The Neural Network Revamping the Process’s Reliability in Deep Lean via Internet of Things


Abstract
1. Introduction
2. Main Objective
3. The “Define” Phase (DOE Setup and Test Procedures)
4. Measurement Phase (Device Description)
5. Analysis Phase
- Waste 1 (W1): W is the gradual response to a second-order system G(s) = 1/(20 S^(2 + 0.5 S + 1)) with a step of range 20, and the test occurrence was generated with a step of range 15.
- Waste 2 (W2): W is a step of range 3 for the training occurrence, and range 2 for the test occurrence.
- Normal operation (N0): all samples before the waste constituted the normal operation data.
| Hydraulic inner diameter of hose | Hose cross section area (m2) | ||
| Density of the fluid (kg/m3) | Kinematic viscosity (m2/s) | ||
| Velocity of the liquid (m/s) | Dynamic viscosity of paint liquid (N.s/m2) | ||
| Linear dimension (m) | y | The output prediction for deviation |
5.1. Experimental Results and Discussion
5.1.1. Eddy-Collapse Waste Shapes
Type 1—Wide-Spiral-Shaped Waste
Type 2.1. Flattened-Bubble Waste
Type 2.2. Bubble Axially Waste
5.2. Eddy Waste Analysis
6. Improvement Phase
6.1. Neural-Network Model (Deep-Lean Model)
- ▪ load Minitab_Input.mat
- ▪ whos
- ▪ figure
- ▪ plot(Distance(find(target==1),:)’,’b’)
- ▪ grid on, hold on
- ▪ plot(Distance(find(target>1),:)’,’r’)
- ▪ xabel(‘Time’)
- ▪ ylabel(‘Distance’)
- ▪ [pn,ps1] = mapstd(Distance’);
- ▪ FP.maxfrac = 0.05;
- ▪ [ptrans,ps2] = processpca(pn, FP);
- ▪ ps2
- ▪ Distance2 = ptrans’;
- ▪ whosDistance Distance2
- ▪ figure
- ▪ plot(distance2(:,1),distance2(:,2),’.’)%OK
- ▪ grid on, hold on
- ▪ plot(Distance2(find(target>1),1),Distance2…
- ▪ (find(target>1),2),’r.’) % NOT_OK xlabel(‘pca1’)
- ▪ xlabel(‘TypeI’)
- ▪ ylabel(‘TypeII’)
- ▪ legend(‘OK’,’NOT OK’,’location’,’nw’)
