Integer Programming Scheduling Model for Tier-to-Tier Shuttle-Based Storage and Retrieval Systems

Abstract
:1. Introduction
2. Literature Review
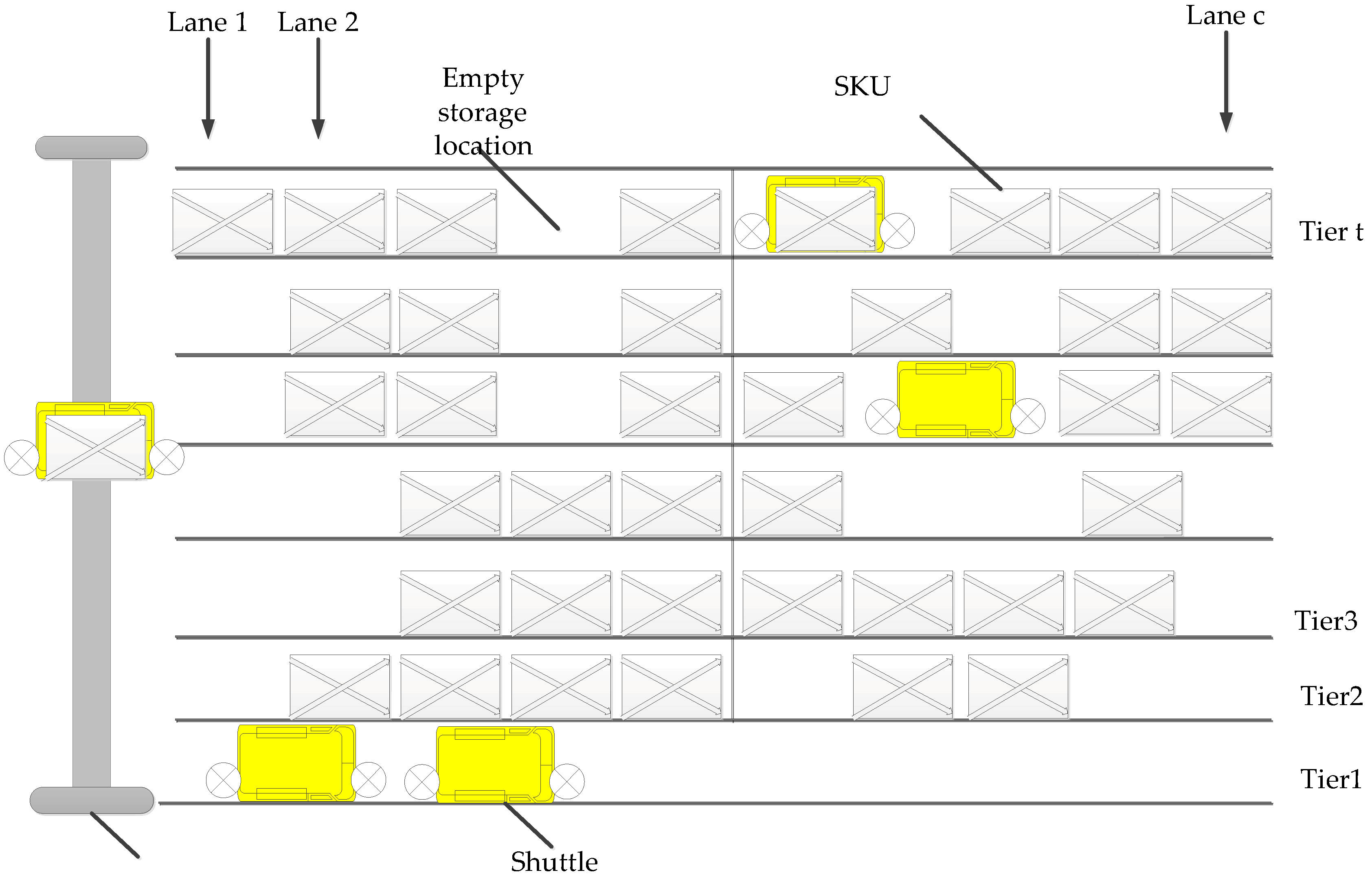
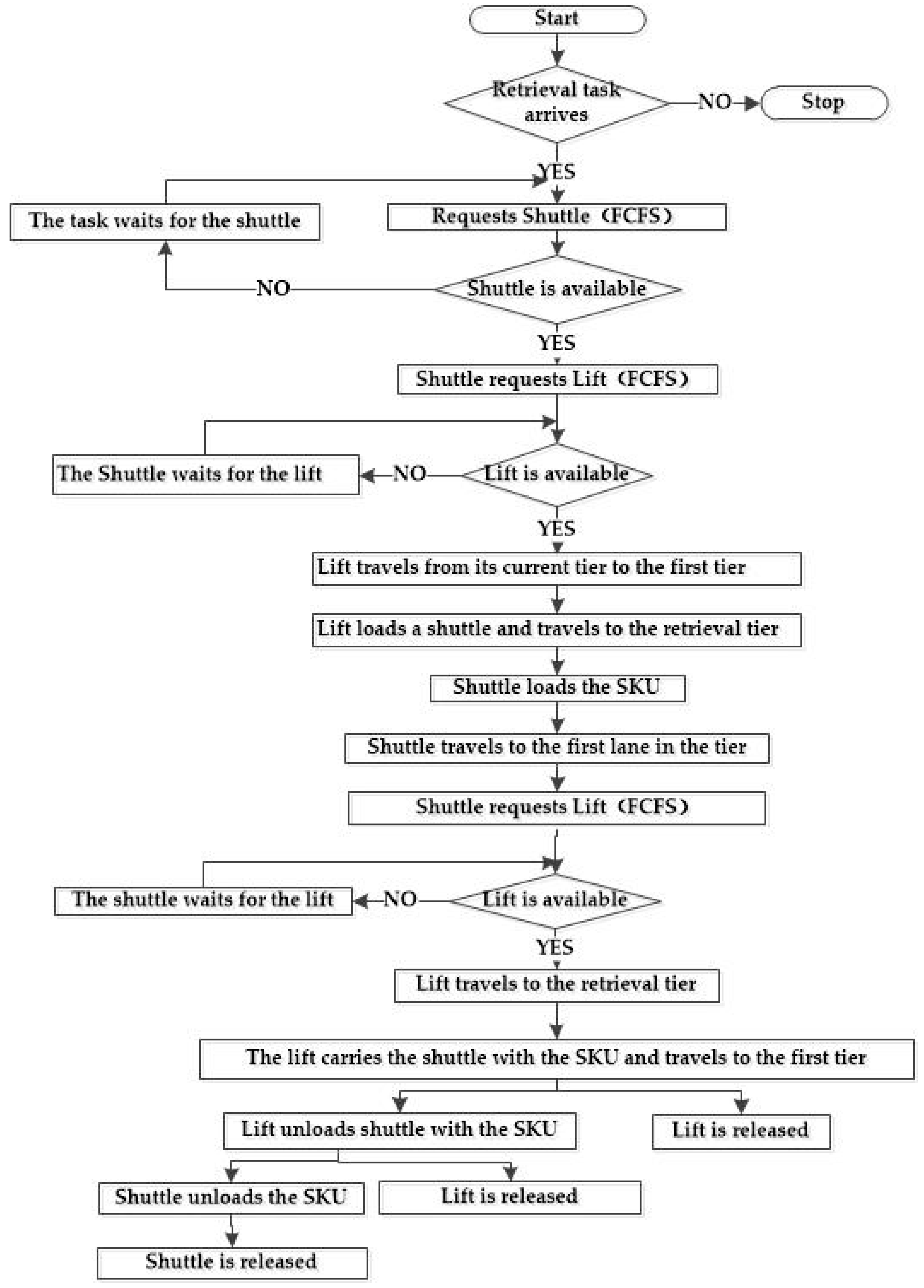
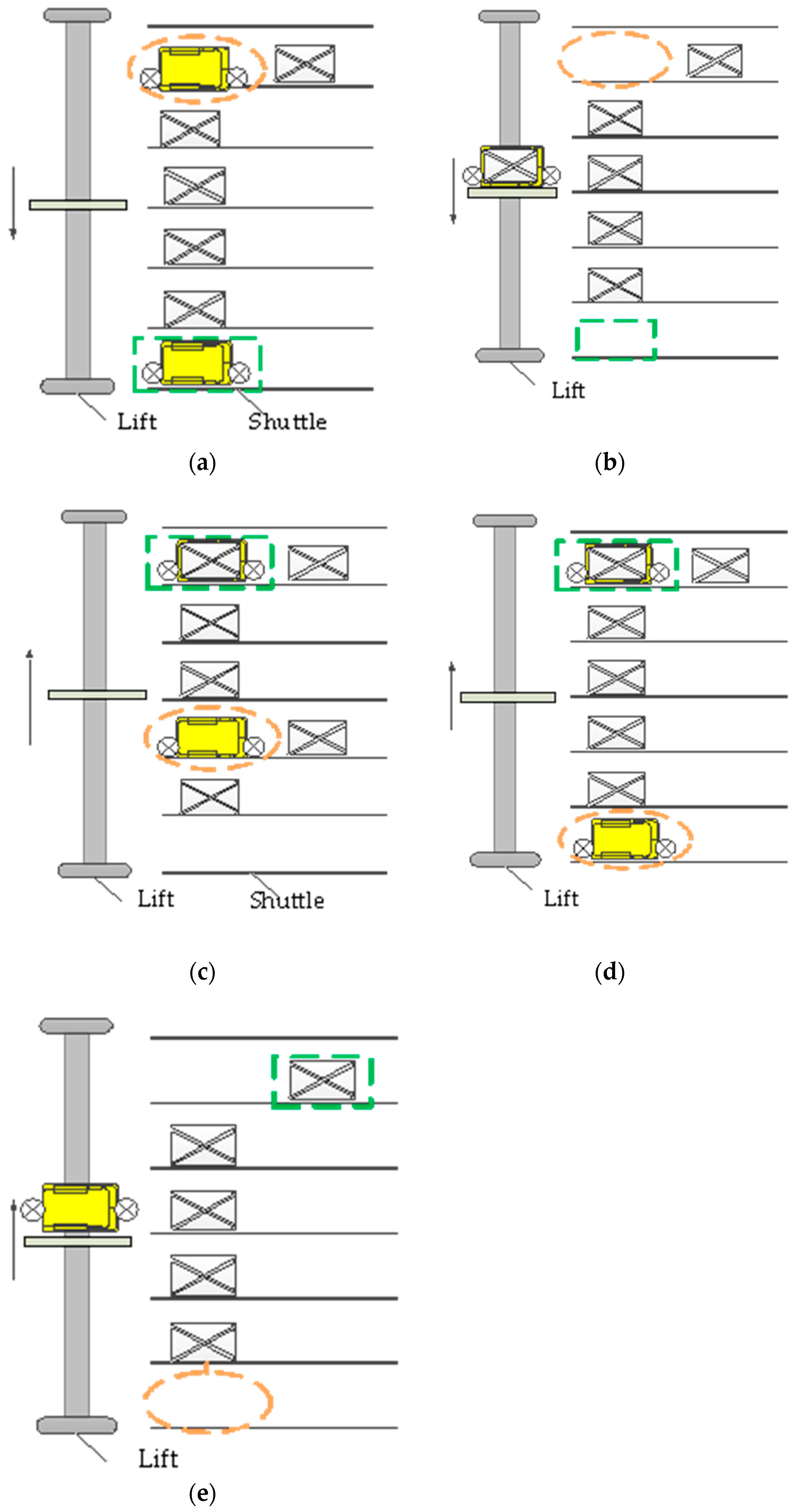
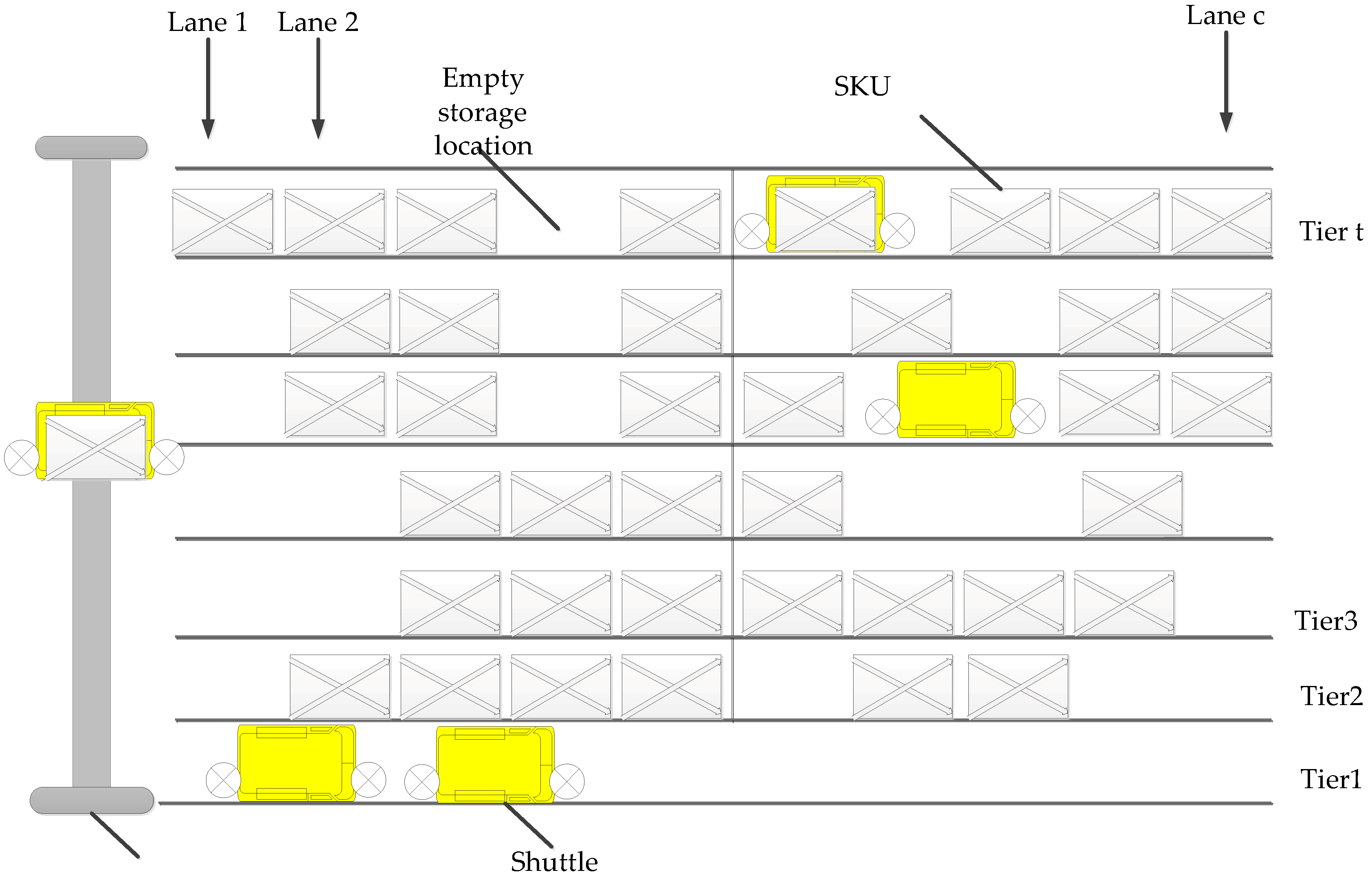
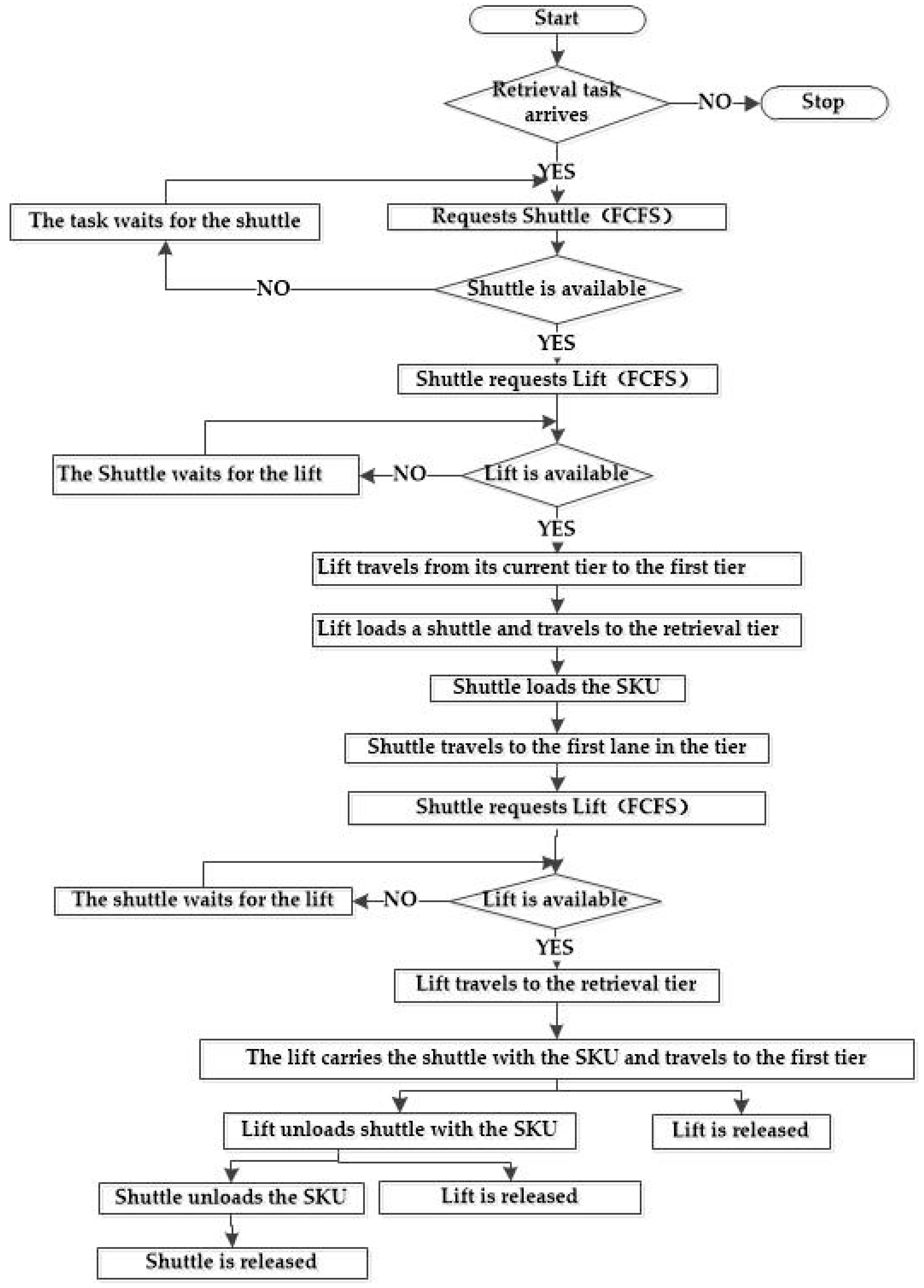
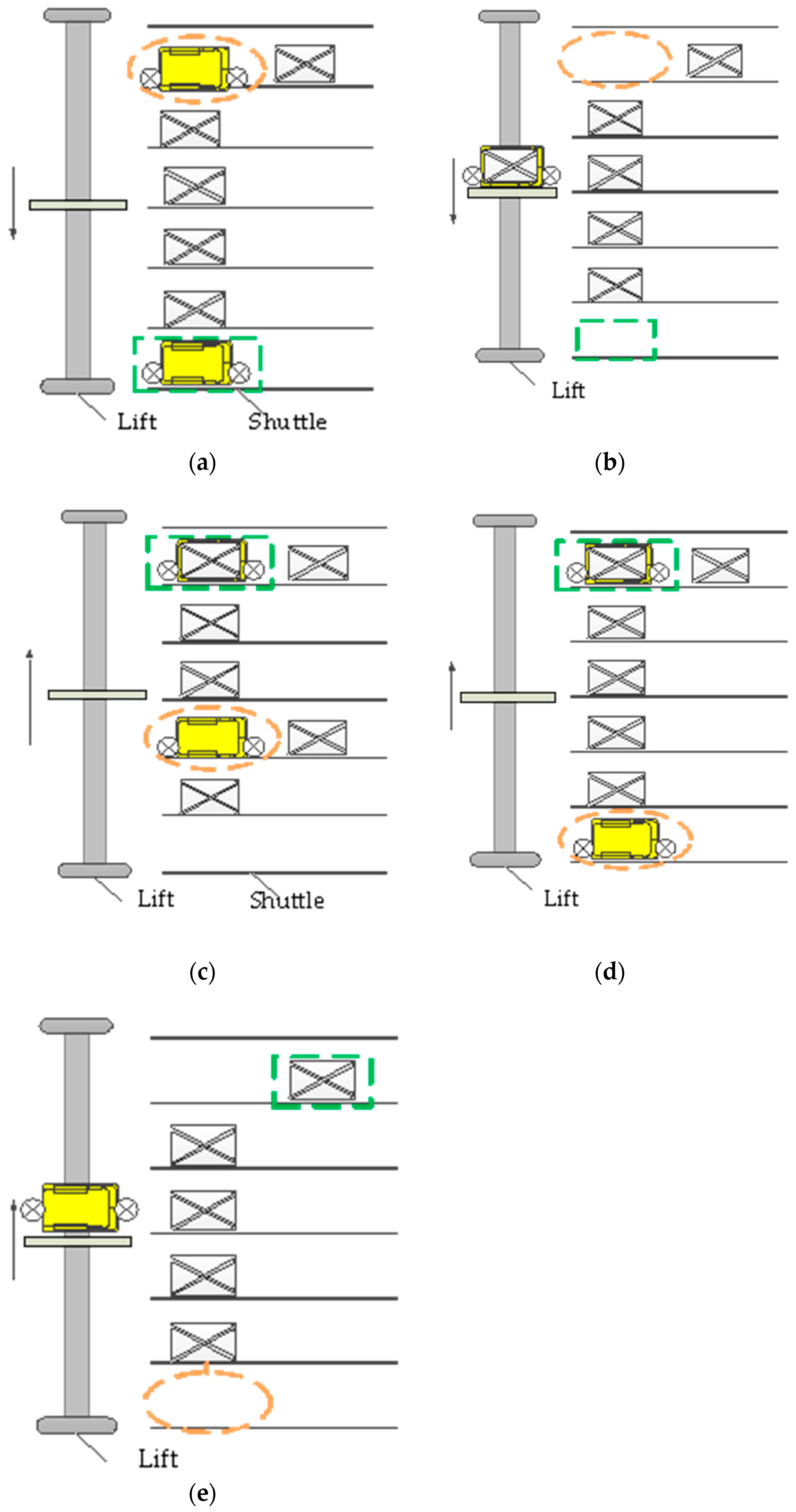
3. System Description
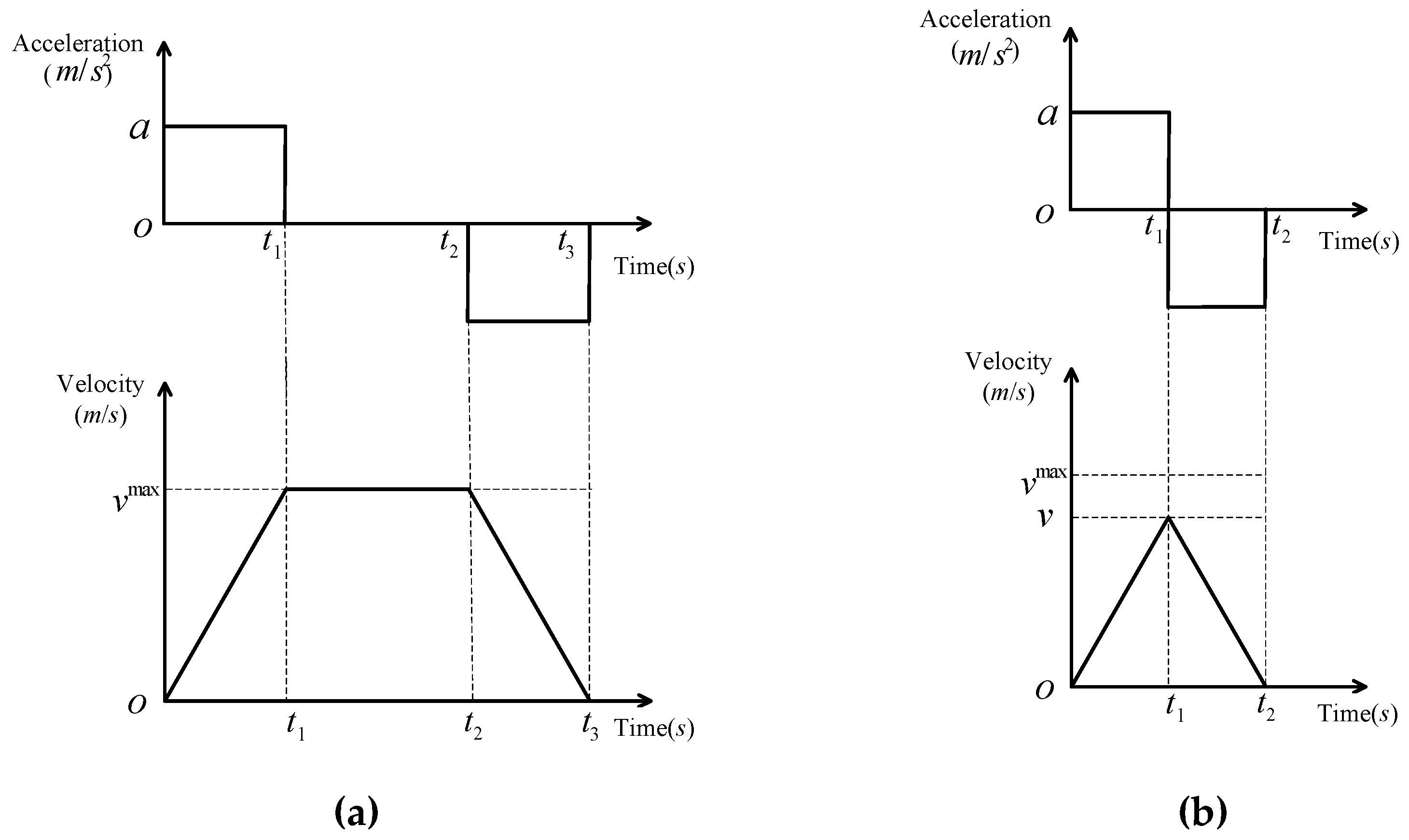
