Here, the findings from the gas path modelling and diagnostics, and their inferences are elaborated in detail. At first, the modelling error are presented against the performance test results of a commercial MGT unit. Thereafter, the proposed diagnostics scheme is demonstrated by formulating different case studies, which is complemented by sensitivity studies for different measurement uncertainties, i.e., sensor noise and bias.
4.1. Gas Path Modelling
In
Table 4, the model outputs at nominal load are compared with the corresponding values from performance test results of a commercial scale MGT unit. As it can be seen, the simulated model have acceptable accuracy at the nominal load. It is important to note that the diagnostics scheme tested in this paper is applied only at nominal load.
The model outputs for three other off-design points at part-load are also compared with the performance test results. The comparison results are presented in
Figure 4 as percentage error. It can be observed that the speed (
N) and the turbine outlet temperature (
) give zero error. This is in-line with the matching scheme described in
Section 3.1.1, where
N and
are used as target variables. The error in shaft power (PWX) becomes positive and then negative as the power moves from nominal value to part-load. The shaft power was not available directly from the performance test, and it was calculated from the electrical power output. Assumptions were made about auxiliary power consumption, generator efficiency, and inverter efficiency, these can be contributed to the mismatch between simulated and experimental data.
The error in the compressor outlet pressure () increases as power decreases. The compressor and turbine maps used here are the maps supplied by the turbocharger manufacturer; hence, they are not corrected for the modifications performed to the turbine and compressor. This might explain some of the errors in off-design operating points including . Finally, the recuperator effectiveness was assumed to be constant over entire operating range. This could potentially be responsible for error in recuperator cold side outlet temperature (). Overall, the results demonstrate a sufficient agreement between the simulation results with the performance test results for off-design operating points.
4.2. Diagnostics
To demonstrate the diagnostics scheme described in
Section 3.3, two sets of case studies were formulated: one with only single faults occurring one at a time, and the other with multiple faults occurring concurrently. For the first set (
to
), faults listed in
Table 3 are considered, but the fault magnitudes are assumed to be 1.5% instead of 1% as used for the signature database. The results from the AnSyn step and the signature-based algorithm are presented below.
In
Figure 5, the location and magnitude of all the single faults except the flow leakage and the shaft loss can be detected in the AnSyn step. This can be explained by looking at the matching scheme used for gas path component diagnostics as elaborated in
Section 3.1.2. The modified Jacobian matrix (
Table 2) includes performance deltas and their corresponding measurement pairs for the compressor, the turbine and the recuperator. However, there are no target-state pairs considered for the flow leakage and the shaft loss. This necessarily means that these faults will be detected during the AnSyn as multiple performance deviations. In these cases, in the AnSyn an equivalent fault is created by distributing the fault effects among other performance deltas that are included in the matching scheme. Alongside, the flow leakage and the shaft loss only affect turbine and recuperator deltas. This is because the GPA measurements corresponding to the compressor deltas are not affected by these two faults. However, due to the measurement uncertainties, compressor deltas are also expected to be affected marginally in reality.
It should be noted here that the AnSyn detects general performance deviations in all fault cases, without identifying the cause of the deviation. In some cases, deviations in efficiency and flow capacity can be directly related to a specific fault (e.g., compressor fouling or turbine erosion or recuperator fouling), while other faults such as flow leakage or additional shaft loss cannot be directly linked to the results from the AnSyn. Hence, a second step based on signature correlation is necessary. In reality, occurring faults will always have effect on more than one delta (e.g., compressor fouling reduces both efficiency and flow), but all the faults will correspond to deviations in the five performance parameters here presented, making AnSyn effective for fault detection. For consequent fault isolation and identification, without the need of increasing the number of required measurements, a second layer of fault diagnostics is applied. This second layer is the signature-based algorithm that includes correlation and regression analysis for fault localization and magnitude quantification respectively.
