Tensor-Train Decomposition-Based Hybrid Beamforming for Millimeter-Wave Massive Multiple-Input Multiple-Output/Free-Space Optics in Unmanned Aerial Vehicles with Reconfigurable Intelligent Surface Networks

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
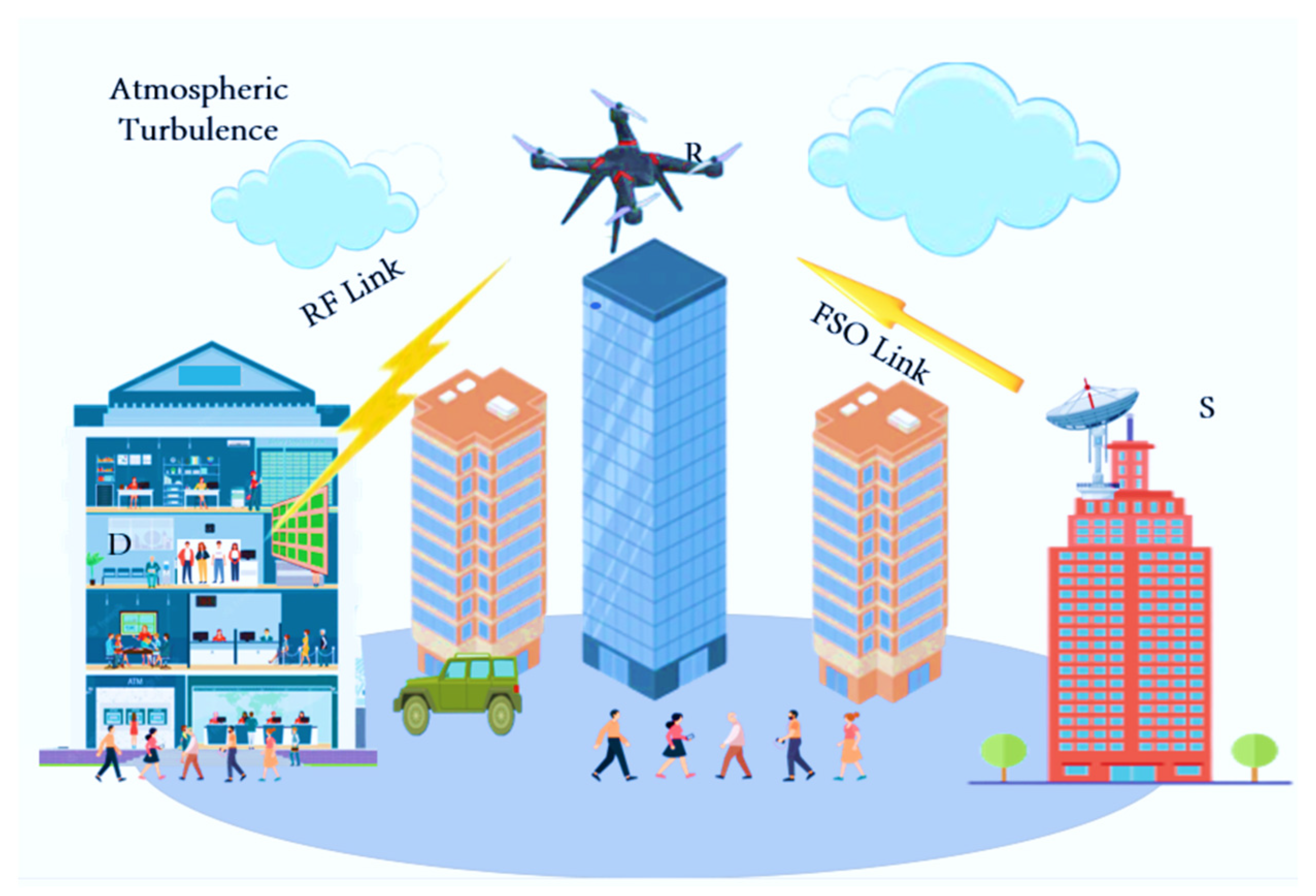
2. System Model
