Angular Circle Array Multiple Input Multiple Output Underwater Optical Wireless Communications †



Abstract
:1. Introduction
2. System Model
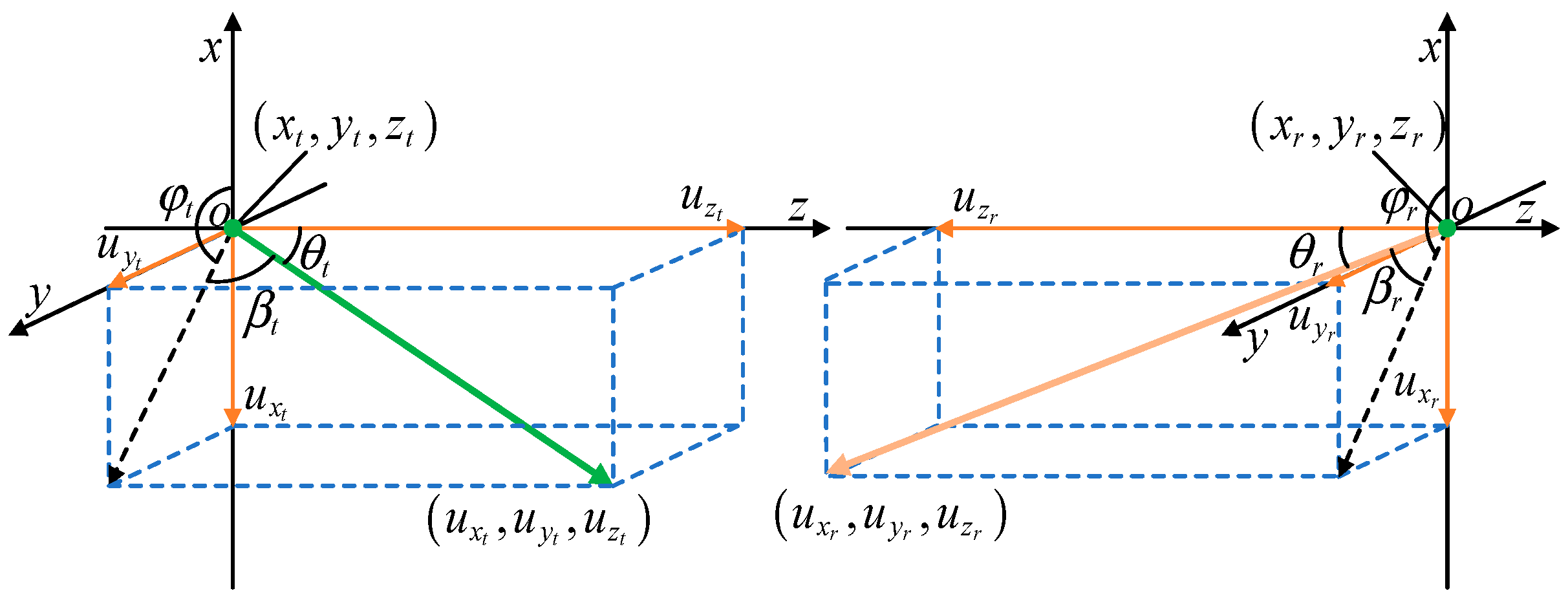
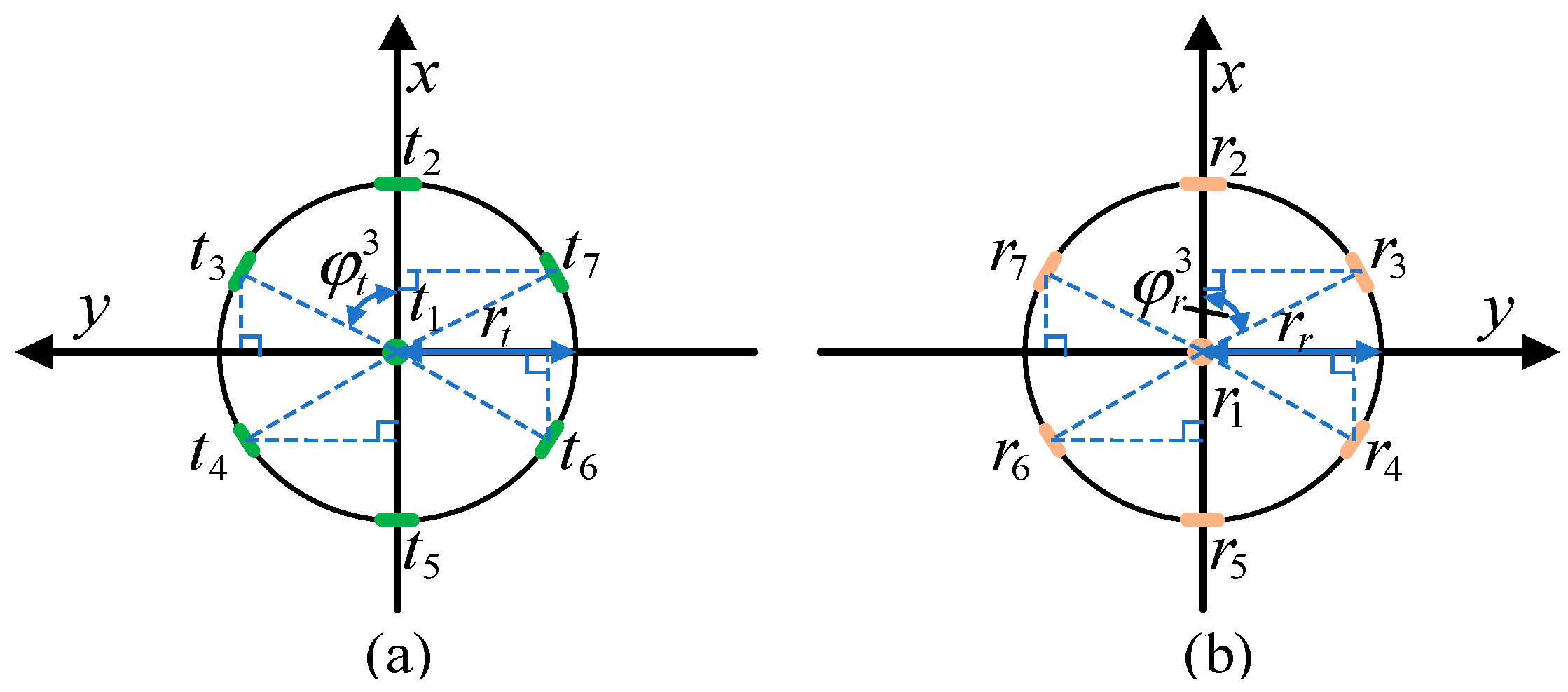
2.1. Definition of Transceiver Parameters
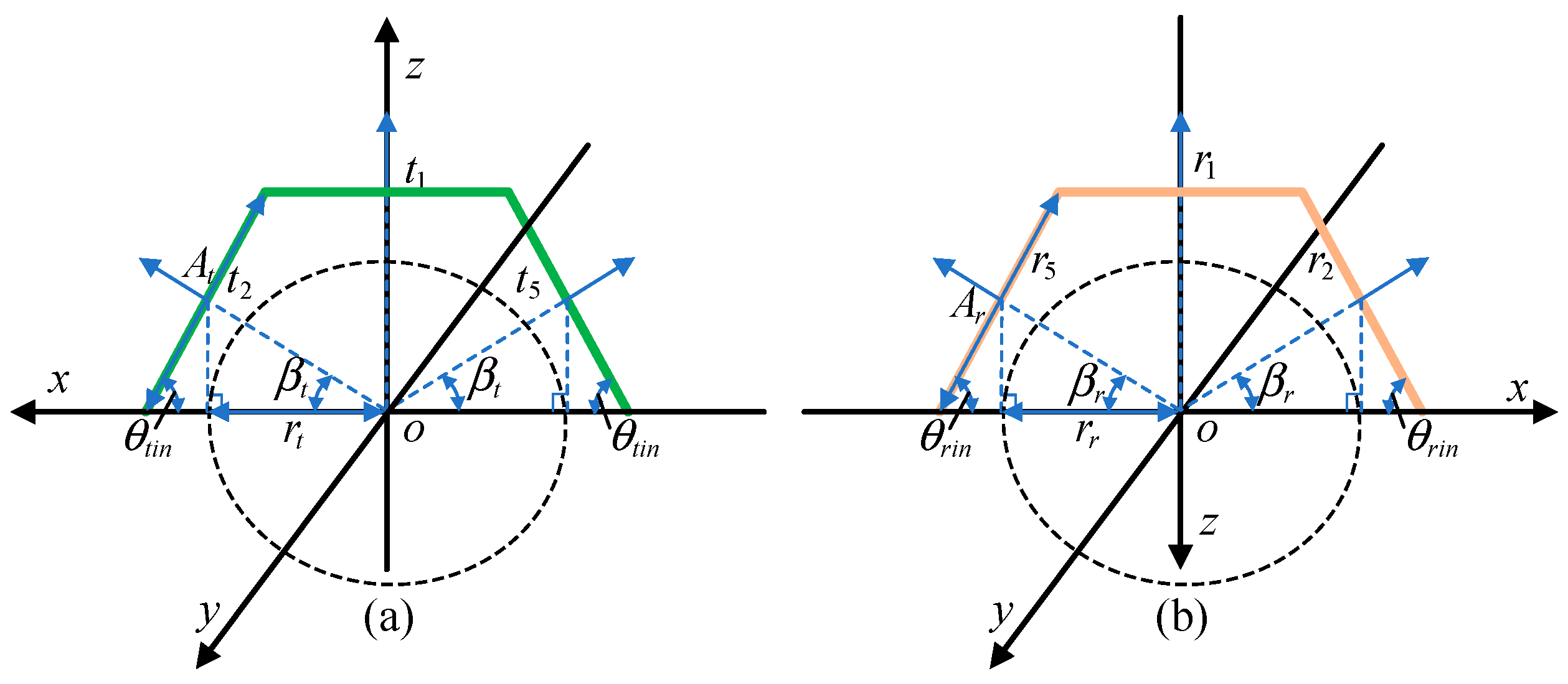
2.2. Transmitter Rotation
2.3. Receiver Rotation
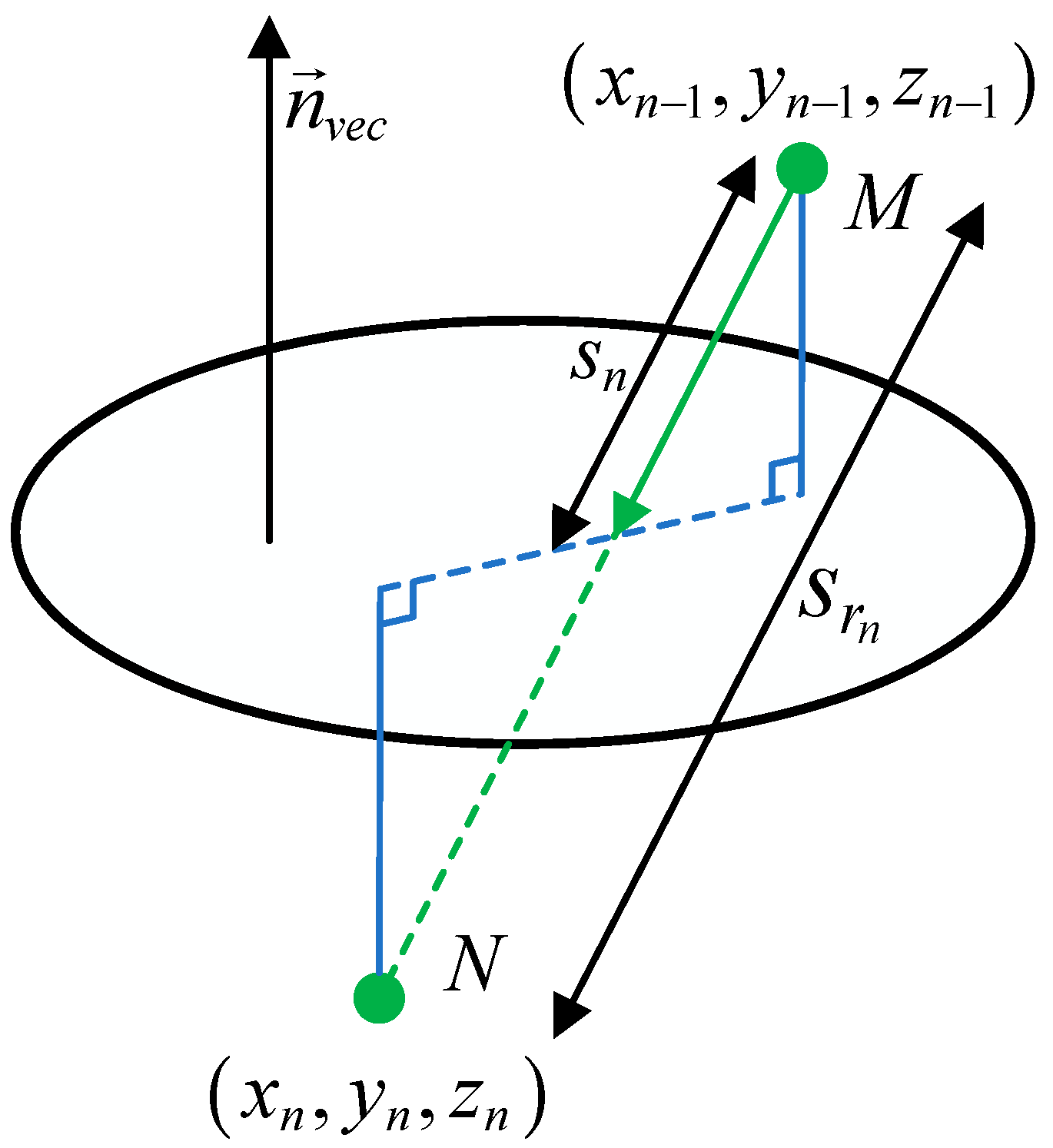
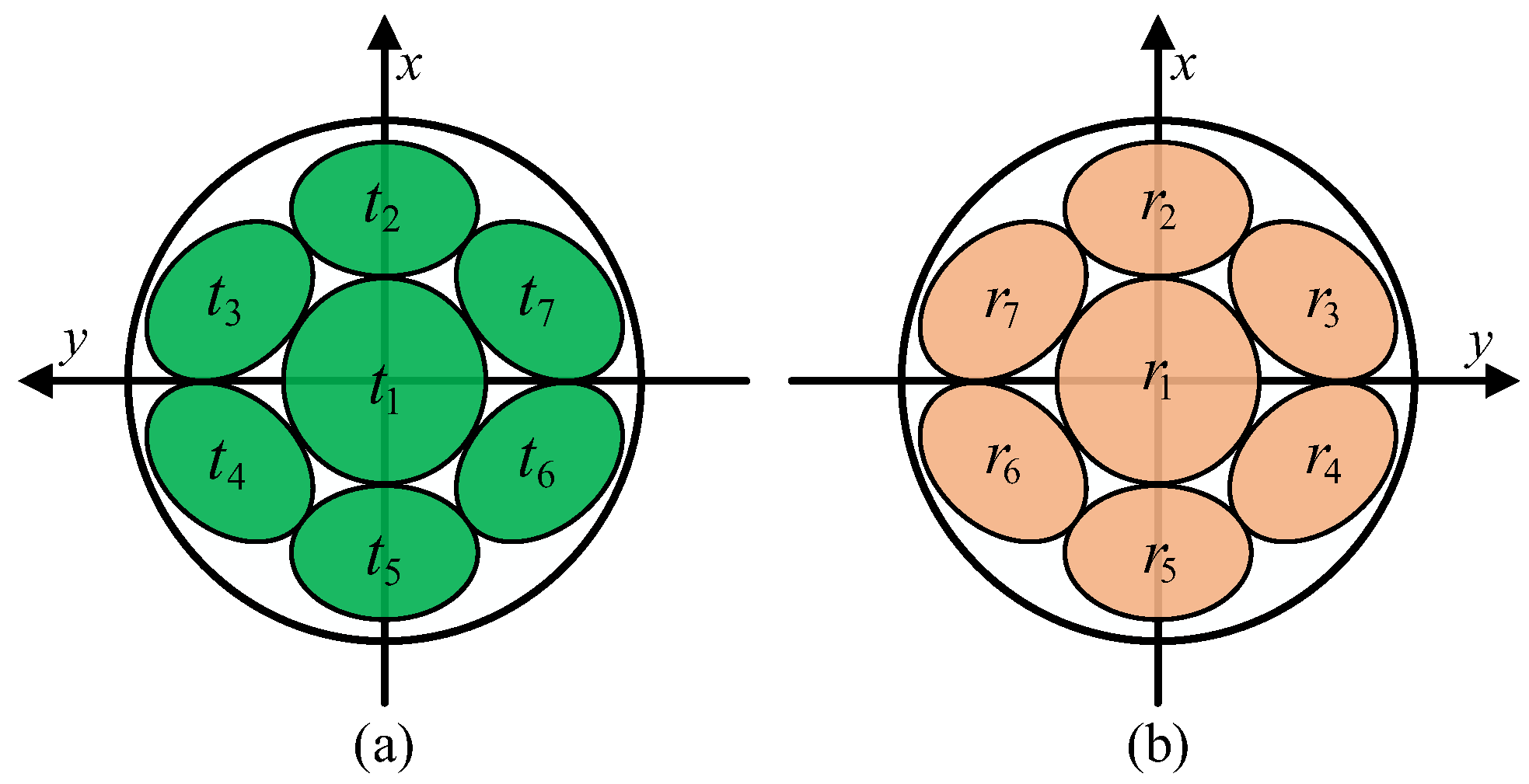
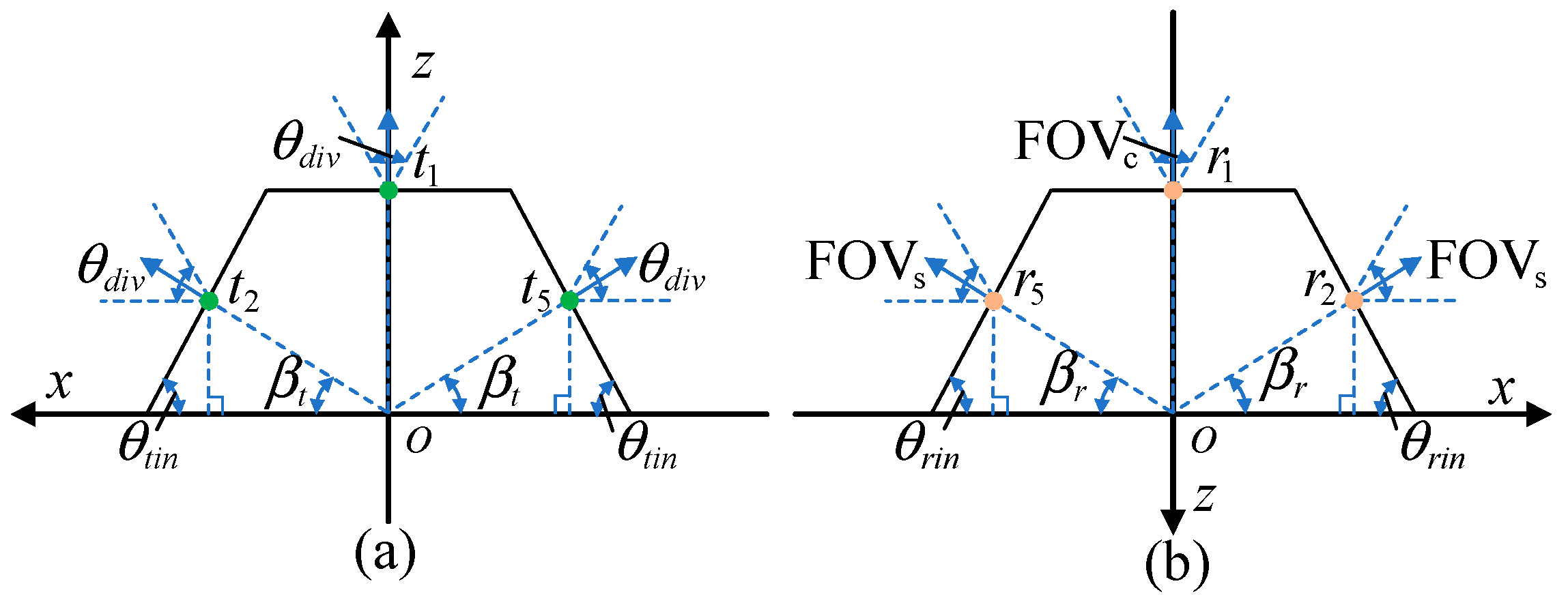
2.4. Derivation of the Transceiver Structure
3. Channel Capacity of Underwater Wireless Optical MIMO Communication System
4. Analysis and Discussion of Data Results
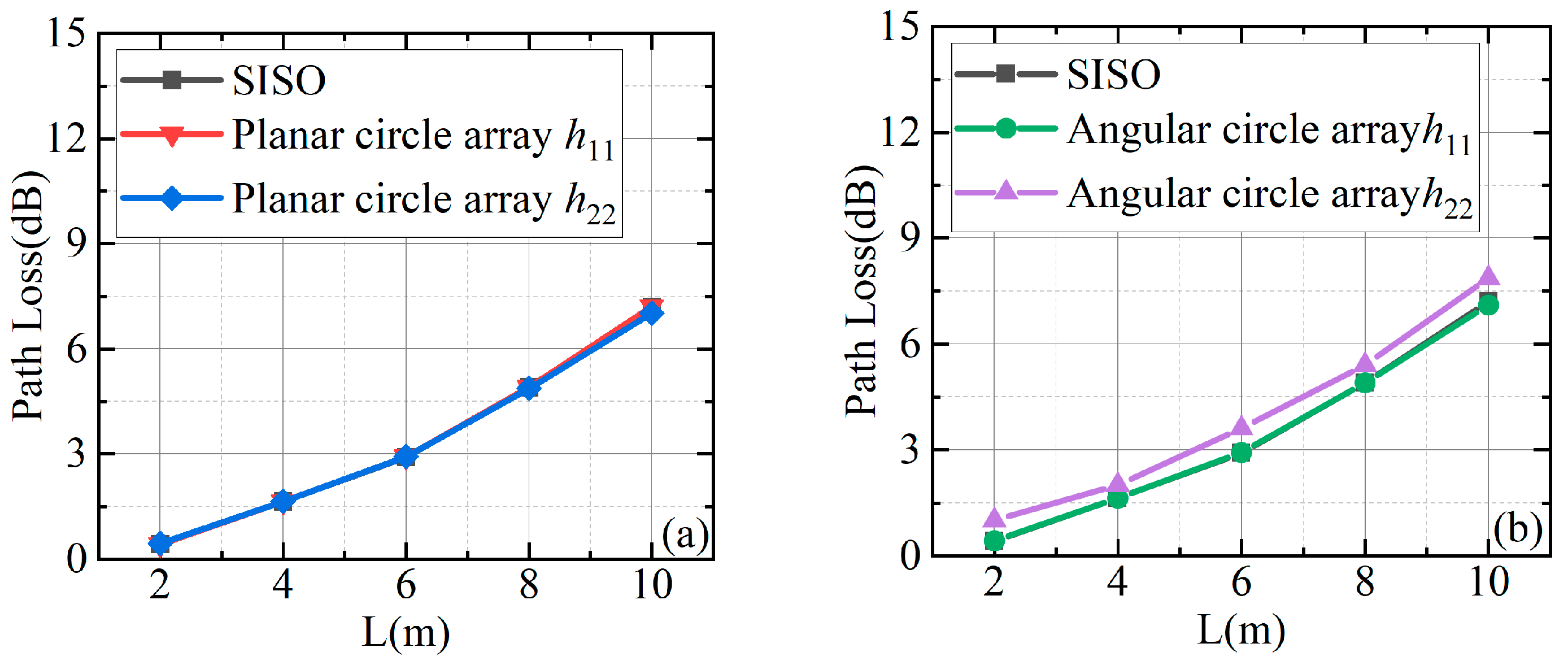
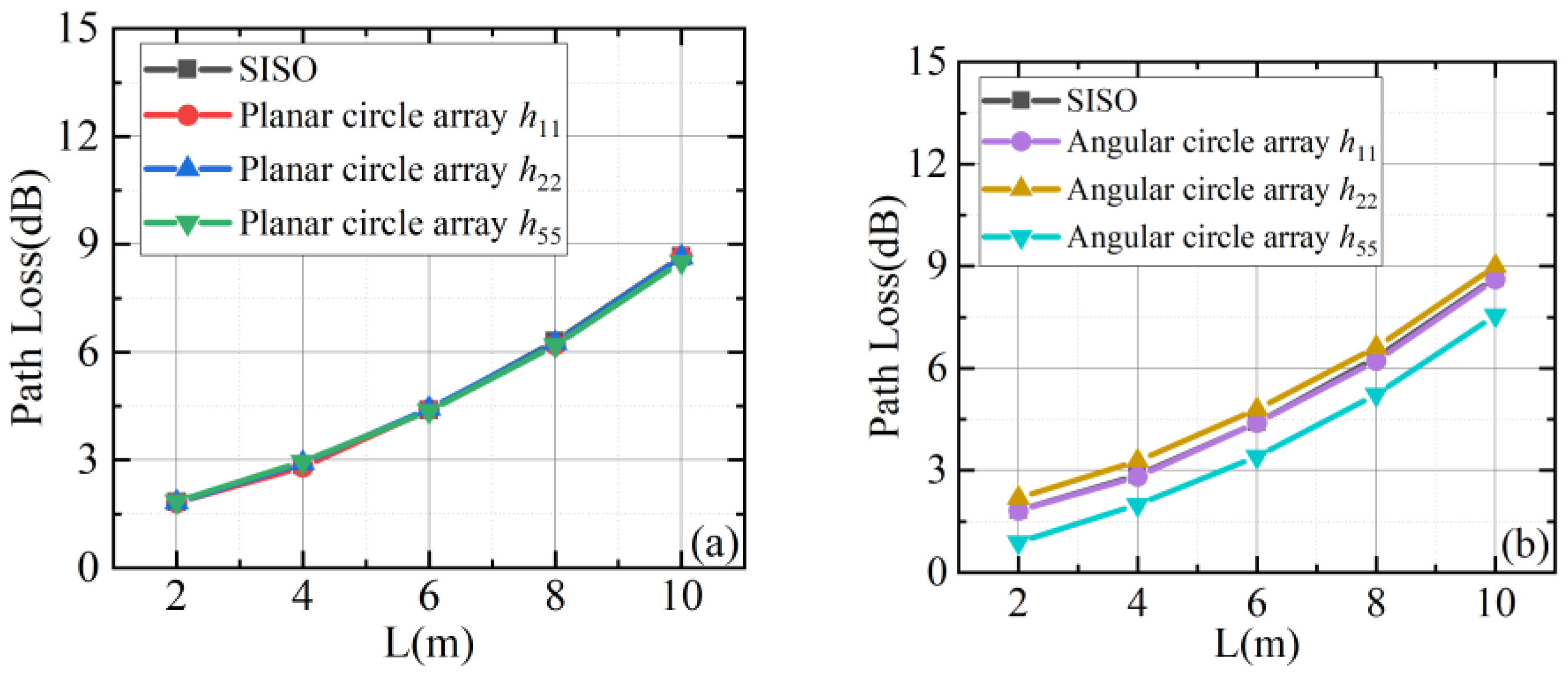
