Single-Shot, Pixel-Encoded Strip Patterns for High-Resolution 3D Measurement


Abstract
1. Introduction
1.1. Related Work
1.2. Major Contribution of This Paper
- (1)
- We combined two approaches proposed by various researchers, i.e., the high-resolution, time multiplexing stripe indexing method with the comparatively low resolution, single-shot, spatially encoded pseudo-random-sequence method to improve its measurement resolution.
- (2)
- Using the multi-resolution system, we proposed pixel-defined, digitally encoded stripe patterns for high-resolution, single-shot 3D measurements.
- (3)
- We computed the proposed method’s percentage increase in feature points, which benefits in increasing the measurement resolution. The results show significant improvements in measuring resolution.
- (4)
- A new strategy for decoding captured image patterns is explained, using stripe indexing and adaptive grid adjustment.
2. Materials and Methods
2.1. Designing of Pattern
2.1.1. Defining Various Stripe Types
2.1.2. Pseudo-Random Sequences or (M-Arrays)
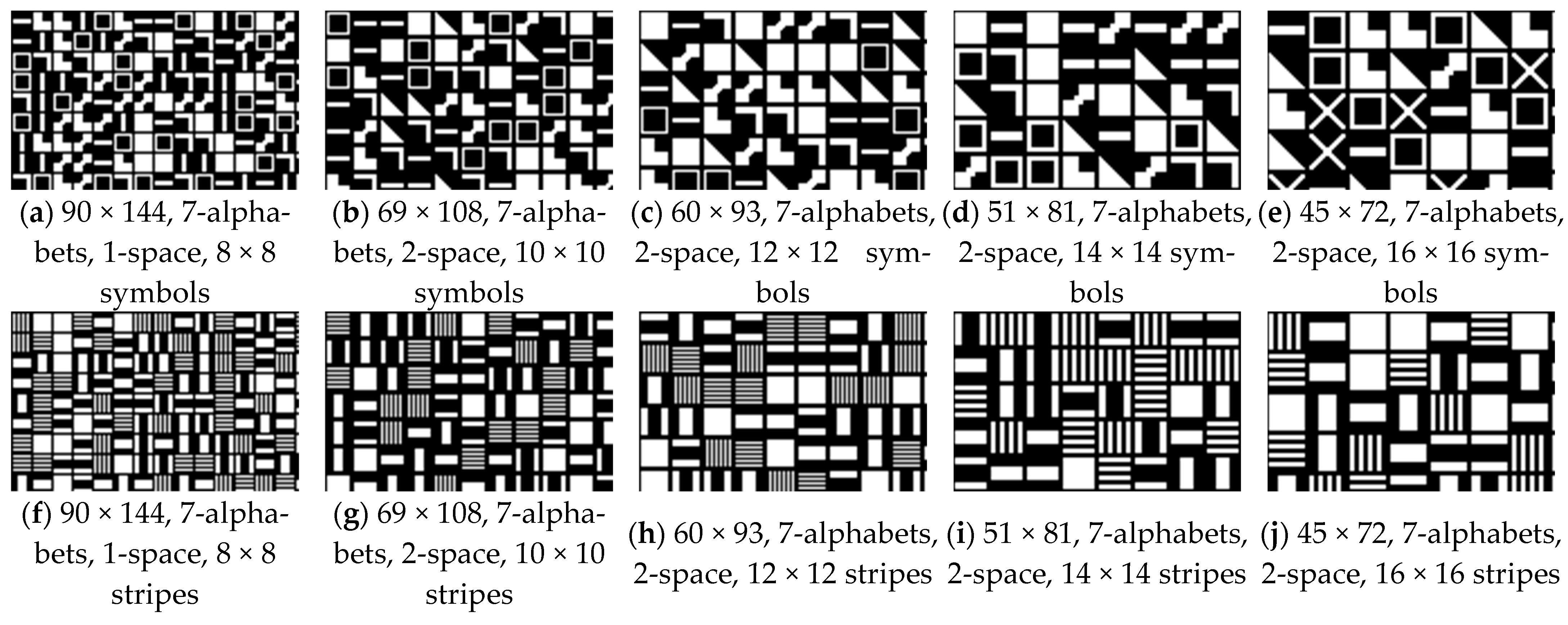
2.1.3. Formation of Projection Pattern
2.1.4. Computation and Comparison of Feature Points
2.2. Decoding of Pattern
2.2.1. Preprocessing, Segmentation, and Labelling
2.2.2. Computation of Parameters
2.2.3. Classification of Stripes
2.2.4. Searching in the Neighborhood
Stripe Indexing and Adaptive Grid Adjustments
Stripe Indexing for Stripe Types 2 and 3
Adaptive Grid Adjustment for Stripe Types 2 and 3
Stripe Indexing for Stripe Types 6 and 7
Adaptive Grid Adjustment for Stripe Types 6 and 7
Finding the Neighborhood Stripes
2.2.5. Establishment of Correspondence
2.3. Camera Calibration and 3D Measurement Model
2.4. Experiment and Devices
2.4.1. Camera and Projector Devices
2.4.2. Target Surfaces
2.4.3. Experiment Setup
Pattern Employed in the Experiment
3. Results
3.1. Comparison of Measured Resolution
3.2. Results of Classification or Decoding of Strips or Feature Points in a Pattern
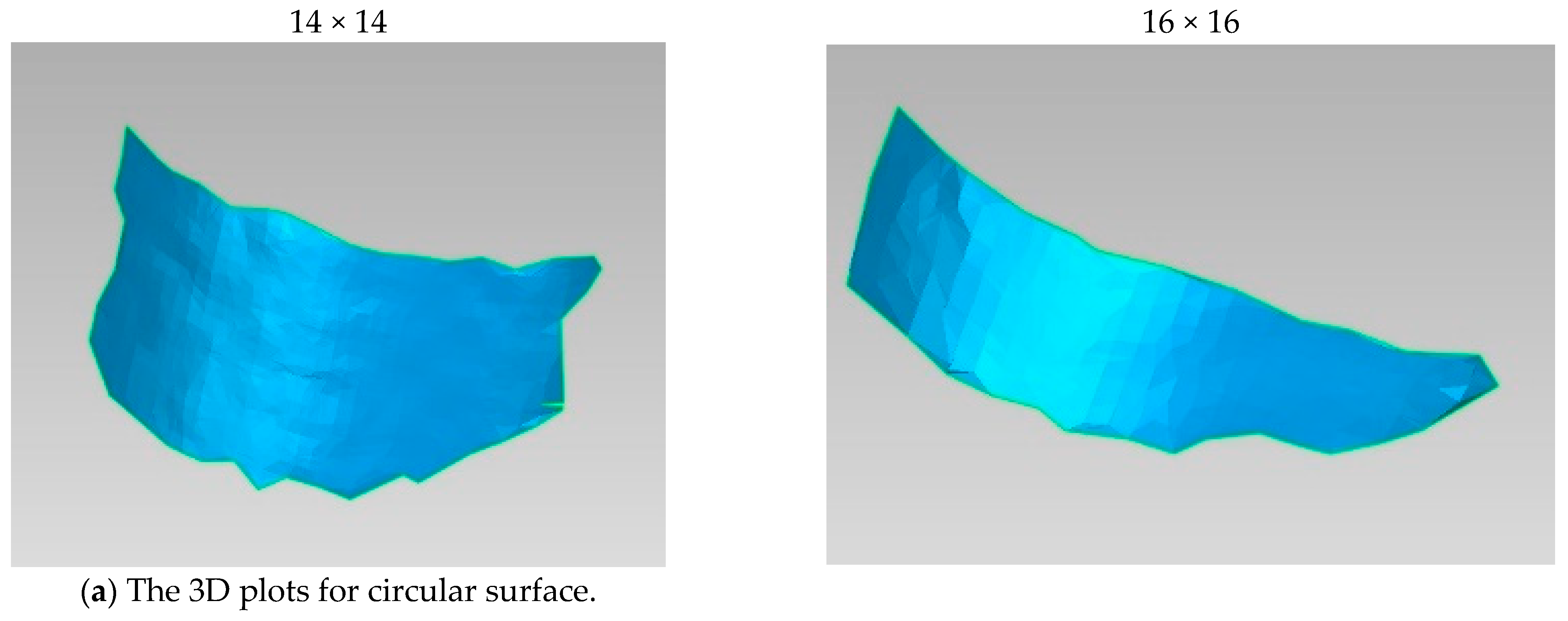
3.3. 3D Plots and Point Clouds of Measuring Surfaces
3.4. Results of Time Calculations
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lyu, B.; Tsai, M.; Chang, C. Infrared Structure Light Projector Design for 3D Sensing. In Proceedings of the Conference on Optical Design and Engineering VII (SPIE Optical Systems Design), Frankfurt, Germany, 14–17 May 2018; Mazuray, L., Mazuray, L., Wartmann, R., Wartmann, R., Wood, A.P., Wood, A., Eds.; SPIE: Frankfurt, Germany, 2018. [Google Scholar]
- Albitar, C.; Graebling, P.; Doignon, C. Robust Structured Light Coding for 3D Reconstruction. In Proceedings of the 11th IEEE International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–21 October 2007; IEEE: Rio De Janeiro, Brazil, 2007; pp. 7–12. [Google Scholar]
- Yang, L.; Liu, Y.; Peng, J. Advances Techniques of the Structured Light Sensing in Intelligent Welding Robots: A Review. Adv. Manuf. Technol. 2020, 110, 1027–1046. [Google Scholar] [CrossRef]
- He, Q.; Zhang, X.; Ji, Z.; Gao, H.; Yang, G. A Novel and Systematic Signal Extraction Method for High-Temperature Object Detection via Structured Light Vision. IEEE Trans. Instrum. Meas. 2022, 71, 1–14. [Google Scholar] [CrossRef]
- Drouin, M.-A.; Beraldin, J.-A. Active Triangulation 3D Imaging Systems for Industrial Inspection. In 3D Imaging, Analysis and Applications; Liu, Y., Pears, N., Rosin, P.L., Huber, P., Eds.; Springer Nature: Ottawa, ON, Canada, 2020; pp. 109–165. [Google Scholar]
