Humidity Sensing Using a Multimode Fiber Ring Laser with Thermal Compensation





Abstract
1. Introduction
2. Experimental Setup and Operation Principle
3. Experimental Methods and Calibration Tests
3.1. Optical Spectrum and Frequency Spectrum
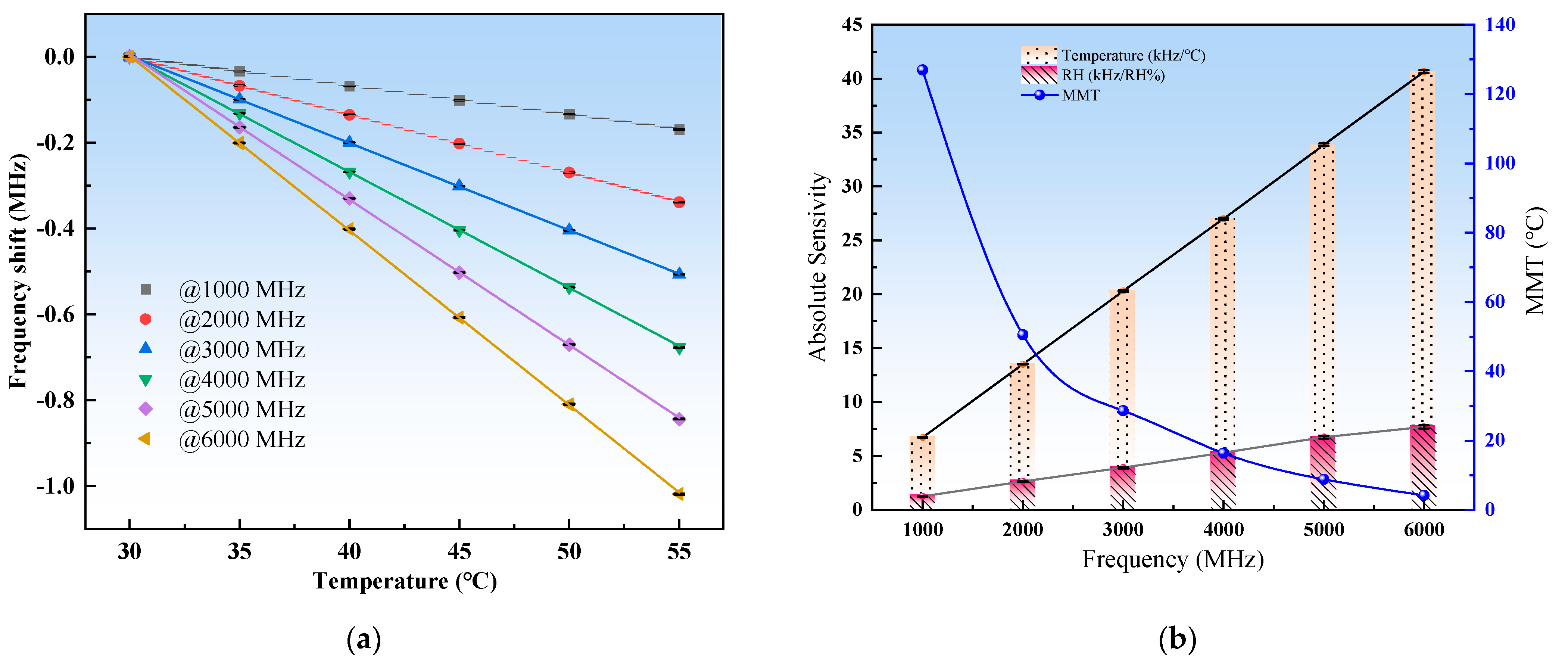
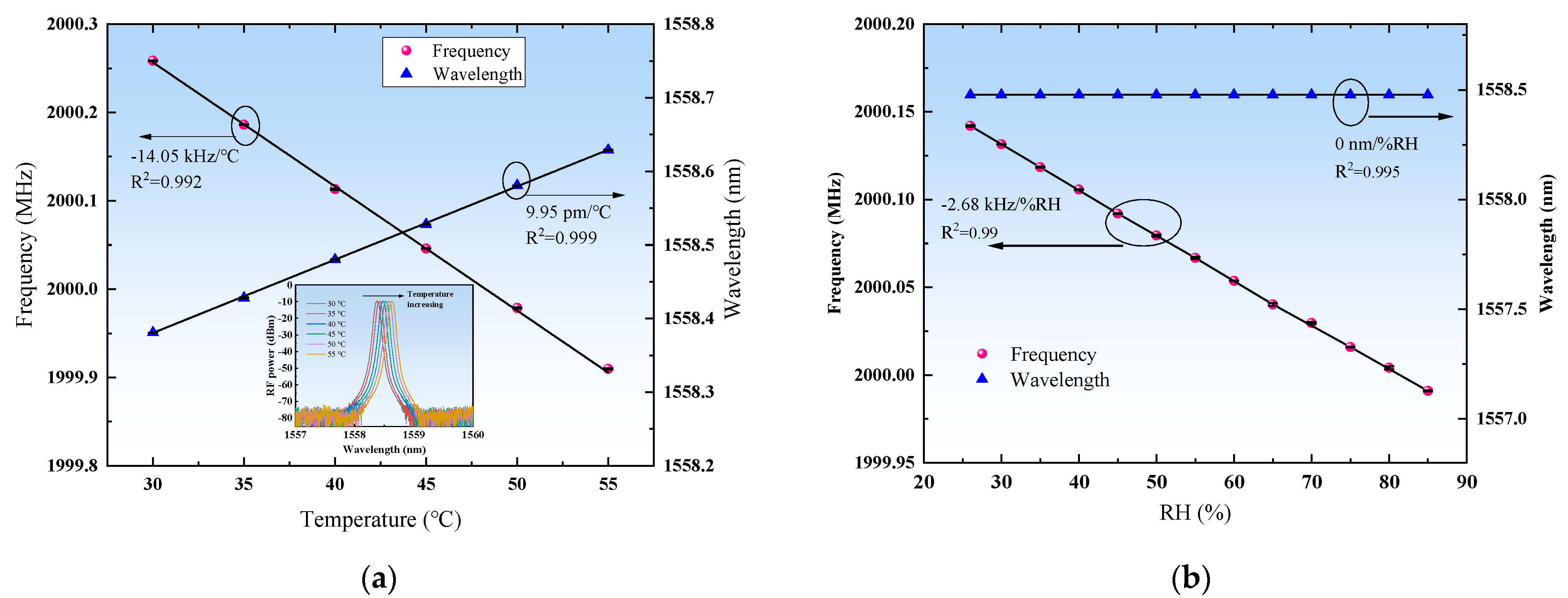
3.2. Experimental Investigation of BFSs Response
3.3. Experimental Investigation of Wavelength Response
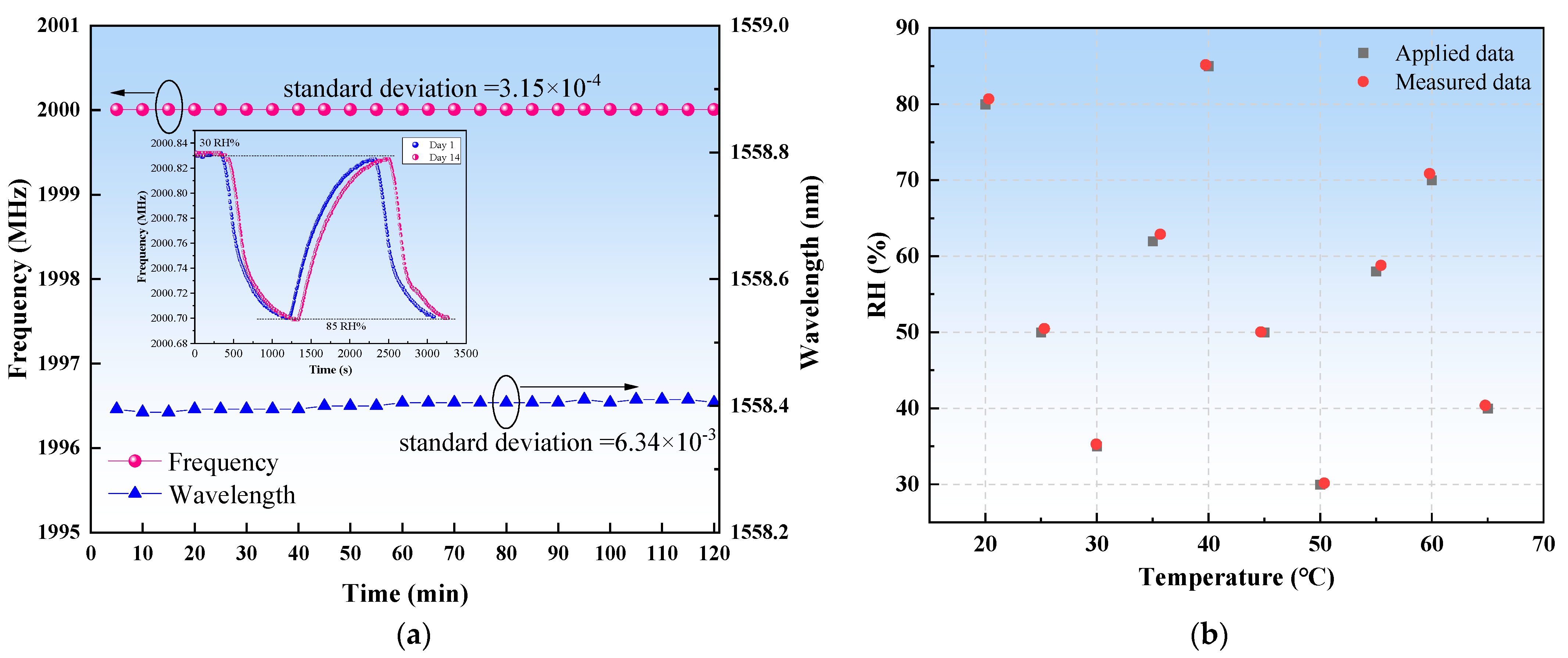
4. Experiment Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Farahani, H.; Wagiran, R.; Hamidon, M. Humidity Sensors Principle, Mechanism, and Fabrication Technologies: A Comprehensive Review. Sensors 2014, 14, 7881–7939. [Google Scholar] [CrossRef] [PubMed]
- Sikarwar, S.; Yadav, B.C. Opto-Electronic Humidity Sensor: A Review. Sens. Actuators A Phys. 2015, 233, 54–70. [Google Scholar] [CrossRef]
- Wang, Y.; Li, J.; Guo, L.-N.; Tian, M.; Meng, F. Development of Fabrication Technique and Sensing Performance of Optical Fiber Humidity Sensors in the Most Recent Decade. Measurement 2023, 215, 112888. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, C.; Xia, K.; Peng, S.; Guan, H.; Tang, J.; Lu, H.; Yu, J.; Zhang, J.; Xiao, Y.; et al. Tungsten Disulfide (WS_2) Based All-Fiber-Optic Humidity Sensor. Opt. Express 2016, 24, 8956. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.-Y.; Shi, B.; Sun, M.-Y.; Zhang, C.-C.; Wei, G.-Q.; Liu, J. Characterization of an ORMOCER®-Coated FBG Sensor for Relative Humidity Sensing. Measurement 2021, 171, 108851. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, Q.; Zhu, W.; Yang, M. Simultaneous Measurement of Temperature and Relative Humidity Based on FBG and FP Interferometer. IEEE Photon. Technol. Lett. 2018, 30, 833–836. [Google Scholar] [CrossRef]
