5.1. Grid Study
In micro-channels, small molecular diffusion coefficients induce sharp concentration gradients which is problematic in numerical approximation. In this case, numerical techniques employed may render erroneous solutions depending on several factors. In our previous studies [
45,
46], numerical diffusion errors are exhaustively studied. It was shown that preserving an orthogonality between flow and grid boundaries helps to minimize unphysical diffusion production in the solution. This is often possible employing hexahedron-type mesh elements and high mesh densities. More details about the effects of grid properties and quantification of numerical diffusion errors may be found in the References [
45,
46]. In the present study, five different mesh levels, consisting of brick elements, are used to determine a mesh density in which spatial discretization errors are insignificant. Differences between total element numbers are chosen adequately to capture numerical errors. The properties of mesh levels tested are given in
Table 2.
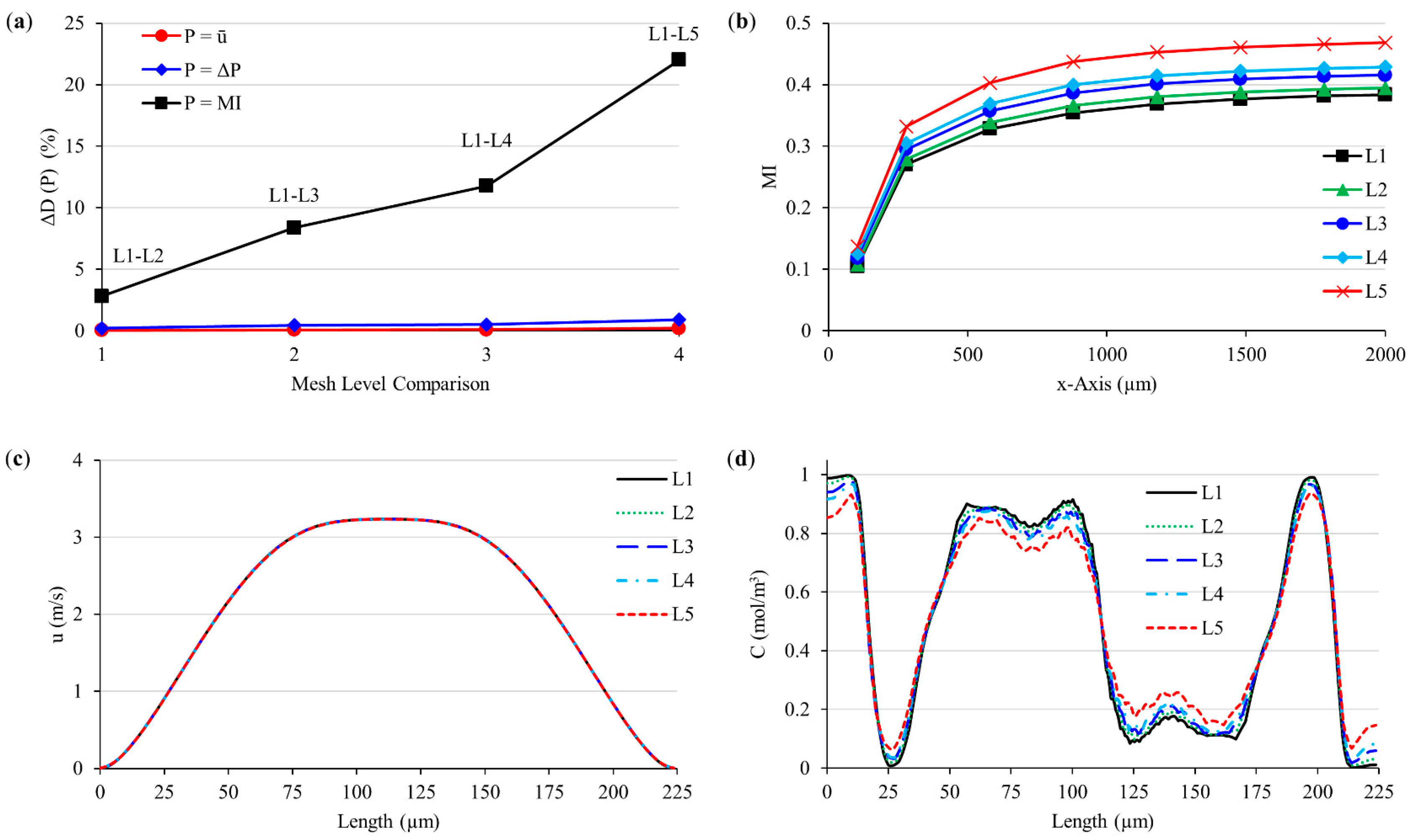
Grid study is conducted for the CT-VS-AI scenario. Numerical simulations are performed for the worst-case scenario in terms of numerical diffusion production tendency (i.e., Re = 240 and
D =
D1). Using Equation (6) [
45], the difference between each level and the finest mesh is quantified. In Equation (6), while
P denotes the parameter used in the grid study, Δ
D represents the difference between levels based on the parameter. The discrepancy between mesh levels is quantified for the following flow and transport parameters. Pressure drop in the micromixer, average velocity (
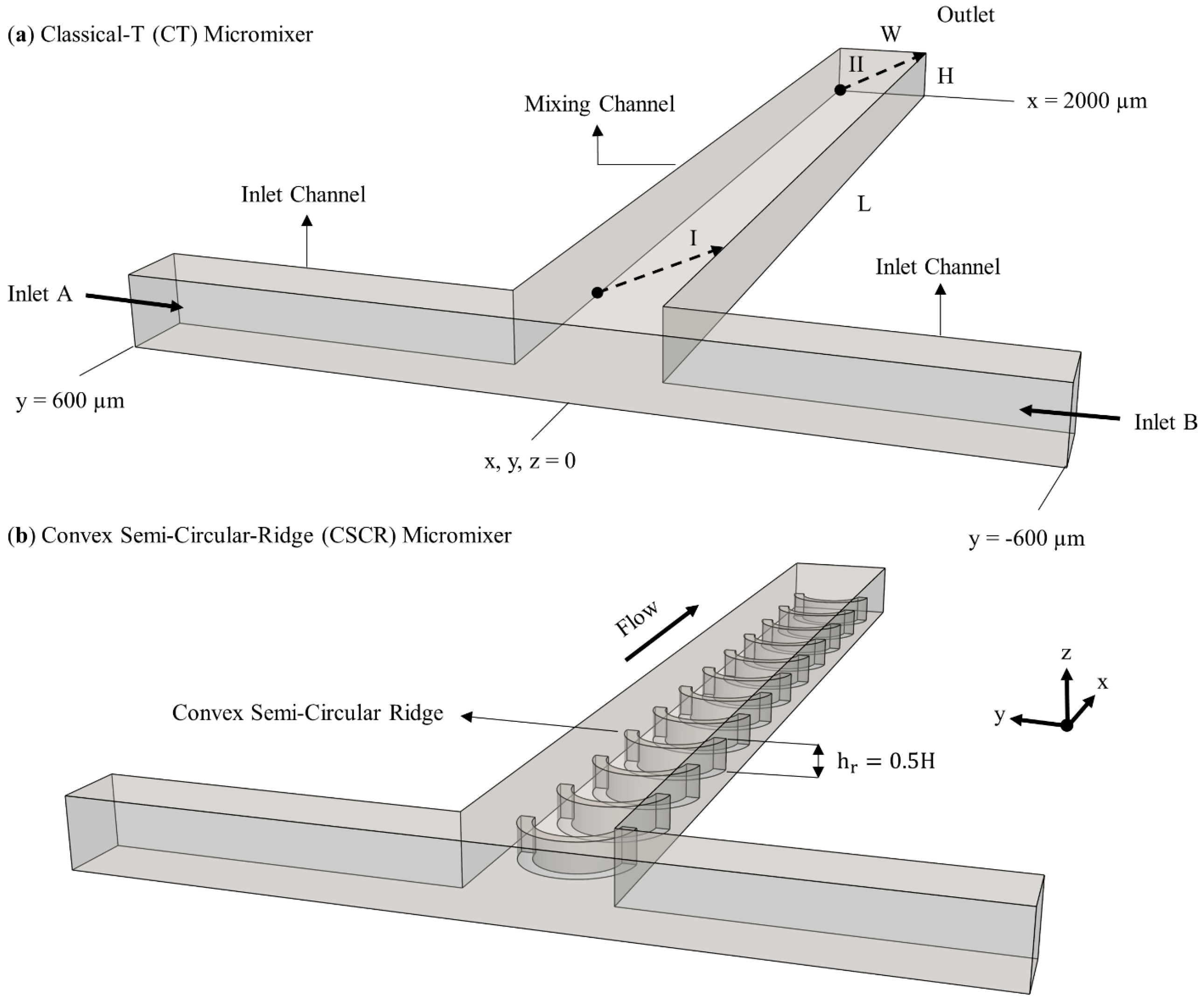
ū) on the dashed line arrow I in
Figure 1, and mixing index at the outlet.
