Modeling and Configuration Optimization of Spatial Angle Diversity Reception for Underwater Multi-Faceted Optical Base Station

Abstract
1. Introduction
2. Main Assumptions and Channel Model
2.1. Signal Transmission
2.2. Channel Model
3. Optical Base Station Diversity Reception
3.1. Detector Output and Data Detection
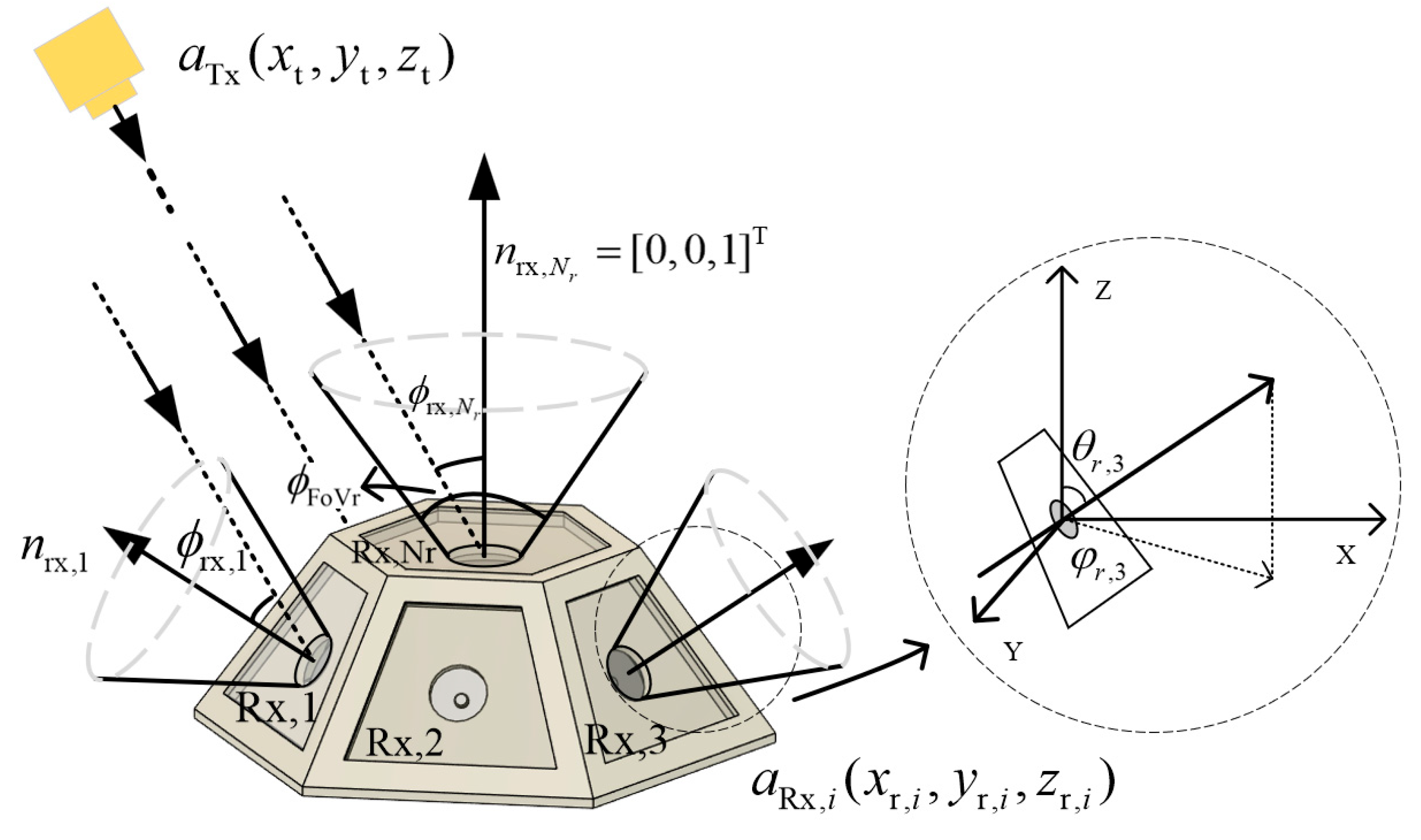
3.2. Multi-Faceted OBS Angle Diversity Receiver
4. Numerical Results and Discussions
4.1. Multi-Faceted OBS Modeling
4.2. Multi-Faceted OBS Receiving Configuration Parameter Optimization
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- González-García, J.; Gómez-Espinosa, A.; Cuan-Urquizo, E.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Escobedo Cabello, J.A. Autonomous underwater vehicles: Localization, navigation, and communication for collaborative missions. Appl. Sci. 2020, 10, 1256. [Google Scholar] [CrossRef]
- Schill, F.; Bahr, A.; Martinoli, A. Vertex: A new distributed underwater robotic platform for environmental monitoring. In Distributed Autonomous Robotic Systems: The 13th International Symposium; Springer: Cham, Switzerland, 2018; pp. 679–693. [Google Scholar] [CrossRef]
- Hoeher, P.A.; Sticklus, J.; Harlakin, A. Underwater optical wireless communications in swarm robotics: A tutorial. IEEE Commun. Surv. Tutor. 2021, 23, 2630–2659. [Google Scholar] [CrossRef]
- Connor, J.; Champion, B.; Joordens, M.A. Current algorithms, communication methods and designs for underwater swarm robotics: A review. IEEE Sens. J. 2020, 21, 153–169. [Google Scholar] [CrossRef]
- Kaushal, H.; Kaddoum, G. Underwater optical wireless communication. IEEE Access 2016, 4, 1518–1547. [Google Scholar] [CrossRef]
- Saeed, N.; Celik, A.; Al-Naffouri, T.Y.; Alouini, M.-S. Underwater optical wireless communications, networking, and localization: A survey. Ad Hoc Netw. 2019, 94, 101935. [Google Scholar] [CrossRef]
- Sabril, S.; Jasman, F.; Hassan, W.H.W.; Mutalip, Z.A.; Mohd-Mokhtar, R.; Hassan, Z. The Effect of Medium Inhomogeneity in Modeling Underwater Optical Wireless Communication. J. Commun. 2021, 16, 386–393. [Google Scholar] [CrossRef]
- Lv, Z.; He, G.; Qiu, C.; Liu, Z. Investigation of underwater wireless optical communications links with surface currents and tides for oceanic signal transmission. IEEE Photonics J. 2021, 13, 1–8. [Google Scholar] [CrossRef]
- Nasser, A.G.; Ali, M.A.A. Performance of LED for line-of-sight (LoS) underwater wireless optical communication system. J. Opt. Commun. 2024, 44, s1355–s1363. [Google Scholar] [CrossRef]
- Jasman, F.; Green, R.J.; Leeson, M.S. Impact of receiver field of view on underwater optical wireless communications. Microw. Opt. Technol. Lett. 2017, 59, 837–840. [Google Scholar] [CrossRef]
- Doniec, M.; Angermann, M.; Rus, D. An end-to-end signal strength model for underwater optical communications. IEEE J. Ocean. Eng. 2013, 38, 743–757. [Google Scholar] [CrossRef]