- Molleda, J.; Usamentiaga, R.; Garcıa, D.F.; Bulnes, F.G.; Espina, A.; Dieye, B.; Smith, L.N. An Improved 3D Imaging System for Dimensional Quality Inspection of Rolled Products in the Metal Industry. Comput. Ind. 2013, 64, 1186–1200. [Google Scholar] [CrossRef]
- Zhang, C.; Zhao, C.; Huang, W.; Wang, Q.; Liu, S.; Li, J.; Guo, Z. Automatic Detection of Defective Apples Using NIR Coded Structured Light and Fast Lightness Correction. J. Food Eng. 2017, 203, 69–82. [Google Scholar] [CrossRef]
- Salvi, J.; Fernandez, S.; Pribanic, T.; Llado, X. A State of the Art in Structured Light Patterns for Surface Profilometry. Pattern Recognit. 2010, 43, 2666–2680. [Google Scholar] [CrossRef]
- Webster, J.G.; Bell, T.; Li, B.; Zhang, S. Structured Light Techniques and Applications. Wiley Encycl. Electr. Electron. Eng. 2016, 1–24. [Google Scholar] [CrossRef]
- Zhang, S. High-Speed 3D Shape Measurement with Structured Light Methods: A Review. Opt. Lasers Eng. 2018, 106, 119–131. [Google Scholar] [CrossRef]
- Salvi, J.; Pagès, J.; Batlle, J. Pattern Codification Strategies in Structured Light Systems. Pattern Recognit. 2004, 37, 827–849. [Google Scholar] [CrossRef]
- Villena-martínez, V.; Fuster-guilló, A.; Azorín-lópez, J.; Saval-calvo, M.; Mora-pascual, J.; Garcia-rodriguez, J.; Garcia-garcia, A. A Quantitative Comparison of Calibration Methods for RGB-D Sensors Using Different Technologies. Sensors 2017, 17, 243. [Google Scholar] [CrossRef]
- Hall-Holt, O.; Rusinkiewicz, S. Stripe Boundary Codes for Real-Time Structured-Light Range Scanning of Moving Objects. In Proceedings of the IEEE International Conference on Computer Vision 2001, Vancouver, BC, Canada, 7–14 July 2001; Volume 2, pp. 359–366. [Google Scholar] [CrossRef]
- Rusinkiewicz, S.; Hall-Holt, O.; Levoy, M. Real-Time 3D Model Acquisition. ACM Trans. Graph. 2002, 21, 438–446. [Google Scholar] [CrossRef]
- Nguyen, H.; Wang, Y.; Wang, Z. Single-Shot 3D Shape Reconstruction Using Structured Light and Deep Convolutional Neural Networks. Sensors 2020, 20, 3718. [Google Scholar] [CrossRef]
- Pan, B.; Xie, H.; Gao, J.; Asundi, A. Improved Speckle Projection Profilometry for Out-of-Plane Shape Measurement. Appl. Opt. 2008, 47, 5527–5533. [Google Scholar] [CrossRef]
- Posdamer, J.L.; Altschuler, M.D. Surface Measurement by Space-Encoded Projected Beam Systems. Comput. Graph. Image Process. 1982, 18, 1–17. [Google Scholar] [CrossRef]
- Gühring, J. Dense 3-D Surface Acquisition by Structured Light Using off-the-Shelf Components. In Proceedings of the SPIE Proceedings 4309, Videometrics and Optical Methods for 3D Shape Measurement, San Jose, CA, USA, 22–23 January 2001; SPIE: San Jose, CA, USA, 2001. [Google Scholar]
- Er, M.C. On Generating the N-Ary Reflected Gray Codes. IEEE Trans. Comput. 1984, 33, 739–741. [Google Scholar] [CrossRef]
- Horn, E.; Kiryati, N. Toward Optimal Structured Light Patterns. Image Vis. Comput. 1999, 17, 87–97. [Google Scholar] [CrossRef]
- Liu, B.; Yang, F.; Huang, Y.; Zhang, Y.; Wu, G. Single-Shot Three-Dimensional Reconstruction Using Grid Pattern-Based Structured-Light Vision Method. Appl. Sci. 2022, 12, 10602. [Google Scholar] [CrossRef]
- Durdle, N.G.; Thayyoor, J.; Raso, V.J. An Improved Structured Light Technique for Surface Reconstruction of the Human Trunk. In Proceedings of the IEEE Canadian Conference on Electrical and Computer Engineering, Waterloo, ON, Canada, 25–28 May 1998; IEEE: Waterloo, ON, Canada, 1998; pp. 874–877. [Google Scholar]