Figure 3a shows that the maximum difference, occurred between L5 and L1 levels, is less than 1% for both flow parameters. According to the trendlines, even the coarsest mesh level is enough to render the flow field quite accurately. However, in contrast to the small Re number in the flow simulation, the transport domain is resolved for a high Pe number, on the order of 8 × 10
5. When
MI parameter is used, the highest difference is observed as 22% between L5 and L1. The peak difference is followed by the values of 11.8%, 8.3%, and 2.8% for other grid level comparisons. Such a big difference between grids emerged as a result of numerical diffusion generation in the solution. In micromixer studies where advective transport inherently prevails, evaluation of flow parameters alone may lead to the reporting of unphysical mixing outcomes. Meanwhile, the development of mixing on several planes along the mixing channel is shown in
Figure 3b. In addition, velocity and concentration distributions at the exit (i.e., on the dashed line arrow II in
Figure 1) are plotted in
Figure 3c,d respectively. As can be seen from the graphs in
Figure 3a,b, and
Figure 3d, the results obtained from different grid levels, converge to the finest grid. When the top two mesh densities are compared, increasing the element numbers by 3.2 million cause a 2.8% change in the mixing index value. Hence, considering the high computational expense against an insignificant accuracy gain, L2 grid size is selected for the rest of the simulations in this paper. It should be also noted, that the mixing outcomes, obtained in this work, are consistent with the experimental studies in the literature (see the References [
39,
51]). For instance, Silva et al. [
51] investigated a CT-FI-RI configuration experimentally with similar micromixer dimensions and fluid properties employed in this research. Authors reported around 30% and 3.2% mixing efficiency at Re = 256 and 50 respectively. In the present study, the degree of mixing is quantified as 28% and 2.8% for Re = 240 and 40 flow conditions respectively.
5.2. Classical-T (CT) Micromixer
In this section, the mixing characteristics of the CT micromixer is investigated for the entire Re scenarios and molecular diffusion constants given in
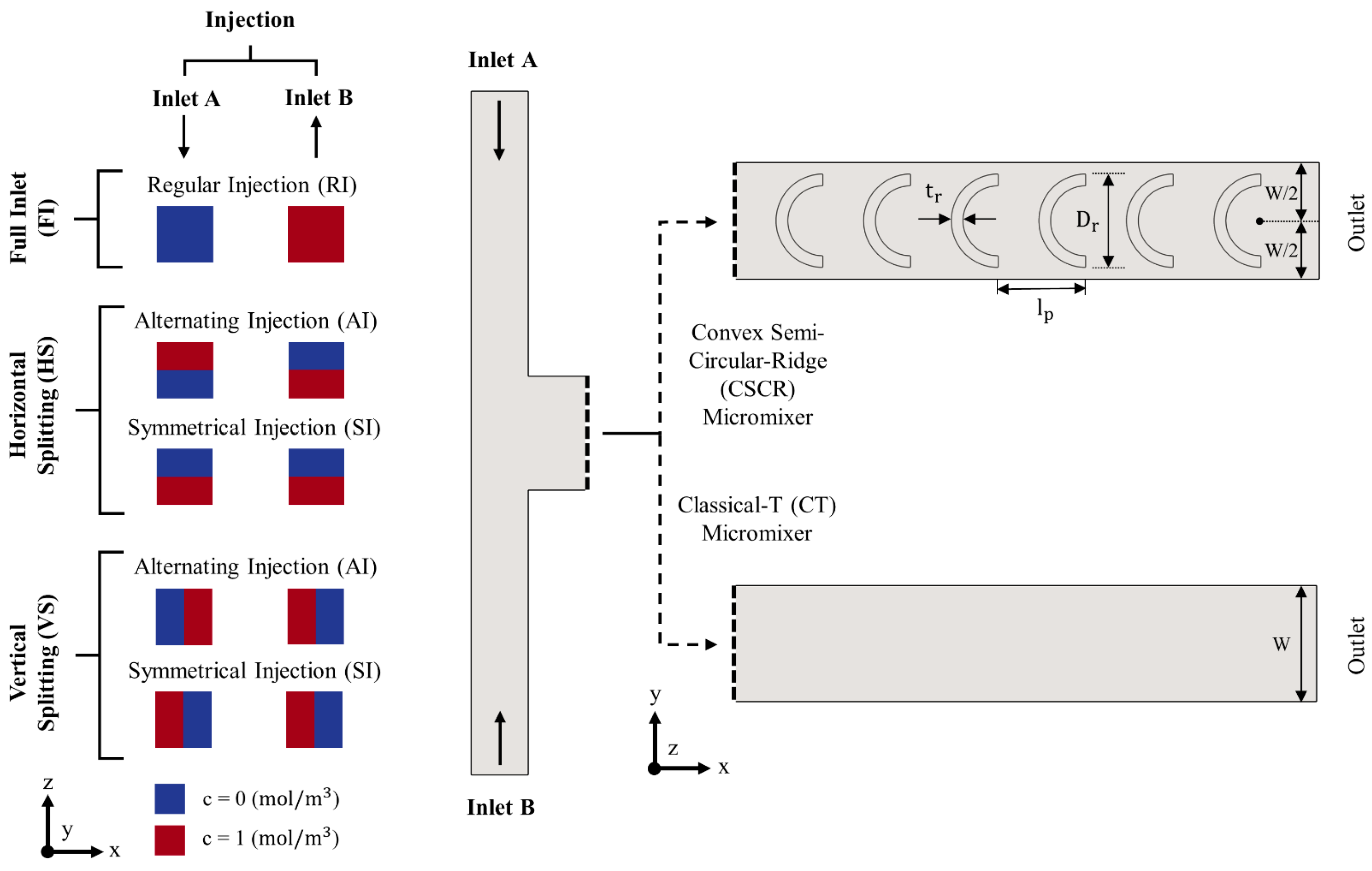
Table 1. In addition, all inlet types and injection methods in
Figure 2 are tested to survey mixing effects. In the CT micromixers, typically following flow regimes develop depending on the flowrate imposed: separated (i.e., segregated), vortex, and engulfment.
Figure 4 illustrates the fluid path lines in these flow types with occurrence Re numbers. In a separated flow—which is usually observed in highly laminar flow conditions—fluids, coming from inlets, travel alongside in the mixing channel. In this flow type, fluid bodies create a small contact surface and therefore mixing is completely controlled by molecular diffusion. In vortex flow, however, impingement of streams at the center of the confluence region creates two-counter-rotating vortex pairs in each side of the mixing channel. The periodic movement of fluids relatively increases the contact surface area in comparison with segregated flows. Furthermore, flow type is described as engulfment when the inlet streams partially reach the opposite side of the mixing channel. In engulfment flow, fluid bodies can be stretched, and the contact surface is enlarged higher than that of separated and vortex flow profiles.
