement performance. The main reason is that excessive adjustment of the loop leads to the introduction of random errors. Meanwhile, if
Bn is too small, it will also make it difficult for the loop to correctly detect the signal phase. The main reason is that the adjustment of the loop being too small leads to the introduction of systematic errors. In this part, further analysis is carried out in combination with the relevant data in the experimental system.
Furthermore, the system noise sources and
SNR are also influenced by the power of the local oscillation laser beam
PLO. The noise sources of the heterodyne coherent angular measurement system primarily comprise the thermal noise
Pth generated by the detector device, the shot noise
Psh generated by the local oscillation laser beam, and the laser relative intensity noise
PRIN generated by the laser. The power level of each noise can be expressed as Equation (20). In this equation,
k denotes the Boltzmann constant,
T denotes the Kelvin temperature,
B denotes the detection bandwidth,
RL denotes the load resistor resistance,
ν denotes the optical frequency, and
R denotes the laser suppression ratio parameter.
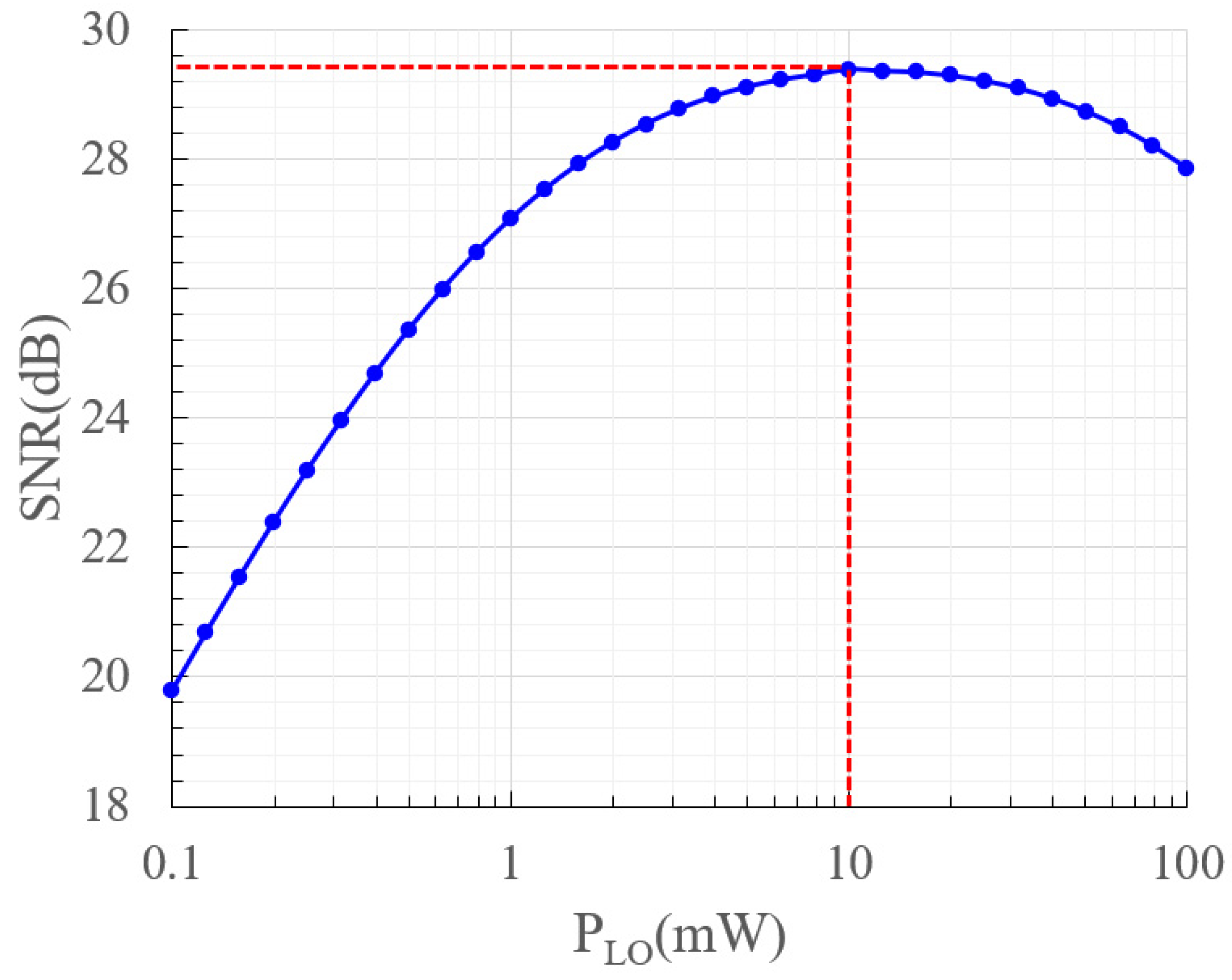
Combined with the beat frequency signal power expression in Equation (5), the SNR is obtained to have the following expression [
24].
