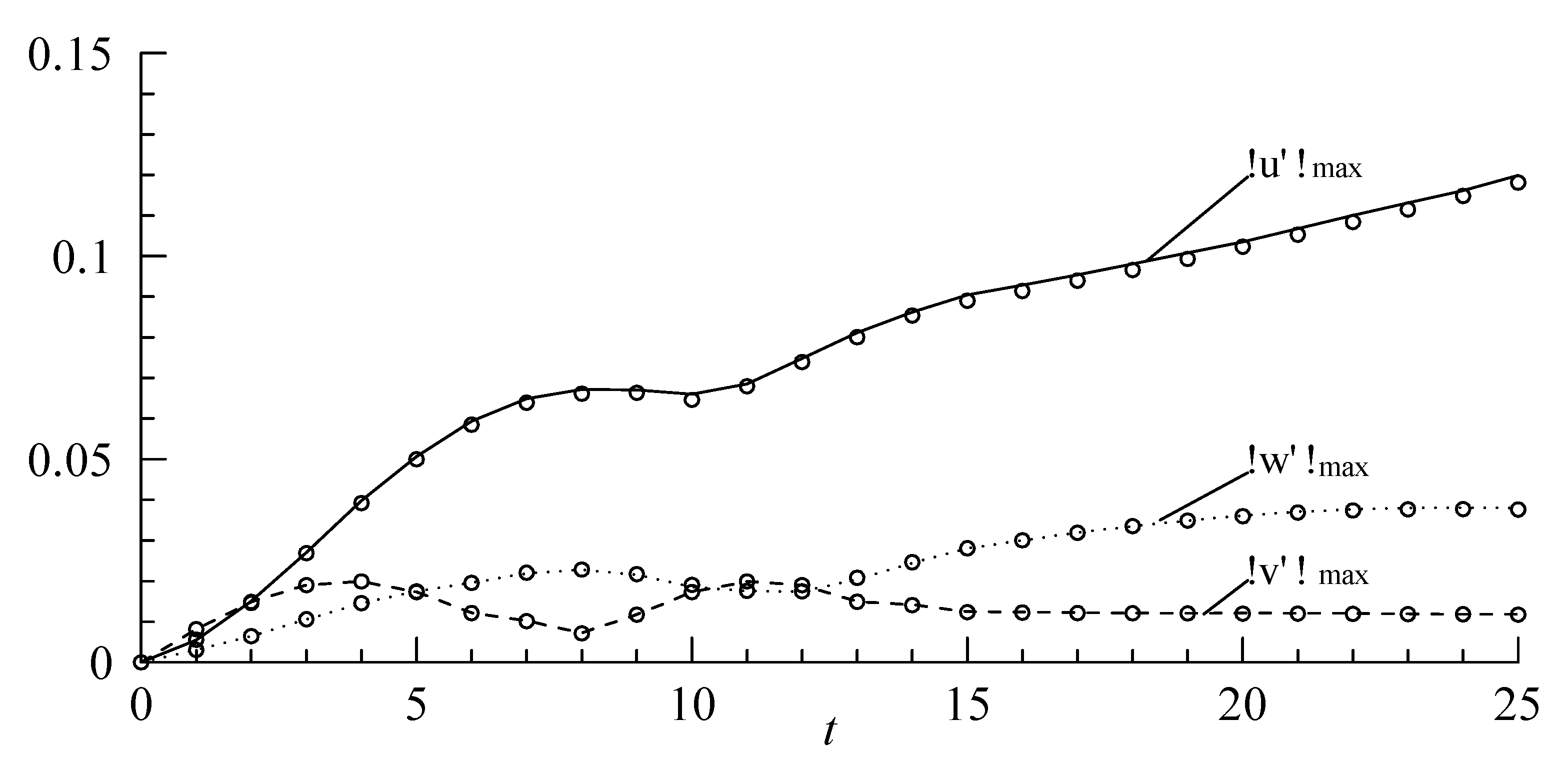
3.1. Disturbance Amplitude of Vortex Structures
Figure 2 shows the evolution of the maximum disturbance amplitude (
) of the vortex structures as they originated from the P–N model and N–P model and propagated downstream in the boundary layer. The maximum disturbance amplitude (
) is defined as
At t = 15, when the wall local forced vibrations stop, the maximum amplitude of vortex structures derived by the P–N and N–P models was almost 0.1, which is obviously much greater than the initial forced vibration amplitude of 0.02. For t < 65, the maximum amplitude of vortex structures derived by the N–P model showed almost no difference compared to that of the P–N model; in this range, the maximum amplitude of the two models gradually rose from 0 to about 0.35. The maximum amplitude of the N–P model was almost unchanged from t = 65 to t = 80, and showed rapid growth for t > 80. On the other hand, however, the maximum amplitude of v using the N–P model obviously showed a rapid growth for t > 65.
It can also be seen from
Figure 3 that the largest contribution to the maximum amplitude was that of
, with
being the stream-wise velocity, while the second and third contributions were those of
and
, respectively. In addition, as
, both
and
increased gradually.