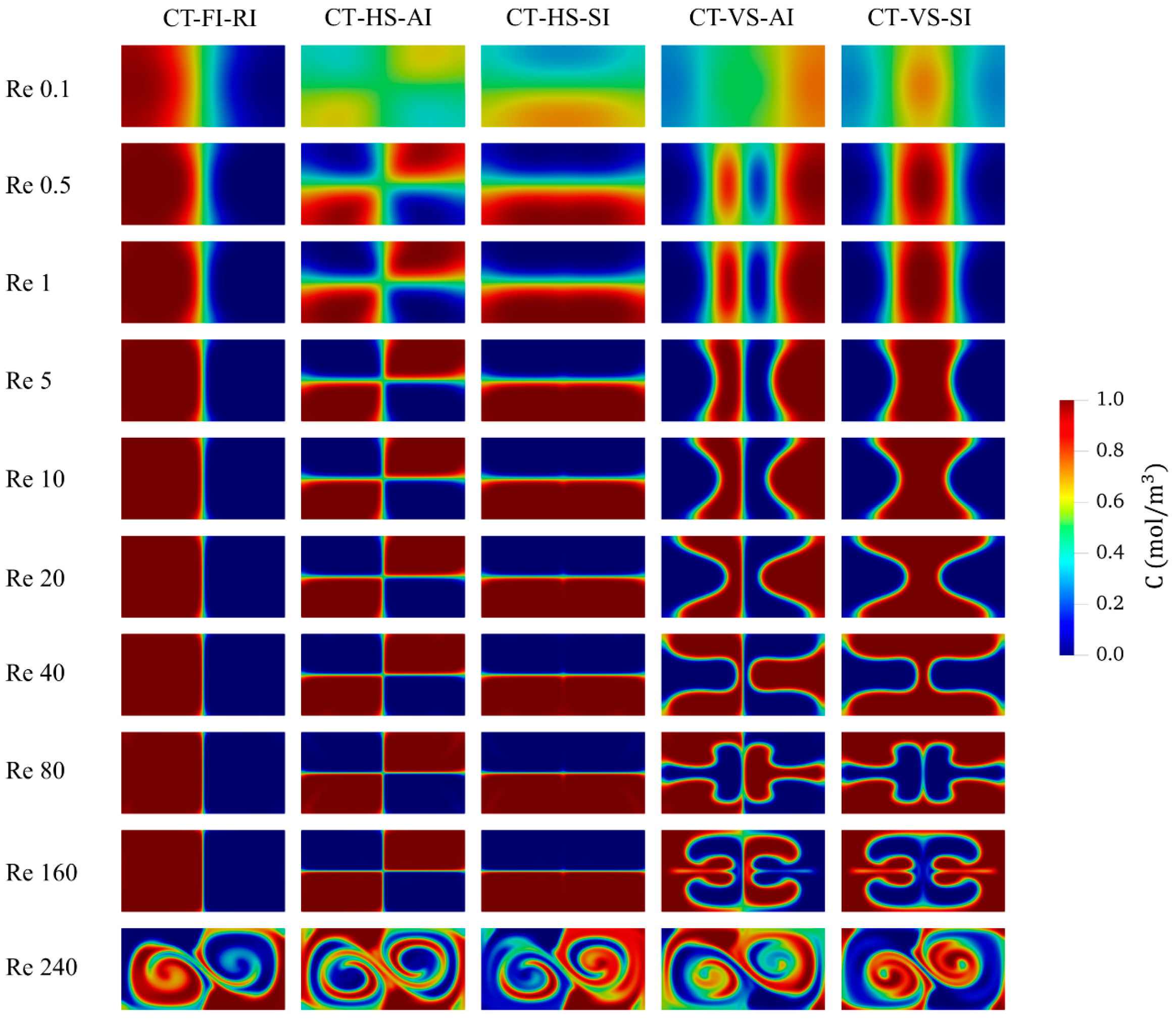
Pressure drops and outlet mixing efficiencies—which are obtained from CT-FI-RI micromixer configuration—are plotted in
Figure 5a,b respectively. As shown in
Figure 5a, while the pressure drop values are less than 1 kPa until Re = 40, the formation of complex flow patterns sharply increases the pressure difference between inlets and outlet. The maximum pressure drop is observed in the engulfment flow regime with a value of slightly over 15 kPa. Mixing indexes, on the contrary, follow a reverse trend with rising flowrates till the highest flow scenario as shown in
Figure 5b. In very low Re conditions (e.g., Re = 0.1 and 0.5), relatively high mixing efficiencies are obtained due to long residence time of fluids in the mixing channel. In this case, fluid mixing is purely characterized by diffusive mixing mechanism which is a slow process. Besides, further increase of the Re number yields advection dominant transport conditions where the effect of molecular diffusion is substantially reduced. As a result of diminishing residence times and limited contact surface area formed, mixing indexes continually drop until the Re = 240 flow scenario. Nevertheless, when the engulfment flow pattern is created in the mixing channel, mixing efficiency is mainly enhanced due to the chaotic motion of fluids. In this flow scenario, a mixing index value, around 33%, is obtained at the exit of CT-FI-RI micromixer for all molecular diffusion coefficients, simulated.
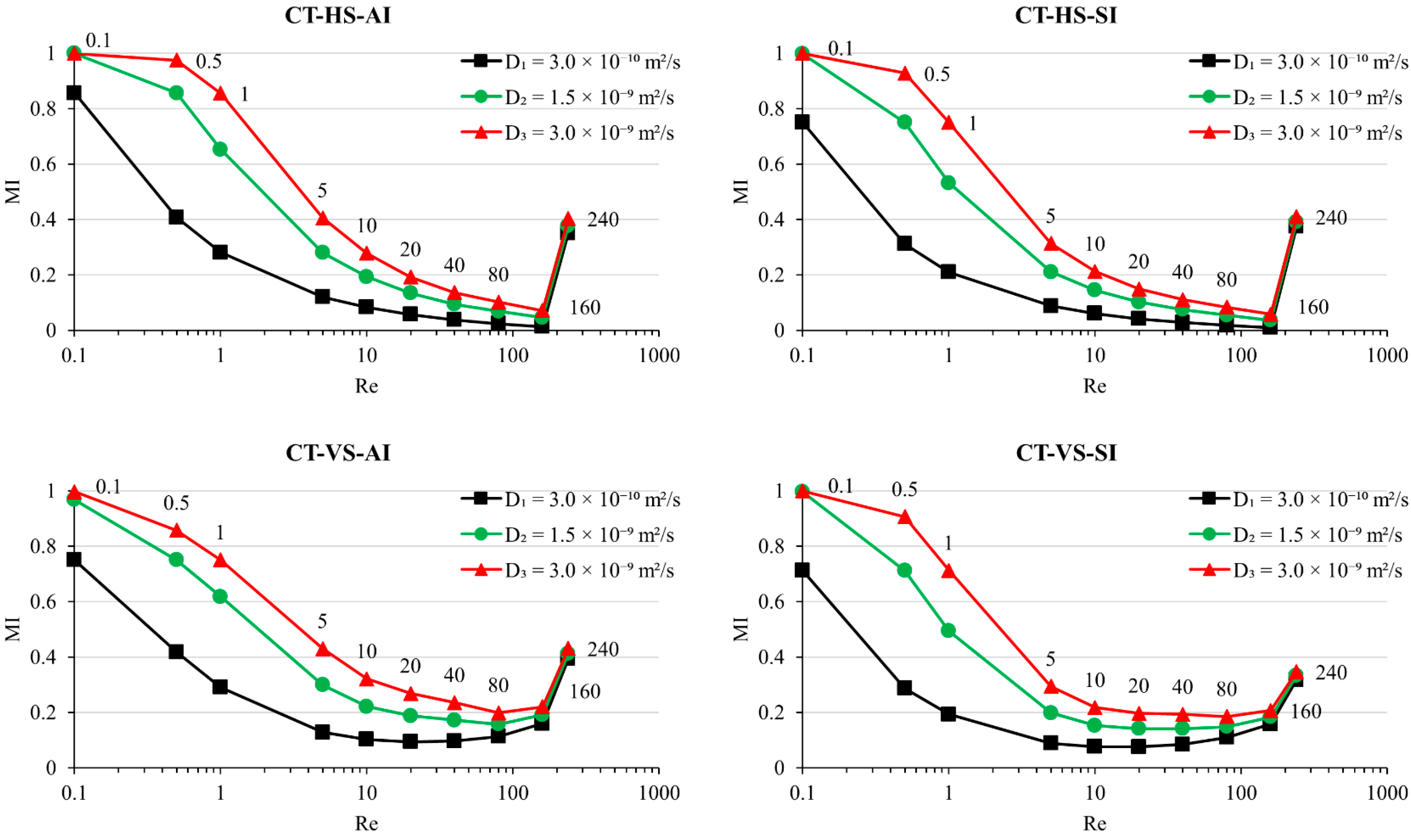
The mixing outcomes of the CT-FI-RI micromixer show that secondary flows, developed in the mixing channel, cannot be exploited efficiently. For further investigation of improving the degree of mixing in the CT micromixer, alternative injection types are tested. As shown in
Figure 6, multi-injection application contributes to the effective utilization of flow profiles generated in the CT micromixer. While the enhancement of mixing is apparent in separated and vortex flows, split inlets yield quite similar outcomes with the CT-FI-RI configuration at Re = 240. In low Re cases (e.g., Re = 0.1, 0.5, and 1), horizontal and vertical split inlets improve mixing efficiency due to the formation of additional contact layer in inlet channels. In such flow conditions, the amount mixing efficiency is fundamentally determined by the magnitude of molecular diffusion constant. In vortex flow type, however, the enhancement of mixing is mainly affected from splitting type. Namely, while the trendlines continue dropping with increasing Re number in horizontal splitting cases, vertical injection of fluids improves the degree of mixing in cases where Re > 20 (
D =
D1). This is basically because vertically travelling fluids in the inlet channels form the upper and lower vortices jointly (see the vortex pairs in each side of the mixing channel in
Figure 4). On the contrary, if the flows are aligned horizontally, double vortex pattern is formed separately by top and bottom streams in an inlet channel. The effect of splitting and injection types can be seen in
Figure 7, in which outlet concentration distributions are shown. Meanwhile, in both split inlet types, alternating injection presents slightly better mixing values until the engulfment flow case. Such a gain in mixing efficiencies is achieved as a result of extra contact surface, formed between inlet streams along the mixing channel. In engulfment region, however, all the test scenarios yield almost identical mixing efficiencies due to small residence time of fluids in the micromixer. Even though contact surface is inherently larger in alternating injection modes, this is inhibited by relatively short contact time between fluids. Thus, diffusive mixing cannot be utilized effectively, and all splitting and full inlet scenarios provide quite similar mixing results based on advective mixing.