2.1. FSO System Model
2.2. DF Transmission Protocol
2.3. Mathematical Modeling of the PE Tracking System
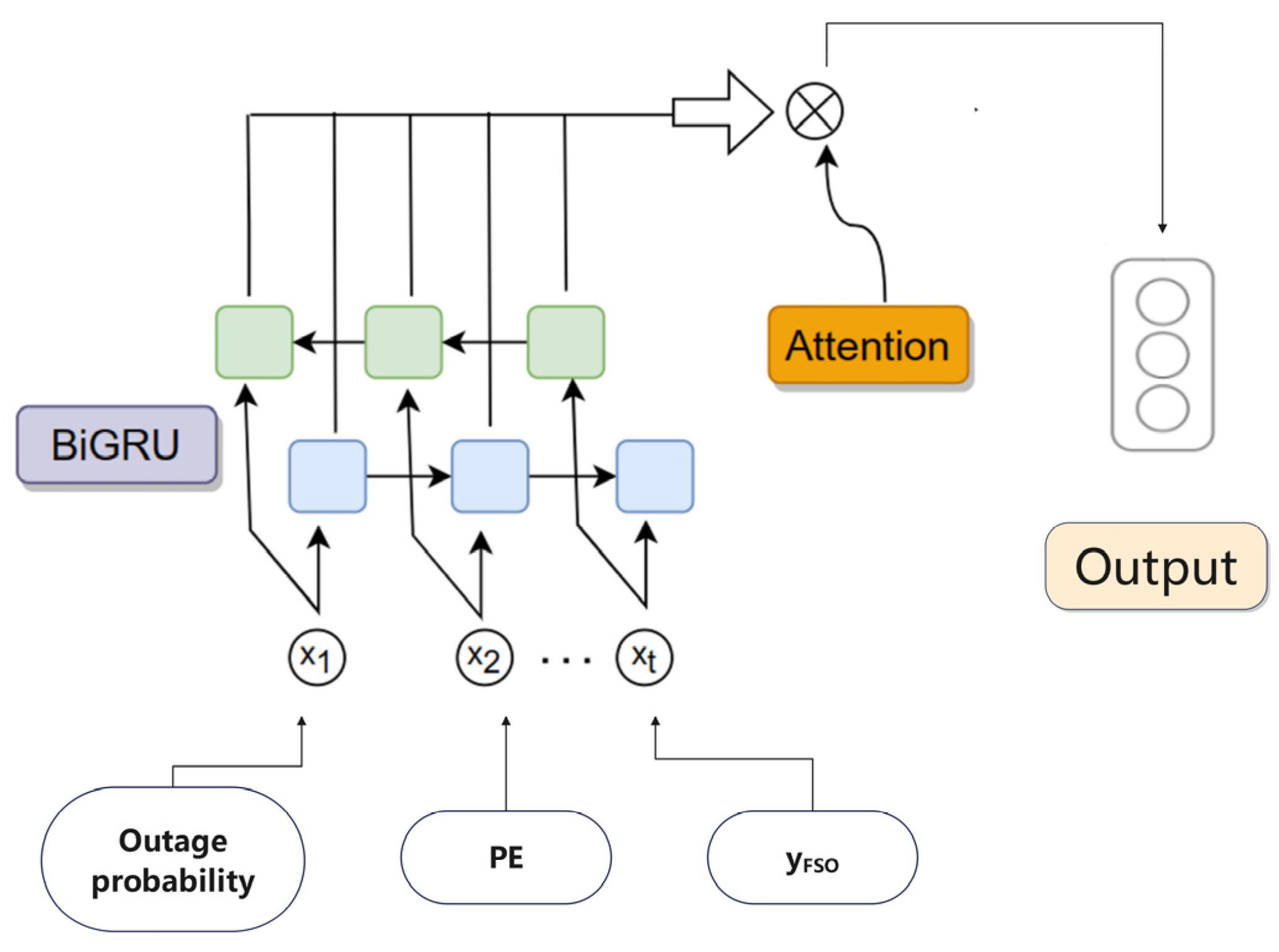
2.4. Estimation of FSO PE with BIGRU-Attention Model
2.4.1. Estimating FSO-PE Using BiGRU-Attention Model
2.4.2. BiGRU-Attention Model Training and Structure
- Training data
- b.