Table 5 shows the correlation coefficients between exchange rates and signatures for case studies with single fault. It is found that, for all the cases, the maximum correlation coefficient always leads to correct location of the fault and thus is placed diagonally in the table. One observation from this study is that the faults corresponding to turbine isentropic efficiency loss and shaft loss have very close correlation coefficients, as red numbers in
Table 5. This is quite obvious, since for a fixed turbine pressure ratio, both parameters highly depend on the ratio between actual isentropic enthalpy drop across turbine. However, a better decision about the fault location can be made by merging results from AnSyn and correlation steps.
Once the location of the fault is known, linear regression is applied to get the magnitude of the corresponding fault. Fault magnitudes estimated by the linear regression for the single faults cases are listed in
Table 6. It is observed that linear regression resulted in faults magnitude that is very close to the actual simulated faults.
The second set of case studies (
to
) that includes multiple faults are listed in
Table 7. The magnitudes of the faults are chosen between 1% and 1.5% so that the combination is different from the signature database where all the faults are 1% in magnitude.
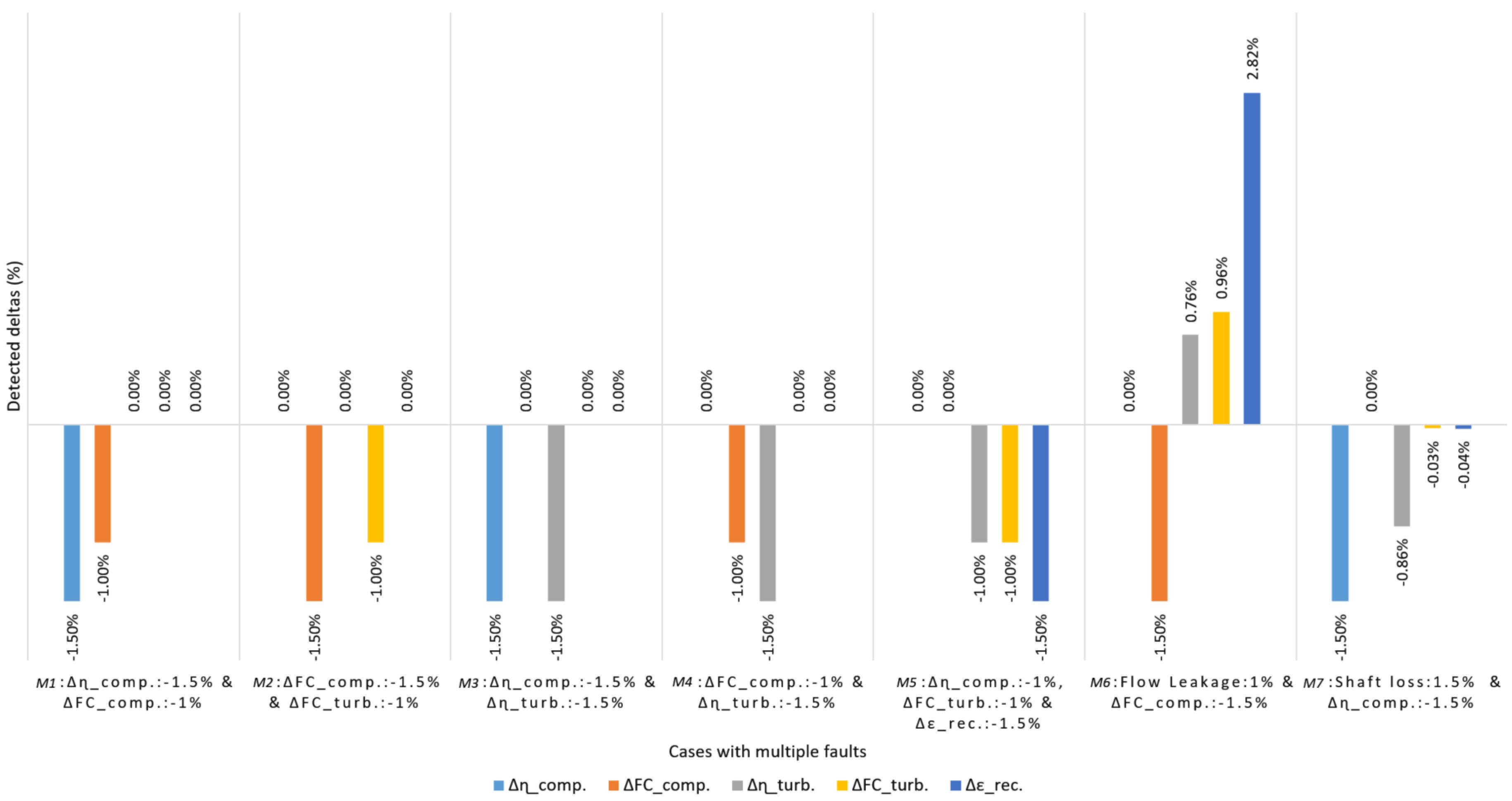
Results from the AnSyn for simultaneously occurring multiple faults are displayed in
Figure 6. As expected, AnSyn can identify correct fault locations and magnitudes for all cases except those including flow leakage and shaft loss. However, when these faults are combined with compressor’s faults, corresponding compressors deltas can be correctly identified by the AnSyn.