- Hromadka, J.; Mohd Hazlan, N.N.; Hernandez, F.U.; Correia, R.; Norris, A.; Morgan, S.P.; Korposh, S. Simultaneous in Situ Temperature and Relative Humidity Monitoring in Mechanical Ventilators Using an Array of Functionalised Optical Fibre Long Period Grating Sensors. Sens. Actuators B Chem. 2019, 286, 306–314. [Google Scholar] [CrossRef]
- Bai, Y.; Miao, Y.; Zhang, H.; Yao, J. Simultaneous Measurement of Temperature and Relative Humidity Based on a Microfiber Sagnac Loop and MoS2. J. Light. Technol. 2020, 38, 840–845. [Google Scholar] [CrossRef]
- Liu, D.; Cai, Z.; Li, B.; Zou, M.; Zhang, L.; Hua, Y.; Mai, J.; Zhao, C.; Liao, C.; He, J.; et al. Simultaneous Measurement of Humidity and Temperature Based on Fiber-Tip Microcantilever Cascaded with Fiber Bragg Grating. Opt. Express 2023, 31, 8738. [Google Scholar] [CrossRef]
- Liao, J.; Qavi, A.; Adolphson, M.; Yang, L. High-Q WGM Resonators Encapsulated in PDMS for Highly Sensitive Displacement Detection. J. Light. Technol. 2022, 41, 2862–2869. [Google Scholar] [CrossRef]
- Cheng, T.; Li, B.; Zhang, F.; Chen, J.; Zhang, Q.; Yan, X.; Zhang, X.; Suzuki, T.; Ohishi, Y.; Wang, F. A Surface Plasmon Resonance Optical Fiber Sensor for Simultaneous Measurement of Relative Humidity and Temperature. IEEE Sens. J. 2022, 22, 3246–3253. [Google Scholar] [CrossRef]
- Yan, J.; Wang, D.N.; Ge, Y.; Guo, Y.; Xu, B. A Humidity Sensor Based on a Whispering-Gallery-Mode Resonator With an L-Shaped Open Microcavity. J. Light. Technol. 2022, 40, 2651–2656. [Google Scholar] [CrossRef]
- Wu, X.; Gao, F.; Jin, F.; Wang, D.N.; Wang, Y.; Chen, Q.; Yang, H.; Gong, H.; Wang, Z.; Zhao, C.; et al. Optical Fiber Humidity Sensor with C60-THAM as Molecule Receptors. Sens. Actuators B Chem. 2022, 370, 132344. [Google Scholar] [CrossRef]