As shown in this section, mixing of fluids in CT micromixers is rather challenging. Despite observing mixing enhancement for multiple injection strategies, the degree of mixing is still far behind the desired levels (e.g., 80%). Particularly, mixing indexes, obtained from the lowest diffusion constant (D1), are unacceptable for several applications. However, it should be noted that the results, acquired from CT micromixers, are pivotal to understanding flow and transport dynamics in micro-scales and to develop effective alternative designs.
5.3. Convex Semi-Circular-Ridge (CSCR) Micromixer
In passive mixing approach, the development of chaotic advection is essential to achieve well-mixed fluids over a short distance. In this sense, the chaotic advection involves the processes in which fluids are subjected to split, stretch, twist or fold flow configurations. In CT micromixers, chaotic fluid flow is created by vortex and engulfment regimes. However, the deformation of fluid bodies is insufficient to substantially increase the mixing index. Besides, pressure drops, required to form the complex flow patterns, are relatively high as presented in
Figure 5. Therefore, the CSCR micromixer is designed to generate an effective chaotic fluid motion under low pressure drop conditions. The novel design is tested for a Re number range between 0.1 and 40. Mixing characteristics are investigated for the split inlet configurations with alternating and symmetrical injections. Additionally, simulations are extended for several diffusion constants to analyze the micromixer under different diffusivity conditions.
In the CSCR micromixer, two counter-rotating, helicoidal-shaped flow profiles are developed along the mixing channel as illustrated in
Figure 8. The rotational fluid motion is created employing the stationary semi-circular mixing elements, aligned in the streamwise direction. As a result of effective design factor, the formation of helicoidal patterns starts right after the confluence region and continues along the mixing channel. The semi-circular ridges, which are positioned convexly on the bottom floor of the mixing channel—function to deflect and raise the flows as follows. When the incoming inlet streams reach the first mixing element, fluids, flowing at the height of ridges, i.e.,
z ≤ 50 µm (see the blue arrow lines in
Figure 8), are split and diverted to the gaps, exist between the ridge and side walls of the mixing channel. In this region, the amount of fluid flow is controlled by a small gap size. Accordingly, fluid volume is raised over the gap, and flow continues with a leaning motion towards the center of the mixing channel (i.e.,
y = 0).
Such an oblique fluid motion is primarily ensured by the convex curvature of the semi-circular ridge. In the meantime, the upper streams, flowing at
z > 50 µm (see the red arrow lines in
Figure 8), are pushed inwards due to the fluid volume, increased at the edges (see the thick, black arrows). Later, these streams are split and diverted to the side walls by the following ridges in the mixing channel. It should be pointed out here that the symmetrical, leaning flows converge at the center of the mixing channel (
y = 0) after flowing over the next several ridges (see the pathlines in
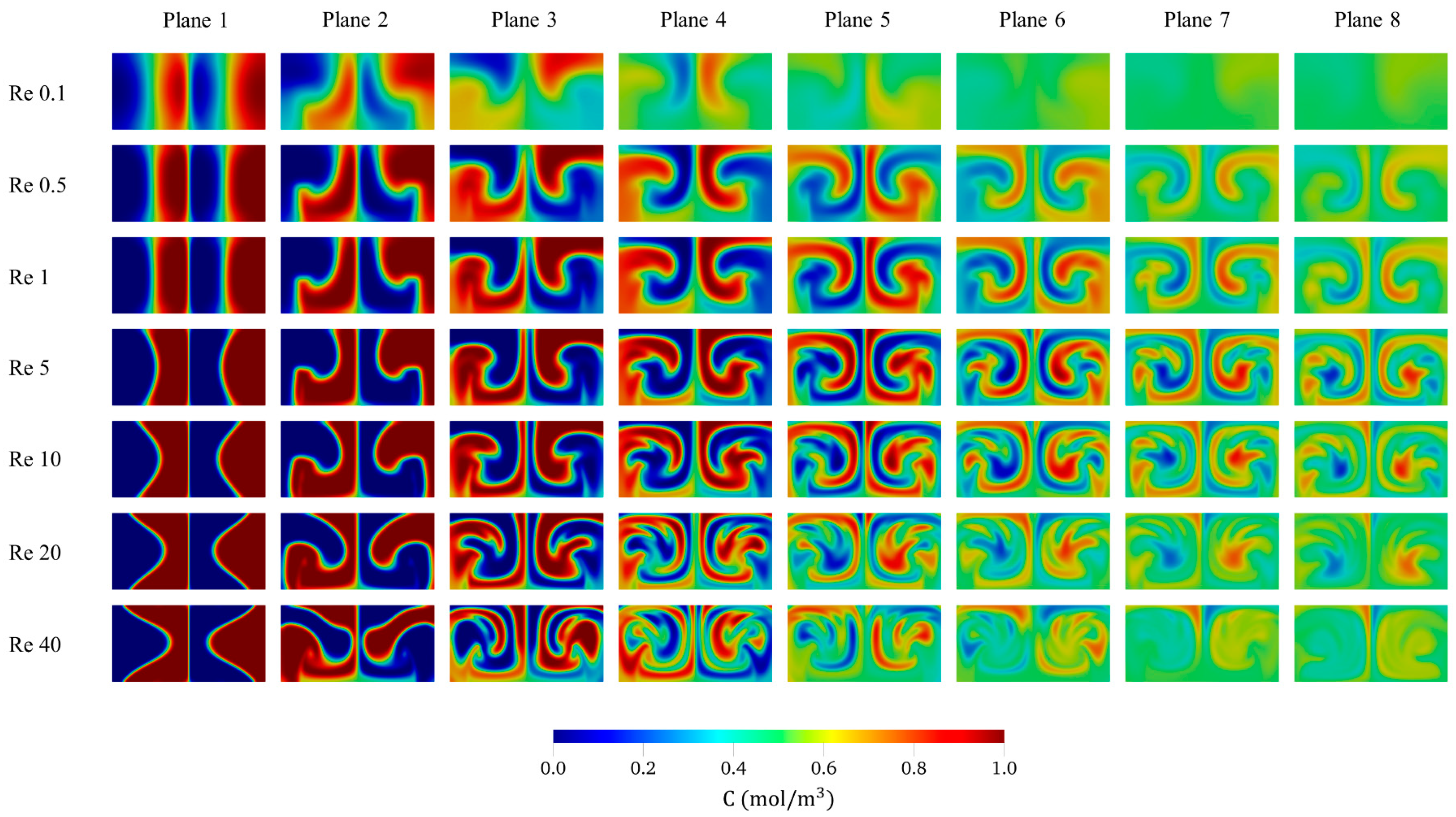
Figure 8). By this way, straight fluid flow, above the obstructions, is blocked in the streamwise direction. So that the upper streams are intrinsically forced to use the paths between consecutive ridges. In the same way, fluids are raised over the gaps and follow the same oblique path towards the center of the mixing channel. The formation of rotational fluid flow along the mixing channel can be also tracked from
Figure 9 which shows concentration distributions along the mixing channel of CSCR-VS-AI configuration (
D =
D1). Rotational fluid motion is observed even at the smallest flow case tested (i.e., Re = 0.1). In addition, the frequency of rotations is improved with increasing Re number.