- Maruyama, M.; Abe, S. Range Sensing by Projecting Multiple Slits with Random Cuts. IEEE Trans. Pattern Anal. Mach. Intell. 1993, 15, 647–651. [Google Scholar] [CrossRef]
- Je, C.; Lee, S.W.; Park, R.H. High-Contrast Color-Stripe Pattern for Rapid Structured-Light Range Imaging. In Proceedings of the Eighth European Conference on Computer Vision (ECCV), Prague, Czech Republic, 11–14 May 2004; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2004; Volume 3021, pp. 95–107. [Google Scholar]
- Je, C.; Lee, S.W.; Park, R.H. Colour-Stripe Permutation Pattern for Rapid Structured-Light Range Imaging. Opt. Commun. 2012, 285, 2320–2331. [Google Scholar] [CrossRef]
- Ahsan, E.; QiDan, Z.; Jun, L.; Yong, L.; Muhammad, B. Grid-Indexed Based Three-Dimensional Profilometry. In Coded Optical Imaging; Liang, D.J., Ed.; Springer Nature: Ottawa, ON, Canada, 2023. [Google Scholar]
- Zuo, C.; Feng, S.; Huang, L.; Tao, T.; Yin, W.; Chen, Q. Phase Shifting Algorithms for Fringe Projection Profilometry: A Review. Opt. Lasers Eng. 2018, 109, 23–59. [Google Scholar] [CrossRef]
- Ito, M.; Ishii, A. A Three-Level Checkerboard Pattern (TCP) Projection Method for Curved Surface Measurement. Pattern Recognit. 1995, 28, 27–40. [Google Scholar] [CrossRef]
- Hugli, H.; Maitre, G. Generation And Use Of Color Pseudo Random Sequences For Coding Structured Light In Active Ranging. Ind. Insp. 2012, 1010, 75. [Google Scholar] [CrossRef]
- Pagès, J.; Salvi, J.; Collewet, C.; Forest, J. Optimised de Bruijn Patterns for One-Shot Shape Acquisition. Image Vis. Comput. 2005, 23, 707–720. [Google Scholar] [CrossRef]
- Zhang, L.; Curless, B.; Seitz, S.M. Rapid Shape Acquisition Using Color Structured Light and Multi-Pass Dynamic Programming. In Proceedings of the Proceedings—1st International Symposium on 3D Data Processing Visualization and Transmission, 3DPVT 2002, Padova, Italy, 19–21 June 2002; IEEE Computer Society: Montreal, QC, Canada, 2002; pp. 24–36. [Google Scholar]
- Ha, M.; Xiao, C.; Pham, D.; Ge, J. Complete Grid Pattern Decoding Method for a One-Shot Structured Light System. Appl. Opt. 2020, 59, 2674–2685. [Google Scholar] [CrossRef]
- Elahi, A.; Lu, J.; Zhu, Q.D.; Yong, L. A Single-Shot, Pixel Encoded 3D Measurement Technique for Structure Light. IEEE Access 2020, 8, 127254–127271. [Google Scholar] [CrossRef]
- Morano, R.A.; Ozturk, C.; Conn, R.; Dubin, S.; Zietz, S.; Nissanov, J. Structured Light Using Pseudorandom Codes. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 322–327. [Google Scholar] [CrossRef]
- Lu, J.; Han, J.; Ahsan, E.; Xia, G.; Xu, Q. A Structured Light Vision Measurement with Large Size M-Array for Dynamic Scenes. In Proceedings of the 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; IEEE: Chengdu, China, 2016; pp. 3834–3839. [Google Scholar]
- Chen, S.Y.; Li, Y.F.; Zhang, J. Vision Processing for Realtime 3-D Data Acquisition Based on Coded Structured Light. IEEE Trans. Image Process. 2008, 17, 167–176. [Google Scholar] [CrossRef]
- Li, F.; Shang, X.; Tao, Q.; Zhang, T.; Shi, G.; Niu, Y. Single-Shot Depth Sensing with Pseudo Two-Dimensional Sequence Coded Discrete Binary Pattern. IEEE Sens. J. 2021, 21, 11075–11083. [Google Scholar] [CrossRef]
