

Scheduling Control Considering Model Inconsistency of Membrane-Wing Aircraft


Abstract
1. Introduction
2. Materials and Methods
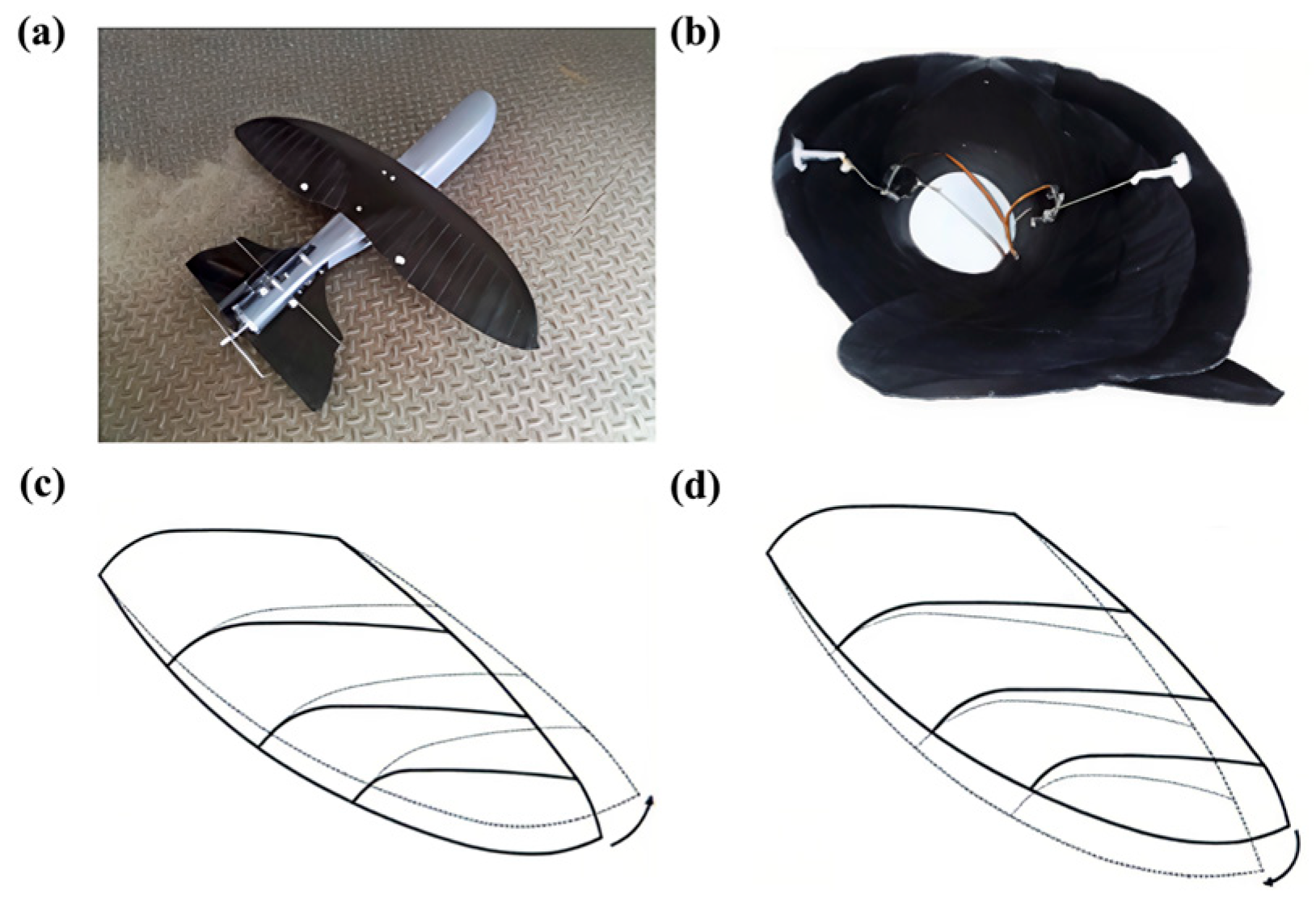
- A couple of simple integrated control models need to be derived from a flight dynamics model and structural dynamics model under different aerodynamic loads. Due to the different structural strength characteristics of membrane wings under positive and negative loads, two sets of control models are designed.