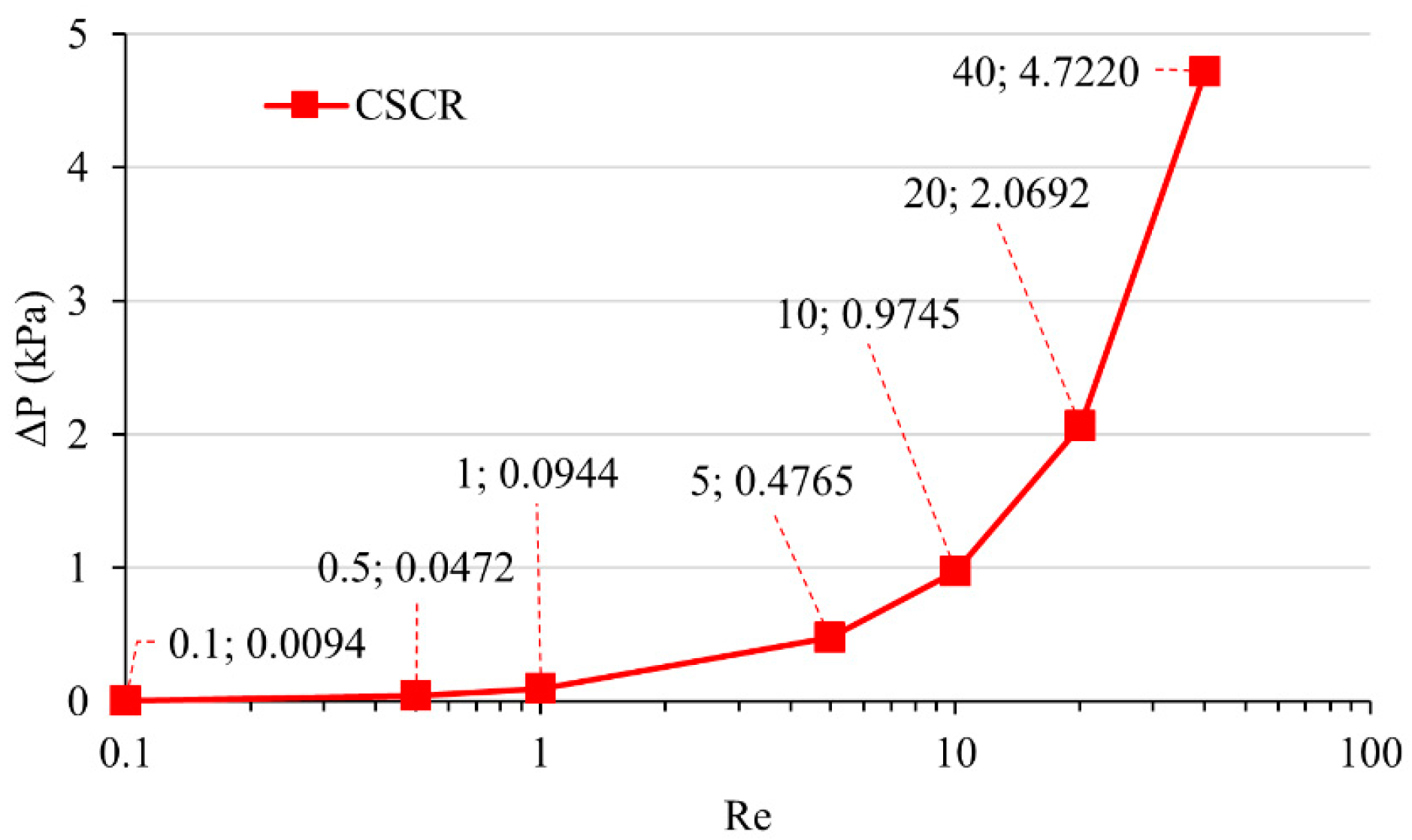
The maximum flow scenario is chosen as Re = 40 for the CSCR micromixer simulations. It is clear from the trend shown in
Figure 9 that the chaotic behavior of fluid flow and therefore fluid mixing improve with rising Re. Further increase of Re after Re = 40 will increase the intensity of rotations and provide better mixing efficiencies with a cost of higher pressure drop and thus energy requirement. For the Re = 40 case, an effective chaotic fluid flow has yielded a mixing efficiency value greater than 80% with a feasible pressure drop. As a result of the small form factor of the semi-circular ridges, the CSCR micromixer produces the helicoidal fluid motion resulting in low pressure drops. As shown in
Figure 10, the pressure drops are obtained as 2.07 and 4.72 kPa at Re = 20 and 40 flow scenarios respectively. When these values are compared with the outcomes of micromixers, reviewed in the introduction section, the energy requirement of the CSCR micromixer is far less than that of reported in the literature.
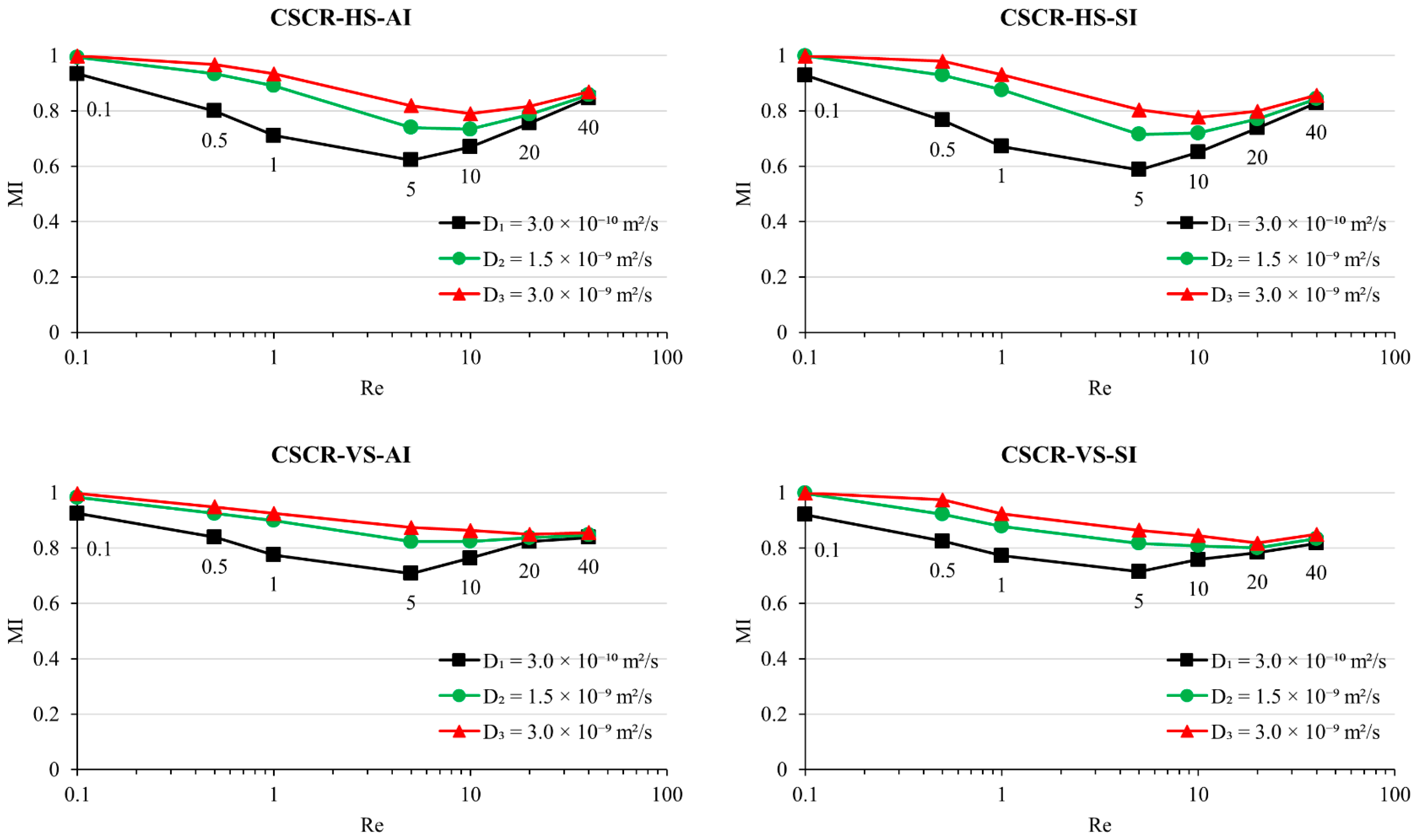
Meanwhile, mixing results indicate that alternating and symmetrical injection modes provide parallel mixing outcomes as shown in
Figure 11. Similar mixing efficiencies are observed as a result of intermittent contact time between two flow profiles in the mixing channel. Namely, diffusive interaction between the counter-rotating, helicoidal-shaped flows is quite limited due to ongoing rotations.