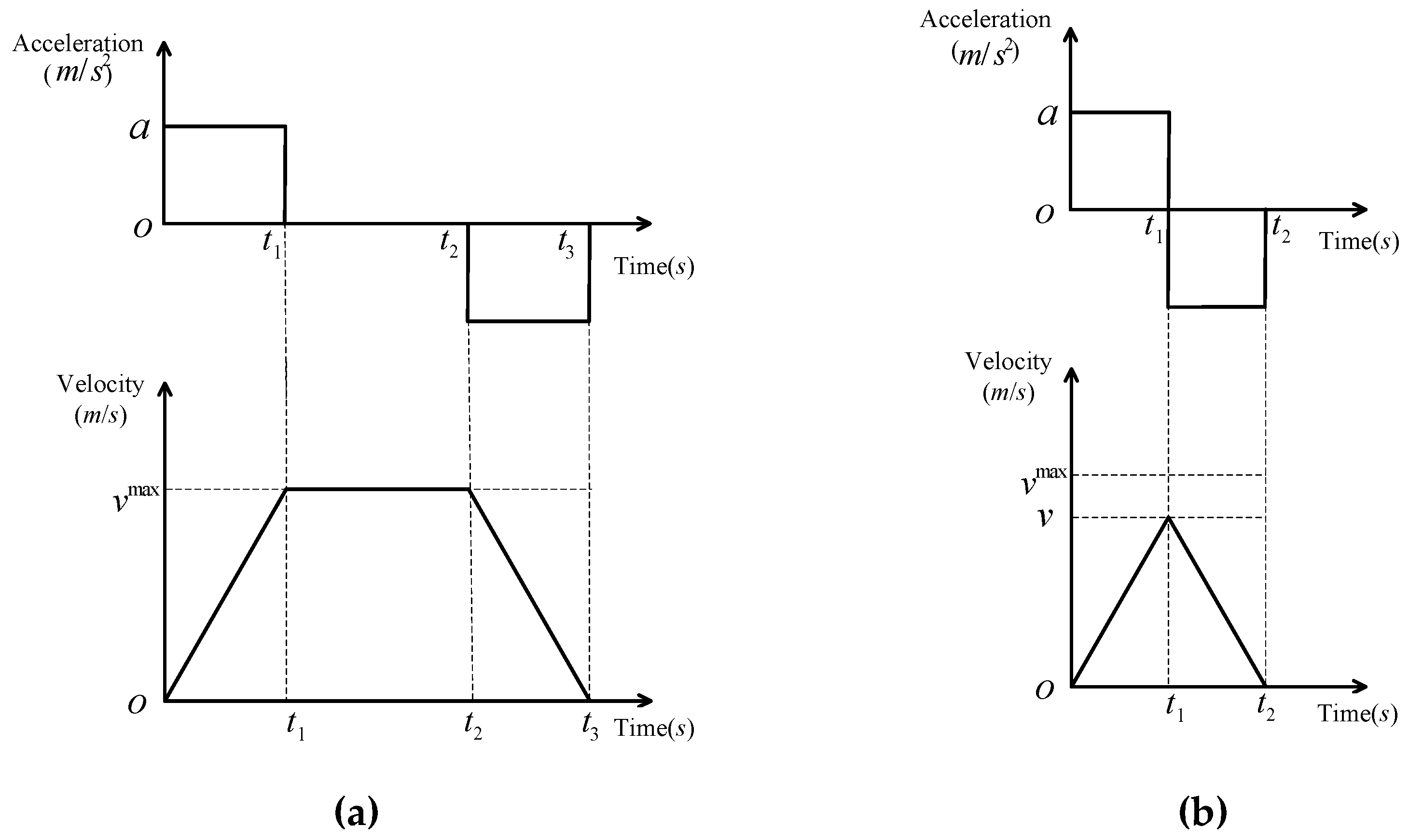
- If shuttles and lifts reach the maximum velocity before deceleration, the operation includes three steps: accelerating from 0 to maximum velocity , traveling at , and decelerating from to 0. The patterns of acceleration and velocity are shown in Figure 4a.
- If shuttles and lifts do not reach the maximum velocity before deceleration, the operation includes two steps: accelerating from 0 to