In order to study the reasons for the rapid growth of velocity disturbance in the stream-wise direction, the governing equation for the velocity and pressure disturbances of vortex structures in the
x-direction was written in the following form:
where
,
,
are the components of the velocity of the vortex structures,
is the pressure disturbance, and
and
are the stream-wise and vertical velocity components of the Blasius solution. The various terms appearing in Equation (5) can be grouped in the following form, where
b,
c, and
d are all nonlinear terms,
, and
is the viscous term:
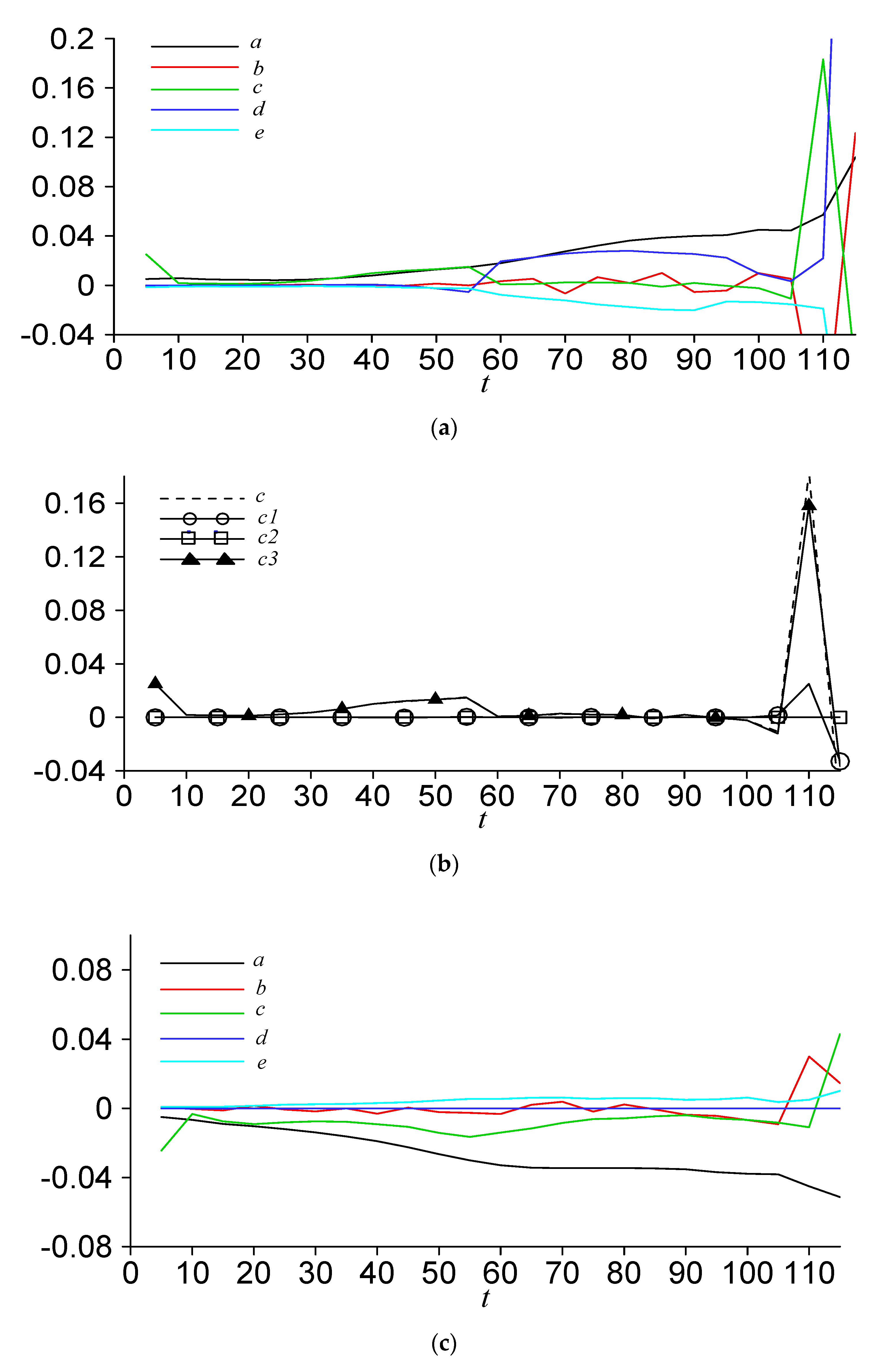
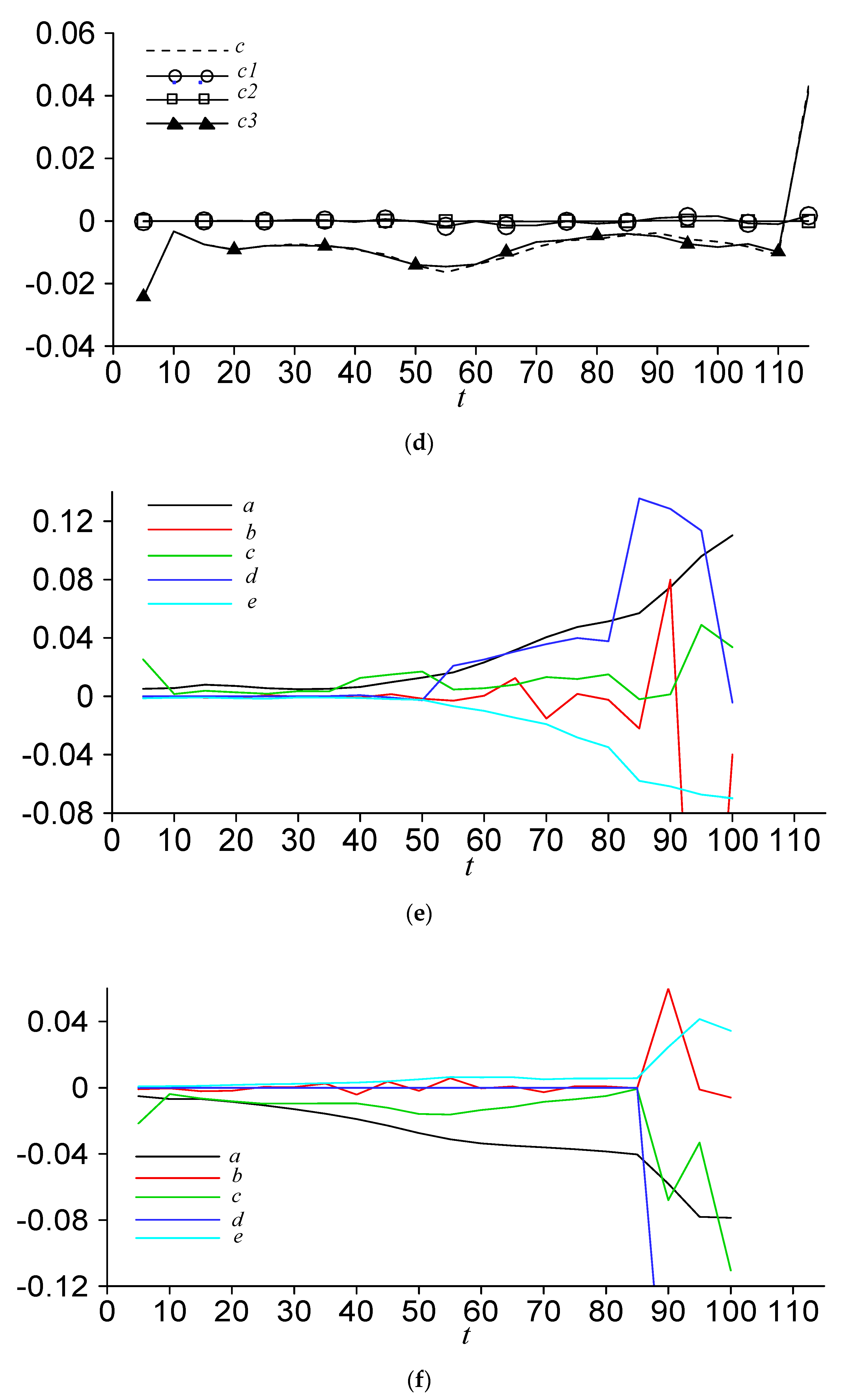
The evolution of grouped terms in time is shown in
Figure 4. In particular,
Figure 4a shows the evolution trends of
a,
b,
c,
d, and
e at the position of maximum stream-wise velocity disturbance with
for the P–N model; the characteristics of
were similar to those shown in
Figure 3a. Compared with the viscous term
e, the nonlinear terms including
b,
c, and
d contributed to the acceleration of the growth of
, while term
b contributed a little. For
t < 55, it can be seen that
c was the most significant term for the disturbance amplitude growth.
Figure 4b shows the evolution trends of
,
,
, and
, whereby
was almost equal to
, as
is the product of
and the mean shear rate of boundary layer
. Since
, vertical velocity disturbance at the position of maximum stream-wise velocity disturbance was of course negative. However, for
t > 55, term
d becomes important for the disturbance amplitude growth; the span-wise disturbance velocity
and the derivative term of the stream-wise disturbance velocity
increase significantly.
