Improved Accuracy of the 3D Measurement Method Utilizing Differential Modulation Based on Multi-Color Channel Fusion

Abstract
1. Introduction
2. Method Principle
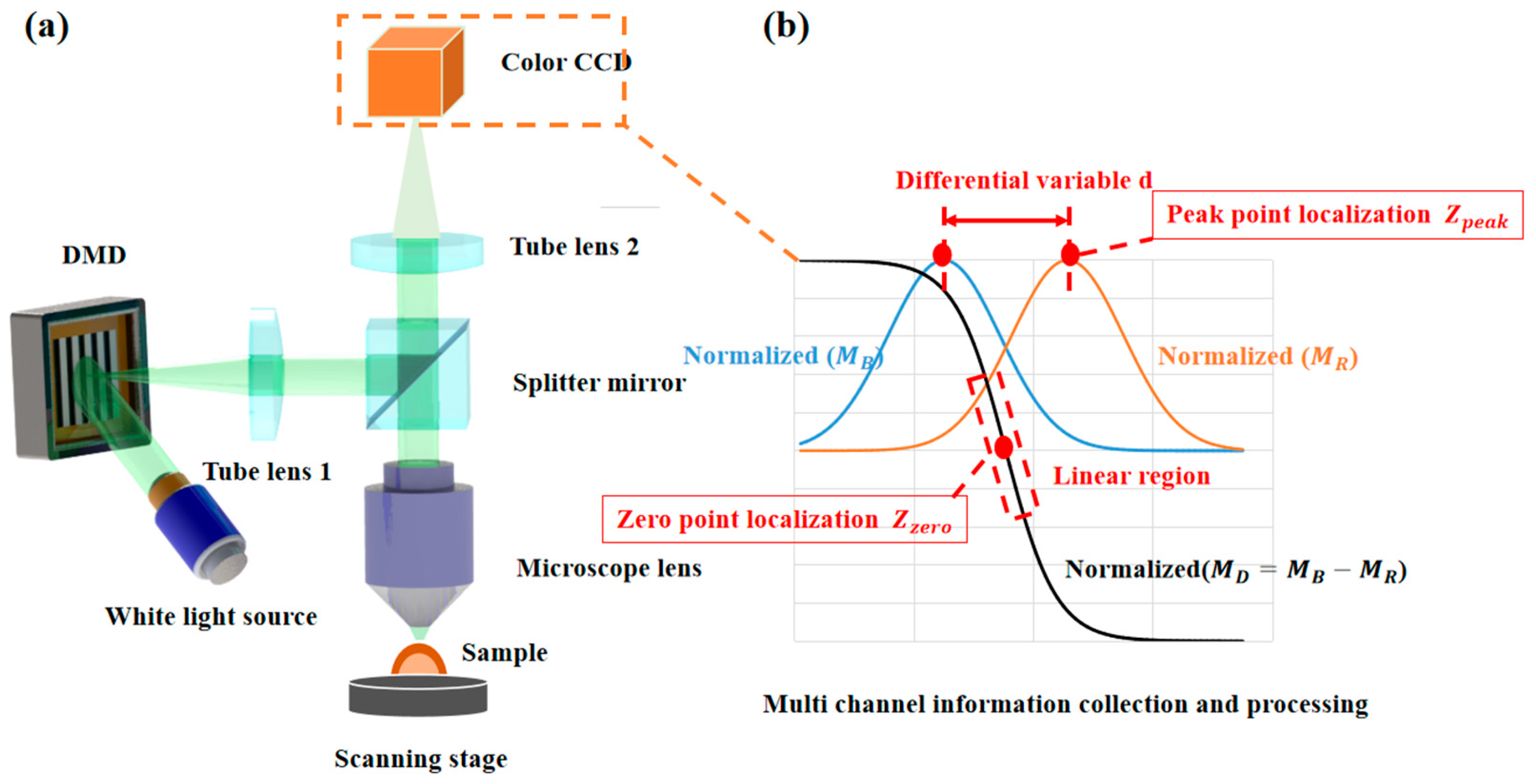
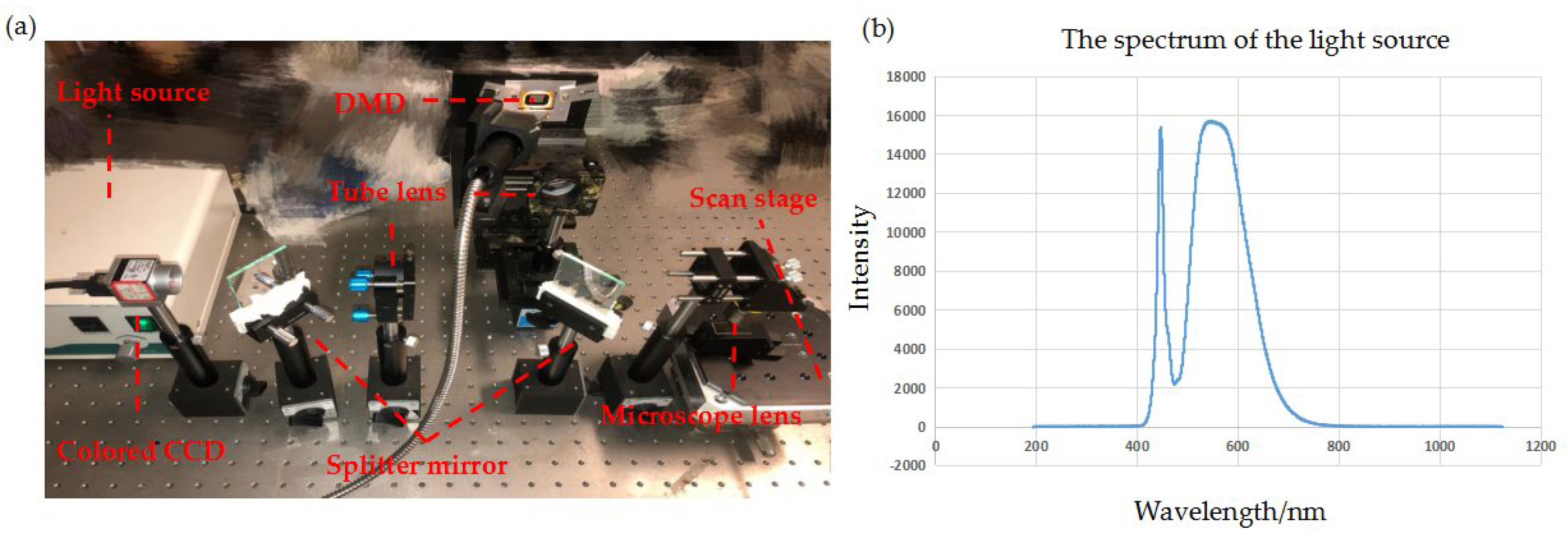
2.1. Measurement System
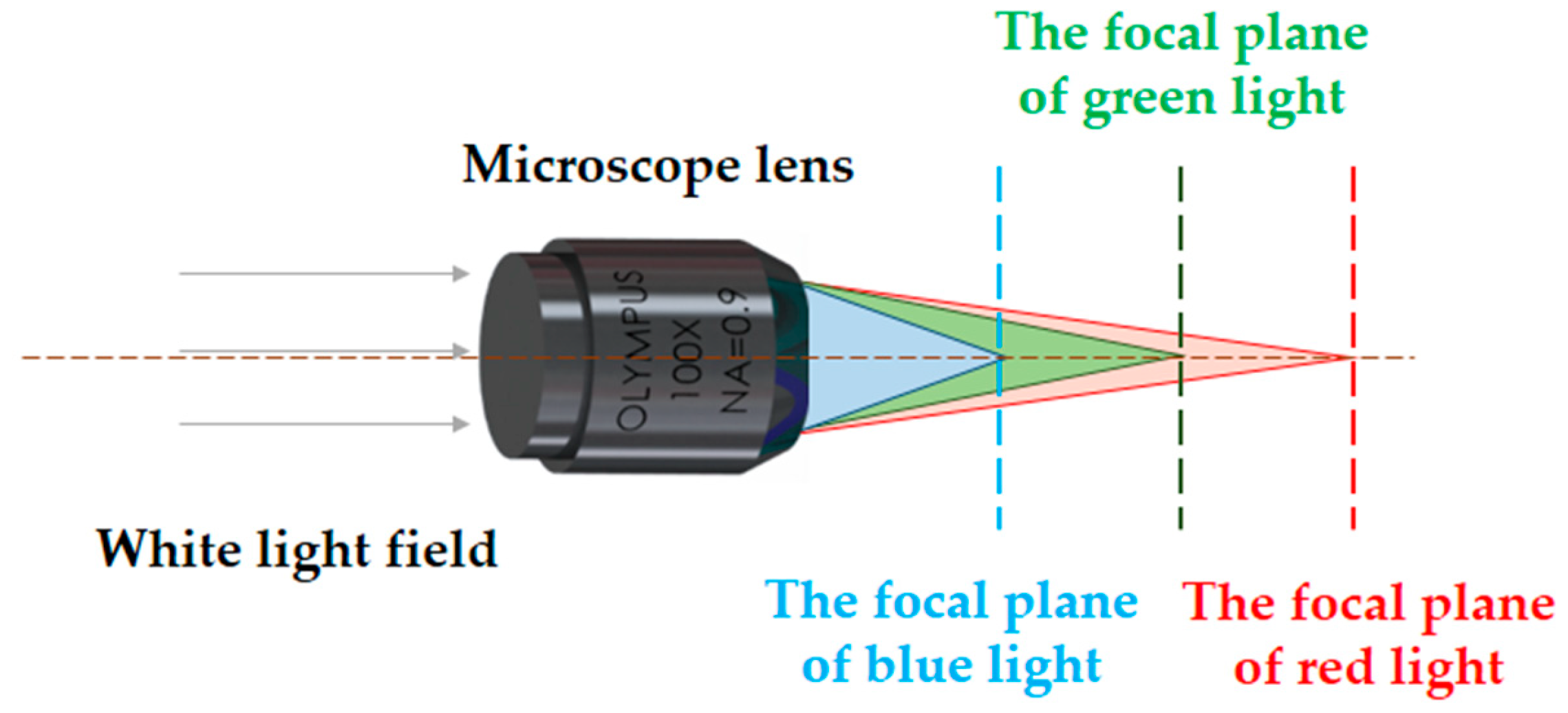
2.2. Theoretical Analysis
3. Simulation and Experiment
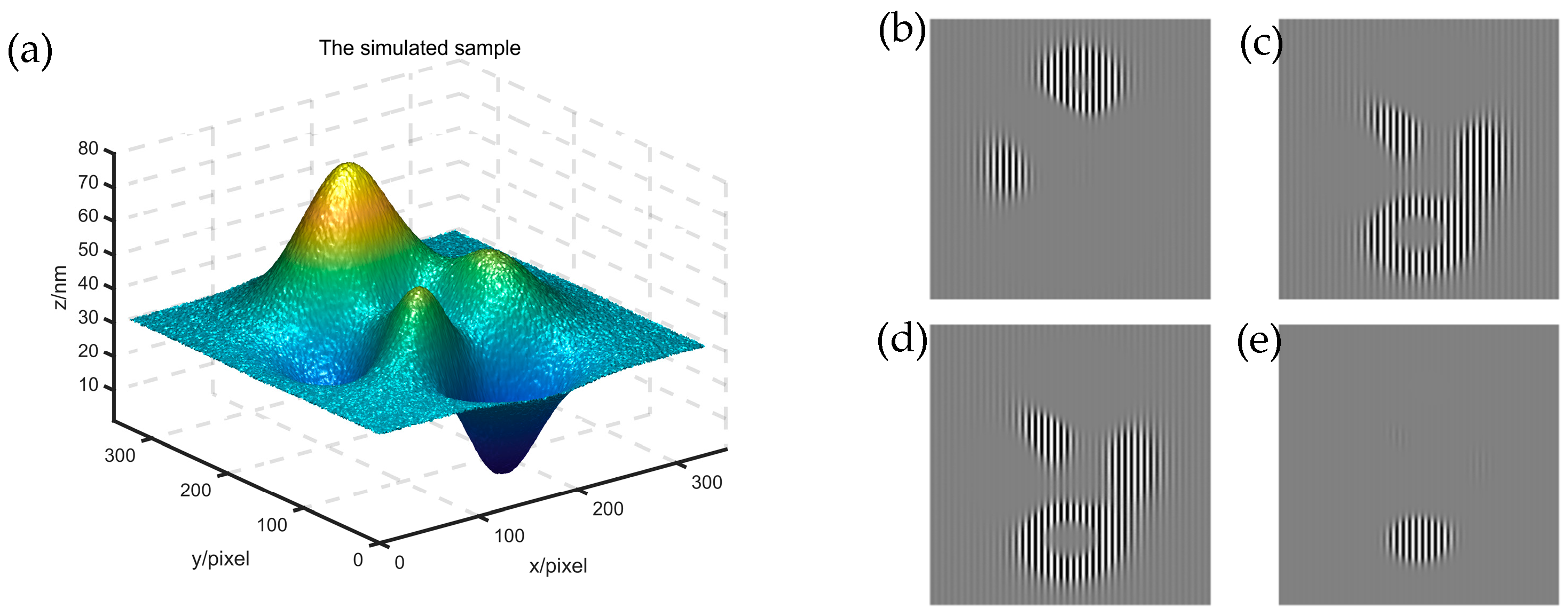
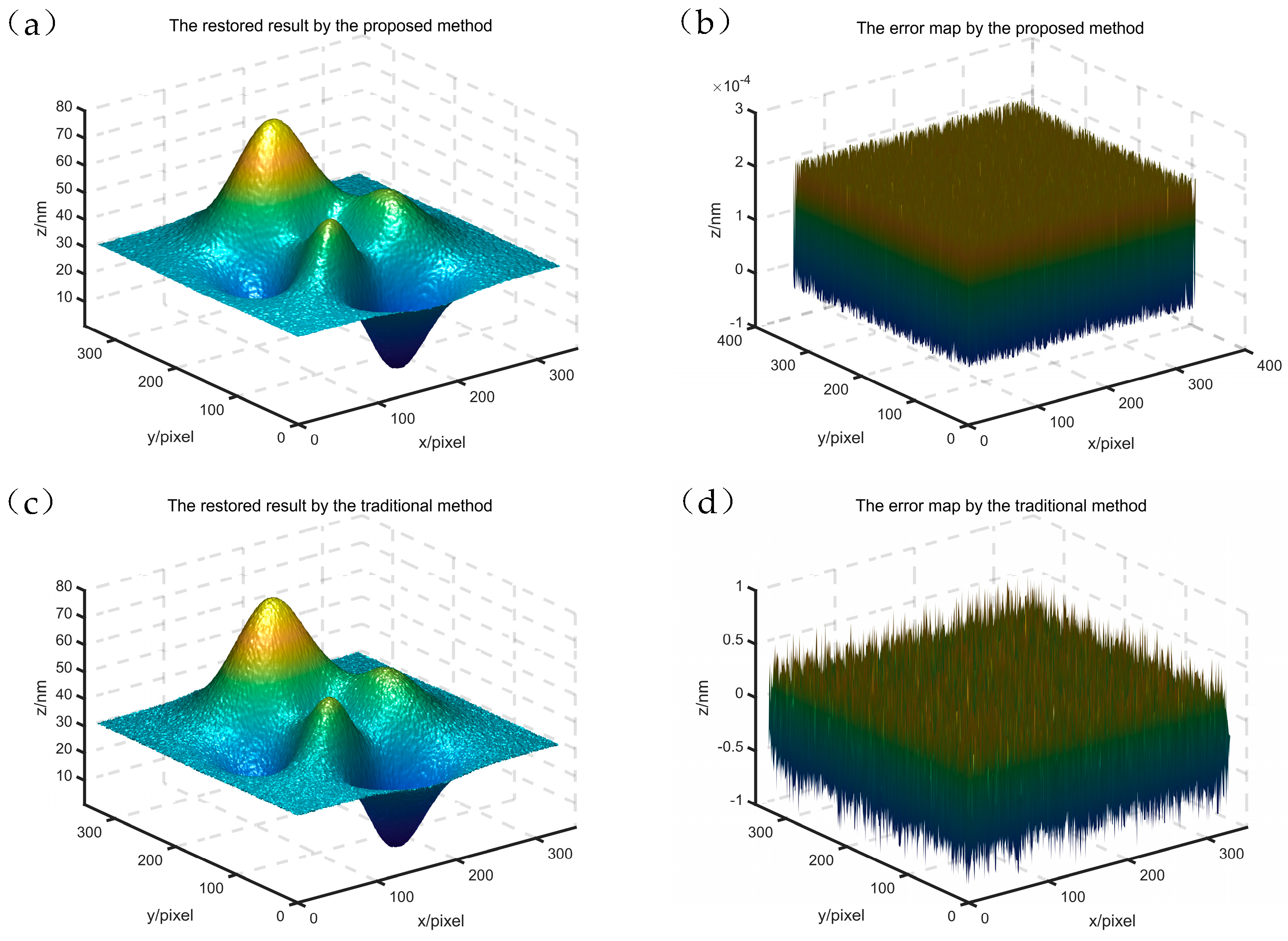
3.1. Simulation
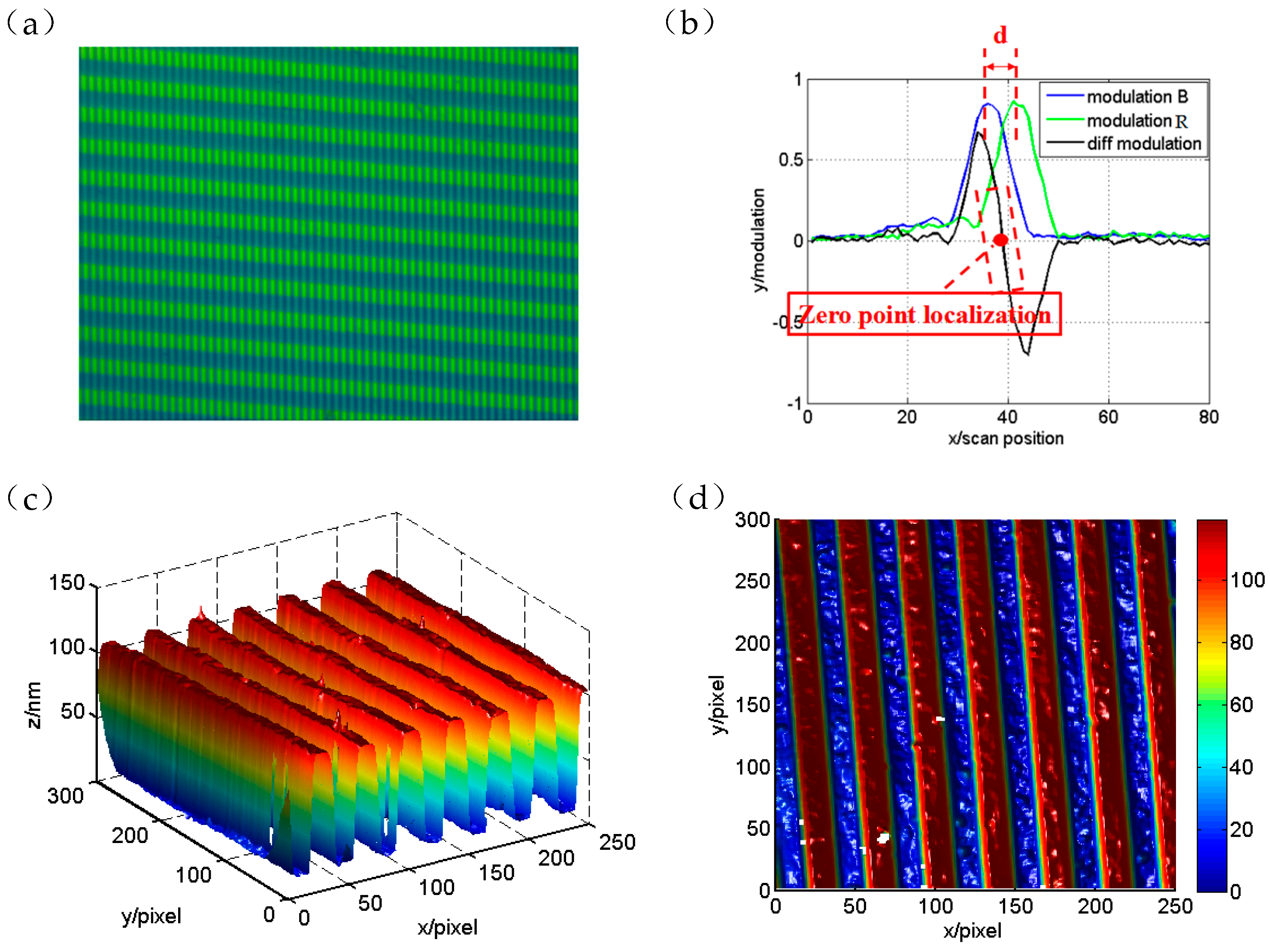
3.2. Experiment
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Moussata, D.; Goetz, M.; Gloeckner, A.; Kerner, M.; Campbell, B.; Hoffman, A.; Biesterfeld, S.; Flourie, B.; Saurin, S.; Galle, P.R.; et al. Confocal laser endomicroscopy is a new imaging modality for recognition of intramucosal bacteria in inflammatory bowel disease in vivo. Gut 2011, 60, 26–33. [Google Scholar] [CrossRef] [PubMed]