- Model structure
- c.
- Training process
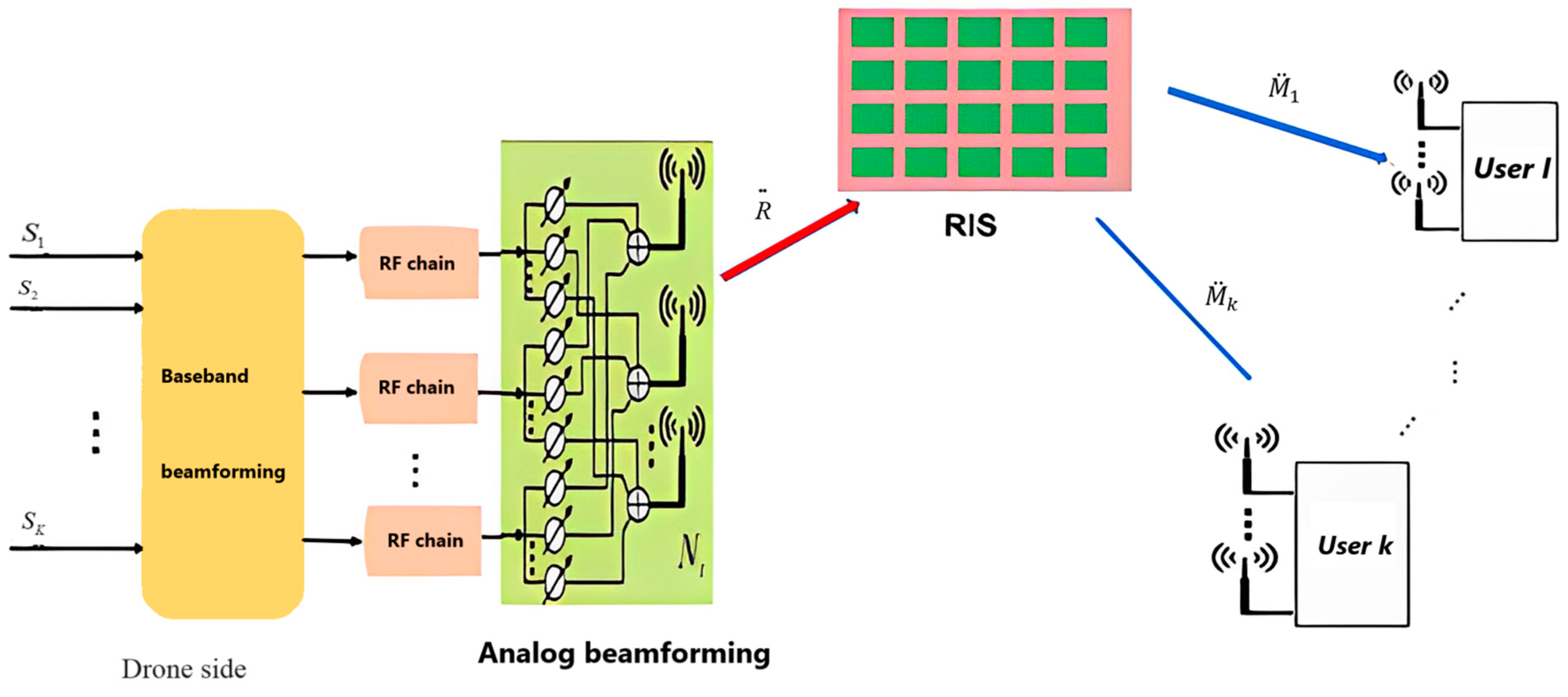
2.5. Multi-User UAV Communication Channel Model with RIS
3. Power Fading Factor and Doppler Shift estimation for Fast Fading Channels Based on Tensor-Train Decomposition
3.1. Tensor-Train Decomposition
3.2. Estimation of Power Fading Factor and Doppler Shift for Fast-Fading Channels Using Tensor-Train Decomposition
4. Hybrid Beamforming and RIS Phase Shift Matrix Design
4.1. Hybrid Beamforming and RIS Phase Shift Matrix Design Based on Tensor-Train Decomposition
4.2. RIS Phase Shift Matrix Design
5. Low-Complexity Hybrid Beamforming
5.1. Hybrid Beamforming Based on Spectral Efficiency Maximization
5.2. Digital and Analog Beamforming Matrix Solutions
| Algorithm 1: Projection Approximation Subspace Algorithm. |
|
| Algorithm 2: Improved hybrid beamforming optimization algorithm based on Phase Extraction Alternating Minimization. |
|
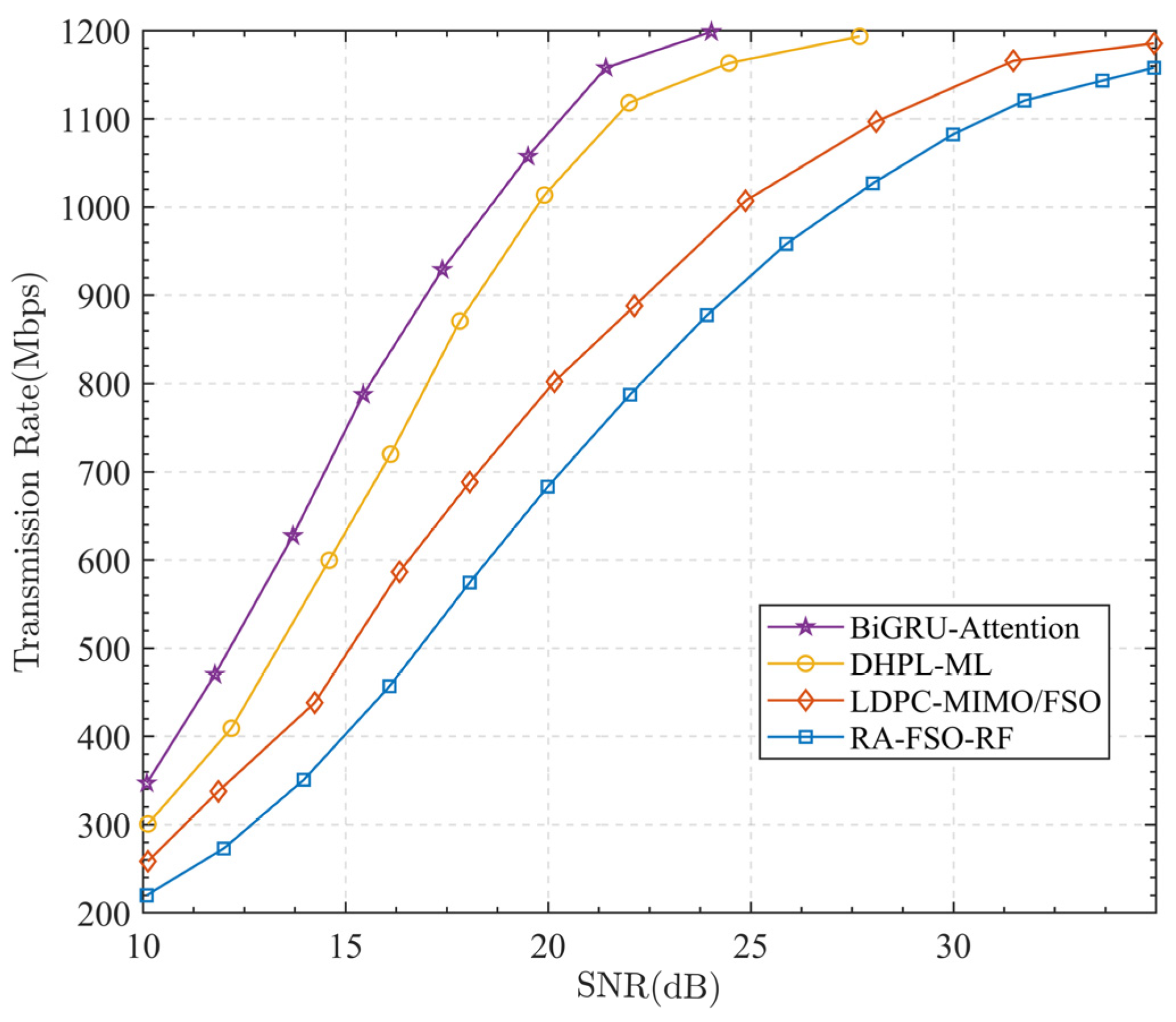
6. Simulation Results and Analysis
7. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khuwaja, A.A.; Chen, Y.; Zhao, N.; Alouini, M.-S.; Dobbins, P. A Survey of Channel Modeling for UAV Communications. IEEE Commun. Surv. Tutor. 2018, 20, 2804–2821. [Google Scholar] [CrossRef]
- Zhou, F.; Hu, R.Q.; Li, Z.; Wang, Y. Mobile Edge Computing in Unmanned Aerial Vehicle Networks. IEEE Wirel. Commun. 2020, 27, 140–146. [Google Scholar] [CrossRef]
- Cao, X.; Xu, J.; Zhang, R. Mobile Edge Computing for Cellular-Connected UAV: Computation Offloading and Trajectory Optimization. In Proceedings of the 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Kalamata, Greece, 25–28 June 2018; pp. 1–5. [Google Scholar]
- Li, B.; Fei, Z.; Zhang, Y. UAV Communications for 5G and Beyond: Recent Advances and Future Trends. IEEE Internet Things J. 2019, 6, 2241–2263. [Google Scholar] [CrossRef]
- Nguyen, T.V.; Le, H.D.; Dang, N.T.; Pham, A.T. On the Design of Rate Adaptation for Relay-Assisted Satellite Hybrid FSO/RF Systems. IEEE Photonics J. 2022, 14, 1–11. [Google Scholar] [CrossRef]