Figure 4c shows the evolution trends of
a,
b,
c,
d, and
e at the position of maximum stream-wise disturbance velocity with
for the P–N model.
was less than that in
Figure 3a, which means that the strength of the stream-wise high-speed disturbance velocity was greater than that of the stream-wise low-speed disturbance velocity. Nonlinear terms including
b,
c, and
d can promote further reduction of the stream-wise disturbance velocity, while viscous term
e can prevent it. It can be seen that
c was the most significant term for the disturbance amplitude growth, while term
d seemed unimportant for
with
.
Figure 4d shows the evolution trends of
,
,
, and
, whereby
was almost equal to
, and, due to
, vertical disturbance velocity at the position of maximum stream-wise disturbance velocity was of course positive.
Figure 4e shows the evolution trends of
a,
b,
c,
d, and
e at the position of maximum stream-wise disturbance velocity with
for the N–P model. For
t < 50, it can be seen that
c was the most significant term for the disturbance amplitude growth. Although
in
Figure 4e was greater than that in
Figure 4a, term
d in
Figure 4e rose very fast for
t > 50, which was the main reason for the growth of the vortex structures in the N–P model. It can be inferred that terms
and
of the vortex structures of the N–P model were relatively greater than those of the P–N model.
Compared to
Figure 4c, the stream-wise low-speed disturbance velocity strength of the N–P model shown in
Figure 4f was greater than that of the P–N model. Term
c was the key factor for the growth of low-speed disturbance velocity. In contrast, terms
c and
d were the only important factors for the growth of high-speed disturbance velocity.
