1. Introduction
With the prosperity and development of China’s economy and society, the number and length of tunnel constructions in China have rapidly increased in recent years, with railway tunnels becoming an important part of the transportation infrastructure. By the end of 2020, the operating mileage of railways in China reached 145,000 km, with a total of 16,798 railway tunnels in operation, spanning approximately 19,630 km, including 209 special-length railway tunnels with a total length of 2811 km. Tunnel safety has become particularly important, as the condition of tunnels directly affects railway safety and transport efficiency. Due to the different construction eras, materials, and structures, Itunnels have various problems. Tunnel lining cracks are among the most common tunnel problems; when such cracks extend to a certain degree, they inevitably change the stress state, increasing the probability of structural damage and potentially causing further problems, such as water leakages. Tunnel lining cracks and tunnel water leakages make up about 30% and 18%, respectively, of tunnel problems. Preventing and treating tunnel lining cracks, which requires the timely, accurate, and rapid detection of relevant crack data, is key to ensuring tunnel safety. However, tunnel cracks often have a similar color to the background structure, making them difficult to identify. Crack shapes are also varied and irregular, making recording and describing three-dimensional information about them complex.
Currently, non-contact and non-destructive detection techniques for tunnel lining cracks mainly include artificial detection, laser scanning-based detection, and camera-based detection [
1,
2,
3,
4]. The artificial detection method [
1,
2,
3,
4] has long detection times, a low efficiency, and high cost, while also yielding unreliable results. It also suffers from the inability to store the obtained data in digital archives and the inability to accurately express and record the morphology and nature of the observed cracks. The laser scanning-based detection method [
1,
2,
3,
4] scans the surface of the tunnel lining with a laser, calculates the three-dimensional coordinates of each point on the object surface based on the received signal, and obtains a tunnel surface image based on the positions of numerous points. This method requires a laser emission device and a receiving device, and the whole system is complex. Laser scanning requires the measurement of a large number of three-dimensional point coordinates and the reconstruction of the model based on point cloud data, resulting in the creation of large quantities of data and establishing a non-continuous three-dimensional surface. The camera-based detection method [
1,
2,
3,
4] mainly measures cracks using multiple linear sensors or array sensors. The image accuracy of linear sensors is influenced by the precision of the linear scanning motion; in comparison, array cameras offer better stability and intuitive imaging. This method has been applied in crack image acquisition systems for various inspection vehicles. To detect cracks in tunnel lining, this method mainly relies on two-dimensional image processing, using crack width, length, and area as the crack features, and obtaining feature values through image recognition. Due to the large amount of image data obtained with regard to tunnel lining surface and the complexity of tunnel environments, at present, the accuracy and efficiency of image recognition and crack identification fail to meet the practical requirements for high precision and rapid detection.
Currently, non-contact and non-destructive testing systems for tunnel lining cracks mainly include laser scanning detection systems, camera photography detection systems, and systems that contain laser scanning detection and camera photography detection [
5]. The tunnel disease detection vehicle developed by the Korean Institute of Nondestructive Testing [
6] uses CCD imaging technology for tunnel disease detection. It uses real-time photos and videos to generate static images, requires auxiliary lighting, and needs to identify cracks from a large number of images. The tunnel fast measurement system developed by China’s Wuhan University Zhuoyue Technology Co., Ltd., Wuhan, China [
6,
7] consists of four subsystems: a crack subsystem, a main control subsystem, an infrared subsystem, and a deformation subsystem. The crack subsystem includes 34 LED lighting systems and 32 high-speed area array cameras, achieving a full-coverage detection of tunnel cross-sections. The deformation subsystem includes two laser scanning radar systems with a crack width detection accuracy of 0.2 mm. The method, combining laser scanning detection and camera photography detection, uses laser scanning detection to obtain the three-dimensional contours of the lining and camera photography to detect lining cracks. In March 2014, Mitsubishi Electric Corporation of Japan launched the MIMM-R highway tunnel inspection vehicle [
7], which consists of twenty array cameras, three GPS systems, one IMU system, one odometer, three laser scanning radars, and three cameras. The inspection vehicle uses array cameras and LED lighting devices to capture tunnel lining problems and uses laser scanning radars to depict the 3D contour of the lining.
Although non-contact tunnel-inspection methods such as laser scanning technology and digital camera measurement and detection technology can basically meet the requirements of daily tunnel inspection and serve good auxiliary roles in tunnel maintenance work, they have the following drawbacks. (1) A complex data processing—the image quality is greatly affected by the tunnel environment, making this approach unsuitable for use in tunnels during the construction period. Additionally, the massive quantity of generated data cannot be quickly and efficiently processed, resulting in a low crack-recognition accuracy and efficiency. (2) The detection system is complex, and crack recognition and tunnel 3D profile acquisition require the separate implementation of different pieces of equipment.