The correlation coefficients between exchange rates and signatures for the above cases are reported in
Table 8. For each case, this step gives maximum correlation for corresponding signatures from the database that reveals the location of the faults correctly.
Table 9 summarizes the estimated magnitudes of faults for different cases with multiple faults by regression analysis and the comparison with AnSyn. As can be seen, the regression can give good indication of faults magnitude with some level of error, but the AnSyn performs better. The accuracy can be further improved by including more measurements in the multiple linear regression. However, a limited number of measurements are available in reality for such analysis. Additionally, if a sensor fault occurs and one or more measurements need to be removed from the scheme, the accuracy of the regression can even deteriorate. Sensor faults will also reduce the fault detectability by the AnSyn, since corresponding performance delta for the removed measurement also need to be removed from the matching scheme, as presented in
Table 2.
Overall, the results presented until now show that the proposed diagnostics scheme can be used to detect the location and magnitude of different component faults with acceptable accuracy. Combining results from AnSyn with the signature-based algorithm increases the confidence on the final outcome of the proposed scheme. However, the above analysis thus far does not include any measurement uncertainty (i.e., sensor noise and bias), which can be quite common in reality. Hence, the influence of measurement uncertainty on the proposed fault diagnostics scheme is assessed in the following section.
First, the influence of measurement uncertainty on the AnSyn is examined by performing a sensitivity analysis. Here, the measurements corresponding to each of the performance deltas, as listed in