3.2. Stripe of Vortex Structures
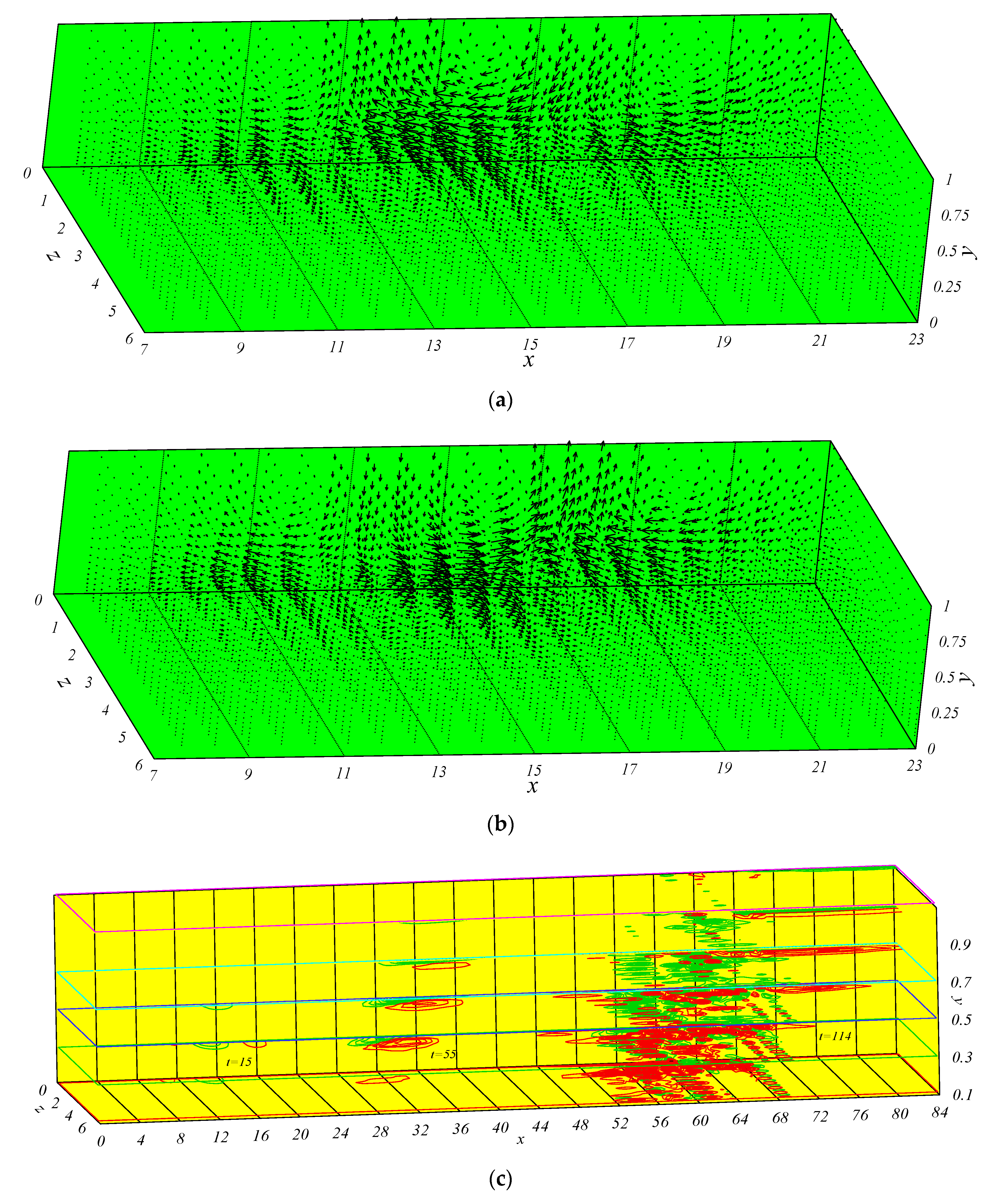
Figure 5a provides the velocity vector of the vortex structures for the P–N model at
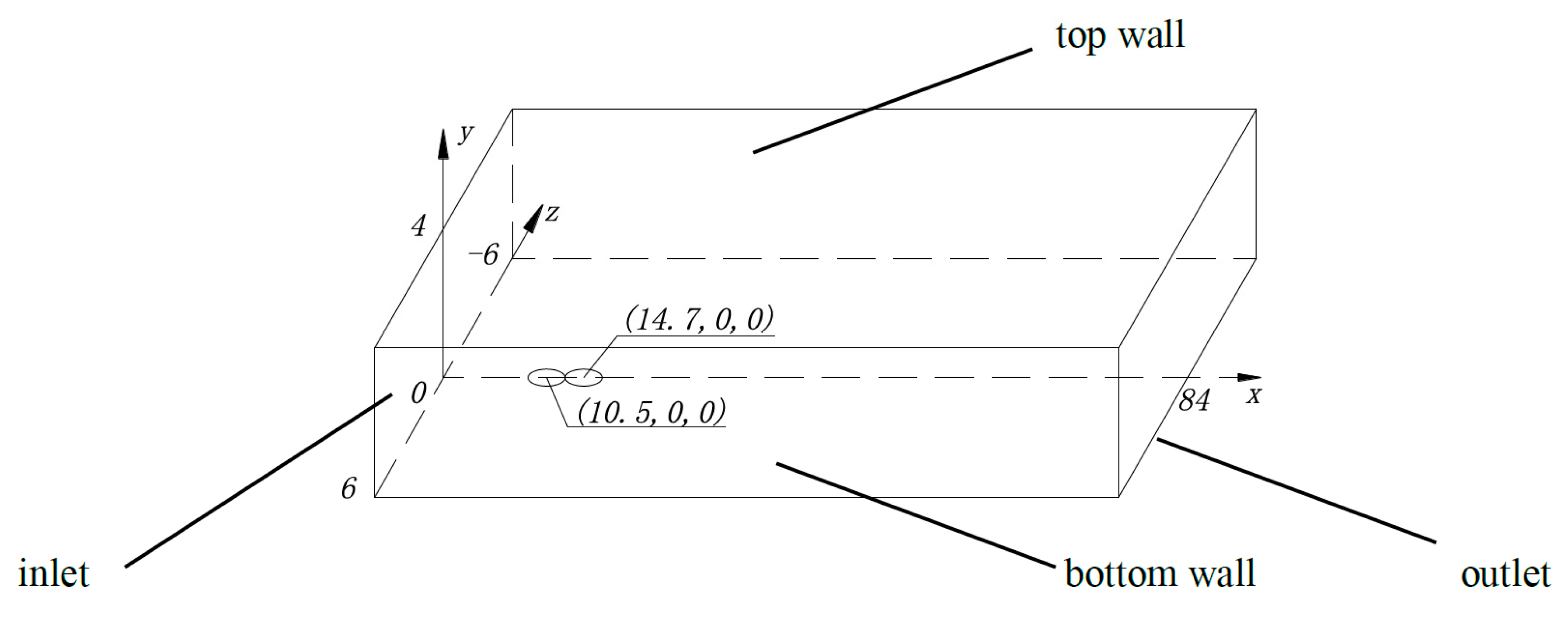
t = 15, when the local micro-vibration at the wall stops. Because the disturbance at the wall was symmetrical along the plane
z = 0, only the results of 0 <
z < 6 are shown. It can be seen that the initial form of the vortex structures was complex, whereby the vortex structures mainly concentrated near
z = 0,
x = 15, and showed complex three-dimensional (3D) vortices in space. The core region of disturbance velocity was at the position of
x > 15 due to the influence of basic flow in the laminar boundary layer.