Combined with the weak light detection background, when the signal laser beam power
PS is 20 nW, the signal-to-noise ratio
SNR with the local oscillation laser beam power
PLO variation graph is as shown in
Figure 2. When the
PLO is 10 mW, the
SNR attains its optimal value. In addition, the most suitable
PLO needs to be further selected in combination with the device’s performance to ensure optimal functionality within the actual system.
3. System and Simulation
The construction of the simulation system for the heterodyne coherent angle measurement was predicated on the analysis of the above principle (see
Figure 3 for a program block diagram). The initial angular deflections
αAZI and
αPIT were set along the azimuth and pitch directions, respectively, and converted to the phase
ψ1,
ψ2,
ψ3, and
ψ4 of the beat-frequency signals in each quadrant through the DWS process. The Monte Carlo method was adopted to simulate the spot presented by the laser beam in the QD photosensitive surface through random points, and the beat frequency signal was obtained based on the statistical points in each quadrant of the detector, which was used as the input signal of the Costas phase-locked loop simulation module.
The NCO generates in-phase (COS) and quadrature (SIN) signals from the initial frequency word and multiplies them with the NCO signal through the multiplier MULT. The output will contain the phase difference Δψ between the two signals. The result of the multiplication is then integrated and averaged in the integrator INT, and the interfering terms, such as the sum-of-frequencies component, are filtered out by using the periodicity of the sinusoidal signal. Subsequently, the in-phase and quadrature branch integration results are subjected to an atan operation to obtain the phase difference, denoted as Δψ, at the current moment. If the phase difference caused by the initial angle deviation exceeds 2π, it is necessary to first capture the beat frequency signal, eliminate the integer 2π parts of the phase difference, and then continue with phase tracking and detection. Concurrently, the loop filter LPF dynamically adjusts the frequency word of the NCO according to Δψ. Thereafter, the frequency fNCO of the NCO signal is continuously adjusted to ultimately realize phase tracking of the beat frequency signal.
Once the loop is locked, each quadrant outputs the phase values of ψ1′, ψ2′, ψ3′, and ψ4′ at the current moment, based on the NCO index. The phase difference ΔψAZI, ΔψPIT in the azimuth and pitch directions, respectively, are then calculated. The angular deflection, denoted as αAZI′ and αPIT′, is then obtained through the DWS phase-angle conversion process. This process enables the realization of the high-accuracy measurement and compensation of the initial angular deflection, αAZI and αPIT.