- The controller needs to be able to compensate for the aeroelastic effects of membrane wings, and the mechanics should be designed to keep the autopilot in the correct operating region based on the current flight conditions.
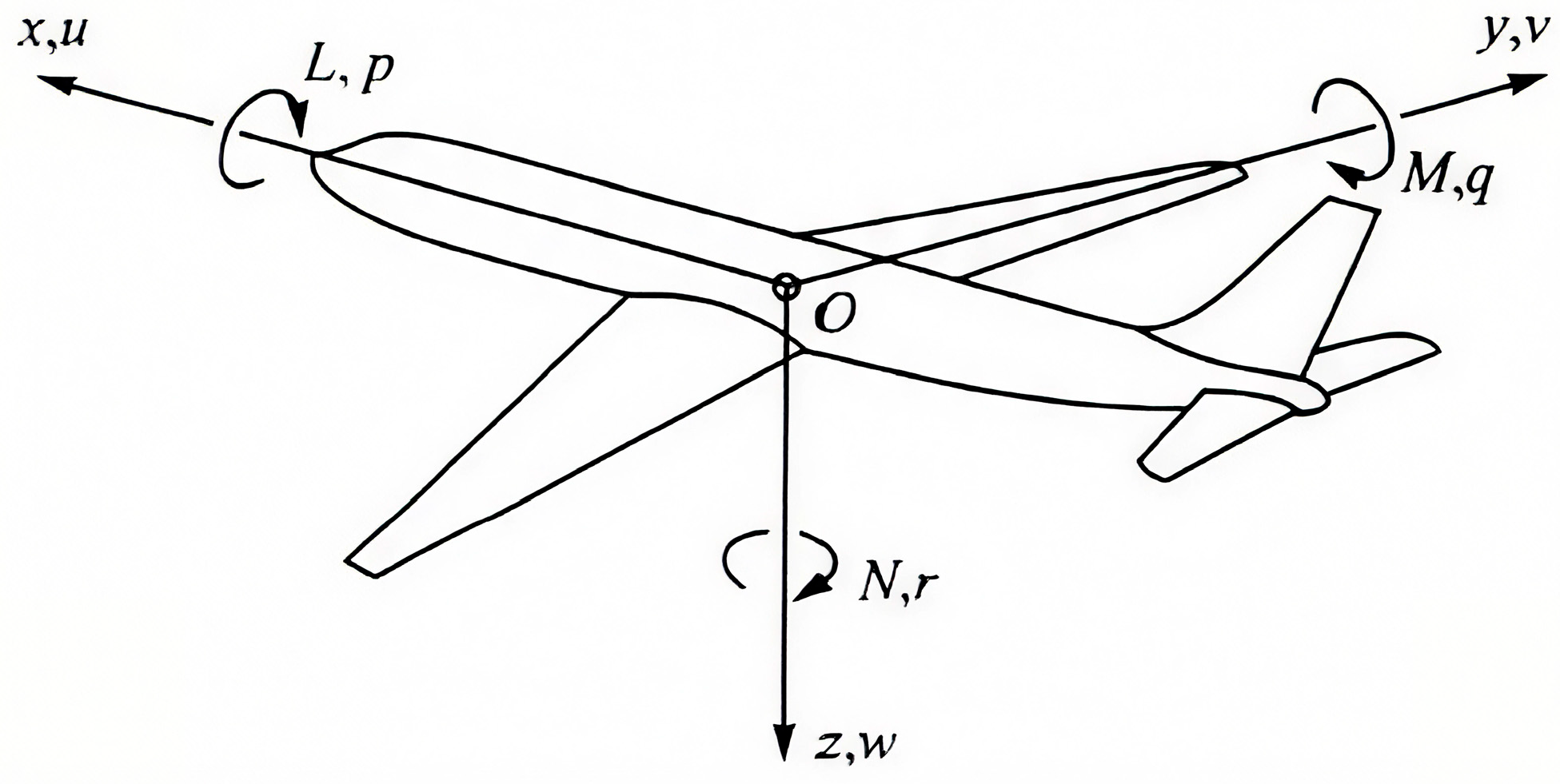
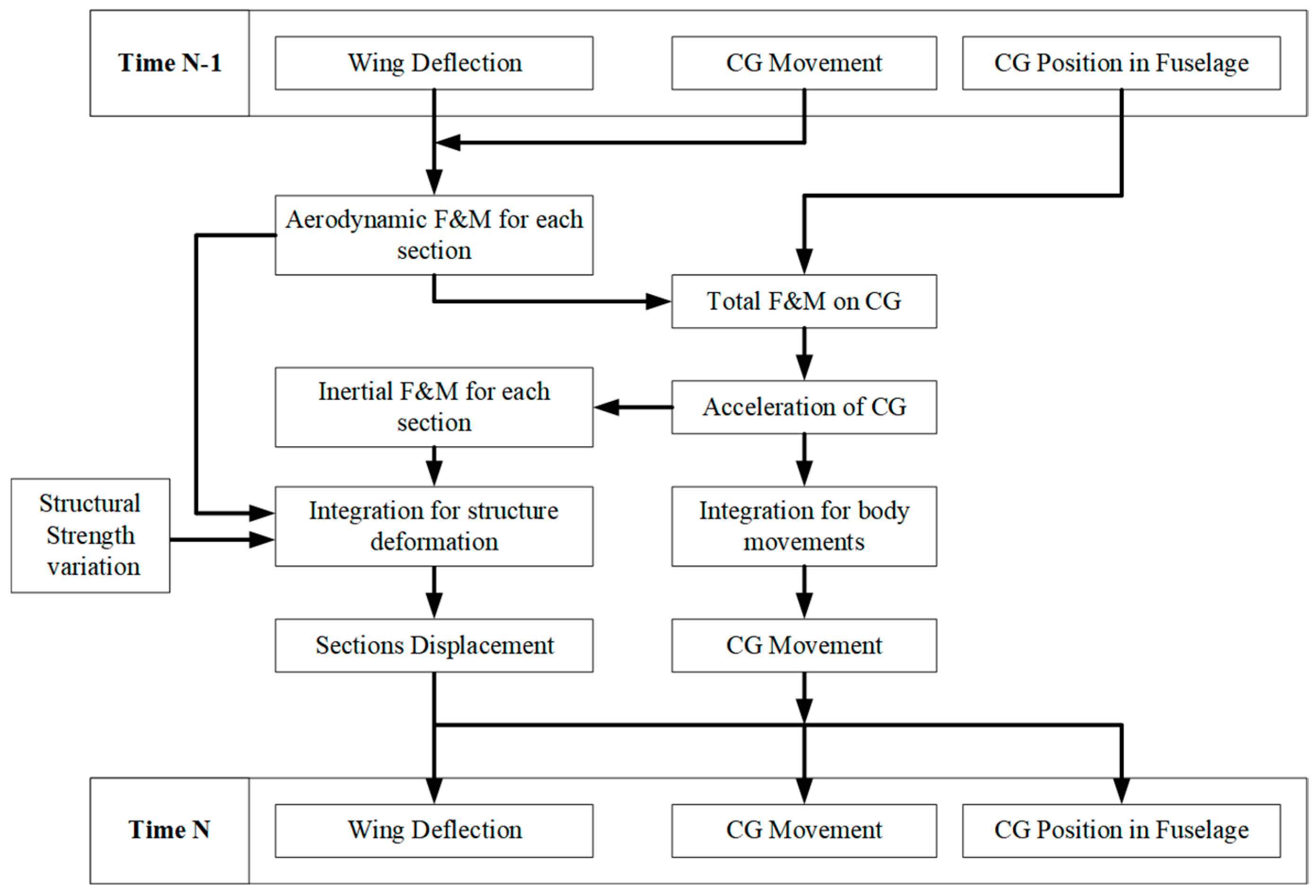
2.1. Integrated Dynamic Model
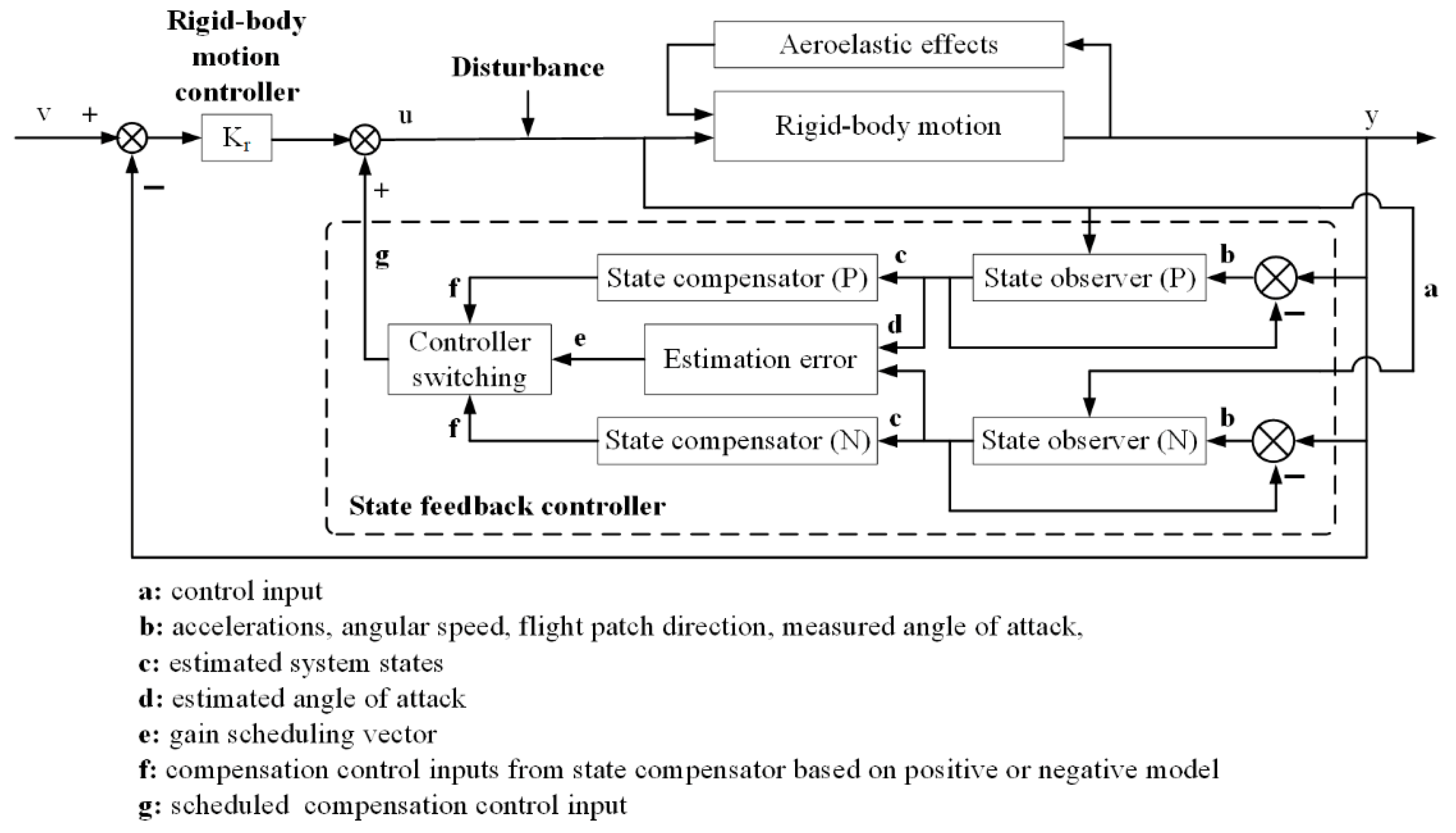
2.2. State Feedback Controller
2.3. Controller Scheduling
- Measure the effects of disturbances, such as attack angles in this article.
- Estimate the response of the system based on the state observer given in Equation (34).