- Safari, M.; Uysal, M. Relay-Assisted Free-Space Optical Communication. In Conference Record of the Forty-First Asilomar Conference on Signals, Systems and Computers; IEEE: Piscataway, NJ, USA, 2007; pp. 1891–1895. [Google Scholar]
- Anandkumar, D.; Sangeetha, R.G. Performance Esxvaluation of LDPC-Coded Power Series Based Málaga (Ḿ) Distributed MIMO/FSO Link with M-QAM and Pointing Error. IEEE Access 2022, 10, 62037–62055. [Google Scholar] [CrossRef]
- Zhou, X.; Tian, X.; Tong, L.; Wang, Y. Manifold Learning Inspired Dynamic Hybrid Precoding with Antenna Partitioning Algorithm for Dual-Hop Hybrid FSO-RF Systems. IEEE Access 2022, 10, 133385–133401. [Google Scholar] [CrossRef]
- Jaiswal, A.; Abaza, M.; Bhatnagar, M.R.; Jain, V.K. An Investigation of Performance and Diversity Property of Optical Space Shift Keying-Based FSO-MIMO System. IEEE Trans. Commun. 2018, 66, 4028–4042. [Google Scholar] [CrossRef]
- AnandKumar, D.; Sangeetha, R.G. Performance Analysis of Power Series based MIMO/FSO Link with Pointing Errors and Atmospheric Turbulence. In Proceedings of the International Conference on Communication Systems & Networks (COMSNETS), Bangalore, India, 5–9 January 2021; pp. 78–81. [Google Scholar]
- Chen, J.; Yang, L.; Wang, W.; Yang, H.-C.; Liu, Y.; Hasna, M.O.; Alouini, M.-S. A Novel Energy Harvesting Scheme for Mixed FSO-RF Relaying Systems. IEEE Trans. Veh. Technol. 2019, 68, 8259–8263. [Google Scholar] [CrossRef]
- Ansari, I.S.; Yilmaz, F.; Alouini, M.S. Performance Analysis of FSO Links over Unified Gamma-Gamma Turbulence Channels. In Proceedings of the IEEE 81st Vehicular Technology Conference (VTC Spring), Glasgow, UK, 11–14 May 2015; pp. 1–5. [Google Scholar]
- Tokgoz, S.C.; Althunibat, S.; Yarkan, S.; Qaraqe, K.A. Physical Layer Security of Hybrid FSO-mm-Wave Communications in Presence of Correlated Wiretap Channels. In Proceedings of the IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021; pp. 1–7. [Google Scholar]
- Sun, Q.; Zhang, Z.; Zhang, Y.; López-Benítez, M.; Zhang, J. Performance Analysis of Dual-Hop Wireless Systems Over Mixed FSO/RF Fading Channel. IEEE Access 2021, 9, 85529–85542. [Google Scholar] [CrossRef]