4.1. Path Loss
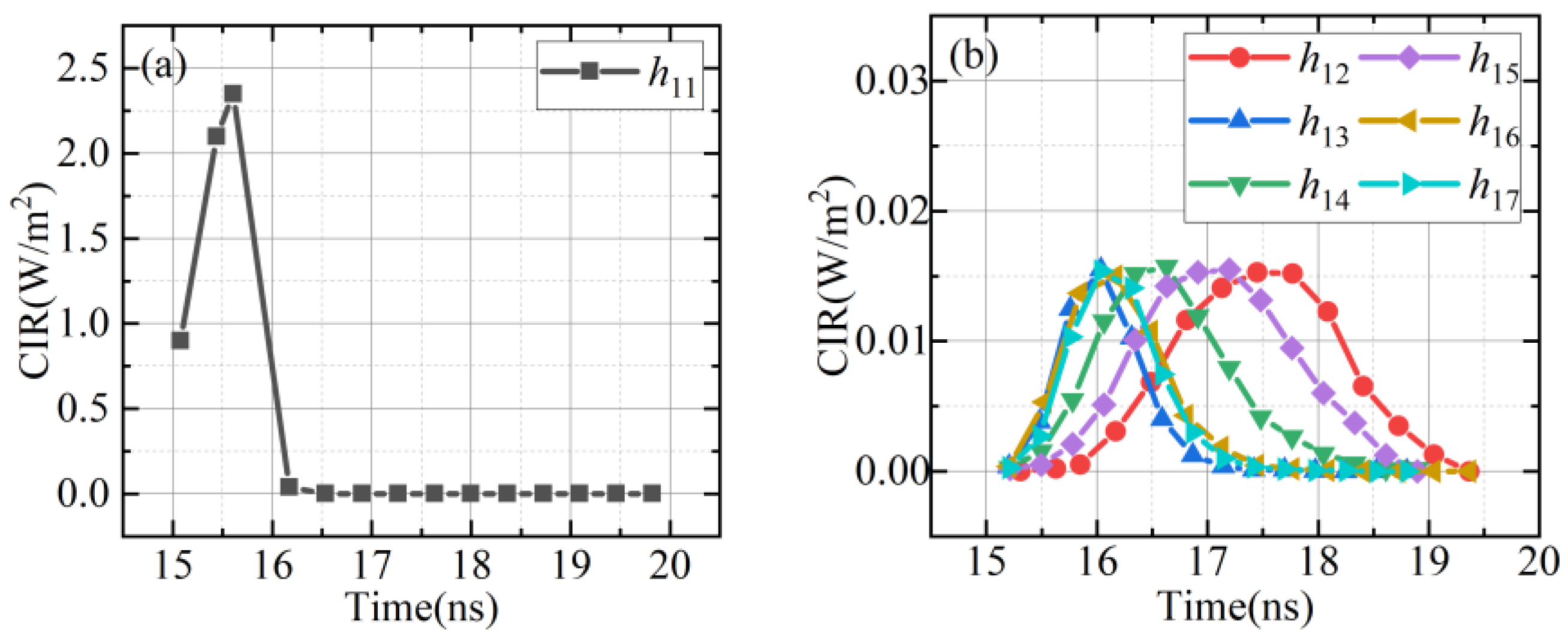
4.2. Channel Impulse Response
4.3. Function Fitting
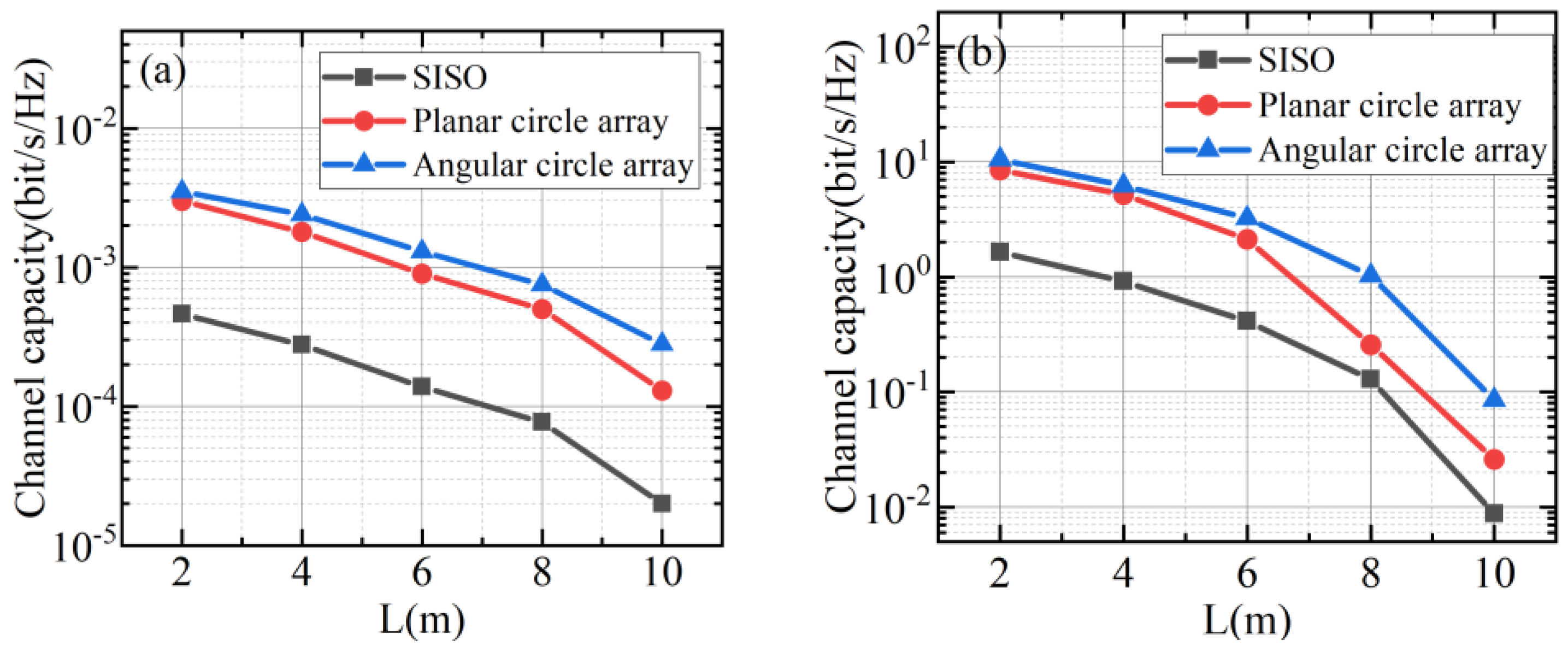
4.4. Channel Capacity
4.5. Outage Probability
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qu, F.; Wang, Z.; Yang, L.; Wu, Z. A journey toward modeling and resolving doppler in underwater acoustic communications. IEEE Commun. Mag. 2016, 54, 49–55. [Google Scholar] [CrossRef]
- Fornari, D.J.; Bradley, A.; Humphris, S.E.; Walden, B.; Deuster, A. Inductively coupled link (ICL) temperature probes for hot hydrothermal fluid sampling from ROV Jason and DSV Alvin. Ridge Events 1997, 8, 26–30. [Google Scholar]