- Michels, J.; Gorb, S.N. Detailed three-dimensional visualization of resilin in the exoskeleton of arthropods using confocal laser scanning microscopy: Detailed three-dimensional visualization of resilin. J. Microsc. 2012, 245, 1–16. [Google Scholar] [CrossRef]
- Ferraro, V.; Wang, Z.; Miccio, L.; Maffettone, P.L. Full-Field and Quantitative Analysis of a Thin Liquid Film at the Nanoscale by Combining Digital Holography and White Light Interferometry. J. Phys. Chem. C 2021, 125, 1075–1086. [Google Scholar] [CrossRef]
- Gouveia, C.; Zibaii, M.; Latifi, H.; Marques, M.J.; Baptista, J.M.; Jorge, P.A. High resolution temperature independent refractive index measurement using differential white light interferometry. Sens. Actuators B Chem. 2013, 188, 1212–1217. [Google Scholar] [CrossRef]
- Gong, Z.; Gao, T.; Chen, Y.; Zhang, B.; Peng, W.; Yu, Q.; Ma, F.; Mei, L.; Chen, K. Sub-ppb level detection of nitrogen dioxide based on an optimized H-type longitudinal acoustic resonator and a lock-in white-light interferometry demodulation algorithm. J. Quant. Spectrosc. Radiat. Transf. 2020, 253, 107136. [Google Scholar] [CrossRef]
- Ilhan, H.A.; Doğar, M.; Özcan, M. Digital holographic microscopy and focusing methods based on image sharpness: Holographic microscopy and focusing. J. Microsc. 2014, 255, 138–149. [Google Scholar] [CrossRef]
- Molaei, M.; Sheng, J. Imaging bacterial 3D motion using digital in-line holographic microscopy and correlation-based de-noising algorithm. Opt. Express 2014, 22, 32119. [Google Scholar] [CrossRef] [PubMed]