Therefore, the additional contact surface area, which is formed at the center of the mixing channel (
y = 0) in alternating injection mode, cannot be utilized pointedly. The type of splitting, however, affects the utilization of the chaotic flow profile as illustrated in
Figure 12. In the mixing channel, the distribution of concentration differs with the splitting type. During the development of the helicoidal-shaped profile, the regions, above (
z > 50 µm) and below (
z ≤ 50 µm) the mixing elements, are fed dissimilarly depending on the splitting type. While the horizontal split inlets deliver a different fluid (
c = 0 or 1 mol/m
3) to each region, the vertical split inlets feed the upper and lower sections with a fluid pair (
c = 0 and 1 mol/m
3). Hence, in comparison to the horizontal type, the use of vertical split inlets forms a relatively high contact surface. Besides, the lowest mixing outcomes are obtained when the CSCR micromixer is operated in FI-RI mode. Since each of the helicoidal flows is generated separately by the fluids coming from inlet A and B as shown in
Figure 8, the only contact surface is formed between counter-rotating fluid bodies along the center of the mixing channel (
y = 0). In this case, the CSCR-FI-RI design is reduced to the CT-FI-RI micromixer. Both configurations yield almost identical mixing efficiencies and concentration distributions as presented in
Figure 5b and
Figure 7 respectively (see the outcomes of the CT-FI-RI for Re = 0.1–40). Thus, the active utilization of the helicoidal flows is primarily controlled by the horizontal or vertical feeding type of the CSCR micromixer.
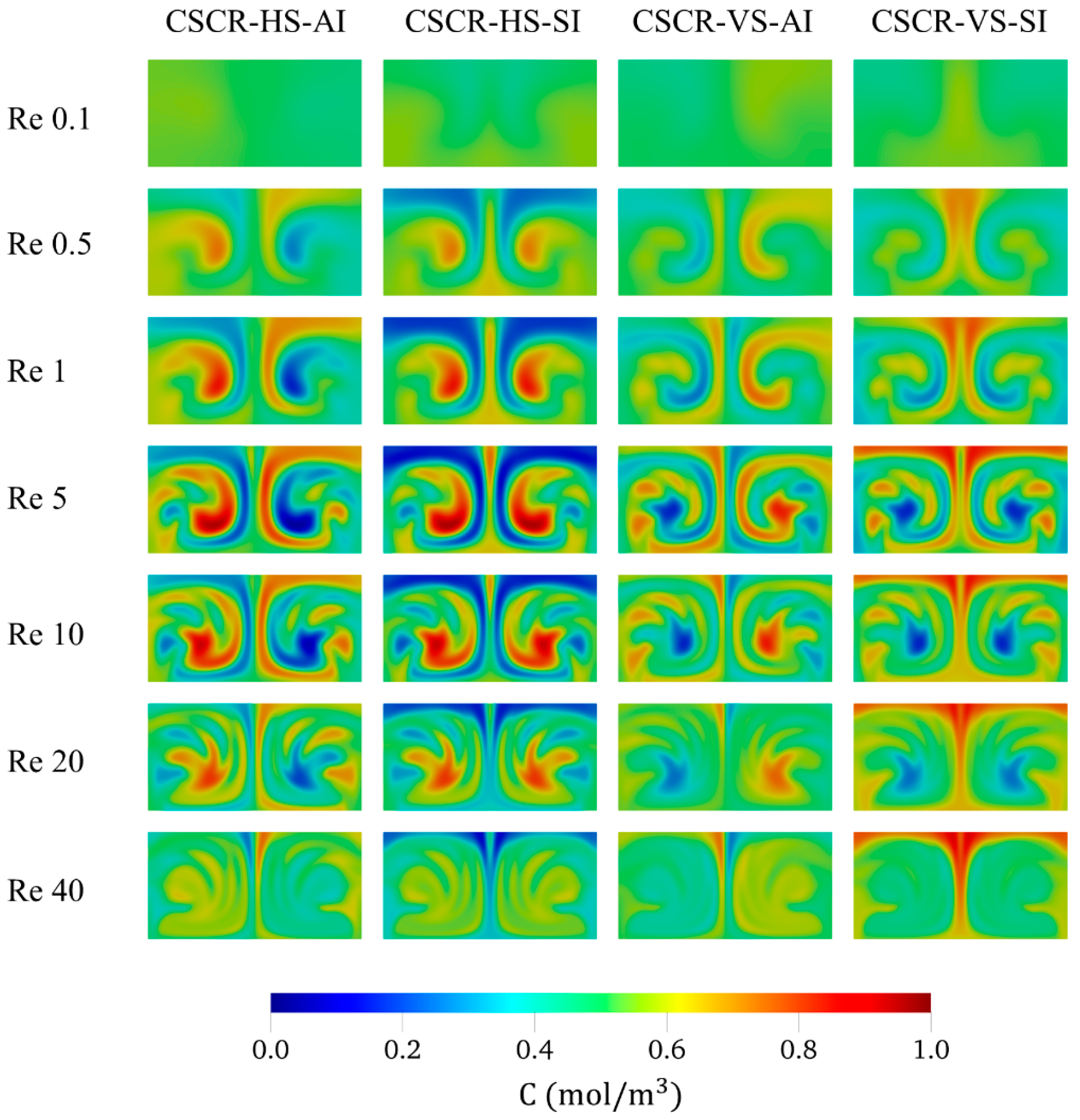
When the CSCR-HS-AI and CSCR-VS-AI configurations are compared, vertical split inlet provides higher mixing index values for the Re numbers between 0.5 and 20. The minimum and maximum variances are observed as 4.7% and 12.3% at Re = 0.5 and 10 flow conditions respectively (
D =
D1). Based on the differences calculated, the effect of additional fluid pair is more prominent in the transition region, i.e., Re = 1–10. Besides, equal amount of mixing efficiency is obtained for all diffusion constants at Re = 0.1 and 40. In the slowest flow case, the efficiency of mixing is primarily controlled by the diffusive mixing. The extent of contact surface area in micromixer configurations is substantially suppressed by the high residence time of fluids. After Re = 0.1, the function of molecular diffusion diminishes with decreasing fluid residence times. This is quite evident from the deviating trendlines of the smallest diffusion coefficient until Re = 5. After this flow case, the intensity of rotational flow profile is enhanced with rising flowrates. Trendlines show a convergent behavior due to developing complex flow patterns and lessening diffusion effects. Notably, diffusive mixing becomes negligible when the highest flow condition is reached. Fluids are mainly mixed based on the chaotic flow profile formed. Therefore, the same amount of mixing efficiency is obtained at Re = 40 regardless of the diffusion magnitudes. In all configurations, the minimum mixing index is obtained at Re = 5 flow scenario (
D =
D1). At this pivotal point, the degree of mixing is mostly controlled by the chaotic advection. The smallest diffusion constant yields 62% and 71% mixing efficiency in the CSCR-HS-AI and CSCR-VS-AI setups respectively. Meanwhile, the maximum mixing value in each Re case is usually provided by the CSCR-VS-AI configuration. In most cases more than 80% homogenous fluid mixing is obtained. In highly laminar flow regimes, mixing indexes are computed to be 92% and 84% for Re = 0.1 and 0.5 respectively (
D =
D1). Relatively low mixing efficiencies are observed in the transition region, i.e., Re = 1–10 (
D =
D1). The degree of mixing is quantified as 78% and 76.4% for Re = 1 and 10 respectively. Furthermore, nearly 83% and 85% mixing index is computed in the two most chaotic flow conditions respectively, i.e., Re = 20 and 40. Outlet concentration distributions of the CSCR micromixer configurations are shown in
Figure 13.