- ▪ target = double (target > 1);
- ▪ net = feedforwardnet([64]);
- ▪ net.divideParam.trainRatio = 0.70;
- ▪ net.divideParam.valRatio = 0.15;
- ▪ net.divideParam.testRatio = 0.15;
- ▪ [net,tr,Y,E] = train(net,distance2’,target’);
- ▪ threshold = 0.5;
- Y = double(Y > threshold)’;
- cc = 100*length(find(Y==target))/length(target);
- fprintf(‘Correct classifications: %.1f [%%]\n’, cc)
- figure(21)
- a = axis;
- xspan = a(1)-10 : .1 : a(2)+10;
- yspan = a(3)-10 : .1 : a(4)+10;
- [P1,P2] = meshgrid(xspan,yspan);
- pp = [P1(:) P2(:)]’;
- aa = sim(net,pp);
- aa = double(aa > threshold);
- ma = mesh(P1,P2,reshape(-aa,length(yspan),length(xspan))-4);
- mb = mesh(P1,P2,reshape( aa,length(yspan),length(xspan))-5);
- set(ma,’facecolor’,[.7 1.0 1],’linestyle’,’none’); set(mb,’facecolor’,[1 0.7 1],’linestyle’,’none’);view(2)
6.2. Pre-Processing of the Eddy Images
6.3. Preliminary Results of Eddy Waste with L/R = 12
7. Control Phase
- (1)
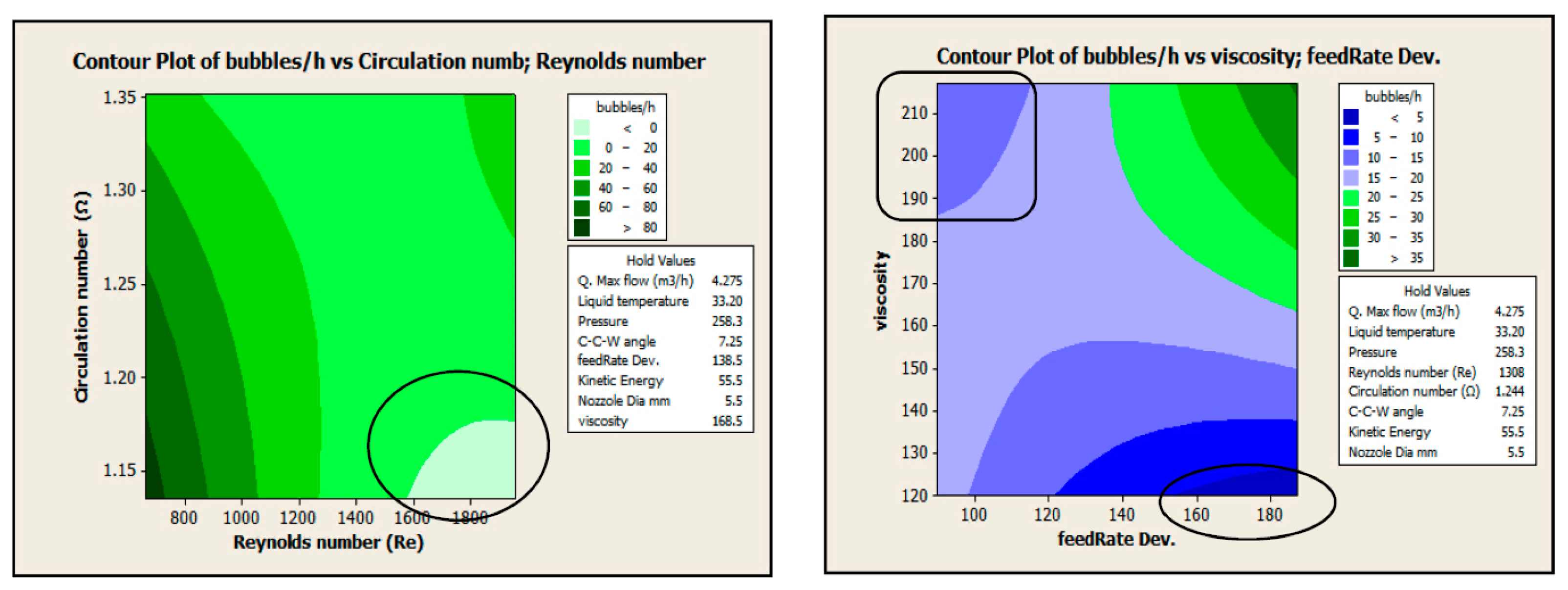
- The bubble waste movement directions were based on both the (Re) and Ω of the liquid flow. However, for some (Re) values, increasing Ω always led to pushing the bubbles downstream toward the destination point. In contrast, an increase in Ω led to a transformation to another of the waste shape types. Bubble collapse was also a general result when Re increased at a constant value of Ω.
- (2)
- The eddy creation wastes were smaller for the anti-clockwise flow direction under controlled conditions, especially in the vertical hose (L/R = 12). Therefore, to control the output of process performance, the recommendations of Figure 30 must be followed.
- (3)
- In state of Ω = 1.186, a small influence of the eddy waste was noted for the vertical hose with anti-clockwise flow direction and the vane set at approximately 12°.