Figure 5b provides the velocity vector of the vortex structures at
t = 15 of the N–P model. The contrast between
Figure 4a,b shows the opposite nature of the vortices; however, in fact, there were differences in the amplitudes of the velocities. For example, at the position of
x = 18.2,
y = 0.309,
z = 0, the velocities of the P–N model and N–P model are compared in
Table 1.
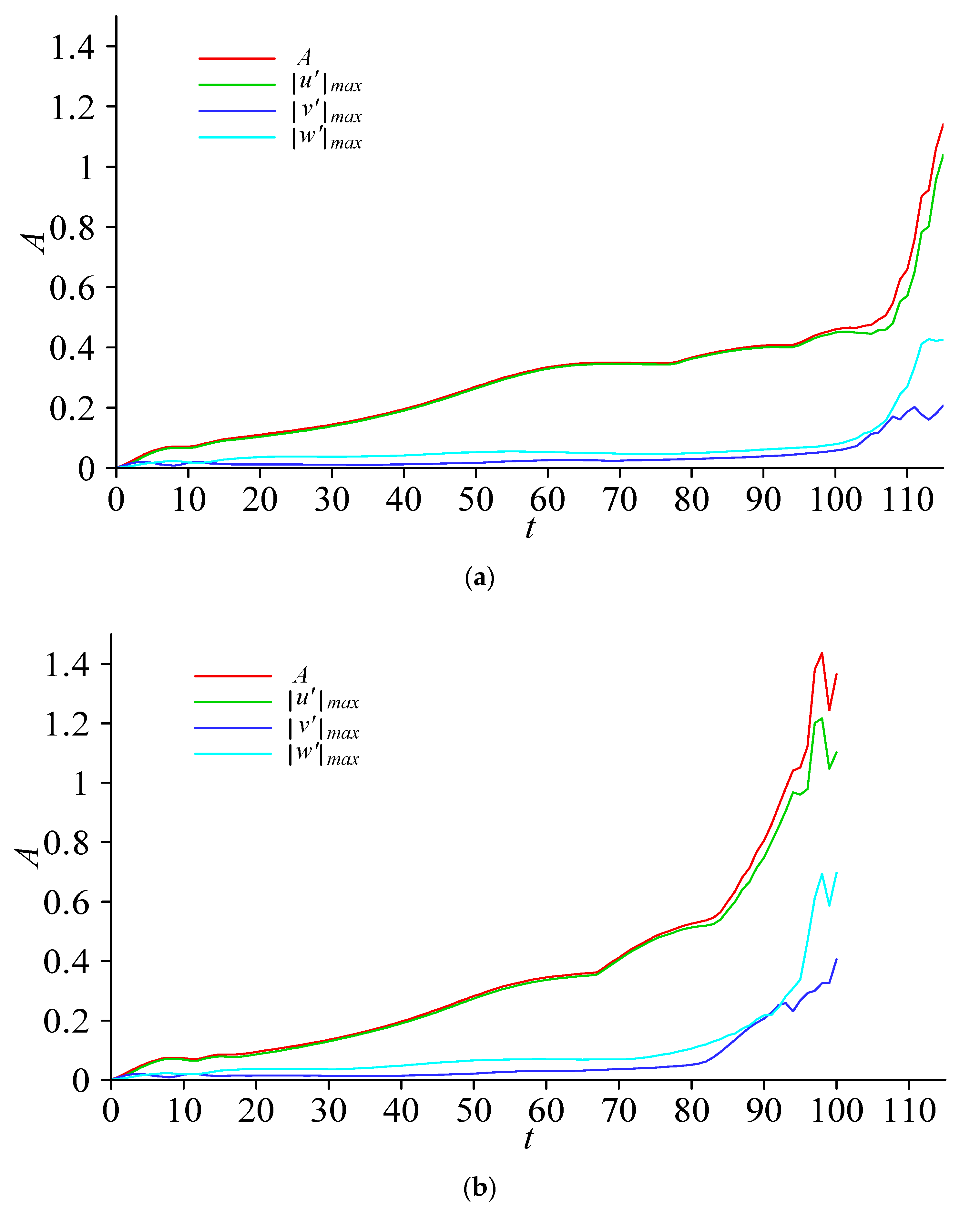
Apart from the different spatial evolution in time, the stream-wise high-speed and low-speed disturbance velocities of different vortex structures exhibited different properties. The vortex structure amplitude of the P–N model increased to about 1.0 at
t = 114, and that of the N–P model increased to about 1.0 at
t = 95.