- Li, J.; Yang, B.; Ye, D.; Wang, L.; Fu, K.; Piao, J.; Wang, Y. A real-time, full-duplex system for underwater wireless optical communication: Hardware structure and optical link model. IEEE Access 2020, 8, 109372–109387. [Google Scholar] [CrossRef]
- Baiden, G.; Bissiri, Y.; Masoti, A. Paving the way for a future underwater omni-directional wireless optical communication systems. Ocean Eng. 2009, 36, 633–640. [Google Scholar] [CrossRef]
- Barroso, A.R.F.; Baiden, G.; Johnson, J. Teleoperation of mining equipment using optical wireless communications. In Proceedings of the 2015 Seventh International Conference on Ubiquitous and Future Networks, Sapporo, Japan, 7–10 July 2015; pp. 727–733. [Google Scholar] [CrossRef]
- Shi, J.; Ma, C.; Tian, X.; Guo, H.; Ao, J. Optimization and Modeling of Optical Emission Spatial Coverage from Underwater Multi-Faceted Optical Base Stations. Photonics 2024, 12, 4. [Google Scholar] [CrossRef]
- Kong, M.; Guo, Y.; Sait, M.; Alkhazragi, O.; Kang, C.H.; Ng, T.K.; Ooi, B.S. Toward automatic subsea operations using real-time underwater optical wireless sensor networks. IEEE Photonics J. 2021, 14, 1–8. [Google Scholar] [CrossRef]
- Zhang, H.; Gao, Y.; Tong, Z.; Yang, X.; Zhang, Y.; Zhang, C.; Xu, J. Omnidirectional optical communication system designed for underwater swarm robotics. Opt. Express 2023, 31, 18630–18644. [Google Scholar] [CrossRef]
- Burton, A.; Ghassemlooy, Z.; Rajbhandari, S.; Liaw, S.K. Design and analysis of an angular-segmented full-mobility visible light communications receiver. Trans. Emerg. Telecommun. Technol. 2014, 25, 591–599. [Google Scholar] [CrossRef]
- Chen, C.; Zhong, W.-D.; Yang, H.; Zhang, S.; Du, P. Reduction of SINR fluctuation in indoor multi-cell VLC systems using optimized angle diversity receiver. J. Light. Technol. 2018, 36, 3603–3610. [Google Scholar] [CrossRef]
- Chi, S.; Wang, P.; Niu, S.; Che, H.; Wang, Z.; Wu, Y. Uniformity improvement on received optical power for an indoor visible light communication system with an angle diversity receiver. Appl. Opt. 2021, 60, 8031–8037. [Google Scholar] [CrossRef]
- Jamali, M.V.; Mirani, A.; Parsay, A.; Abolhassani, B.; Nabavi, P.; Chizari, A.; Khorramshahi, P.; Abdollahramezani, S.; Salehi, J.A. Statistical studies of fading in underwater wireless optical channels in the presence of air bubble, temperature, and salinity random variations. IEEE Trans. Commun. 2018, 66, 4706–4723. [Google Scholar] [CrossRef]
- Ata, Y.; Kiasaleh, K. Analysis of optical wireless communication links in turbulent underwater channels with wide range of water parameters. IEEE Trans. Veh. Technol. 2023, 72, 6363–6374. [Google Scholar] [CrossRef]
- Hamza, T.; Khalighi, M.-A.; Bourennane, S.; Léon, P.; Opderbecke, J. Investigation of solar noise impact on the performance of underwater wireless optical communication links. Opt. Express 2016, 24, 25832–25845. [Google Scholar] [CrossRef] [PubMed]
- Khalil, R.A.; Babar, M.I.; Saeed, N.; Jan, T.; Cho, H.-S. Effect of link misalignment in the optical-internet of underwater things. Electronics 2020, 9, 646. [Google Scholar] [CrossRef]