Table 2, are varied within measurement uncertainty range. The measurement uncertainties used in this paper are obtained from the literature [
42,
43]. It is considered here that
measurement is available through a differential pressure sensor across recuperator.
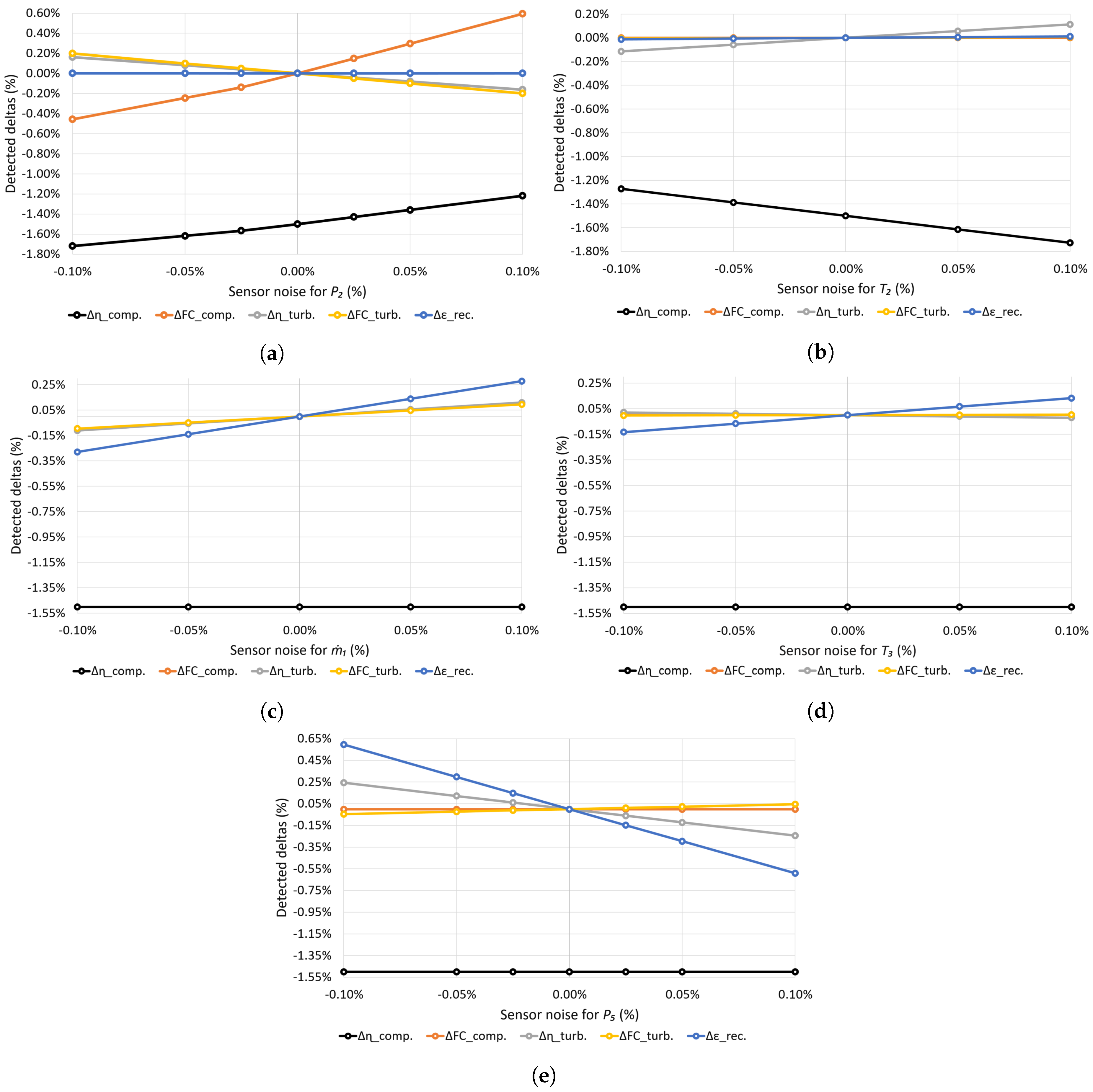
Figure 7 shows sensitivity analysis of measurement uncertainties on all five performance deltas. Here, case study
i.e., 1.5% drop in compressor isentropic efficiency is considered for this analysis. As can be seen in
Figure 7, the compressor isentropic efficiency is only affected by
and
measurements. However, there is very strong linkage between
and compressor flow capacity, and
and recuperator effectiveness. Hence, measurement uncertainties in
and
can give misleading indication of faults related to compressor flow capacity and recuperator effectiveness, respectively; although their magnitudes are not as prominent as the fault. Other measurement uncertainties have negligible influence on different performance deltas. Therefore, it can be summarized from the sensitivity analysis that the influence of measurement uncertainties is limited and will have the effect of a reduced accuracy in fault magnitude estimation. Moreover, the sensor data can be filtered before using it for diagnostics purpose to decrease false alarm due to sensor noise related uncertainties.
Thereafter, the effect of measurement uncertainties on the correlation step is assessed. As in the previous section, the case study
, i.e., 1.5% drop in compressor isentropic efficiency is considered. For each of the sensors, maximum deviation in the measurement is assumed. As can be seen in
Table 10, the measurement uncertainties has influence on the correlation coefficient. However, the influence is negligible and still faults are identified correctly by giving maximum correlation coefficient for corresponding fault location.