- Xu, Z.; Xu, G.; Zheng, Z. BER and Channel Capacity Performance of an FSO Communication System over Atmospheric Turbulence with Different Types of Noise. Sensors 2021, 21, 3454. [Google Scholar] [CrossRef]
- Zhou, L.; Yang, Z.; Zhou, S.; Zhang, W. Coverage Probability Analysis of UAV Cellular Networks in Urban Environments. In Proceedings of the IEEE International Conference on Communications Workshops (ICC Workshops), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Zhou, Z.; Pan, C.; Ren, H.; Wang, K.; Elkashlan, M.; Renzo, M.D. Stochastic Learning-Based Robust Beamforming Design for RIS-Aided Millimeter-Wave Systems in the Presence of Random Blockages. IEEE Trans. Veh. Technol. 2021, 70, 1057–1061. [Google Scholar] [CrossRef]
- Yu, H.; Tuan, H.D.; Dutkiewicz, E.; Poor, H.V.; Hanzo, L. Regularized Zero-Forcing Aided Hybrid Beamforming for Millimeter-Wave Multiuser MIMO Systems. IEEE Trans. Wirel. Commun. 2023, 22, 3280–3295. [Google Scholar] [CrossRef]
- Zhou, R.; Zhang, C.; Zhang, G. Generalized Space-Time Adaptive Monopulse Angle Estimation Approach. In Proceedings of the International Conference on Control, Automation and Information Sciences, Chengdu, China, 23–26 October 2019; pp. 1–5. [Google Scholar]
- Wang, Z.; Li, Y.; Wang, C.; Ouyang, D.; Huang, Y. A-OMP: An Adaptive OMP Algorithm for Underwater Acoustic OFDM Channel Estimation. IEEE Wirel. Commun. Lett. 2021, 10, 1761–1765. [Google Scholar] [CrossRef]
- Wu, F.Y.; Yang, K.; Tian, T.; Huang, C.; Zhu, Y.; Tong, F. Estimation of Doubly Spread Underwater Acoustic Channel via Gram-Schmidt Matching Pursuit. In Proceedings of the OCEANS, Marseille, France, 17–20 June 2019; pp. 1–5. [Google Scholar]
- Liao, A.; Gao, Z.; Wu, Y.; Wang, H.; Alouini, M.S. 2D Unitary ESPRIT Based Super-Resolution Channel Estimation for Millimeter-Wave Massive MIMO with Hybrid Precoding. IEEE Access 2017, 5, 24747–24757. [Google Scholar] [CrossRef]