A tunnel lining crack detection method based on polarization 3D imaging was proposed in [
8]. This approach uses a passive array polarization camera to obtain tunnel lining images and uses the polarization information of a single-frame image to reconstruct 3D information about the tunnel wall. Polarization 3D imaging is a passive, polarized imaging method. It utilizes the Fresnel equation to establish the function between the polarization characteristics of reflected light and the normal direction of the target surface to achieve 3D reconstructions. With this approach, 3D inversion can be achieved with a single image. As it does not require active illumination and is not limited by baseline length, it can better meet the application requirements of high-precision 3D information acquisition for crack detection in tunnel safety inspections.
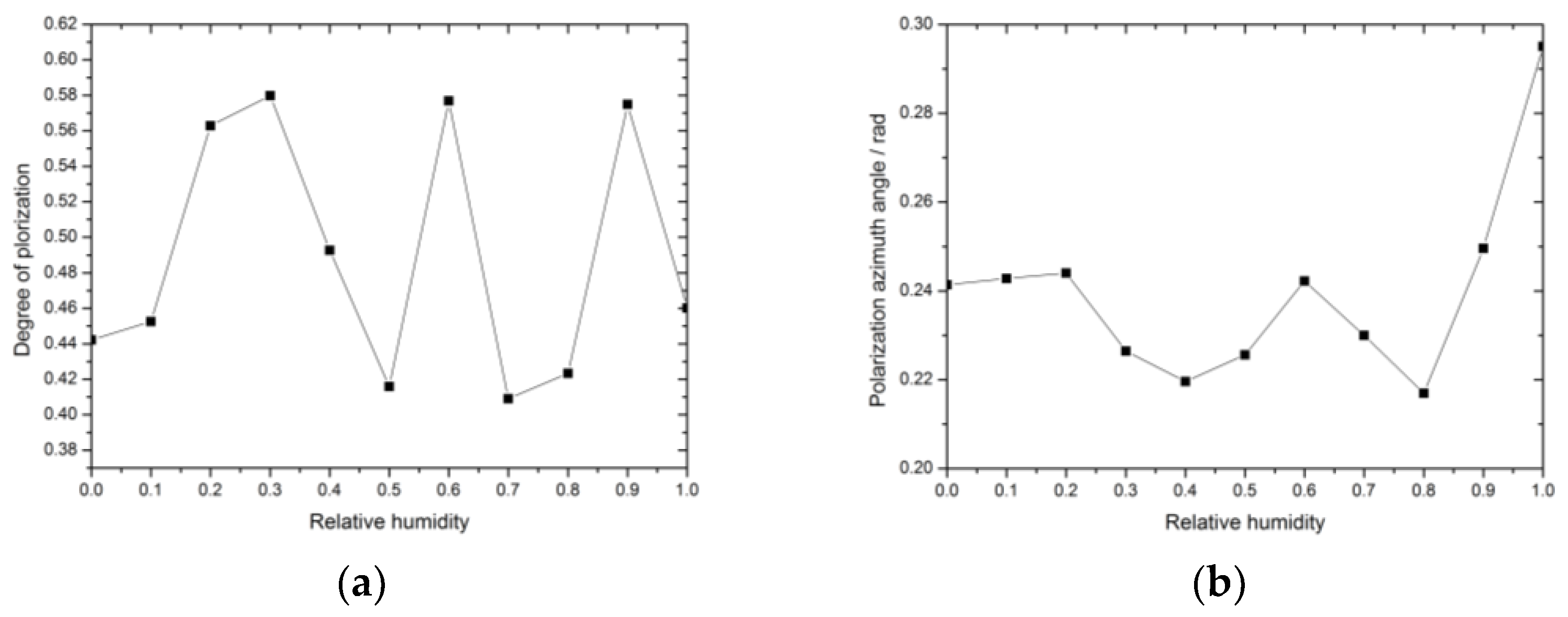
Through elevation information calculation, cracks in tunnels that have different depths from the background structure can be quickly extracted, and crack width, length, and other information can be output simultaneously. Polarization 3D imaging is particularly suitable for identifying cracks with similar colors to the background structure; however, it is also affected by complex environmental factors, such as humidity and dust in the tunnel during the construction period. Therefore, it is necessary to consider tunnel environmental factors when using existing polarization 3D imaging technology to improve detection accuracy. Compared with existing detection methods, polarization 3D imaging technology has the advantages of a low power consumption, simple and small equipment, simple data processing, a high crack-detection accuracy, and the potential to build 3D tunnel profiles and generate 3D data for the identification of problems.
Polarization 3D imaging can also detect tunnel lining leakages caused by cracks, lining peeling, and lining corrosion. Among tunnel diseases, tunnel lining cracks and tunnel leakages account for approximately 50%. Monitoring lining cracks is more difficult than monitoring other tunnel diseases, so as long as tunnel cracks can be detected, other tunnel diseases can also be detected.