- (4)
- On the other hand, in the clockwise flow direction case, a dead eddy of waste occurred at the destination in the vertical hose rather than that in horizontal hose at Ω =1.28, but the results changed when Ω was increased to 1.6, at which point the dead eddy waste occurred earlier in the horizontal hose than in the vertical hose.
- (5)
- In case of counter-clockwise flow direction, the dead eddy waste always occurred at the destination in the vertical hose rather than in the horizontal hose for all values of Ω, except when , where the dead eddy waste had a small effect.
- (6)
- The eddy moves slowly toward the downstream path at the anti-clockwise flow case for some of the optimal values for the influencing factors, whereas the circulation of Ω increases, whether for a cone or cylindrical orifice travel as illustrates in Figure 31 (Fitted value).
- (7)
- The reliability of the process increases with NN intervention, reducing the defective output by 92.8%, by reducing the number of defective bathtubs (i.e., outputs) from 70/week to 5/week as shown in Figure 31 (observation order).
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Liu, F.; Jang, H.; Kijowski, R.; Bradshaw, T.; McMillan, A.B. Deep learning MR imaging-based attenuation correction for PET/MR imaging. Radiology 2018, 286, 676–684. [Google Scholar] [CrossRef]
- Huang, G.; Liu, Z.; van der Maaten, L.; Weinberger, K.Q. Densely connected convolutional Networks. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Image Net Classification with Deep Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2012, 25. Available online: https://papers.nips.cc/paper/4824-imagenet-classification-with-deep-convolutional-neural-networks.pdf (accessed on 22 January 2018).
- Bastiaanssen, W.G.M.; Molden, D.J.; Makin, I.W. Remote sensing for irrigated agriculture: Examples from research and possible applications. Agric. Water Manag. 2000, 46, 137–155. [Google Scholar] [CrossRef]
- Gebbers, R.; Adamchuk, V.I. Precision agriculture and food security. Science 2010, 327, 828–831. [Google Scholar] [CrossRef]
- Félix, M.J.; Silva, S.; Santos, G.; Doiro, M.; Sa, J.C. Integrated Product and Processes Development in Design: A Case Study. In Proceedings of the 8th Manufacturing Engineering Society International Conference, Procedia Manufacturing. 2019, Volume 41, pp. 296–303. Available online: www.sciencedirect.com (accessed on 9 March 2020). [CrossRef]
- Rükmann, M.; Lorenz, M.; Gerbert, P.; Waldner, M.; Justus, J.; Engel, P.; Harnisch, M. Industry 4.0: The future of productivity and growth in manufacturing industries. Bost. Consult. Gr. 2015, 9, 54–89. [Google Scholar]
- Ringen, G.; Welo, T. The product devel. Learning process and its relation to performance indicators. Procedia Manuf. 2018, 26, 107–116. [Google Scholar] [CrossRef]
- Weber, R.H.; Weber, R. Internet of Things.12; Springer: New York, NY, USA, 2010. [Google Scholar]
- Hashem, I.A.T.; Yaqoob, I.; Anuar, N.B.; Mokhtar, S.; Gani, A.; Khan, S. The rise of ‘big data’ on cloud computing: Review and open research issues. Inf. Syst. 2015, 47, 98–115. [Google Scholar] [CrossRef]
- Chi, M.; Plaza, A.; Benediktsson, J.A.; Sun, Z.; Shen, J.; Zhu, Y. Big data for remote sensing: Challenges and opportunities. Proc. IEEE 2016, 104, 2207–2219. [Google Scholar] [CrossRef]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Disaster monitoring using unmanned aerial vehicles and deep learning. In Disaster Management for Resilience and Public Safety Workshop, Proceedings of EnviroInfo; Envirolnfo Conference: Luxembourg, 2017. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Gregor, M.; Kosturiak, J. Simulation: Strategic technique for the Factory’s future. Rev. Simul. 1997, 69, 291–305. [Google Scholar] [CrossRef]
- Diaz-Guti_errez, P.; Gilbert, S.J.; Arco, J.E.; Sobrado, A.; Ruz, M. Neural representation of current and intended task sets during sequential judgments on human faces. Neuroimage 2020, 204, 116219. [Google Scholar] [CrossRef] [PubMed]
- Stein, O.; Kempf, A. LES of the Sydney swirl flame series: A steady of vortex breakdown in isothermal and reacting flows. Proc. Combust. Inst. 2007, 31, 1755–1763. [Google Scholar] [CrossRef]
- Abed, A.; Farag, S. Control vortex Position in Vertical Tube to Reduce Spray Defects and Revamping Six-Sigma Image Verification Tool. Egypt. Int. J. Eng. Sci. Technol. 2014, 17, 178–185. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. arXiv 2015. Available online: https://arxiv.org/pdf/1502.03167.pdf (accessed on 22 June 2018).