- Ju, M.; Shi, H.; Li, Y.; Huang, P.; Tan, G. Effect of the APD Receiver’s Tilted Angle on Channel Capacity for Underwater Wireless Optical Communications. Electronics 2021, 10, 2246. [Google Scholar] [CrossRef]
- Ijeh, I.C.; Khalighi, M.A.; Elamassie, M.; Hranilovic, S.; Uysal, M. Outage probability analysis of a vertical underwater wireless optical link subject to oceanic turbulence and pointing errors. J. Opt. Commun. Netw. 2022, 14, 439–453. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Sadough, S.M.S.; Khalighi, M.A. FSO channel estimation for OOK modulation with APD receiver over atmospheric turbulence and pointing errors. Opt. Commun. 2017, 402, 577–584. [Google Scholar] [CrossRef]
- Luo, H.; Wang, X.; Bu, F.; Yang, Y.; Ruby, R.; Wu, K. Underwater real-time video transmission via wireless optical channels with swarms of AUVs. IEEE Trans. Veh. Technol. 2023, 72, 14688–14703. [Google Scholar] [CrossRef]
- Zaye, M.M.; Shokair, M.; Elagooz, S.; Elshenawy, H. Feasibility analysis of line of sight (LOS) underwater wireless optical communications (UWOCs) via link budget. Opt. Quantum Electron. 2024, 56, 1012. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value |
|---|---|---|
| Total power of LEDs | 11 W | |
| Transmission half-angle | 15° | |
| Attenuation coefficient of clear seawater | 0.151 m−1 | |
| The effective detection area of the detector | 0.0001 m2 | |
| Filter transmittance | 0.90 | |
| Filter bandwidth | 20 nm | |
| Refractive index of the concentrator | 1.5 | |
| Scintillation coefficient | 0.1 | |
| APD responsivity | 10 A/W | |
| The spectral irradiance of sea level | 0.7645 Wm2 nm−1 | |
| Underwater depth of the receiver | 100 m | |
| Load resistance of the TIA | 50 | |
| Electron charge | e | 1.6 × 10−19 C |
| Internal amplification gain of the APD | 50 | |
| Boltzmann constant | 1.380649 × 10−23 J/K | |
| Equivalent temperature | 300 K | |
| LPF bandwidth | 10,000,000 | |
| Ionization ratio | 0.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, J.; Ao, J.; Ma, C.; Tian, X.; Guo, H. Modeling and Configuration Optimization of Spatial Angle Diversity Reception for Underwater Multi-Faceted Optical Base Station. Photonics 2025, 12, 382. https://doi.org/10.3390/photonics12040382
Shi J, Ao J, Ma C, Tian X, Guo H. Modeling and Configuration Optimization of Spatial Angle Diversity Reception for Underwater Multi-Faceted Optical Base Station. Photonics. 2025; 12(4):382. https://doi.org/10.3390/photonics12040382
Chicago/Turabian StyleShi, Junjie, Jun Ao, Chunbo Ma, Xu Tian, and Hanjun Guo. 2025. "Modeling and Configuration Optimization of Spatial Angle Diversity Reception for Underwater Multi-Faceted Optical Base Station" Photonics 12, no. 4: 382. https://doi.org/10.3390/photonics12040382
APA StyleShi, J., Ao, J., Ma, C., Tian, X., & Guo, H. (2025). Modeling and Configuration Optimization of Spatial Angle Diversity Reception for Underwater Multi-Faceted Optical Base Station. Photonics, 12(4), 382. https://doi.org/10.3390/photonics12040382