2. Detection Principle of Tunnel Lining Cracks Based on Polarization 3D Imaging
Polarization 3D imaging utilizes the relationship between the normal of the surface of the object to be detected and the degree of polarization of the reflected light on the surface. According to the reflection and refraction laws of light waves, the propagation direction of light wave on the surface of an object is determined by the direction of incidence of light wave and the shape of the object’s surface. The Fresnel formula and definition of the degree of polarization show the relationship between the polarization of the reflected light on the surface of the object and the direction of incidence of light wave. Therefore, the information about the direction of incident light can be obtained from the polarization of the reflected light on the surface of the object. As shown in
Figure 1 [
9], the light beam is incident on the surface of the object to be detected and is reflected after incidence. According to the law of light reflection, the incident angle of the incident light is equal to the reflection angle, which is equal to the angle
in
Figure 1. The propagation direction of the reflected light is the z-axis, and the plane where the detector is located is the xoy plane. The projection of the normal of the surface of the object
at the point of the incident light on the xoy plane is
, and the angle between it and the x-axis is
.
is the linear polarization direction of the polarizer, and
is the azimuth angle of the normal of the exit surface with respect to the x-axis.
To better present the relationship between the surface normal
, incident angle
, and incident azimuth angle of the object
, the normal
in
Figure 1 is represented in polar coordinates as shown in
Figure 2. The incident angle
is the zenith angle of the normal
, and the incident azimuth angle
is the azimuth angle of the normal
.
From
Figure 2, it can be seen that the zenith angle
and azimuth angle
determine the surface normal
of the object, which is expressed as:
where
and
. Therefore, the target surface normal can be determined by the zenith angle and azimuth angle of the normal.
is the relationship between the surface height of the object and the Cartesian coordinates
.
is obtained by calculating the normal of the microfacets based on the polarization characteristics of the diffused reflection of the object surface in natural scenes [