- Cheng, X.; Hu, J.; Zhu, K.; Zhao, Z. High-Resolution Polymer Optical Fibre Humidity Sensor Utilizing Single-Passband Microwave Photonic Filter. Measurement 2021, 179, 109462. [Google Scholar] [CrossRef]
- Xu, Y.; Zhao, X.; Li, Y.; Qin, Z.; Pang, Y.; Liu, Z. Simultaneous Measurement of Relative Humidity and Temperature Based on Forward Brillouin Scattering in Polyimide-Overlaid Fiber. Sens. Actuators B 2021, 348, 130702. [Google Scholar] [CrossRef]
- Gao, L.; Huang, L.; Chen, L.; Chen, X. Study on Fiber Ring Laser in Sensing Application with Beat Frequency Demodulation. Opt. Laser Technol. 2013, 45, 137–141. [Google Scholar] [CrossRef]
- Yin, Z.; Gao, L.; Liu, S.; Zhang, L.; Wu, F.; Chen, L.; Chen, X. Fiber Ring Laser Sensor for Temperature Measurement. J. Light. Technol. 2010, 28, 3403–3408. [Google Scholar] [CrossRef]
- Liu, S.; Yin, Z.; Zhang, L.; Gao, L.; Chen, X.; Cheng, J. Multilongitudinal Mode Fiber Laser for Strain Measurement. Opt. Lett. 2010, 35, 835. [Google Scholar] [CrossRef]
- Qin, Z.; Qu, S.; Wang, Z.; Yang, W.; Li, S.; Liu, Z.; Xu, Y. A Fully Distributed Fiber Optic Sensor for Simultaneous Relative Humidity and Temperature Measurement with Polyimide-Coated Polarization Maintaining Fiber. Sens. Actuators B Chem. 2022, 373, 132699. [Google Scholar] [CrossRef]
- Kronenberg, P.; Rastogi, P.K.; Giaccari, P.; Limberger, H.G. Relative Humidity Sensor with Optical Fiber Bragg Gratings. Opt. Lett. 2002, 27, 1385. [Google Scholar] [CrossRef]
- Huang, X.F.; Sheng, D.R.; Cen, K.F.; Zhou, H. Low-Cost Relative Humidity Sensor Based on Thermoplastic Polyimide-Coated Fiber Bragg Grating. Sens. Actuators B Chem. 2007, 127, 518–524. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | RH Sensitivity | Temperature Sensitivity | RH Error | Fabrication simplicity | Ref. |