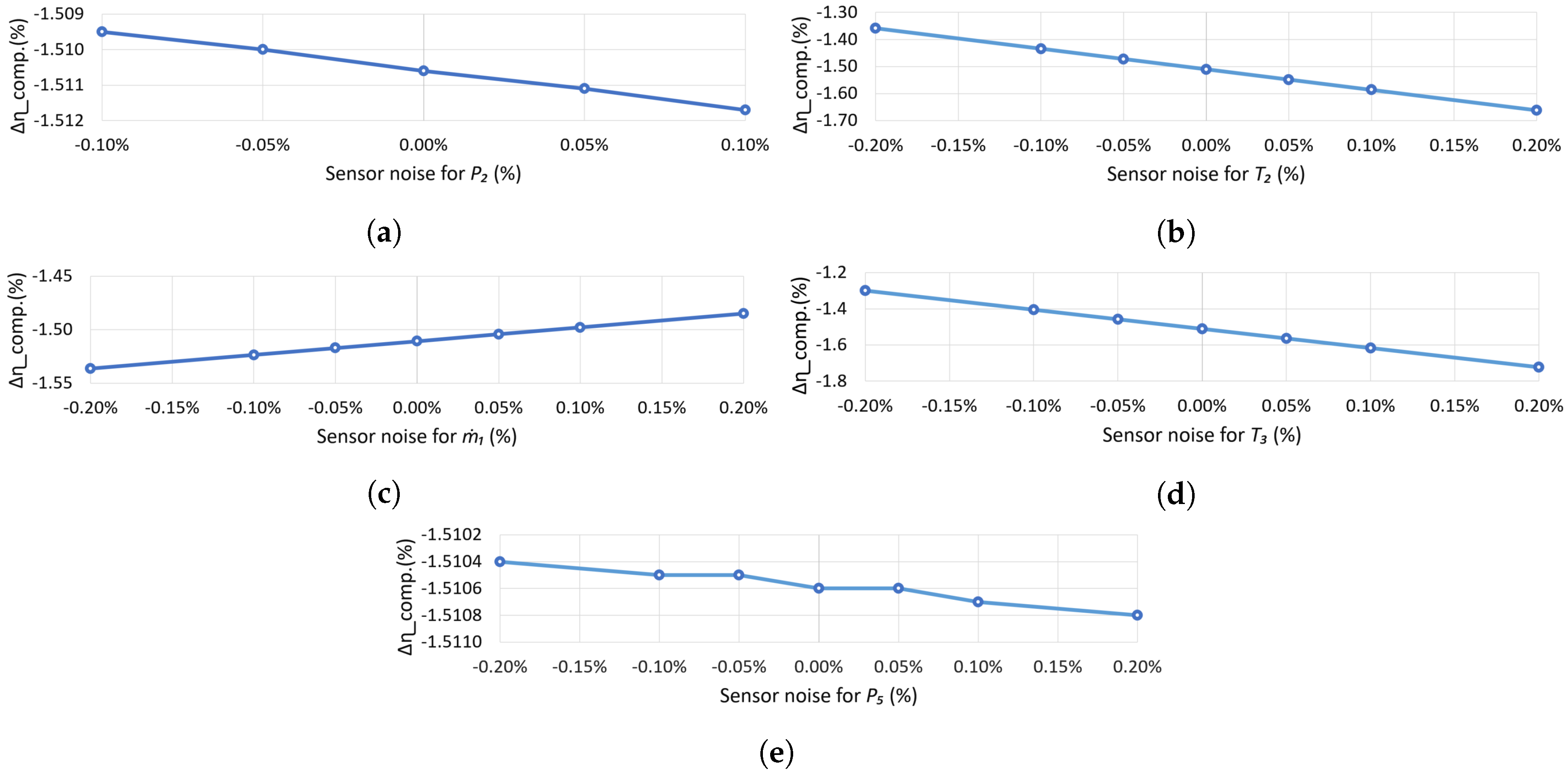
Eventually, the influence of measurement uncertainties on the fault magnitude detection by using linear regression is examined with the help of sensitivity analysis. The sensor measurements are varied by introducing different level of uncertainties and the corresponding fault magnitudes are calculated for case study
. The result of the analysis is summarized in
Figure 8. The most influencing measurement uncertainty in this case corresponds to
and
. Despite the high sensitivity for some measurements, the regression can still provide fault magnitude with acceptable accuracy.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}