- Leibovich, S. The structure of vortex breakdown. Ann. Rev. Fluid Mech. 1978, 10, 221–246. [Google Scholar] [CrossRef]
- Peckham, D.; Atkinsion, S. Preliminary Results of Low Speed Wind Tunnel Tests on a Gothic Wing of Aspect Ratio 1.0; ARC technical report C.P. No.508. Ministry of Aviation aeronautical research council current paper, No. 533.6.011.3: 533.691.-l3: 533.69.048.3: 532,527, Technical Note No. Aero. 2504; Her Majesty’s Stationery U.D.C.: London, UK, April 1957.
- Srigrarom, S.; Ridzwan, M. An experimental investigation of perturbations on vortex breakdown over delta wings. In Proceedings of the 16th Australasian Fluid Mechanics Conference, Crown Plaza, Gold Coast, Australia, 2–7 December 2007. [Google Scholar]
- Srigrarom, S.; Lewpiriyawong, N. Controlled eddy breakdown on modified. J. Visulization 2007, 10, 299–307. [Google Scholar] [CrossRef]
- Sharma, C.; Soundranayagam, S.; Mukund, S.; Mukund, T. Dependence of vortex breakdown on angular momentum parameter in draft hose flows. Curr. Sci. 1998, 75, 1355–1363. [Google Scholar]
- Cervants, M. Counter rotating runner cone in a Kaplan elbow draft hose for increased efficiency. In Proceedings of the 3rd IAHR International Meeting of the Works Group on Cavitation and Dynamic Problems in Hydraulic Machinery and Systems, Brno, Czech Republic, 14–16 October 2009. [Google Scholar]
- Tangermann, E.; Pfitzner, M. Evaluation of combustion models for combustion-induced vortex breakdown. J. Turbul. Taylor Fr. 2009, 10. [Google Scholar] [CrossRef]
- Aksel, M.; Kaya, M. A numerical simulation of the axisymmetric vortex breakdown in a hose. Appl. Math. Model. 1992, 16, 414–422. [Google Scholar] [CrossRef]
- Jochmann, P.; Sinigersky, A.; Hehel, M.; Schäfer, O.; Koch, R.; Bauer, H. Numerical simulation of a processing vortex breakdown. Int. J. Heat Fluid Flow 2006, 27, 192–203. [Google Scholar] [CrossRef]
- Ruith, R.; Chen, P.; Meiburg, E.; Maxworthy, T. Three-dimensional vortex breakdown in swirling jets and wakes: Direct numerical simulation. J. Fluid Mech. 2003, 486. [Google Scholar] [CrossRef]
- Sousa, P.J.; Barros, F.; Tavares, P.J. Displacement measurement and shape acquisition of an RC helicopter blade using Digital Image Correlation. Procedia Struct. Integr. 2017, 5, 1253–1259. [Google Scholar] [CrossRef]
- Park, J.; Yoon, S.; Kwon, T.-H.; Park, K. Assessment of speckle-pattern quality in digital image correlation based on gray intensity and speckle morphology. Opt. Lasers Eng. 2017, 91, 62–72. [Google Scholar] [CrossRef]
- Bermudo, C.; Martin-Béjar, S.; Trujillo, F.J.; Castillo, G.; Sevilla, L. Material Flow Analysis in Indentation Process by 3D Digital Image Correlation. In Proceedings of the 8th Manufacturing Engineering Society International Conference, Procedia Manufacturing. 2019, Volume 41, pp. 26–33. Available online: www.sciencedirect.com (accessed on 9 March 2020).