- Wijenayake, U.; Choi, S.I.; Park, S.Y. Combination of Color and Binary Pattern Codification for an Error Correcting M-Array Technique. In Proceedings of the 2012 9th Conference on Computer and Robot Vision, CRV 2012, Toronto, ON, Canada, 28–30 May 2012; pp. 139–146. [Google Scholar] [CrossRef]
- Yin, W.; Cao, L.; Zhao, H.; Hu, Y.; Feng, S.; Zhang, X.; Shen, D.; Wang, H.; Chen, Q.; Zuo, C. Real-Time and Accurate Monocular 3D Sensor Using the Reference Plane Calibration and an Optimized SGM Based on Opencl Acceleration. Opt. Lasers Eng. 2023, 165. [Google Scholar] [CrossRef]
- Yin, W.; Hu, Y.; Feng, S.; Huang, L.; Kemao, Q.; Chen, Q.; Zuo, C. Single-Shot 3D Shape Measurement Using an End-to-End Stereo Matching Network for Speckle Projection Profilometry. Opt. Express 2021, 29, 13388. [Google Scholar] [CrossRef]
- Yin, W.; Feng, S.; Tao, T.; Huang, L.; Trusiak, M.; Chen, Q.; Zuo, C. High-Speed 3D Shape Measurement Using the Optimized Composite Fringe Patterns and Stereo-Assisted Structured Light System. Opt. Express 2019, 27, 2411. [Google Scholar] [CrossRef]
- Petriu, E.M.; Sakr, Z.; Spoelder, H.J.W.; Moica, A. Object Recognition Using Pseudo-Random Color Encoded Structured Light. In Proceedings of the 17th IEEE Instrumentation and Measurement Technology Conference, Baltimore, MD, USA, 1–4 May 2000; IEEE: Baltimore, MD, USA, 2000; pp. 1237–1241. [Google Scholar]
- Salvi, J.; Batlle, J.; Mouaddib, E. A Robust-Coded Pattern Projection for Dynamic 3D Scene Measurement. Pattern Recognit. Lett. 1998, 19, 1055–1065. [Google Scholar] [CrossRef]
- Griffin, P.M.; Narasimhan, L.S.; Yee, S.R. Generation of Uniquely Encoded Light Patterns for Range Data Acquisition. Pattern Recognit. 1992, 25, 609–616. [Google Scholar] [CrossRef]
- Desjardins, D.; Payeur, P. Dense Stereo Range Sensing with Marching Pseudo-Random Patterns. In Proceedings of the Proceedings—Fourth Canadian Conference on Computer and Robot Vision, CRV 2007, Montreal, QC, Canada, 28–30 May 2007; IEEE Computer Society: Montreal, QC, Canada, 2007; pp. 216–223. [Google Scholar]
- Payeur, P.; Desjardins, D. Structured Light Stereoscopic Imaging with Dynamic Pseudo-Random Patterns. In 6th International Conference, ICIAR 2009, Halifax, Canada, 6–8 July 2009; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2009; Volume 5627, pp. 687–696. [Google Scholar]
- Chen, S.Y.; Li, Y.F.; Zhang, J. Realtime Structured Light Vision with the Principle of Unique Color Codes. Proc. IEEE Int. Conf. Robot. Autom. 2007, 429–434. [Google Scholar] [CrossRef]
- Song, Z.; Chung, R. Grid Point Extraction Exploiting Point Symmetry in a Pseudo-Random Color Pattern. In Proceedings of the 15th IEEE International Conference of Image Processing, San Diego, CA, USA, 12–15 October 2008; IEEE: San Diego, CA, USA, 2008; pp. 1956–1959. [Google Scholar]
- Song, Z.; Chung, R. Determining Both Surface Position and Orientation in Structured-Light-Based Sensing. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1770–1780. [Google Scholar] [CrossRef]
- Lin, H.; Nie, L.; Song, Z. A Single-Shot Structured Light Means by Encoding Both Color and Geometrical Features. Pattern Recognit. 2016, 54, 178–189. [Google Scholar] [CrossRef]
- Shi, G.; Li, R.; Li, F.; Niu, Y.; Yang, L. Depth Sensing with Coding-Free Pattern Based on Topological Constraint. J. Vis. Commun. Image Represent. 2018, 55, 229–242. [Google Scholar] [CrossRef]