v and decelerating from v to 0. The patterns of acceleration and velocity are shown in Figure 4b.
4. Integer Programming Scheduling Model
- The retrieval SKU can be found in its assigned aisles randomly within a single time window.
- At the beginning of retrieval tasks, all shuttles remain at rest in the buffer area on tier 1. When the first shuttle is in a task with new tasks emerging, the system schedules the second shuttle for the next task, and this pattern is followed for shuttles third through h.
- While a shuttle performs a task in a certain tier, it is forbidden to allow other shuttles to step in since it could lead to deadlock or conflict.
- For retrieval tasks, lifts firstly transport the shuttles to the tier where the tasks is located, then the starting times of the first lift task, first shuttle task, and first retrieval task are set equal to 0.
5. Case Study
6. Conclusions
- This paper only considers retrieval tasks, without considering storage tasks. In practice, SBS/RSs normally perform both storage and retrieval tasks. Besides, under dual cycle command (DCC), methods to model and schedule the SBS/RSs require further research.
- The integer programming scheduling model established here can obtain the optimized result by Gurobi. However, model-solving time will increase as the number of orders increases. Thus, determining the best heuristic algorithm for optimization requires further study.
- The developed automated computing program can be further packaged into software. Then, the decision maker would be able to control the inputs and read the best retrieval sequence. By sending information about the best sequence to the automation device, the automatic system’s efficiency could be improved, and the costs of the warehouse could be cut.