In the phase-locked loop, the loop filter dynamically adjusts the frequency of the NCO signal based on the leading and lagging characteristics of the phase of the NCO signal relative to the beat frequency signal. The NCO frequency is calculated based on the parameters of the current moment and the previous moment. The calculation process is as follows:
In this equation, fNCO and fNCOold represent the current and previous NCO signal frequencies, respectively, Δψ and Δψold represent the phase difference between the beat frequency signal and the NCO signal, T denotes the integration time, and τ1 and τ2 represent the filter coefficients.
The angular measurement accuracy is expressed as the fluctuation of the angle between the coherent beams recognized by the QD compared with the true result [
17] and is evaluated by the standard deviation of the difference between the true value of the angular deflection
αAZI and the measured value
α’
AZIi. The angular measurement accuracy has the following expression:
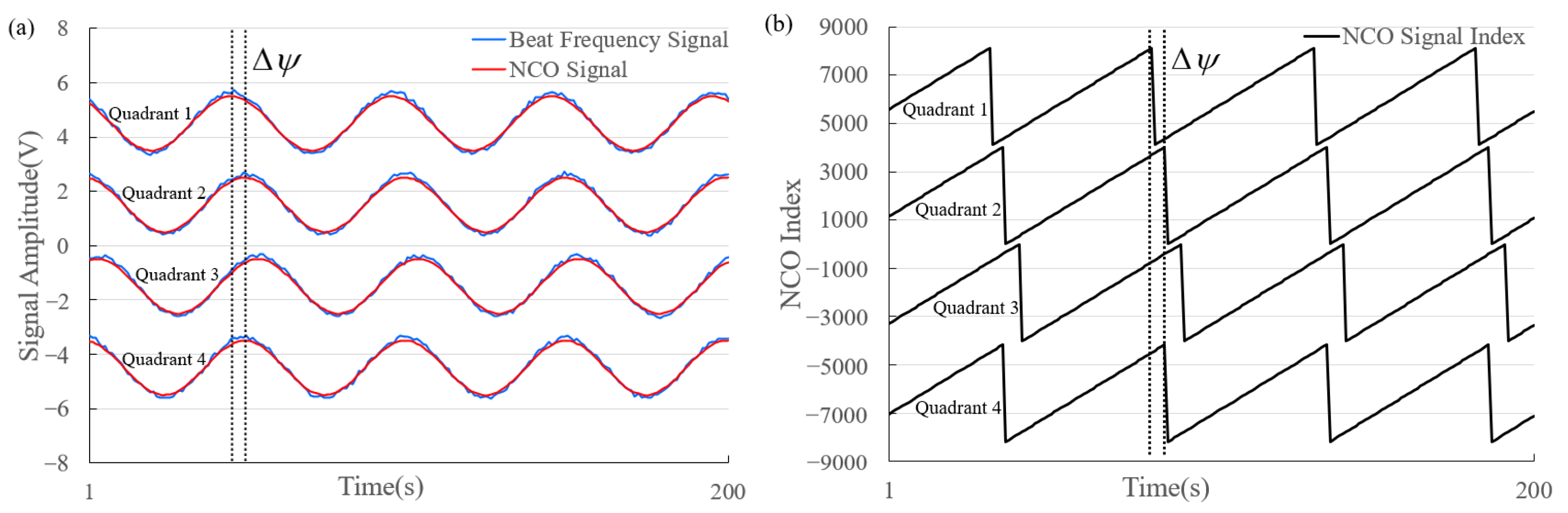
In the simulation system of the heterodyne coherent angle measurement, the following parameters were observed: the laser wavelength was 1550 nm, the beat signal frequency was 1 MHz, the QD photosensitive surface diameter was 3 mm, the spot diameter was 2 mm, the sampling frequency was 50 MHz, and the number of sampling bits was 12. To accentuate the phase difference between the quadrants, the initial angle deflection of the azimuth and pitch axes were set to 300 μrad, and the initial frequency of the phase-locked NCO output signal was also set to 1 MHz. The tracking results of the NCO signals in each quadrant on the phase of the beat frequency signal are shown in
Figure 4a. Following the establishment of a locked loop, the current phase information was characterized according to the index of the NCO output signal in each quadrant concurrently. The ensuing results are illustrated in
Figure 4b. To facilitate the visualization of the phase differences in the signals within each quadrant, a certain amount of direct flow was superimposed on the signals during the plotting process, which allowed for differentiation of the signals.
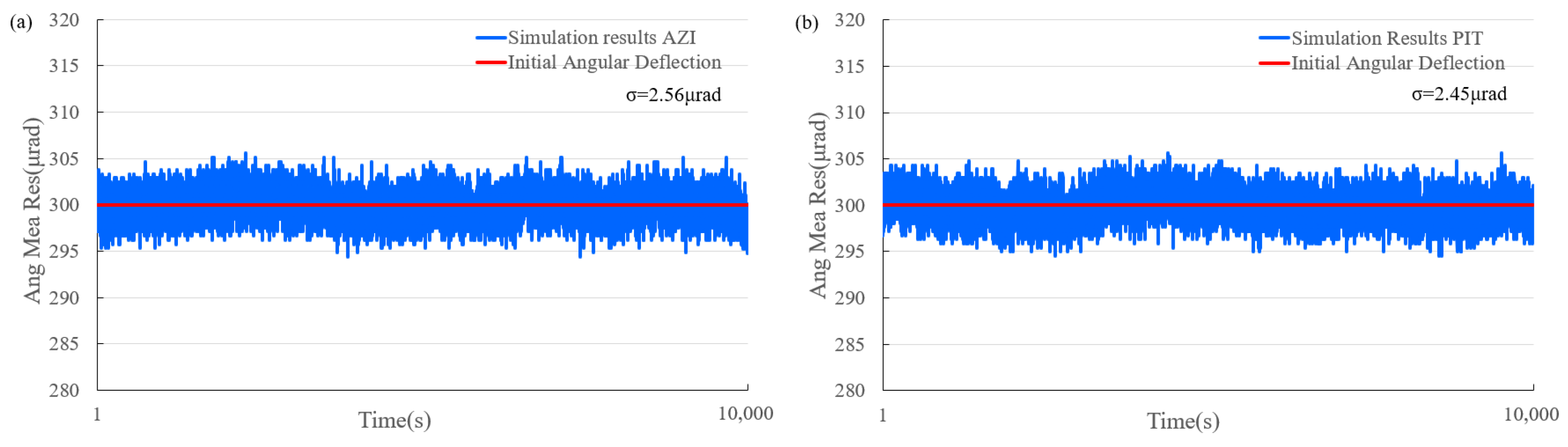
The initial angular deflections of the azimuth and pitch axes were calculated and measured based on the NCO output signal index of each quadrant. The angle measuring results are shown in
Figure 5.
The experimental results indicate that the accuracy of the heterodyne coherent angle measurements in the azimuth and pitch directions was 2.56 μrad and 2.45 μrad, respectively. This suggests that the simulation system functioned properly in each module and was capable of measuring the given angular deflection with high accuracy.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}