- Albitar, C.; Graebling, P.; Doignon, C. Design of a Monocular Pattern for a Robust Structured Light Coding. In Proceedings of the IEEE International Conference on Image Processing, San Antonio, TX, USA, 16 September–19 October 2007; IEEE: San Antonio, TX, USA, 2007; pp. 529–532. [Google Scholar]
- Lei, Y.; Bengtson, K.R.; Li, L.; Allebach, J.P. Design and Decoding of an M-Array Pattern for Low-Cost Structured 3D Reconstruction Systems. In Proceedings of the 2013 IEEE International Conference on Image Processing, Melbourne, VIC, Australia, 15–18 September 2013; pp. 2168–2172. [Google Scholar]
- Tang, S.; Zhang, X.; Song, Z.; Jiang, H.; Nie, L. Three-Dimensional Surface Reconstruction via a Robust Binary Shape-Coded Structured Light Method. Opt. Eng. 2017, 56, 014102. [Google Scholar] [CrossRef]
- Zhou, X.; Zhou, C.; Kang, Y.; Zhang, T.; Mou, X. Pattern Encoding of Robust M-Array Driven by Texture Constraints. IEEE Trans. Instrum. Meas. 2023, 72, 5014816. [Google Scholar] [CrossRef]
- Gu, F.; Du, H.; Wang, S.; Su, B.; Song, Z. High-Capacity Spatial Structured Light for Robust and Accurate Reconstruction. Sensors 2023, 23, 4685. [Google Scholar] [CrossRef]
- Zhao, Z.; Xin, B.; Li, L.; Huang, Z.-L. High-Power Homogeneous Illumination for Super-Resolution Localization Microscopy with Large Field-of-View. Opt. Express 2017, 25, 13382. [Google Scholar] [CrossRef]
- Savage, N. Digital Spatial Light Modulator. Nat. Photonics 2009, 3, 170–172. [Google Scholar] [CrossRef]
- Neff, J.A.; Athale, R.A.; Lee, S.H. Two-Dimensional Spatial Light Modulators: A Tutorial. Proc. IEEE 1990, 78, 826–855. [Google Scholar] [CrossRef]
- Bui, L.Q.; Lee, S. A Method of Eliminating Interreflection in 3D Reconstruction Using Structured Light 3D Camera The Appearance of Interreflection. In Proceedings of the 2014 9th International Conference on Computer Vision, Theory and Applications (Visapp 2014), Lisbon, Portugal, 5–8 January 2014; IEEE: Lisbon, Portugal, 1993; Volume 3. [Google Scholar]
- Nguyen, H.; Ly, K.L.; Li, C.Q.; Wang, Z. Single-Shot 3D Shape Acquisition Using a Learning-Based Structured-Light Technique. Appl. Opt. 2022, 61, 8589–8599. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Lu, D.; Qiu, R.; Tao, J. 3D Reconstruction from Structured-light Profilometry with Dual-path Hybrid Network. EURASIP J. Adv. Signal Process. 2022, 2022, 14. [Google Scholar] [CrossRef]
- Nguyen, H.; Wang, Z. Accurate 3D Shape Reconstruction from Single Structured-Light Image via Fringe-to-Fringe Network. Photonics 2021, 8, 459. [Google Scholar] [CrossRef]
- Xtion, A.; Realsense, I. MIMONet: Structured-Light 3D Shape Reconstruction by a Multi-Input Multi-Output Network. Appl. Opt. 2021, 60, 5134–5144. [Google Scholar] [CrossRef]
- Tang, S.; Song, L.; Zeng, H. Robust Pattern Decoding in Shape-Coded Structured Light. Opt. Lasers Eng. 2017, 96, 50–62. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, Y.; Oerlemans, A.; Lao, S.; Wu, S.; Lew, M.S. Deep Learning for Visual Understanding: A Review. Neurocomputing 2016, 187, 27–48. [Google Scholar] [CrossRef]
- Kurnianggoro, L.; Wahyono; Jo, K.H. A Survey of 2D Shape Representation: Methods, Evaluations, and Future Research Directions. Neurocomputing 2018, 300, 1–16. [Google Scholar] [CrossRef]
- Yang, M.; Kpalma, K.; Ronsin, J. A Survey of Shape Feature Extraction Techniques. Pattern Recognit. 2008, 15, 43–90. [Google Scholar]