10].
In practical applications, the Stokes vector, composed of Stokes parameters, is often used to represent the polarization state of the light wave. When the incident angle
is 0°, 45°, 90°, and 135°, respectively, the cameras can obtain the intensity
,
,
, and
of the object to be detected in four polarization directions.
represents the intensity of the horizontal polarization component.
represents the intensity of the vertical polarization component.
represents the intensity of the polarization component in the 45° direction.
represents the intensity of the polarization component in the 135° direction.
and
are the intensities of the right-handed and left-handed circular polarization components, respectively. The Stokes parameters
S0,
S1,
S2, and
S3 are defined as:
According to the definition of the degree of polarization, the degree of polarization P is given by:
where
is related to circular polarization and can be ignored when considering mainly linear polarized light as complete polarized light. Therefore, the degree of polarization can be represented by Stokes parameters.
The zenith angle of polarized light from the object is:
and the azimuth angle is:
By substituting the zenith and azimuth angles of the polarized light into Equations (1) and (2), respectively, the normal can be obtained, and the surface function of the object can be reconstructed.
3. Tunnel Lining Crack Detection Scheme
3.1. Detection Scheme
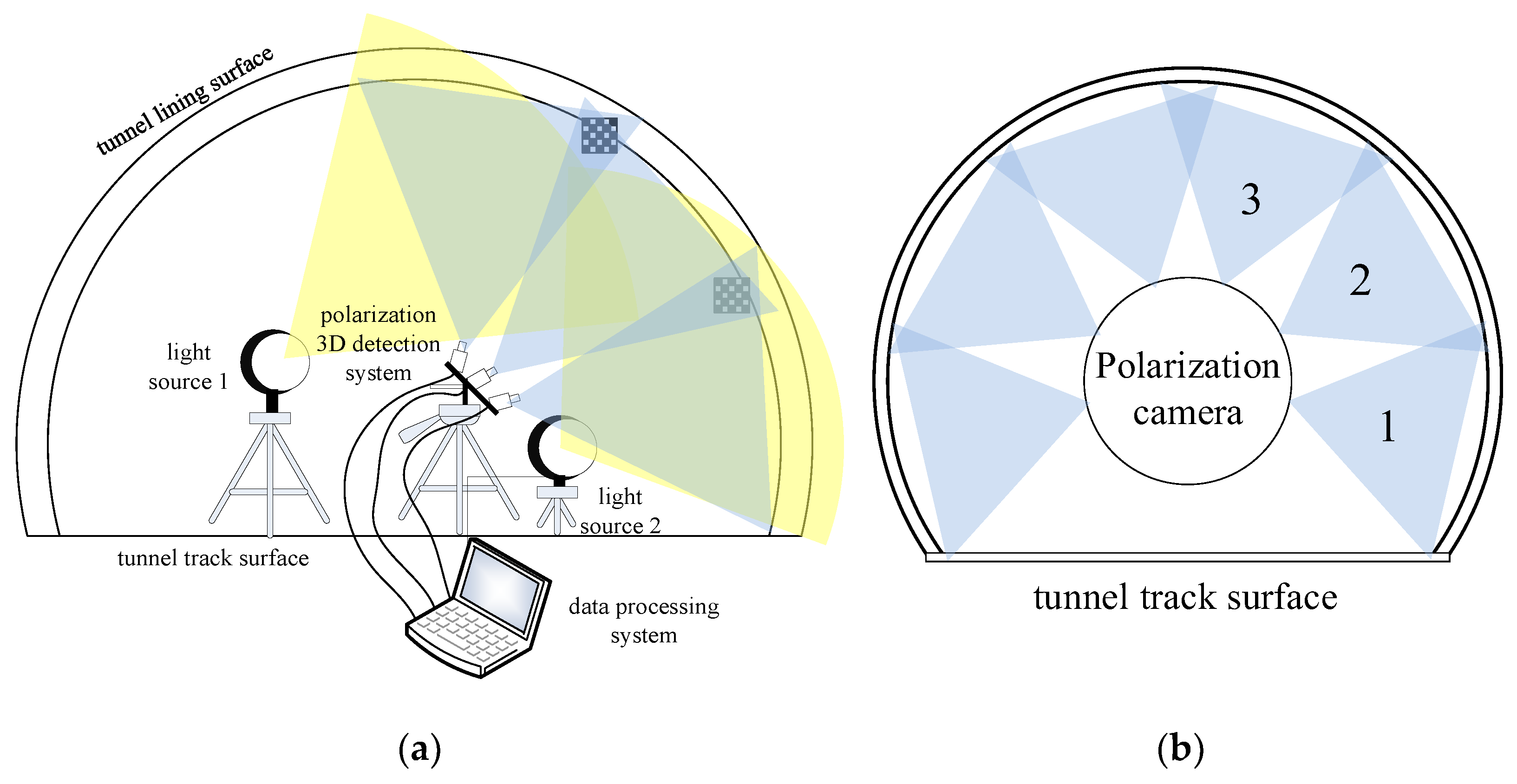
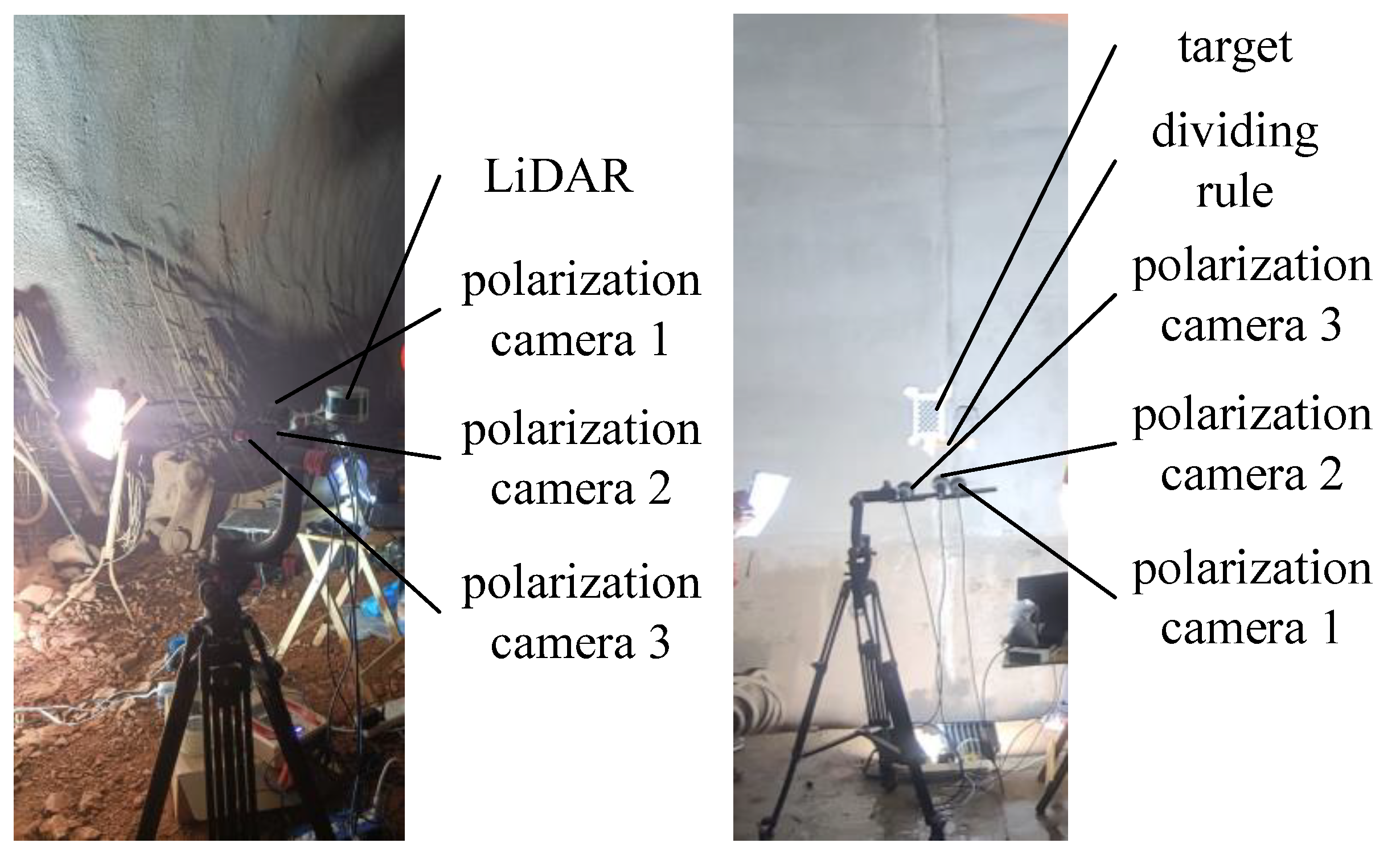
Based on polarization 3D imaging, the tunnel lining crack detection scheme is shown in
Figure 3a. The detection system consists of three area-array polarization cameras, two lighting sources and one data processing system. Three area-array polarization cameras are used to simultaneously obtain images of approximately 50% of the entire tunnel section. As shown in
Figure 3b, six area-array polarization cameras are required to obtain images of the entire tunnel section simultaneously [
11,
12]. During the experimental stage, the detection system used three area-array polarization cameras to verify the technical ability. Based on the result of crack detection for approximately 50% of the entire tunnel section, the six area-array polarization cameras can be used in the future to expand the detection to the entire tunnel section at the same time.