- Righolt, C.H.; Slotman, J.A.; Young, I.T.; Mai, S.; van Vliet, L.J.; Stallinga, S. Image filtering in structured illumination microscopy using the Lukosz bound. Opt. Express 2013, 21, 24431. [Google Scholar] [CrossRef] [PubMed]
- Mandula, O.; Kielhorn, M.; Wicker, K.; Krampert, G.; Kleppe, I.; Heintzmann, R. Line scan-structured illumination microscopy super-resolution imaging in thick fluorescent samples. Opt. Express 2012, 20, 24167. [Google Scholar] [CrossRef]
- Zuo, C.; Feng, S.; Huang, L.; Tao, T.; Yin, W.; Chen, Q. Phase shifting algorithms for fringe projection profilometry: A review. Opt. Lasers Eng. 2018, 109, 23–59. [Google Scholar] [CrossRef]
- Huang, M.; Jiang, K.; Shen, Z. Enhancing plasmonic structured illumination microscopy with surface plasmon coupled emission. Opt. Lett. 2025, 50, 483–486. [Google Scholar] [CrossRef] [PubMed]
- Ordóñez, L.; Lenz, A.J.; Ipus, E.; Lancis, J.; Tajahuerce, E. Single-pixel microscopy with optical sectioning. Opt. Express 2024, 32, 26038–26051. [Google Scholar] [CrossRef] [PubMed]
- Xie, Z.; Tang, Y.; Zhou, Y.; Deng, Q. Surface and thickness measurement of transparent thin-film layers utilizing modulation-based structured-illumination microscopy. Opt. Express 2018, 26, 2944. [Google Scholar] [CrossRef] [PubMed]
- Neil, M.A.; Juškaitis, R.; Wilson, T. Method of obtaining optical sectioning by using structured light in a conventional microscope. Opt. Lett. 1997, 22, 1905. [Google Scholar] [CrossRef] [PubMed]