- Sezgin, M.; Sankur, B. Survey over Image Thresholding Techniques and Quantitative Performance Evaluation. J. Electron. Imaging 2004, 13, 146–165. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shapiro, L.G. Computer and Robot Vision Volume 1; Addison-Wesley Publishing Company: Boston, MA, USA, 1992; ISBN 0201108771. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing; Pearson International Edition Prepared by Pearson Education; Prentice Hall: Kent, OH, USA, 2009; pp. 861–877. [Google Scholar] [CrossRef]
- Sonka, M.; Hlavac, V.; Boyle, R. Image Processing, Analysis, and Machina Vision, 3rd ed.; Thomson: Toronto, ON, Canada, 2008; ISBN 978-0-495-08252-1. [Google Scholar]
- Xie, Z.; Wang, X.; Chi, S. Simultaneous Calibration of the Intrinsic and Extrinsic Parameters of Structured-Light Sensors. Opt. Lasers Eng. 2014, 58, 9–18. [Google Scholar] [CrossRef]
- Nie, L.; Ye, Y.; Song, Z. Method for Calibration Accuracy Improvement of Projector-Camera-Based Structured Light System. Opt. Eng. 2017, 56, 074101. [Google Scholar] [CrossRef][Green Version]
- Huang, B.; Ozdemir, S.; Tang, Y.; Liao, C.; Ling, H. A Single-Shot-Per-Pose Camera-Projector Calibration System for Imperfect Planar Targets. In Proceedings of the Adjunct Proceedings—2018 IEEE International Symposium on Mixed and Augmented Reality, ISMAR-Adjunct 2018, Munich, Germany, 16–20 October 2018; pp. 15–20. [Google Scholar] [CrossRef]
- Moreno, D.; Taubin, G. Simple, Accurate, and Robust Projector-Camera Calibration. In Proceedings of the 2nd Joint 3DIM/3DPVT Conference: 3D Imaging, Modeling, Processing, Visualization and Transmission, 3DIMPVT 2012, Zurich, Switzerland, 13–15 October 2012; pp. 464–471. [Google Scholar] [CrossRef]
- Hu, G.; Stockman, G. 3-D Surface Solution Using Structured Light and Constraint Propagation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 390–402. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stripe Size | Spacing between Consecutive Symbols | No. of Symbols Used in M-Array | M-Array Dimensions (m × n) | Average Hamming Distance | Robust Codewords (%) |
|---|---|---|---|---|---|
| 8 × 8 | 1 | 7 | 90 × 144 | 7.7137 | 99.9963 |
| 10 × 10 | 2 | 7 | 69 × 108 | 7.714 | 99.9968 |
| 12 × 12 | 2 | 7 | 60 × 93 | 7.7143 | 99.9964 |
| 14 × 14 | 2 | 7 | 51 × 81 | 7.719 | 99.9971 |
| 16 × 16 | 2 | 7 | 45 × 72 | 7.7186 | 99.9954 |
| Pattern Resolution (Sres) | Feature Points | Increase in Feature Points Ratio (α) | Increase in Feature Points (%) | |
|---|---|---|---|---|
| Single-Centroid Symbols | Strips Based Projection | |||
| 8 × 8 pixel | 12,496 | 26,701 | 2.1368 | 113.68 |
| 10 × 10 pixel | 6996 | 16,789 | 2.3998 | 139.98 |
| 12 × 12 pixel | 5187 | 13,925 | 2.6846 | 168.46 |
| 14 × 14 pixel | 4000 | 8569 | 2.1423 | 114.22 |
| 16 × 16 pixel | 3124 | 6656 | 2.1306 | 113.06 |
| Symbol | Parameter | Definition |
|---|---|---|
| E | Eccentricity | |
| AR | Aspect ratio | |
| PAR | Perimeter to Area | |
| CR | Circularity or Compactness | |
| Centroid | or | |
| Orientation | ||
| grid | Grid Distance | Major axis + Sspace |
| Stripe Type | Pixel Size | E | AR | PAR | θ | CR |
|---|---|---|---|---|---|---|
Square-shaped strip | 8 × 8 | 0 | 1 | 0.42 | 0 | 1.00 |
| 10 × 10 | 0.35 | 0.94 | ||||
| 12 × 12 | 0.30 | 0.90 | ||||
| 14 × 14 | 0.26 | 0.87 | ||||
| 16 × 16 | 0.23 | 0.85 | ||||
Two parallel horizontal stripes | 8 × 8 | 0.97 | 4 | 0.96 | 0 | 0.86 |
| 10 × 10 | 0.98 | 5 | 0.96 | 0.68 | ||
| 12 × 12 | 0.97 | 4 | 0.70 | 0.72 | ||
| 14 × 14 | 0.98 | 4.67 | 0.69 | 0.63 | ||
| 16 × 16 | 0.97 | 4 | 0.55 | 0.66 | ||