- Namuduri, S.; Narayanan, B.N.; Salini, V.; Davuluru, P.; Burton, L.; Bhansali, S. Review—Deep Learning Methods for Sensor Based Predictive Maintenance and Future Perspectives for Electrochemical Sensors. J. Electrochem. Soc. 2020, 167, 037552. [Google Scholar] [CrossRef]
- Arteaga, A.G.; Calvo, R. Experimental Analysis of Alternative Production Flow Controls for High Variety Product Manufacturing. In Proceedings of the 8th Manufacturing Engineering Society International Conference, Procedia Manufacturing. 2019, Volume 41, pp. 249–256. Available online: www.sciencedirect.com (accessed on 9 March 2020).
- Fadzly, M.; Saad, M.; Shayfull, Z. Analysis on Flexible Manufacturing System Layout Using Arenas Simulation Software. In Proceedings of the American Institute of Physics 3rd Electronic and Green Materials International Conference Positron Annihilation (ICPA-18), Kolkata, India, 12–15 September 2017. [Google Scholar]
- Lucke, M.; Mei, X.; Stief, A.; Chioua, M.; Thornhill, N.F. Variable selection for waste detection and identification based on mutual information of alarm series. In Proceedings of the 12th DYCOPS Symposium, Floriańpolis, Brazil, 23–26 April 2019; pp. 673–678. [Google Scholar]
- Chen, K.; Chang, C.-C. High-capacity reversible data hiding in encrypted images based on extended run-length coding and block-based msb plane rearrangement. J. Vis. Commun. Image Represent. 2019, 58, 334–344. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, X.; Zhang, Q.; Xu, B.; Xue, J. Image alignment based perceptual image hash for content authentication. Int. J. Signal Process. Image Commun. 2020, 80, 115642. [Google Scholar] [CrossRef]
- Su, J.; Vargas, D.V.; Sakurai, K. One-Pixel Attack for Fooling Deep Neural Networks. arXiv 2018. Available online: https://arxiv.org/pdf/1710.08864.pdf (accessed on 24 January 2018).
- Fang, Y.; Li, Y.; Tu, X.; Tan, T.; Wang, X. Face completion with Hybrid Dilated Convolution. Int. J. Signal Process. Image Commun. 2020, 80, 115664. [Google Scholar] [CrossRef]
- Matteo, L.; Mauger, G.; Dazin, A.; Tauveron, N. Modelling of a radial pump fast startup with the cathare-3 code and analyse of the loop response. In Proceedings of the 13th European Conference on Turbomachinery, Lausanne, Switzerland, 8–12 April 2019. [Google Scholar]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. Image Net Large Scale Visual Recognition Challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef]
- Yosinski, J.; Clune, J.; Bengio, Y.; Lipson, H. How Transferable Are Features in Deep Neural Networks? arXiv 2014. Available online: https://arxiv.org/pdf/1411.1792.pdf (accessed on 25 January 2018).