Author Contributions
Funding
Conflicts of Interest
References
- Qiu, Y.; Tao, D. Research on Modeling of AGV Dispatching System in Container Terminal Based on Timed Petri Net. J. Wuhan Univ. Technol. (Transp. Sci. Eng.) 2006, 30, 958–960. [Google Scholar]
- Li, S.; Wang, C. An Optimal Method of Finding Routing Orderpickers in Distribution Centers Using Dynamic Programming. Oper. Res. Manag. Sci. 2003, 12, 117–121. [Google Scholar]
- Li, S.; Du, W.; Peng, Q. Research on Routing Policies of Low-level Fixed-rack Warehouse. Hoisting Convey. Mach. 2007, 8, 5–9. [Google Scholar]
- Liu, J. The Research on Routing Method Selection for an Order Picking System in the Distribution Center. Oper. Res. Manag. Sci. 2010, 11, 179–183. [Google Scholar]
- D’Andrea, R. A Revolution in the Warehouse: A Retrospective on Kiva Systems and the Grand Challenges Ahead. IEEE Trans. Autom. Sci. Eng. 2012, 9, 638–639. [Google Scholar] [CrossRef]
- Zhang, W.; Feng, X.; Zhao, J.; Lu, E.; Li, Y. The task allocation for improved fitness-based heterogeneous multi-robot. J. Northwest Univ. (Nat. Sci. Ed.) 2013, 43, 22–26. [Google Scholar]
- Yang, H.; Li, X.; Zhong, M. Research on Optimal Path in AS/RS Orderpicking Operation Allocation. Hoisting Convey. Mach. 2005, 3, 23–26. [Google Scholar]
- Shiau, J.Y.; Lee, M.C. A warehouse management system with sequential picking for multi-container deliveries. Comput. Ind. Eng. 2010, 58, 382–392. [Google Scholar] [CrossRef]
- Cheng, Y. Research on Modelling and Optimization of AS/RS Orderpicking Operation Allocation. Master’s Thesis, University of Xiamen, Xiamen, China, 2009. [Google Scholar]
- Li, C. Research on Scheduling Optimization of Automated Warehouse Based on PSO. Master’s Thesis, Shaanxi University of Science and Technology, Xian, China, 2015. [Google Scholar]
- Kumar, V. Hybrid TSSA algorithm-based approach to solve warehouse-scheduling problems. Int. J. Prod. Res. 2009, 47, 919–940. [Google Scholar]
- Tian, G.; Zhang, P.; Li, X.; Yin, J.; Lu, F. Research on One Class of Optimization Problem of the Automated Warehouse Using a New Kind of Hybrid Genetic Algorithm. J. Syst. Simul. 2004, 16, 1198–1201. [Google Scholar]
- Zou, B.; Xu, X.H.; Gong, Y.; Koster, R.D. Modeling parallel movement of lifts and vehicles in tier-captive vehicle-based warehousing systems. Eur. J. Oper. Res. 2016, 254, 51–67. [Google Scholar] [CrossRef]
- Wang, Y.; Mou, S.; Wu, Y. Task scheduling for multi-tier shuttle warehousing systems. Int. J. Prod. Res. 2015, 53, 5884–5895. [Google Scholar] [CrossRef]
- Kulak, O.; Taner, M.E. Joint order batching and picker routing in single and multiple-cross-aisle warehouses using cluster-based tabu search algorithms. Flex. Serv. Manuf. J. 2012, 24, 52–80. [Google Scholar] [CrossRef]
- Mou, S. Modelling and Optimization in Shuttle-based Storage and Retrieval System. Master’s Thesis, University of Shandong, Jinan, China, 2013. [Google Scholar]
- Li, J.; Huang, R.; Dai, J.B. Joint optimisation of order batching and picker routing in the online retailer’s warehouse in China. Int. J. Prod. Res. 2017, 55, 447–461. [Google Scholar] [CrossRef]
- Ekren, B.Y.; Sari, Z.; Lerher, T. Warehouse Design under Class-Based Storage Policy of Shuttle-Based Storage and Retrieval System. Ifac Pap. 2015, 48, 1152–1154. [Google Scholar] [CrossRef]
- Lerher, T.; Ekren, B.Y.; Dukic, G.; Rosi, B. Travel time model for shuttle-based storage and retrieval systems. Int. J. Adv. Manuf. Technol. 2015, 78, 1705–1725. [Google Scholar] [CrossRef]
- Lerher, T.; Ekren, Y.B.; Sari, Z.; Rosi, B. SIMULATION ANALYSIS OF SHUTTLE BASED STORAGE AND RETRIEVAL SYSTEMS. Int. J. Simul. Model. (Ijsimm) 2015, 14, 48–59. [Google Scholar] [CrossRef]
- Lerher, T. Travel time model for double-deep shuttle-based storage and retrieval systems. Int. J. Prod. Res. 2016, 54, 1–22. [Google Scholar] [CrossRef]
- Ning, Z.; Lei, L.; Zhang, S.; Lodewijks, G. An efficient simulation model for rack design in multi-elevator shuttle-based storage and retrieval system. Simul. Model. Pract. Theory 2016, 67, 100–116. [Google Scholar] [CrossRef]
- Ekren, B.Y. Graph-based solution for performance evaluation of shuttle-based storage and retrieval system. Int. J. Prod. Res. 2017, 55, 1–11. [Google Scholar]
- Lerher, T. Design of Experiments for Identifying the Throughput Performance of Shuttle-Based Storage and Retrieval Systems. Procedia Eng. 2017, 187, 324–334. [Google Scholar] [CrossRef]
- Borovinšek, M.; Ekren, B.Y.; Burinskienė, A.; Lerher, T. Multi-objective optimisation model of shuttle-based storage and retrieval system. Transport 2017, 32, 1–18. [Google Scholar] [CrossRef]