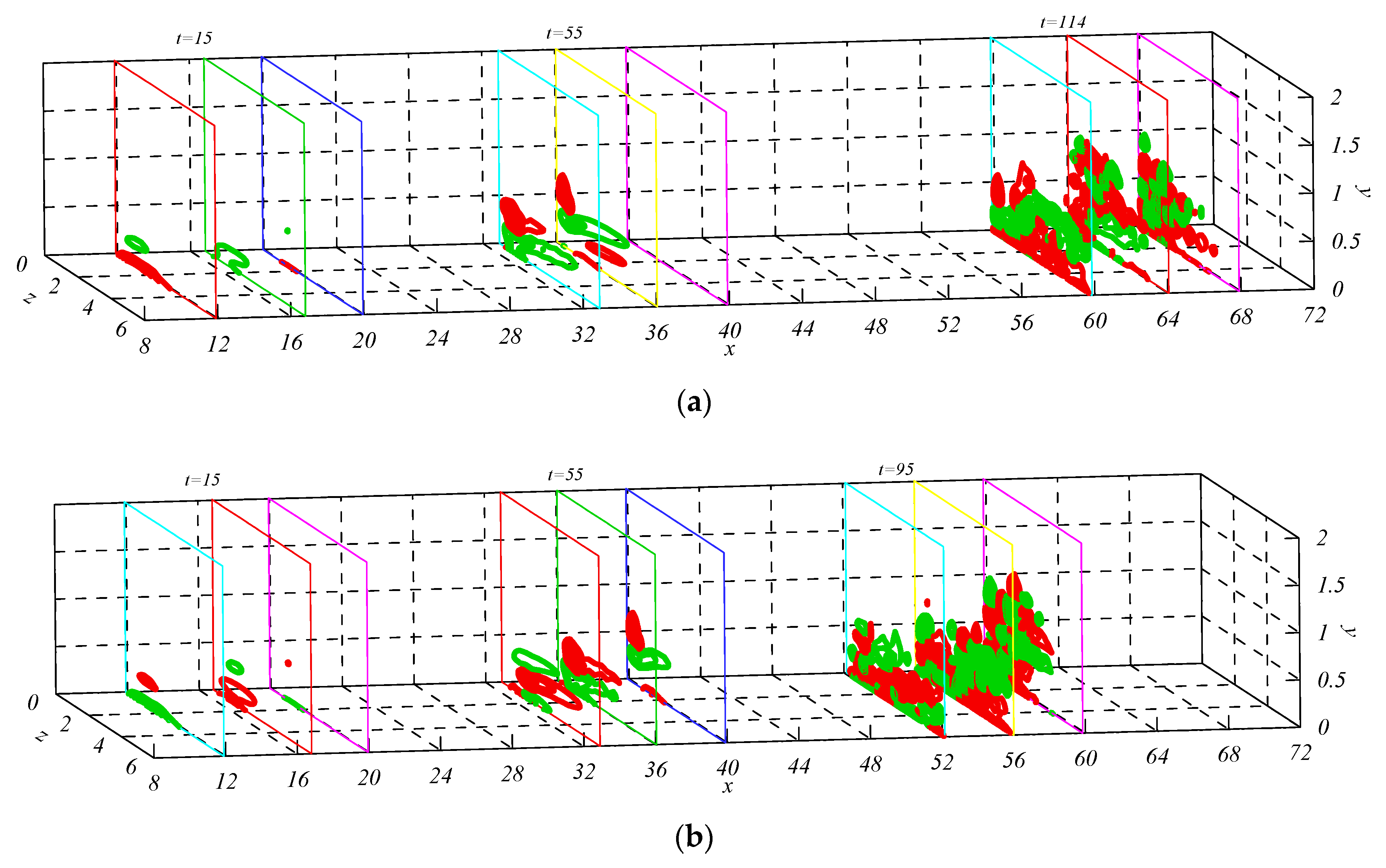
Figure 5c provides the stream-wise disturbance velocity distributions of high-speed and low-speed fluids of the P–N model at
t = 15, 55, and 114, at
y = 0.1, 0.3, 0.5, 0.7, 0.9, and 1.1. Because the vortex disturbances were symmetrically distributed along plane
z = 0, only the contour between planes of
z = 0 and
z = 6 is displayed; the contour increment is 0.03, and red lines represent the disturbance velocity of the high-speed fluid,
. Green lines represent the disturbance velocity of the low-speed fluid,
. At
t = 15, high-speed and low-speed fluids mainly distributed in a local area near
x =16–20,
y = 0.3,
z = 0, and the intensity of the low-speed fluid was greater than that of the high-speed fluid, with the former being below the latter. With the evolution of the vortex structure, at
t = 55, the intensity and area of both the high-speed and low-speed fluids increased, but it seems that the area of the high-speed fluid was larger than that of the low-speed fluid. The low-speed fluid concentrated near the plane of
z = 0, and the high-speed fluid existed in relatively large areas. At
t = 144, the vortex structure was further inclined due to the shear action of the basic flow in the laminar boundary layer. At the same time, it can be seen that the high-speed fluid mainly concentrated near the wall, which may have led to an increase in the friction shear force at the wall region. The area occupied by the high-speed fluid was larger than that occupied by the low-speed fluid. The spatial range of the high-speed fluid increased more than that of the low-speed fluid in all directions.