Two white light sources were used during the tunnel crack detection test, which was carried out during the construction period, as lighting conditions were poor in the tunnel. Light sources will not be necessary in the tunnel during an operation period with good internal lighting conditions. The lights from two white light sources were non-polarized, which had a negligible impact on the accuracy of polarization 3D inversion. A data processing system was used to process the polarized images obtained by the three area-array polarization cameras in real-time. The system calculated the 3D information of the tunnel lining cracks and output information such as the width, length, and depth of the cracks.
A test chart was arranged at the overlap of the fields of view from three area-array polarization cameras, which was used to calibrate the stitching parameters of the three cameras’ fields of view and improve the stitching precision. When the crack test in the tunnel during the operation period, the ground track, detection system, and tunnel wall are all at a constant relative distance, only one stitching calibration is needed. Using the stitching calibration results, the images obtained by three area-array polarization cameras can be polarization 3D inverted, and the 3D images can be stitched together to obtain the 3D contour information and 3D crack information of the entire tunnel section.
3.2. Instrumentation and Equipment
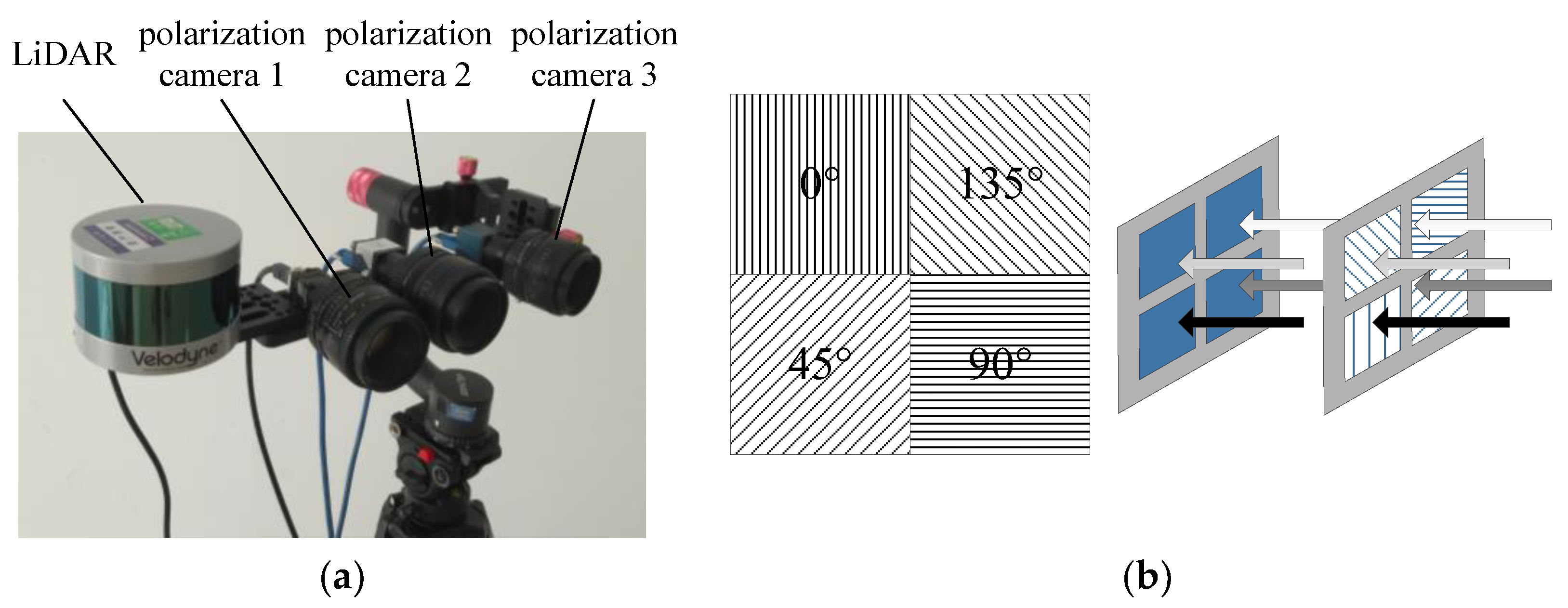
Three area-array polarization cameras are shown in
Figure 4. Three area-array polarization cameras, with a pixel resolution of 2.4 K × 2 K, were arranged at a certain angle in the same horizontal plane to ensure a 5–10% overlap of the fields of view. They were used to simultaneously capture images of 50% of the tunnel section. As technology advances, a larger pixel resolution of the polarization cameras can effectively reduce the number of cameras to obtain images of the entire tunnel section. Three area-array polarization cameras were fixed on a connecting plate, which was attached to the instrument bracket. The instrument bracket can be adjusted to change the imaging angle of the cameras. The laser radar system can obtain a 3D point cloud image of the tunnel wall for the comparison with the 3D imaging results obtained by the polarization cameras. Additionally, a caliper was used to accurately measure the width of cracks in the tunnel lining at a certain position, which was used to compare with the width obtained by the polarization cameras at the same position.