- Ha, Y.; Chae, J. Free balancing for a shuttle-based storage and retrieval system. Simul. Model. Pract. Theory 2018, 82, 12–31. [Google Scholar] [CrossRef]
- Lerher, T.; Sraml, M.; Kramberger, J.; Potrc, I.; Borovinsek, M.; Zmazek, B. Analytical travel time models for multi aisle automated storage and retrieval systems. Int. J. Adv. Manuf. Technol. 2006, 30, 340–356. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition | Unit |
|---|---|---|
| Width of a single storage location | m | |
| h | Height of a single storage location | m |
| The maximum horizontal velocity of the shuttle | m/s | |
| The maximum vertical velocity of the lift | m/s | |
| The horizontal acceleration/deceleration of the shuttle | m/s2 | |
| The vertical acceleration/deceleration of the lift | m/s2 | |
| tS | The time for the shuttle to load or unload a SKU | s |
| tL | The time for the lift to load or unload a shuttle in | s |
| Tlift | Time of the picking and delivery of lifts | s |
| Parameter | Definition | Unit |
|---|---|---|
| The number of outbound orders | number | |
| The number of shuttles | number | |
| Total number of missions of shuttles (i.e., 20) | number | |
| The number of columns of storage racks | number | |
| Scale constant | number | |
| The number of rows of storage racks | number | |
| The number of retrieval tasks in tier i | number | |
| Combination of retrieval tasks on tier i in the number of columns | number | |
| The number of tasks for shuttle h | number |
| Variable | Definition | Unit |
|---|---|---|
| Starting time of performing lift task m | s | |
| If task m is the retrieval task of tier i with conveying the loading shuttle, then the value is 1; otherwise, 0 | ||
| If task m is the retrieval task of tier i with conveying the idle shuttle, then take value 1; otherwise, 0 | ||
| If retrieval task s in tier i is also in column 1, then take value 1; otherwise, 0 | ||
| Start time of task s in tier i | s | |
| End time of task s in tier i | s | |
| If lift task m is the retrieval task s for a particular tier, then take value 1; otherwise, 0 | ||
| Waiting time for lifts in column 1 after picking | s | |
| Starting time of task t for shuttle h | s | |
| If it is task t for shuttle h, then take value 1; otherwise, 0 | ||
| If task t is task s in tier i for a shuttle, then take value 1; otherwise, 0 |
| Scenario | Number of Positions | Number of Tiers | Number of Columns | Number of Tasks | Number of Shuttles |
|---|---|---|---|---|---|
| A | 1200 | 11 | 60 | 30 | 4 |
| B | 1600 | 11 | 80 | 30 | 4 |
| C | 2000 | 11 | 100 | 30 | 4 |
| D | 960 | 9 | 60 | 30 | 3 |
| E | 1280 | 9 | 80 | 30 | 3 |
| F | 1600 | 9 | 100 | 30 | 3 |
| Parameter | Value |
|---|---|
| Height of each rack | 0.6 m |
| Width of each rack | 0.5 m |
| Maximum horizontal velocity of shuttles | 2 m/s |
| Maximum vertical velocity of lifts | 3 m/s |
| Horizontal acceleration or deceleration of shuttles | 1 m/s2 |
| Vertical acceleration or deceleration of lifts | 2 m/s2 |
| Storage or retrieval time of shuttles | 4.5 s |
| Taking or returning time of lifts | 3 s |
| Task Cycle Time (s) | |||||||
|---|---|---|---|---|---|---|---|
| Random Sequence | Model Result | Optimized Percentage | |||||
| 1 | 2 | 3 | 4 | Average | |||
| A | 559.99 | 542.96 | 560.17 | 553.00 | 554.03 | 490.79 | 12.89% |
| B | 584.65 | 571.78 | 586.94 | 568.33 | 577.93 | 527.23 | 9.62% |
| C | 602.90 | 551.72 | 592.92 | 578.78 | 581.58 | 532.06 | 9.31% |
| D | 566.30 | 584.51 | 537.04 | 568.52 | 564.09 | 508.16 | 11.01% |
| E | 539.70 | 541.81 | 559.93 | 559.93 | 550.34 | 513.35 | 7.21% |
| F | 583.47 | 539.94 | 558.16 | 556.09 | 559.41 | 521.18 | 7.34% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Wang, Y.; Wang, Y.; Huang, K. Integer Programming Scheduling Model for Tier-to-Tier Shuttle-Based Storage and Retrieval Systems. Processes 2019, 7, 223. https://doi.org/10.3390/pr7040223
Zhao X, Wang Y, Wang Y, Huang K. Integer Programming Scheduling Model for Tier-to-Tier Shuttle-Based Storage and Retrieval Systems. Processes. 2019; 7(4):223. https://doi.org/10.3390/pr7040223
Chicago/Turabian StyleZhao, Xiaofeng, Yanyan Wang, Yunge Wang, and Ke Huang. 2019. "Integer Programming Scheduling Model for Tier-to-Tier Shuttle-Based Storage and Retrieval Systems" Processes 7, no. 4: 223. https://doi.org/10.3390/pr7040223
APA StyleZhao, X., Wang, Y., Wang, Y., & Huang, K. (2019). Integer Programming Scheduling Model for Tier-to-Tier Shuttle-Based Storage and Retrieval Systems. Processes, 7(4), 223. https://doi.org/10.3390/pr7040223