- Palmeiro, A.; Martín, M.; Crowther, L.; Rhodes, M. Underwater radio frequency communications. In Proceedings of the OCEANS 2011 IEEE-Spain, Santander, Spain, 6–9 June 2011. [Google Scholar]
- Chowdhury, M.Z.; Hossan, M.T.; Islam, A.; Jang, Y.M. A comparative survey of optical wireless technologies: Architectures and applications. IEEE Access 2018, 6, 9819–9840. [Google Scholar] [CrossRef]
- Hanson, F.; Radic, S. High bandwidth underwater optical communication. Appl. Opt. 2008, 47, 277–283. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Lu, C.; Li, S.; Xu, Z. 100 m/500 Mbps underwater optical wireless communication using an NRZ-OOK modulated 520 nm laser diode. Opt. Express 2019, 27, 12171–12181. [Google Scholar] [CrossRef] [PubMed]
- Hu, F.; Li, G.; Zou, P.; Hu, J.; Chen, S.; Liu, Q. 20.09-Gbit/s Underwater WDM-VLC transmission based on a single Si/GaAs-substrate multichromatic LED array chip. In Proceedings of the 2020 Optical Fiber Communications Conference and Exhibition (OFC), San Diego, CA, USA, 8–12 March 2020. [Google Scholar]
- Fei, C.; Wang, Y.; Du, J.; Chen, R.; Lv, N.; Zhang, G.; Tian, J.; Hong, X.; He, S. 100-m/3-Gbps underwater wireless optical transmission using a wideband photomultiplier tube (PMT). Opt. Express 2022, 30, 2326–2337. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Liu, Y.; Yi, X.; Zhao, R. Design and Simulation of Underwater Wireless Optical Angular Circle Array MIMO Communication Systems. In Proceedings