The polarization camera is a focal plane polarization camera, and micro-polarized optical elements are attached directly to the focal plane array. There are four polarization directions on four adjacent pixels, 0°, 45°, 90°, and 135°. Three Stokes vectors can be obtained simultaneously, and the polarization information of incident light can be obtained in real-time.
3.3. Crack Detection Method and Process
There are many studies on crack detection based on image processing. The general method is as follows: (1) image pre-processing to enhance the contrast and clarity of the image [
13,
14]; (2) image enhancement [
15], edge detection [
16], highlighting the target area; (3) identifying cracks based on image features such as gray level, texture, and morphology [
17,
18]; and (4) providing feature information of the cracks. Crack recognition algorithms based on threshold segmentation, morphology, and graph search methods have been developed [
19,
20,
21]. These methods are used to highlight crack information in two-dimensional images through processing for identification, but which cannot obtain the depth information of the cracks.
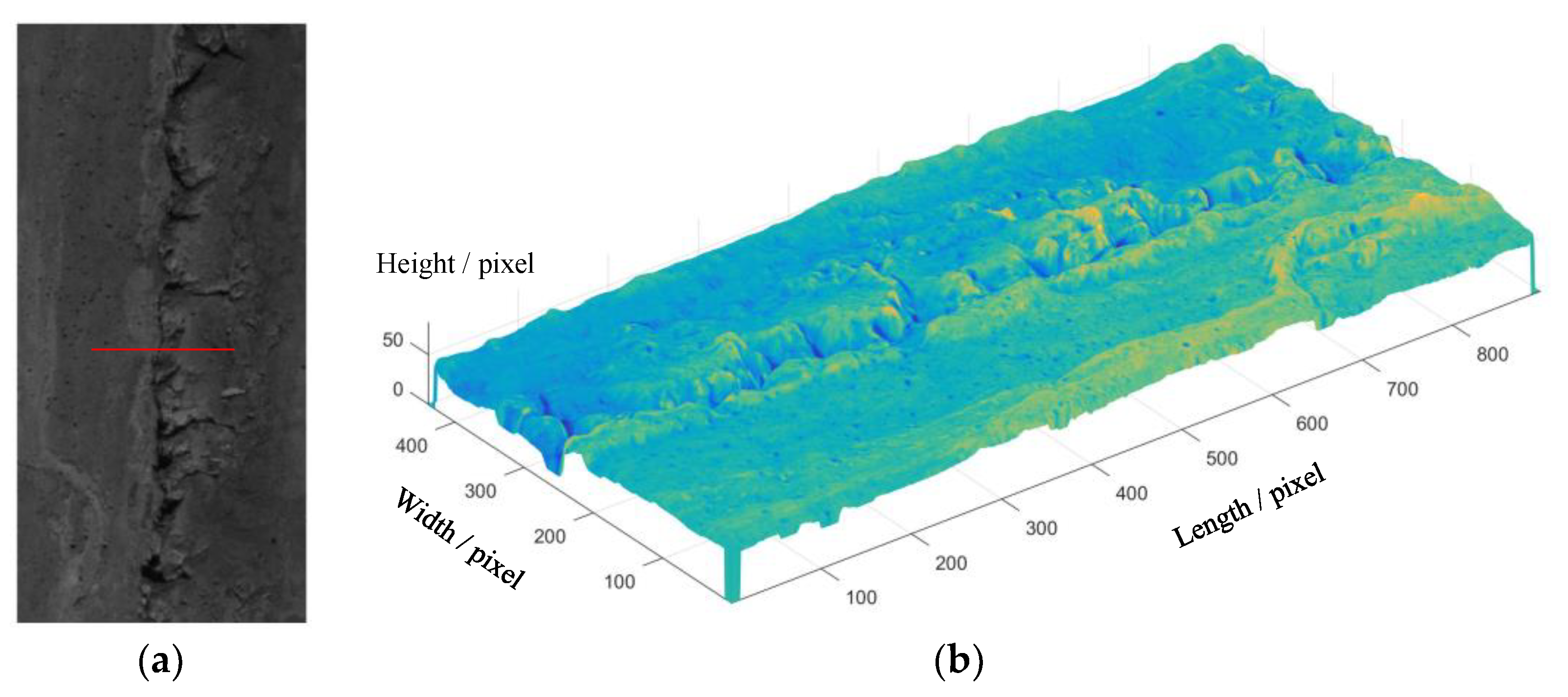
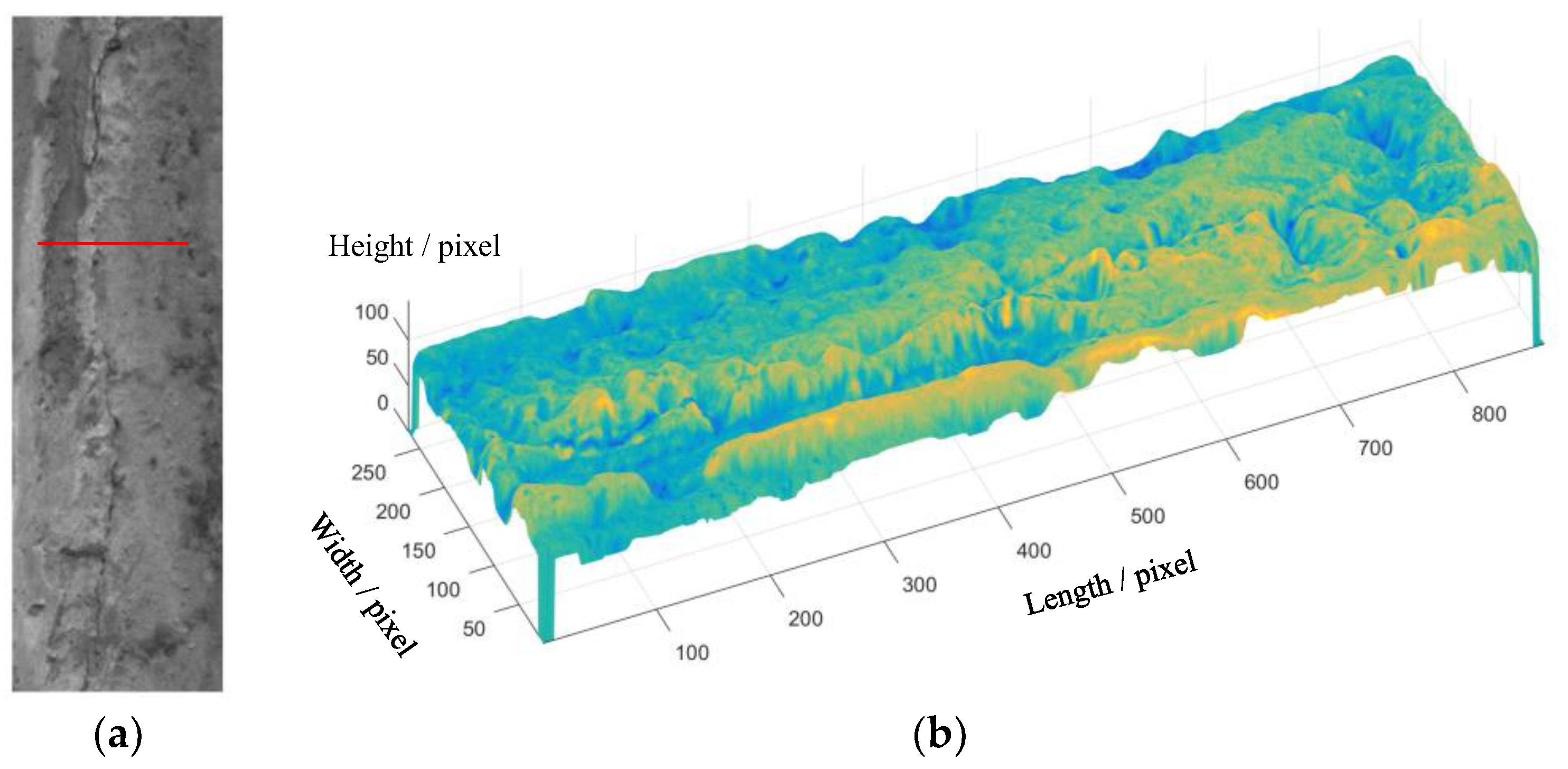
In our work, the polarization information in the tunnel lining images was used to calculate the three-dimensional information of the tunnel lining, including the depth information of the cracks. The background wall of the tunnel lining was a continuous plane, its elevation was continuous. By setting the elevation threshold, the cracks can be separated from the background wall, and the crack information can be obtained quickly and directly. The edge extraction method can be used to directly obtain feature parameters such as crack length, width, depth, position, direction, and distribution. At the same time, by using the three-dimensional image of the entire tunnel lining from multiple polarization cameras, the three-dimensional profile of the tunnel can be obtained. Compared with the design profile of the tunnel, the quantitative information of the over-excavation and under-excavation during the construction period can be obtained. This part of the work will be described in detail in subsequent papers.