The CSCR micromixer activates an effective, chaotic fluid flow with rising flowrates. Especially, in the flow cases where Re = 20 and 40, fluid mixing is predominantly carried out based on strong deformation of fluid bodies. In other flow conditions, however, diffusive mixing affects the degree of mixing at different rates depending on the following factors: magnitude of molecular diffusion coefficient, fluid residence time, and the contact surface between fluids. The most challenging mixing conditions are observed in Re = 1, 5, and 10 scenarios when the molecular diffusion constant is too small (i.e., D = D1). Shortening residence time of fluids substantially inhibits the function of diffusivity whereas the contact surface is enlarged. Accordingly, fluids are largely mixed depending on the deformation rate of fluids in the rotations. Besides, in relatively high laminar flow region, i.e., Re = 0.1 and 0.5, diffusive interaction is amplified due to high contact time over the contact surfaces of fluid bodies. Therefore, the mixing of fluids is primarily conducted by diffusive mixing.
In
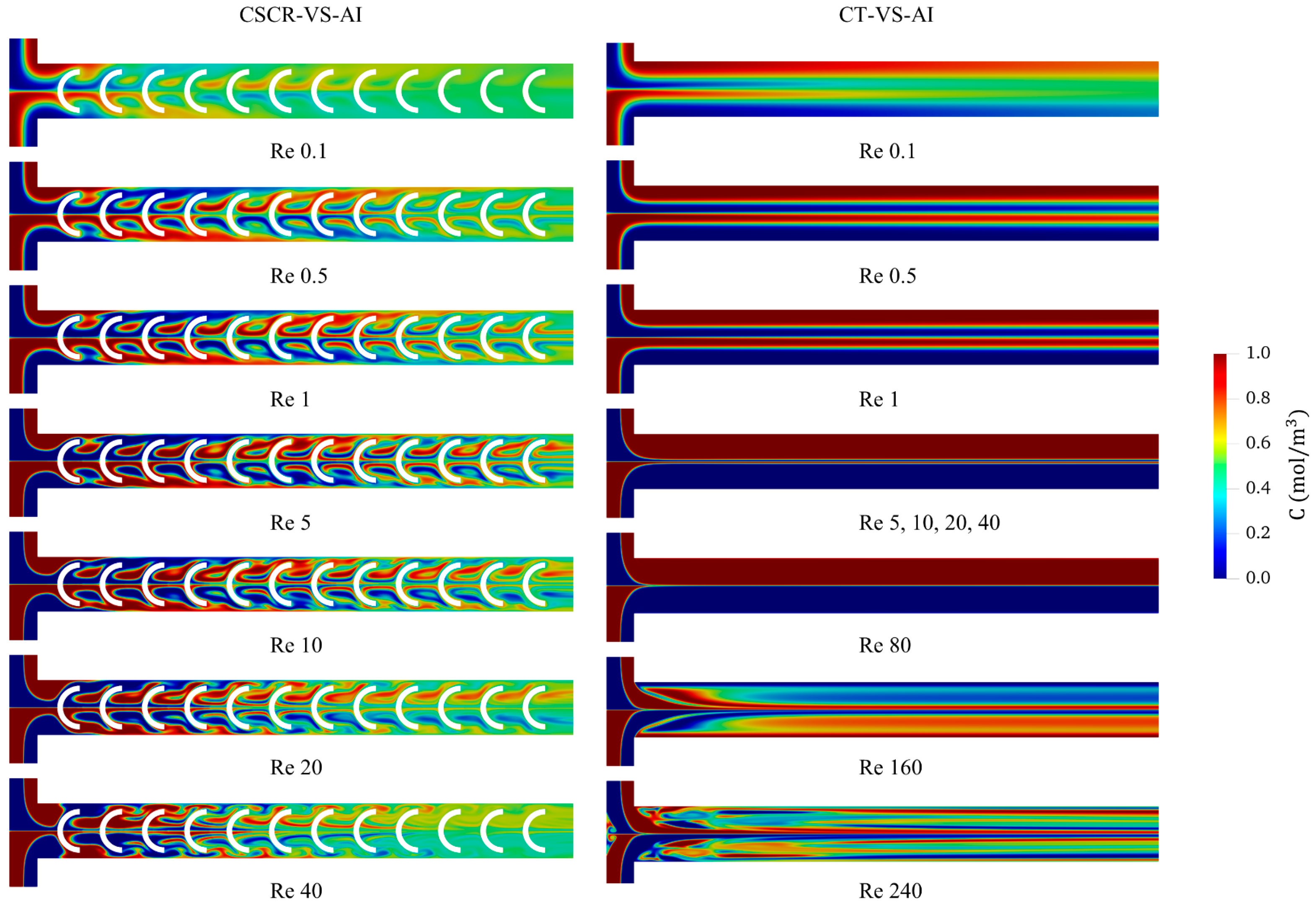
Figure 14a,b, the CSCR and CT micromixers are compared in terms of mixing efficiency and mixing performance. Vertical split inlets and alternating injection configurations are considered for both micromixers. Accordingly, only the effect of semi-circular ridges, in convex position, is highlighted. Bar charts are obtained normalizing the outcomes of the CSCR-VS-AI by that of the CT-VS-AI. In addition, concentration distributions on the
x-
y plane at the middle height (i.e.,
z = 50 µm) of the CSCR-VS-AI and CT-VS-AI micromixers are shown in
Figure 15 (
D =
D1).
Figure 14a indicates that the efficiency of mixing is substantially increased over the CT micromixer. The maximum improvement is observed for the smallest molecular diffusion coefficient tested because fluid mixing is primarily carried out based on the chaotic action. In highly laminar flow region, the ratios are found to be 1.23 and 2 for Re = 0.1 and 0.5 respectively (
D =
D1). The degree of mixing is enhanced up to 7.3 times over the CT design under the toughest mixing conditions, i.e., Re = 1–10. In the most chaotic region, however, the CSCR micromixer provides around 8.7 times higher mixing values. When the pressure drops are evaluated, comparatively lower ratios are obtained for mixing performance. The maximum ratio is observed as 3.3 at Re = 20. In the CSCR design, higher pressure drops are yielded as a result of mixing channel cross-section, confined by ridges. However, it should be noted that all the energy, spend in the CSCR micromixer, is utilized to form a rotational fluid motion. In contrast, CT micromixer results in lower pressure drops due to a smooth, segregated flow profile developed in the unobstructed mixing channel.
Meanwhile, the increase in mixing efficiency and mixing performance slows down with increasing diffusion magnitudes. Besides, the lowest ratios are observed in the highly laminar flow region (i.e., Re = 0.1, 0.5, and 1) as can be seen in
Figure 14a,b. First and foremost, the scarce contact time of fluids in the CSCR micromixer cause to yield lower ratios. Namely, fluid particles travel much faster in the CSCR micromixer as a result of mixing channel cross-section restricted. This can be seen in
Figure 6 and
Figure 11. Trendlines, belong to different diffusion constants, converge at Re = 20 and 160 in the CSCR-VS-AI and CT-VS-AI configurations respectively. Therefore, diffusive effects become more prominent in CT micromixer. Second, the CSCR micromixer develop higher mixing efficiencies in a shorter distance as shown in
Figure 14c,d. Mixing length reduces when the magnitude of diffusion coefficient is increased. Correspondingly, the actual pressure drops lessen when the number of mixing elements is reduced. Therefore, the ratios will increase in cases that the design outcomes are compared before the exit of the micromixers.