|---|---|---|---|---|---|
| Cascaded structure of FBG and FPI | 22.07 pm/%RH | 11.48 pm/°C | 3.88 %RH | Medium | [7] |
| 9.98 pm/°C | |||||
| Fiber-tip microcantilever cascading FBG | 348 pm/%RH | −356 pm/°C | 2.3 %RH | Low | [9] |
| 12 pm/°C | |||||
| SI based Microfiber | 176.6 pm/%RH | −123.5 pm/°C | Not available | Low | [8] |
| −0.017 dB/%RH | −0.079 dB/°C | ||||
| SPR based on No-core fiber | −2.932 nm/%RH (50–65 %RH) | −2.213 nm/°C | Not available | Low | [11] |
| −2.932 nm/%RH (65–70 %RH) | |||||
| FBS in the PI-SMF | 6.32 kHz/%RH | −20.99 kHz/°C | 1.027 %RH | High | [15] |
| 2.56 kHz/%RH | 11.33 kHz/°C | ||||
| PI-SMF and FBG | −2.68 kHz/%RH | −14.05 kHz/°C | 0.67 %RH | High | This work |
| 9.95 pm/°C |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, S.; Ji, Q.; Zhao, X.; Qin, Z.; Liu, Z.; Xu, Y. Humidity Sensing Using a Multimode Fiber Ring Laser with Thermal Compensation. Photonics 2024, 11, 484. https://doi.org/10.3390/photonics11060484
Ma S, Ji Q, Zhao X, Qin Z, Liu Z, Xu Y. Humidity Sensing Using a Multimode Fiber Ring Laser with Thermal Compensation. Photonics. 2024; 11(6):484. https://doi.org/10.3390/photonics11060484
Chicago/Turabian StyleMa, Shaonian, Qiang Ji, Xian Zhao, Zengguang Qin, Zhaojun Liu, and Yanping Xu. 2024. "Humidity Sensing Using a Multimode Fiber Ring Laser with Thermal Compensation" Photonics 11, no. 6: 484. https://doi.org/10.3390/photonics11060484
APA StyleMa, S., Ji, Q., Zhao, X., Qin, Z., Liu, Z., & Xu, Y. (2024). Humidity Sensing Using a Multimode Fiber Ring Laser with Thermal Compensation. Photonics, 11(6), 484. https://doi.org/10.3390/photonics11060484