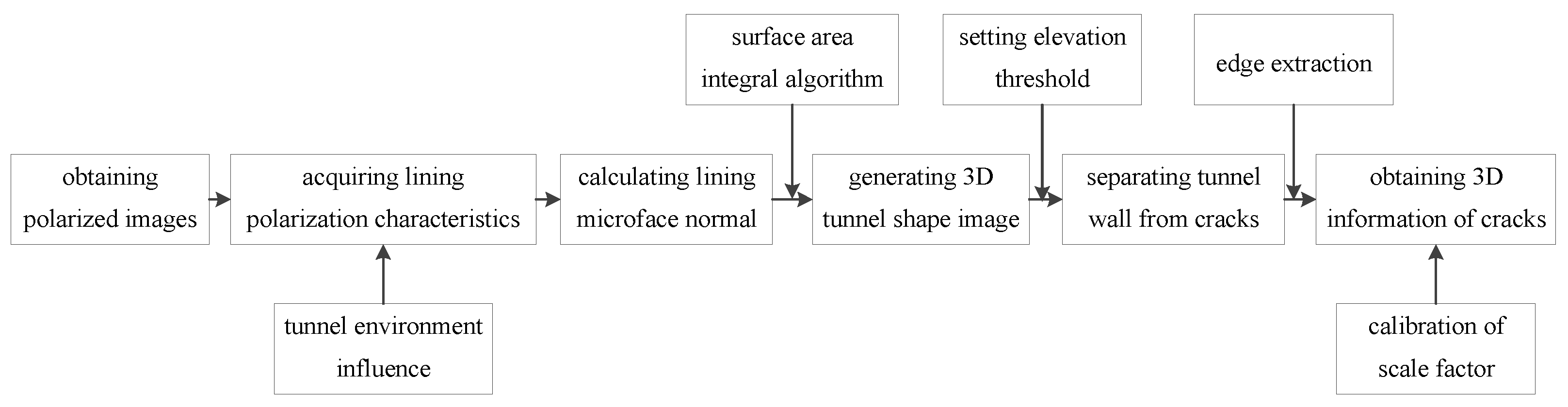
The method and process for detecting cracks in tunnel lining based on polarization 3D imaging are shown in
Figure 5. Firstly, polarization cameras were used to obtain the polarization image of the tunnel lining, and the polarization characteristics of the tunnel lining were solved by the Stokes formula. Combined with the analysis results of the polarization light affecting the observed surface in the tunnel environment, the normal of the micro-surface elements was calculated using the method described in the first section. Secondly, the surface integral algorithm was used to obtain the 3D image of the tunnel lining and the 3D shape of the cracks. The elevation threshold was set to separate the background wall from the cracks, and the edge detection algorithm was used to extract the crack edges and obtain information such as crack width, depth, length, and position. By using scale factor calibration, the relative information was converted into absolute information, and the accurate 3D information of the cracks was output. The relevant details will be explained in detail in the following sections.
6. Conclusions
Based on the polarization 3D imaging technology for the detection of cracks in tunnel lining, passive area-array polarization cameras were used to obtain tunnel lining images, and the polarization information was used to reconstruct the 3D structure of the tunnel wall. This allowed for the quick extraction of cracks with different depths from the background structure of the tunnel, and for obtaining 3D information about the cracks. It can effectively compensate for the drawbacks of the laser scanning method, which has a high power consumption and produces discontinuous 3D point cloud images. It also effectively compensates for the drawbacks of the camera photography detection method, which has a complex crack detection process. Based on the principle of the polarization 3D detection of cracks in tunnel lining, our work designed a scheme to detect the tunnel cross-section using three array polarization cameras and developed a polarization 3D detection system. We established a crack detection method for tunnel lining based on the real environment conditions of the tunnel. A model for the influence of the tunnel environment on polarized light transmission was established to address the impact of polarization imaging in complex environments such as strong local light, high humidity, and dust during the construction period of tunnels. A quantitative analysis of the impact of a tunnel’s environment on polarization 3D imaging was conducted to obtain accurate information on tunnel lining crack detection and achieve high-precision detection. Tests were carried out in the tunnel during the construction period to detect wide cracks, narrow cracks, and artificial cracks. The crack width detection errors were 0.2 mm, 0.3 mm, and 0.3 mm, respectively. The crack length detection errors were 0.2 mm, 0.2 mm, and 0.3 mm, respectively, and the crack depth detection errors were the same as the width and length detection errors, which met the requirements of tunnel crack detection. Based on the principle of polarization 3D imaging, it can be inferred that the precision of the inverted crack depth is consistent with the precision of the crack width and length. In subsequent research, the precision of obtaining 3D data of tunnel cracks by polarization 3D imaging will be improved, and a 3D profile information on the tunnel section will be constructed.

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}