Two parallel vertical stripes | 8 × 8 | 0.97 | 4 | 0.96 | 0.86 | |
| 10 × 10 | 0.98 | 5 | 0.96 | 0.68 | ||
| 12 × 12 | 0.97 | 4 | 0.70 | 0.72 | ||
| 14 × 14 | 0.98 | 4.67 | 0.69 | 0.63 | ||
| 16 × 16 | 0.97 | 4 | 0.55 | 0.66 | ||
One horizontal strip | 8 × 8 | 0.87 | 2 | 0.60 | 0 | 1.00 |
| 10 × 10 | 0.92 | 2.5 | 0.58 | 0.86 | ||
| 12 × 12 | 0.87 | 2 | 0.43 | 0.86 | ||
| 14 × 14 | 0.90 | 2.33 | 0.42 | 0.80 | ||
| 16 × 16 | 0.87 | 2 | 0.33 | 0.81 | ||
One vertical strip | 8 × 8 | 0.87 | 2 | 0.60 | 1.00 | |
| 10 × 10 | 0.92 | 2.5 | 0.58 | 0.86 | ||
| 12 × 12 | 0.87 | 2 | 0.43 | 0.86 | ||
| 14 × 14 | 0.90 | 2.33 | 0.42 | 0.80 | ||
| 16 × 16 | 0.87 | 2 | 0.33 | 0.81 | ||
Multiple parallel vertical stripes | 8 × 8 | 0.99 | 8 | 1.72 | 0.53 | |
| 10 × 10 | 0.99 | 10 | 1.76 | 0.40 | ||
| 12 × 12 | 1.00 | 12 | 1.80 | 0.32 | ||
| 14 × 14 | 0.99 | 7 | 0.97 | 0.48 | ||
| 16 × 16 | 0.99 | 8 | 0.97 | 0.42 | ||
Multiple parallel horizontal stripes | 8 × 8 | 0.99 | 8 | 1.72 | 0 | 0.53 |
| 10 × 10 | 0.99 | 10 | 1.76 | 0.40 | ||
| 12 × 12 | 1.00 | 12 | 1.80 | 0.32 | ||
| 14 × 14 | 0.99 | 7 | 0.97 | 0.48 | ||
| 16 × 16 | 0.99 | 8 | 0.97 | 0.42 |
| Pattern Resolution | Depth (z) cm | Area (cm2) | Proposed Method | Ahsan [33] (2020) | Zhou [55] (2023) | Bin Liu [21] (2022) | F. Li [37] (2021) | Nguyen [15] (2020) | Yin [40,41] (2019, 2021) | Wijenayake [38] (2012) | Chen [36,47] (2008) | Albiter [2,52] (2007) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Resolution (mm) | Resolution (mm) | Resolution (mm) | Resolution (mm) | Resolution (mm) | Resolution (mm) | Resolution (mm) | Resolution (mm) | Resolution (mm) | Resolution (mm) | |||
| 8 × 8 | 250 | 103.8 × 166 | 5.5 | 11.8 | 26.7 | 64.7 (area reduced to 103.8 × 103.8) | 25.9 | 41.4 | 25.9 | 23 (area reduced to 99.3 × 99.3) | 32.5 | 37.5 (area reduced to 103.8 × 111.5) |
| 10 × 10 | 6.0 | 14.3 | ||||||||||
| 12 × 12 | 6.3 | 16.8 | ||||||||||
| 14 × 14 | 9.7 | 20.8 | ||||||||||
| 16 × 16 | 10.9 | 23.3 | ||||||||||
| 8 × 8 | 200 | 83 × 132.8 | 4.4 | 9.4 | 21.3 | 51.7 (area reduced to 83 × 83) | 20.7 | 33.1 | 20.7 | 18.4 (area reduced to 79.4 × 79.4) | 26 | 30 (area reduced to 83 × 89.2) |
| 10 × 10 | 4.8 | 11.4 | ||||||||||
| 12 × 12 | 5.0 | 13.4 | ||||||||||
| 14 × 14 | 7.8 | 16.6 | ||||||||||
| 16 × 16 | 8.7 | 18.6 | ||||||||||
| 8 × 8 | 150 | 62.3 × 99.6 | 3.3 | 7.1 | 16.1 | 38.9 (area reduced to 62.3 × 62.3) | 15.6 | 24.9 | 15.6 | 13.8 (area reduced to 59.6 × 59.6) | 19.5 | 22.5 (area reduced to 62.3 × 66.9) |
| 10 × 10 | 3.6 | 8.6 | ||||||||||
| 12 × 12 | 3.8 | 10.1 | ||||||||||
| 14 × 14 | 5.8 | 12.5 | ||||||||||
| 16 × 16 | 6.6 | 14 | ||||||||||
| 8 × 8 | 120 | 49.8 × 79.7 | 2.6 | 5.6 | 12.7 | 30.8 (area reduced to 49.8 × 49.8) | 12.3 | 19.7 | 12.3 | 11 (area reduced to 47.6 × 47.6) | 15.6 | 18 (area reduced to 49.8 × 53.5) |
| 10 × 10 | 2.8 | 6.8 | ||||||||||
| 12 × 12 | 3.0 | 8 | ||||||||||
| 14 × 14 | 4.7 | 10 | ||||||||||
| 16 × 16 | 5.2 | 11.1 | ||||||||||
| 8 × 8 | 100 | 41.5 × 66.4 | 2.2 | 4.7 | 10.7 | 25.8 (area reduced to 41.5 × 41.5) | 10.3 | 16.5 | 10.3 | 9.2 (area reduced to 39.7 × 39.7) | 13 | 15 (area reduced to 41.5 × 44.6) |
| 10 × 10 | 2.4 | 5.7 | ||||||||||
| 12 × 12 | 2.5 | 6.7 | ||||||||||
| 14 × 14 | 3.9 | 8.3 | ||||||||||
| 16 × 16 | 4.4 | 9.3 | ||||||||||
| 8 × 8 | 80 | 33.2 × 53.1 | 1.8 | 3.8 | 8.5 | 20.6 (area reduced to 33.2 × 33.2) | 8.2 | 13.2 | 8.2 | 7.4 (area reduced to 31.8 × 31.8) | 10.4 | 12 (area reduced to 33.2 × 53.1) |