- Patorski, K.; Trusiak, M.; Tkaczyk, T. Optically-sectioned two-shot structured illumination microscopy with Hilbert-Huang processing. Opt. Express 2014, 22, 9517. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Group | Measurement Result | Measurement Error |
|---|---|---|
| Group 1 | 139.8 nm | 1.5 nm |
| Group 2 | 141.6 nm | 3.3 nm |
| Group 3 | 137.2 nm | 1.1 nm |
| Group 4 | 143.2 nm | 4.9 nm |
| Group 5 | 141.8 nm | 3.5 nm |
| Group 6 | 139.5 nm | 1.2 nm |
| Group 7 | 139.8 nm | 1.5 nm |
| Group 8 | 140.2 nm | 1.9 nm |
| Group 9 | 142.7 nm | 4.4 nm |
| Group 10 | 138.9 nm | 0.6 nm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Zhu, X.; Zhou, H.; Xu, L.; Zhou, X.; Liu, W. Improved Accuracy of the 3D Measurement Method Utilizing Differential Modulation Based on Multi-Color Channel Fusion. Photonics 2025, 12, 172. https://doi.org/10.3390/photonics12030172
Liu L, Zhu X, Zhou H, Xu L, Zhou X, Liu W. Improved Accuracy of the 3D Measurement Method Utilizing Differential Modulation Based on Multi-Color Channel Fusion. Photonics. 2025; 12(3):172. https://doi.org/10.3390/photonics12030172
Chicago/Turabian StyleLiu, Lei, Xusheng Zhu, Hexiang Zhou, Long Xu, Xinming Zhou, and Wei Liu. 2025. "Improved Accuracy of the 3D Measurement Method Utilizing Differential Modulation Based on Multi-Color Channel Fusion" Photonics 12, no. 3: 172. https://doi.org/10.3390/photonics12030172
APA StyleLiu, L., Zhu, X., Zhou, H., Xu, L., Zhou, X., & Liu, W. (2025). Improved Accuracy of the 3D Measurement Method Utilizing Differential Modulation Based on Multi-Color Channel Fusion. Photonics, 12(3), 172. https://doi.org/10.3390/photonics12030172