5.4. Alternative Micromixer Configurations
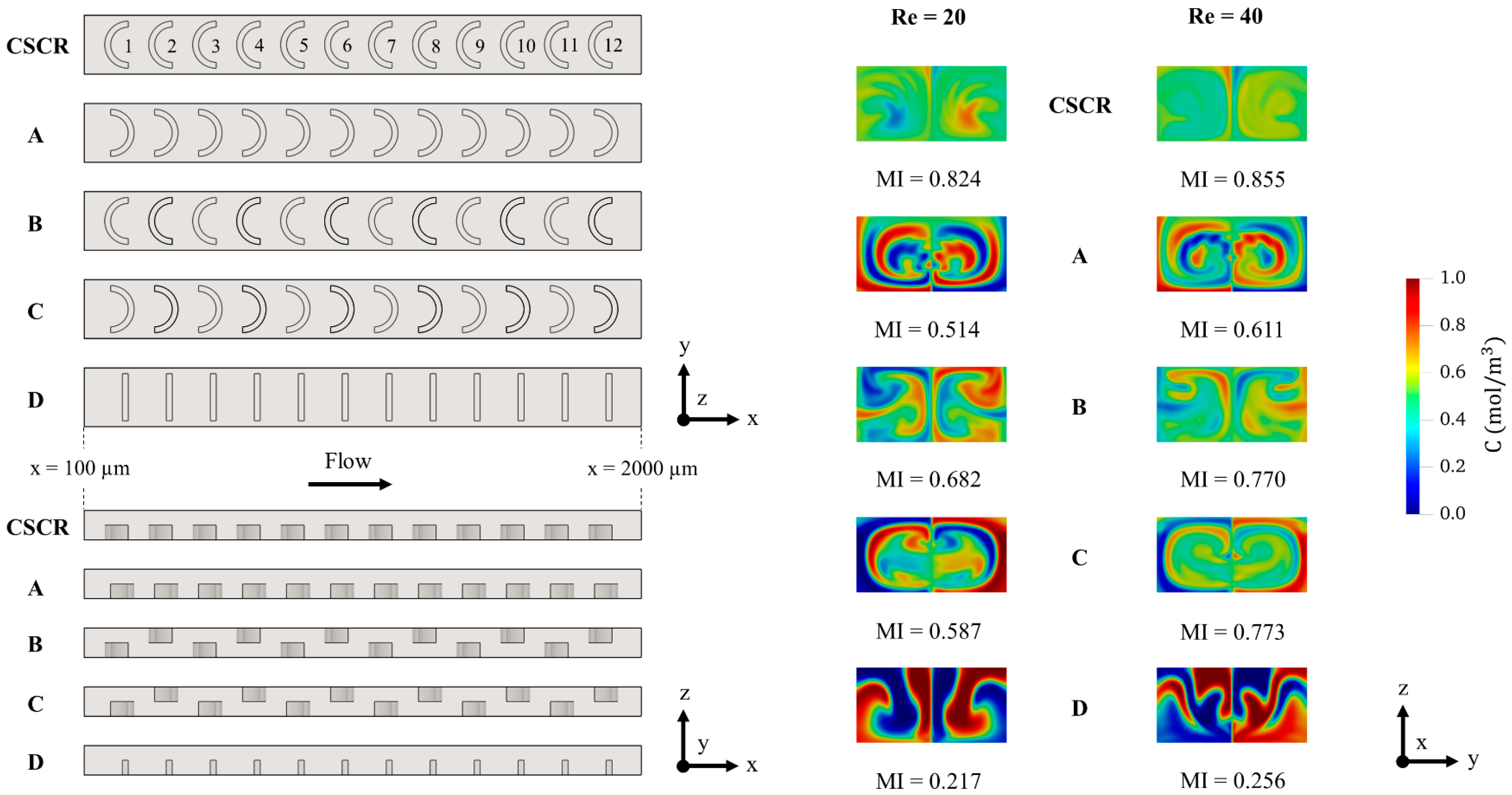
In the present study, alternative micromixer configurations are also examined as schematically shown in
Figure 16. The same geometrical dimensions are preserved in A, B, C and D designs with that of the CSCR micromixer (i.e.,
L,
W,
H,
hr,
Dr,
tr, and
lp). In the A, B, and C configurations, the different positioning effects of the semi-circular ridges are surveyed. In the design A, the mixing elements are positioned concavely on the bottom floor of the mixing channel. The same objects, however, are arranged as baffles with convex and concave orientations in the designs B and C respectively. In both setups, odd- and even-numbered ridges are located on the bottom and top floors of the mixing channel respectively. Besides, the effect of rectangular ridges, which are aligned on the bottom floor of the mixing channel, is investigated in the design D. All configurations are tested in the two most chaotic flow region, i.e., Re = 20 and 40, with vertical split inlets and alternating injection mode. Simulations are conducted for the smallest diffusion constant (
D =
D1) aiming to reveal the actual mixing characteristics based on the chaotic advection. The degree of mixing is quantified for each flow condition and presented along with outlet concentration distributions in
Figure 16.
As given in
Figure 16, the lowest mixing outcomes are obtained when rectangular ridges are employed (i.e., case D). Inlet streams predominantly flow around the central part of the mixing channel (
y = 0) with slight fluctuations in the
z-direction. Fluids, coming from the outer sub-inlets (i.e., red and blue colors at the center of the outlet cross-section), are partially diverted to the gaps at the first inlet. After this point, fluid flow is maintained above the gap area over several mixing elements. A slanting fluid motion is observed towards the center of the mixing channel (
y = 0) around the sixth element, and it is kept until the exit. Therefore, a rather limited distortion occurred in fluid bodies. In the concave position of the semi-circular elements (i.e., case A), inlet streams are largely deflected to the center of the mixing channel (
y = 0) due to inwards curvature of the ridges. As opposed to the convex orientation, fluid volumes are mostly raised at the center of the mixing elements. Later, two symmetrical, leaning flow patterns are followed towards the side channels of the mixing channel. In the meantime, fluids, in the gap regions, followed a path between consecutive ridges and merged with the mainstream, flowing at the center of the mixing channel (
y = 0). Even though a rotational fluid behavior is observed, the alternation rates of fluid bodies are much lower than that of the CSCR micromixer. Meanwhile, baffle-type arrangements mixed the fluids without developing a periodic fluid flow in the mixing channel. Inlet streams are mixed intermittently by the mixing elements, located on the bottom and top floors. Fluid bodies are stretched and deflected depending on the position of the semi-circular elements. In convex and concave positions of the semi-circular ridges, fluid bodies are manipulated similarly by each mixing element as described in the CSCR and A configurations respectively. In the baffle-type setups, however, leaning motions are created in the +
z- and −
z-direction by odd- and even-numbered mixing elements respectively. Although a chaotic fluid flow is also created in the B and C configurations, distortion of fluids is considerably lower than that of the CSCR micromixer.
As shown in this study, the convex alignment of the semi-circular ridges yields a specific, helicoidal-shaped flow pattern. Compared to the alternative configurations, the highest deformation rate of fluid bodies is observed in the CSCR micromixer. The design dynamics develop an effective, chaotic flow state in a flow condition as low as Re = 20. In most cases simulated, well-mixed state of fluids with homogenous concentration distributions is reached in a distance less than 2000 µm as shown in
Figure 14c,d. It should be noted that the effects of several parameters in the CSCR micromixer are also investigated which we do not report in the paper. The dimensions, given for semi-circular ridges (i.e.,
hr,
Dr,
tr, and
lp), are found to be optimum values to yield the maximum mixing efficiency. Further increase or decrease of these parameters, negatively affected the intensity of the rotational fluid motion developed, and therefore the degree of mixing. Besides, double inlet channel has been employed in the CSCR design to be consistent with the CT micromixer. A similar helicoidal-shaped flow is also obtained with a single inlet channel—resulting in higher pressure drop for the same Re condition—positioned in the streamwise direction at the beginning of the mixing channel.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}