- Li, S.; Chai, Y.; Guo, M.; Liu, Y. Research on Detection Method of UAV Based on micro-Doppler Effect. In Proceedings of the 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 3118–3122. [Google Scholar]
- Beom-Seok, O.; Guo, X.; Wan, F.Y. MicroDoppler Mini-UAV Classification Using Empirical-Mode Decomposition Features. IEEE Geosocience Remote Sens. Lett. 2018, 15, 227–231. [Google Scholar]
- Zhang, J.; Zeng, Y.; Zhang, R. Multi-Antenna UAV Data Harvesting: Joint Trajectory and Communication Optimization. J. Commun. Inf. Netw. 2020, 5, 86–99. [Google Scholar] [CrossRef]
- Chauhan, A.; Sharma, S.E.; Budhiraja, R. Hybrid Block Diagonalization for Massive MIMO Two-Way Half-Duplex AF Hybrid Relay. In Proceedings of the International Conference on Signal Processing and Communications (SPCOM), Bangalore, India, 16–19 July 2018; pp. 367–371. [Google Scholar]
- Sharma, N.; Gautam, S. Optimizing RIS-assisted Wireless Communication Systems with Non-Linear Energy Harvesting. In Proceedings of the 5th International Conference on Energy, Power and Environment: Towards Flexible Green Energy Technologies (ICEPE), Shillong, India, 15–17 June 2023; pp. 1–5. [Google Scholar]
- Feng, K.; Chen, Y.; Han, Y.; Li, X.; Jin, S. Passive Beamforming Design for Reconfigurable Intelligent Surface-aided OFDM: A Fractional Programming Based Approach. In Proceedings of the IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–6. [Google Scholar]
- He, Y.; Cai, Y.; Mao, H.; Yu, G. RIS-Assisted Communication Radar Coexistence: Joint Beamforming Design and Analysis. IEEE J. Sel. Areas Commun. 2022, 40, 2131–2145. [Google Scholar] [CrossRef]
- Di Renzo, M.; Zappone, A.; Debbah, M.; Alouini, M.S.; Yuen, C.; De Rosny, J.; Tretyakov, S. Smart Radio Environments Empowered by Reconfigurable Intelligent Surfaces: How It Works, State of Research, and The Road Ahead. IEEE J. Sel. Areas Commun. 2020, 38, 2450–2525. [Google Scholar] [CrossRef]
- Jiang, W.; Chen, B.; Zhao, J.; Xiong, Z.; Ding, Z. Joint Active and Passive Beamforming Design for the IRS-Assisted MIMOME-OFDM Secure Communications. IEEE Trans. Veh. Technol. 2021, 70, 10369–10381. [Google Scholar] [CrossRef]