| 10 × 10 | 1.9 | 4.6 | ||||||||||
| 12 × 12 | 2.0 | 5.4 | ||||||||||
| 14 × 14 | 3.1 | 6.6 | ||||||||||
| 16 × 16 | 3.5 | 7.4 | ||||||||||
| 8 × 8 | 60 | 24.9 × 39.8 | 1.3 | 2.8 | 6.4 | 15.6 (area reduced to 24.9 × 24.9) | 6.2 | 10.0 | 6.2 | 5.5 (area reduced to 23.8 × 23.8) | 7.8 | 9 (area reduced to 24.9 × 26.8) |
| 10 × 10 | 1.4 | 3.4 | ||||||||||
| 12 × 12 | 1.5 | 4 | ||||||||||
| 14 × 14 | 2.3 | 5 | ||||||||||
| 16 × 16 | 2.6 | 5.6 | ||||||||||
| 8 × 8 | 40 | 16.6 × 26.6 | 0.9 | 1.9 | 4.2 | 10.3 (area reduced to 16.6 × 16.6) | 4.1 | 7.5 | 4.1 | 3.7 (area reduced to 15.9 × 15.9) | 5.2 | 6 (area reduced to 16.6 × 17.8) |
| 10 × 10 | 0.96 | 2.3 | ||||||||||
| 12 × 12 | 1.01 | 2.7 | ||||||||||
| 14 × 14 | 1.5 | 3.3 | ||||||||||
| 16 × 16 | 1.7 | 3.7 |
| Surface Type | Pattern 1 (Primitives) 16 × 16 Resolution, Depth 80 cm | Pattern 2 (Primitives) 14 × 14 Resolution, Depth 80 cm | Ahsan (2020) 16 × 16 Resolution, Depth 200 cm | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Detected | Decoded | % | Detected | Decoded | % | Detected | Decoded | % | |
| Original Pattern | 6656 | 6656 | 100 | 8569 | 8569 | 100 | 3240 | 3240 | 100 |
| Plane | 4064 | 4064 | 100 | 5163 | 5163 | 100 | 1650 | 1617 | 98 |
| Cylinder | 2183 | 2183 | 100 | 2619 | 2619 | 100 | 1161 | 1128 | 97.1 |
| Sculpture | 1795 | 1788 | 99.6 | 2319 | 2314 | 99.8 | 689 | 585 | 84.9 |
| Surface Type | Method | Resolution | Preprocessing (Filtering + Thresholding) | Labeling | Parameter Calculation | Classification | Correspondence | Rate of Correspondence |
|---|---|---|---|---|---|---|---|---|
| Original Pattern | Ahsan [33] (2020) | 16 × 16 | 566 | 42 | 587 | 3.3 | 485 | 0.19 |
| Proposed Method | 14 × 14 | 302 | 46.5 | 1498.7 | 0.3 | 3227.6 | 0.38 | |
| 16 × 16 | 215.4 | 26.9 | 1210.5 | 0.3 | 2529.3 | 0.38 | ||
| Plane Surface | Ahsan [33] (2020) | 16 × 16 | 611 | 53 | 365.6 | 2.2 | 480 | 0.3 |
| Proposed Method | 14 × 14 | 227.8 | 33.5 | 1116 | 0.2 | 2472.6 | 0.48 | |
| 16 × 16 | 225.7 | 28.4 | 907 | 0.2 | 1942.1 | 0.48 | ||
| Cylinder | Ahsan [33] (2020) | 16 × 16 | 649 | 41.5 | 361 | 2.7 | 331.1 | 0.29 |
| Proposed Method | 14 × 14 | 209.3 | 16.6 | 544.2 | 0.1 | 1289.4 | 0.49 | |
| 16 × 16 | 198.5 | 15.3 | 466.4 | 0.1 | 1069.7 | 0.49 | ||
| Sculpture | Ahsan [33] (2020) | 16 × 16 | 644 | 38 | 271 | 2.7 | 318 | 0.5 |
| Proposed Method | 14 × 14 | 198.8 | 15.1 | 494.6 | 0.1 | 1163.3 | 0.5 | |
| 16 × 16 | 200.6 | 13.8 | 390.6 | 0.1 | 897.5 | 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elahi, A.; Zhu, Q.; Lu, J.; Hammad, Z.; Bilal, M.; Li, Y. Single-Shot, Pixel-Encoded Strip Patterns for High-Resolution 3D Measurement. Photonics 2023, 10, 1212. https://doi.org/10.3390/photonics10111212
Elahi A, Zhu Q, Lu J, Hammad Z, Bilal M, Li Y. Single-Shot, Pixel-Encoded Strip Patterns for High-Resolution 3D Measurement. Photonics. 2023; 10(11):1212. https://doi.org/10.3390/photonics10111212
Chicago/Turabian StyleElahi, Ahsan, Qidan Zhu, Jun Lu, Zahid Hammad, Muhammad Bilal, and Yong Li. 2023. "Single-Shot, Pixel-Encoded Strip Patterns for High-Resolution 3D Measurement" Photonics 10, no. 11: 1212. https://doi.org/10.3390/photonics10111212
APA StyleElahi, A., Zhu, Q., Lu, J., Hammad, Z., Bilal, M., & Li, Y. (2023). Single-Shot, Pixel-Encoded Strip Patterns for High-Resolution 3D Measurement. Photonics, 10(11), 1212. https://doi.org/10.3390/photonics10111212