of the 2024 IEEE 10th International Conference on Underwater System Technology: Theory and Applications, Xi’an, China, 18–20 October 2024. [Google Scholar]
- Zeng, Z.; Fu, S.; Zhang, H.; Dong, Y.; Cheng, J. A survey of underwater optical wireless communications. IEEE Commun. Surv. Tutor. 2017, 19, 204–238. [Google Scholar] [CrossRef]
- Ramavath, P.N.; Udupi, S.A.; Krishnan, P. High-speed and reliable underwater wireless optical communication system using multiple-input multiple-output and channel coding techniques for IoUT applications. Opt. Commun. 2020, 461, 125229–125235. [Google Scholar] [CrossRef]
- Ata, Y.; Baykal, Y.; Gökçe, M.C. Analysis of optical wireless MIMO communication in underwater medium. IEEE Internet Things J. 2024, 11, 20660–20672. [Google Scholar] [CrossRef]
- Dong, Y.; Liu, J.; Zhang, H. On capacity of 2-by-2 underwater wireless optical MIMO channels. In Proceedings of the 2015 Advances in Wireless and Optical Communications (RTUWO), Riga, Latvia, 5–6 November 2015. [Google Scholar]
- Jamali, M.V.; Salehi, J.A.; Akhoundi, F. Performance studies of underwater wireless optical communication systems with spatial diversity: MIMO scheme. IEEE Trans. Commun. 2017, 65, 1176–1192. [Google Scholar] [CrossRef]
- Cox, W.C., Jr. Simulation, Modeling, and Design of Underwater Optical Communication Systems; North Carolina State University: Raleigh, NC, USA, 2012. [Google Scholar]