- Long, H.; Chen, M.; Yang, Z.; Li, Z.; Wang, B.; Yun, X.; Shikh-Bahaei, M. Joint Trajectory and Passive Beamforming Design for Secure UAV Networks with RIS. In Proceedings of the 2020 IEEE Globecom Work-shops (GC Wkshps), Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar]
- Kim, T.; Choe, Y. Fast Circulant Tensor Power Method for High-Order Principal Component Analysis. IEEE Access 2021, 9, 62478–62492. [Google Scholar] [CrossRef]
- Yu, X.; Shen, J.C.; Zhang, J.; Letaief, K.B. Alternating minimization algorithms for hybrid precoding in millimeter wave MIMO systems. IEEE J. Sel. Top. Signal Process. 2016, 10, 485–500. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.; Feng, P.; Li, J.; Chen, J.; Wang, Y. Tensor-Train Decomposition-Based Hybrid Beamforming for Millimeter-Wave Massive Multiple-Input Multiple-Output/Free-Space Optics in Unmanned Aerial Vehicles with Reconfigurable Intelligent Surface Networks. Photonics 2023, 10, 1183. https://doi.org/10.3390/photonics10111183
Zhou X, Feng P, Li J, Chen J, Wang Y. Tensor-Train Decomposition-Based Hybrid Beamforming for Millimeter-Wave Massive Multiple-Input Multiple-Output/Free-Space Optics in Unmanned Aerial Vehicles with Reconfigurable Intelligent Surface Networks. Photonics. 2023; 10(11):1183. https://doi.org/10.3390/photonics10111183
Chicago/Turabian StyleZhou, Xiaoping, Pengyan Feng, Jiehui Li, Jiajia Chen, and Yang Wang. 2023. "Tensor-Train Decomposition-Based Hybrid Beamforming for Millimeter-Wave Massive Multiple-Input Multiple-Output/Free-Space Optics in Unmanned Aerial Vehicles with Reconfigurable Intelligent Surface Networks" Photonics 10, no. 11: 1183. https://doi.org/10.3390/photonics10111183
APA StyleZhou, X., Feng, P., Li, J., Chen, J., & Wang, Y. (2023). Tensor-Train Decomposition-Based Hybrid Beamforming for Millimeter-Wave Massive Multiple-Input Multiple-Output/Free-Space Optics in Unmanned Aerial Vehicles with Reconfigurable Intelligent Surface Networks. Photonics, 10(11), 1183. https://doi.org/10.3390/photonics10111183