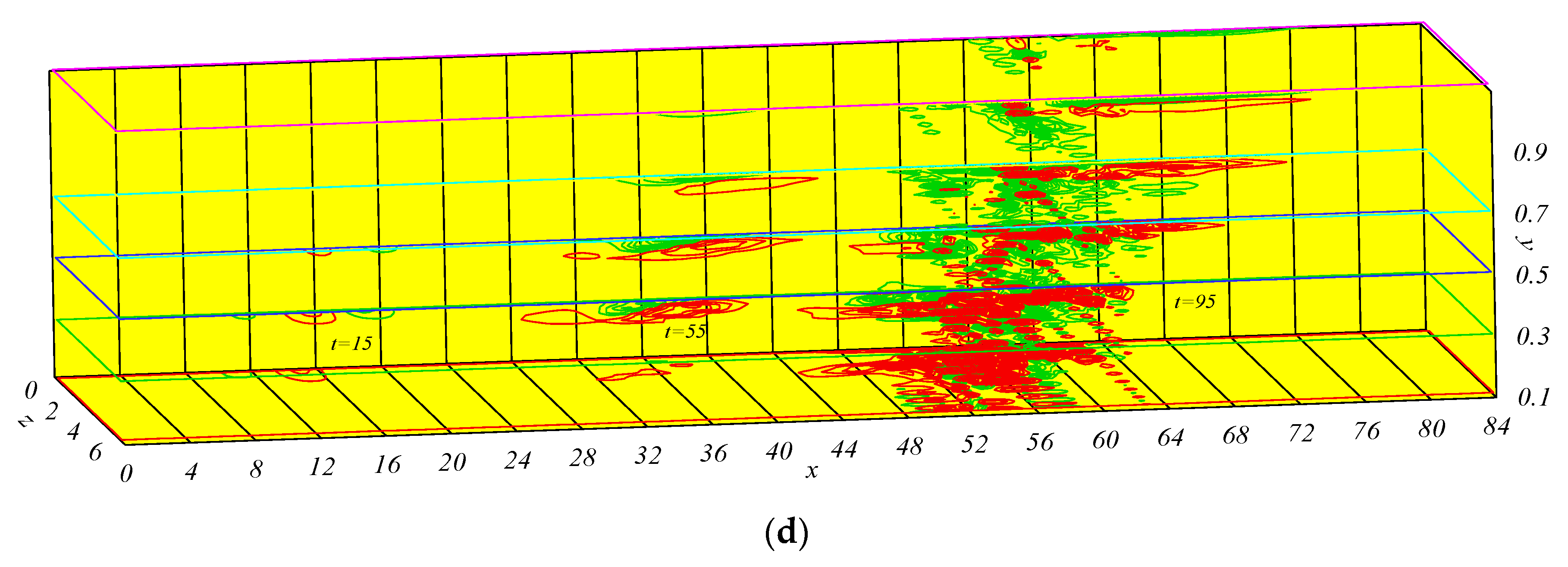
Figure 5d provides the stream-wise disturbance velocity distributions of the high-speed and low-speed fluids of the N–P model at
t = 15, 55, and 114, at
y = 0.1, 0.3, 0.5, 0.7, 0.9, and 1.1. Compared with
Figure 4c, at
t = 15, although the high-speed and low-speed fluids mainly distributed in a small area near
x = 16–20,
y = 0.3,
z = 0, the intensity of the high-speed flow was slightly greater than that of the low-speed flow, while the high-speed fluid was lower than the low-speed fluid. The low-speed fluid main distributed at the location near
y = 0.5 and
x = 20, and there was no high-speed fluid at the same position in
Figure 5c. At
t = 55, the high-speed fluid exceeded the low-speed fluid, and the elongation range of the high-speed fluid in the stream-wise direction was larger than that in
Figure 4c. At
t = 95, the amplitude of vortex structures rose rapidly to nearly 1.0, and the scales of the high-speed fluid and low-speed fluid were smaller than those in
Figure 5c in the stream-wise direction; however, there were mainly high-speed stripes near the wall, and the characteristics of the high-speed fluid occupied a larger area than the low-speed fluid, similar to
Figure 5c. Results of the vortex structure stripe agree with the results of Wall et al. [
12].
The rough center positions of the high-speed and low-speed fluids in the plane of
y = 0.3 of the P–N and N–P models are listed in
Table 2. The forward speed in the stream-wise direction of the P–N model was approximately
, and that of the N–P model was approximately
.
3.3. Mean Flow Profile and Neutral Curve
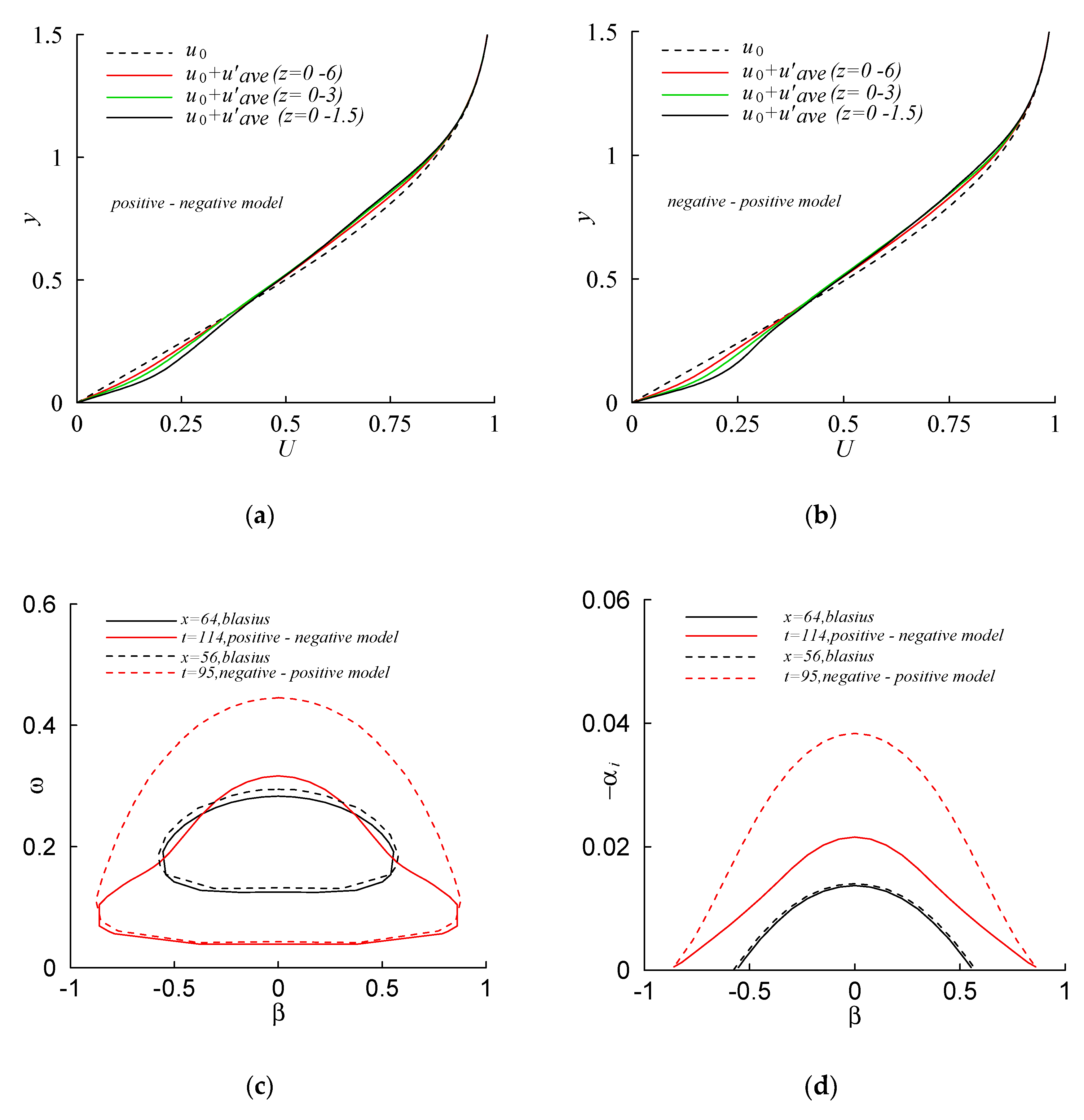
The black dashed lines in
Figure 6a,b represent the velocity
of Blasius basic flow at
x = 64 for the P–N model and at
x = 56 for the N–P model. The red solid lines in
Figure 6a,b represent the mean value of the stream-wise disturbance velocity within a local region adding to Blasius basic flow; the local region was
,
for the P–N model and
,
for the N–P model. As can be seen, the mean velocity profile deformations in the area of the vortex structures could easily be discerned. On one hand, because of the presence of stream-wise disturbance velocity, the shear stress close to the wall increased. On the other hand, under the conditions of different initial disturbances at the walls in the laminar boundary flow, the mean velocity profiles all became plump after a period of evolution. Although vortex structures were only in their initial stages, the velocity profiles had a tendency to evolve into the turbulent mean velocity profiles. Furthermore, the mean velocity profiles were plumper at
, which indicates that the stream-wise high-speed disturbance velocity mainly distributed near the wall region.
The green solid lines in
Figure 6a,b represent the mean value of the stream-wise disturbance velocity within a local scope adding to Blasius basic flow; the local region was
,
for the P–N model and
,
for the N–P model. The black solid lines in
Figure 6a,b represent the mean value of the stream-wise disturbance velocity within a local region adding to Blasius basic flow; the local region was
,
for the P–N model and
,
for the N–P model. It can be seen from
Figure 6a,b that the mean velocity profiles had inflection points in the local scope of
; the flow stability in this scope would, thus, be altered. According to the theory of linear stability, the solution of a three-dimensional T–S wave is obtained by solving the eigenvalue problem of Orr–Sommerfeld equations.
where
is the conjugate complex,
is the stream-wise wave number,
is the real part,
is the imaginary part,
is the span-wise wave number,
is the frequency,
is the initial amplitude,