- Ying, L.Z.; Ying, M.W.; Ai, P.H. Analysis of Underwater Laser Transmission Characteristics Under Monte Carlo Simulation. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018. [Google Scholar]
- Yi, X.; Liu, J.; Liu, Y.; Ata, Y. Monte-Carlo based vertical underwater optical communication performance analysis with chlorophyll depth profiles. Opt. Express 2023, 31, 41684–41700. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value/Unit |
|---|---|
| (0,0,0) | |
| 50 mw | |
| 20° | |
| 0.001 m | |
| 514 nm | |
| 0.15 m | |
| FOV | 60° |
| 0.15 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Liu, Y.; Yi, X.; Zhao, R. Angular Circle Array Multiple Input Multiple Output Underwater Optical Wireless Communications. Photonics 2025, 12, 12. https://doi.org/10.3390/photonics12010012
Chen Z, Liu Y, Yi X, Zhao R. Angular Circle Array Multiple Input Multiple Output Underwater Optical Wireless Communications. Photonics. 2025; 12(1):12. https://doi.org/10.3390/photonics12010012
Chicago/Turabian StyleChen, Zhuoqi, Yuhe Liu, Xiang Yi, and Ruiqin Zhao. 2025. "Angular Circle Array Multiple Input Multiple Output Underwater Optical Wireless Communications" Photonics 12, no. 1: 12. https://doi.org/10.3390/photonics12010012
APA StyleChen, Z., Liu, Y., Yi, X., & Zhao, R. (2025). Angular Circle Array Multiple Input Multiple Output Underwater Optical Wireless Communications. Photonics, 12(1), 12. https://doi.org/10.3390/photonics12010012