- Wilcox, D. Multiscale model for turbulent flows. In Proceedings of the AIAA 24th Aerospace Sciences Meeting, American Institute of Aeronautics and Astronautics, New York, NY, USA, 6–9 January 1986. [Google Scholar]
- Melzer, S.; Schepeler, S.; Kalkkuhl, T.; Friedrich, J.; Skoda, R. Experimental investigation of transient characteristics of single-blade and two-blade pumps. In Proceedings of the 13th European Conference on Turbomachinery, Lausanne, Switzerland, 8–12 April 2019. [Google Scholar]
- Weissenbrunner, A.; Fiebach, A.; Schmelter, S.; Bnr, M.; Thamsen, P.U.; Lederer, T. Simulation-based determination of systematic errors of flow meters due to uncertain inflow conditions. Int. J. Flow Meas. Instrum. 2016, 52, 25–39. [Google Scholar] [CrossRef]
- Steinbock, J.; Weissenbrunner, A.; Juling, M.; Lederer, T.; Thamsen, P.U. Uncertainty evaluation for velocity–area methods. Int. Flow Meas. Instrum. 2016, 48, 51–56. [Google Scholar] [CrossRef]
- Tran, V.T.; Pham, H.T.; Yang, B.S.; Nguyen, T.T. Machine performance degradation assessment and remaining useful life prediction using proportional hazard model and support vector machine. Mech. Syst. Signal Process. 2012, 32, 320. [Google Scholar] [CrossRef]
- Zhang, C.; Ma, Y. Ensemble Machine Learning; Springer: New York, NY, USA, 2012. [Google Scholar]
- Winiczenko, R.; Go’rnicki, K.; Kaleta, A.; Janaszek-Man’kowska, M. Optimisation of ANN topology for predicting the rehydrated apple cubes colour change using RSM and GA. Neural Comput. Appl. 2018, 30, 1795–1809. [Google Scholar] [CrossRef] [PubMed]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Effect Factors | Levels | Effect Factors | ||||
|---|---|---|---|---|---|---|
| Low | High | Low | High | |||
| 1. Liquid temperature | 19 °C | 47.41 °C | 5. Circulation number (Ω) | 1.135 | 1.286 | |
| 2. Ambient temperature | 5 °C | 50.56 °C | 5.1.Vane angle, anti-CW | −7.4° | −2° | |
| 3. Nozzle diameter | 4 mm | 9 mm | 5.2. Vane angle, CW | +2.5° | +12° | |
| 4. Reynolds number Re | 662 | 3312 | 6. Kinematic viscosity (m2/s) | 40 | 50 | |
| Initial range | 4.1. Vertical hose | 662 | 7305 | 7. Pressure | 200 Pascal | 300 Pascal |
| 4.2. Horizontal hose | 872 | 10737 | 8. Kinematic viscosity | 40 | 50 | |
| 9. Viscosity | 100 | 486.67 | ||||
| Parameters | Down | Up | |
|---|---|---|---|
| X1 | Neuron number | 2 | 16 |
| X2 | Learning rate | 0.01 | 0.4 |
| X3 | Training epoch | 200 | 2500 |
| X4 | Momentum constant | 0.1 | 0.9 |
| X5 | Number of training runs | 3 | 7 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abed, A.M.; Elattar, S.; Gaafar, T.S.; Alrowais, F.M. The Neural Network Revamping the Process’s Reliability in Deep Lean via Internet of Things. Processes 2020, 8, 729. https://doi.org/10.3390/pr8060729
Abed AM, Elattar S, Gaafar TS, Alrowais FM. The Neural Network Revamping the Process’s Reliability in Deep Lean via Internet of Things. Processes. 2020; 8(6):729. https://doi.org/10.3390/pr8060729
Chicago/Turabian StyleAbed, Ahmed M., Samia Elattar, Tamer S. Gaafar, and Fadwa Moh. Alrowais. 2020. "The Neural Network Revamping the Process’s Reliability in Deep Lean via Internet of Things" Processes 8, no. 6: 729. https://doi.org/10.3390/pr8060729
APA StyleAbed, A. M., Elattar, S., Gaafar, T. S., & Alrowais, F. M. (2020). The Neural Network Revamping the Process’s Reliability in Deep Lean via Internet of Things. Processes, 8(6), 729. https://doi.org/10.3390/pr8060729