is the eigenvalue velocity, and
represents the points on the neutral curve. For each span-wise wave number
, the corresponding unstable T–S wave with maximum local growth rate
exists.
T–S waves inside the neutral curve are unstable. The black solid line in
Figure 6c is the neutral curve at
x = 64, and the black dotted line is the neutral curve at
x = 56 in the Blasius boundary layer. The frequency of the neutral curve at
x = 64 was less than that at
x = 56. The red solid line in
Figure 6c is the neutral curve based on the mean value of the stream-wise disturbance velocity added to the Blasius basic flow within the local region
,
of the P–N model. The range of the neutral curve (red solid line) was obviously larger than that of the black solid line. The red dashed line in
Figure 6c is the neutral curve based on the mean value of the stream-wise disturbance velocity added to the Blasius basic flow within the local region
,
of the N–P model. The range of the neutral curve (red dashed line) was obviously larger than that of the black dashed line. Due to the existence of the vortex structures, the neutral curve range of the N–P mode was relatively the largest.
The black solid and dashed lines in
Figure 6d correspond to the maximum local growth rates
at
x = 64 and
x = 56 in the Blasius boundary layer. The red solid line in
Figure 6d is the maximum local growth rate
based on the mean value of the stream-wise disturbance velocity added to the Blasius basic flow within the local region
,
of the P–N model. The amplitude of the maximum local growth rate
of the red solid line was obviously larger than that of the black solid line. The red dashed line in
Figure 6d is the maximum local growth rate
based on the mean value of the stream-wise disturbance velocity added to the Blasius basic flow within the local region
,
of the N–P model. Also, the amplitude of the maximum local growth rate
of the red dashed line was larger than that of the black dashed line. The amplitude of the maximum local growth rate
of the N–P model was relatively the largest. Growth rates of the T–S waves and profile characteristics of the mean flow had the ability to promote each other. The self-sustaining structures in the logarithmic region of the boundary agree with the results obtained by Yang [
11].
3.4. Stream-Wise Vortices
Figure 7a shows the distribution of stream-wise vortices
at different times of
t = 15, 55, and 114 of the P–N model.
Figure 7b shows the distribution of stream-wise vortices
at different times of
t = 15, 55, and 114 of the N–P model. Contours in three section planes at each time are given, and the contour increment was 0.1; the red color denotes
, while the green color denotes
.
The intensity of stream-wise vortices became stronger and stronger with the evolution of vortex structures. Furthermore, different scales of stream-wise vortices came into being, the centers of vortices went up, and the influencing areas gradually diffused, followed by strong ejection and sweeping at the centers of these vortices. In addition, the sizes of stream-wise vortices increased continuously. According to Biot–Savart theory, the vortex tube is lengthened in the stream-wise direction, which amplifies the vortex intensity. At last, both stream-wise and span-wise velocities grow quickly, followed by dramatic ejection and sweeping, the formation of strong shear layers locally, and the flow becoming unstable. However, the main affected area is in the vicinity of the wall, which is the region near the wall where hydrodynamic instability occurs actively. Results of the vortex distribution agree with the research results of Shinneeb et al. [
12].













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}