- Compare the estimated and measured system states; as each model represents a specific operating region, the model with the smallest estimation error will be chosen as the recognized system operating region.
3. Results
3.1. Simulation Methods
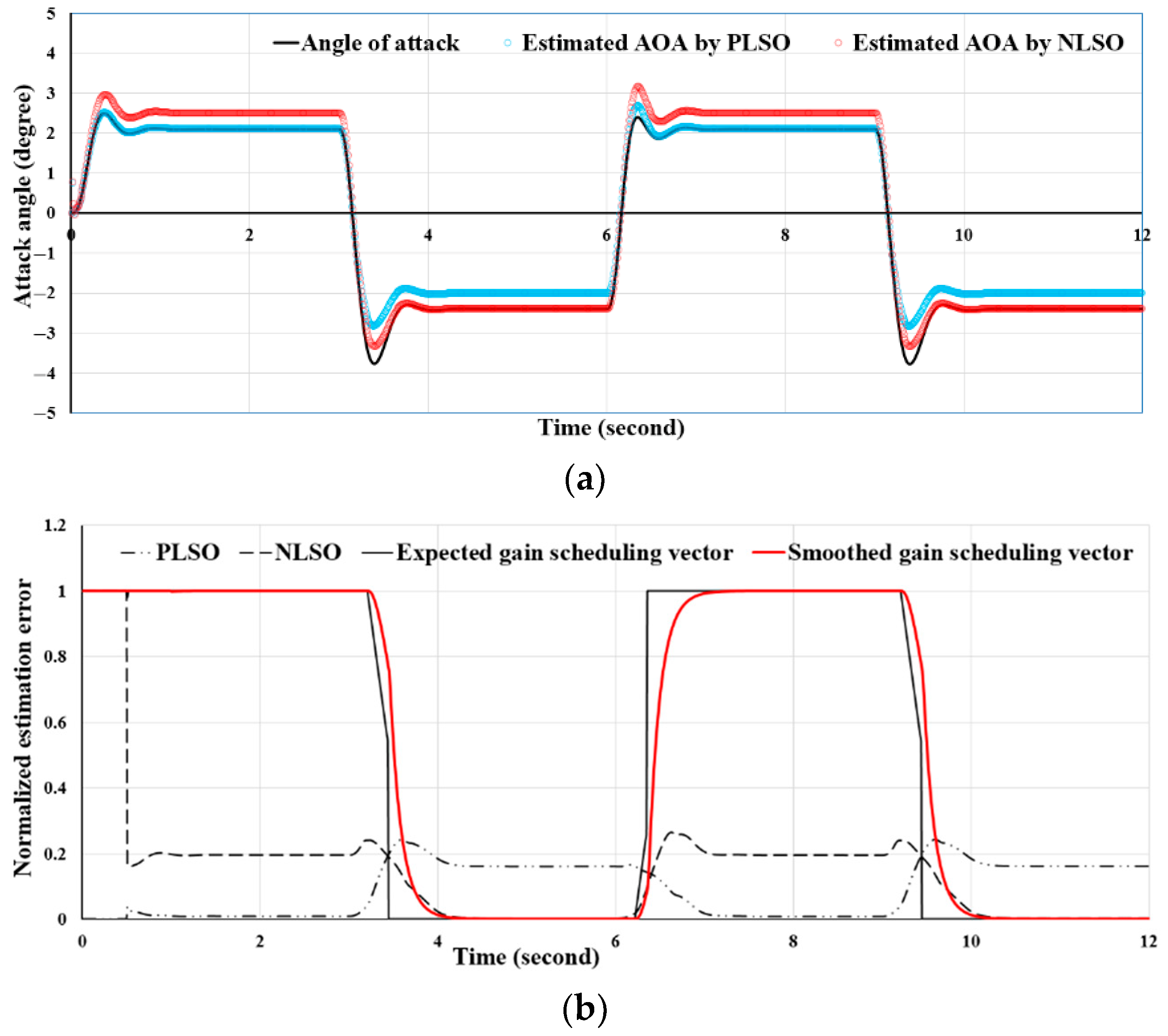
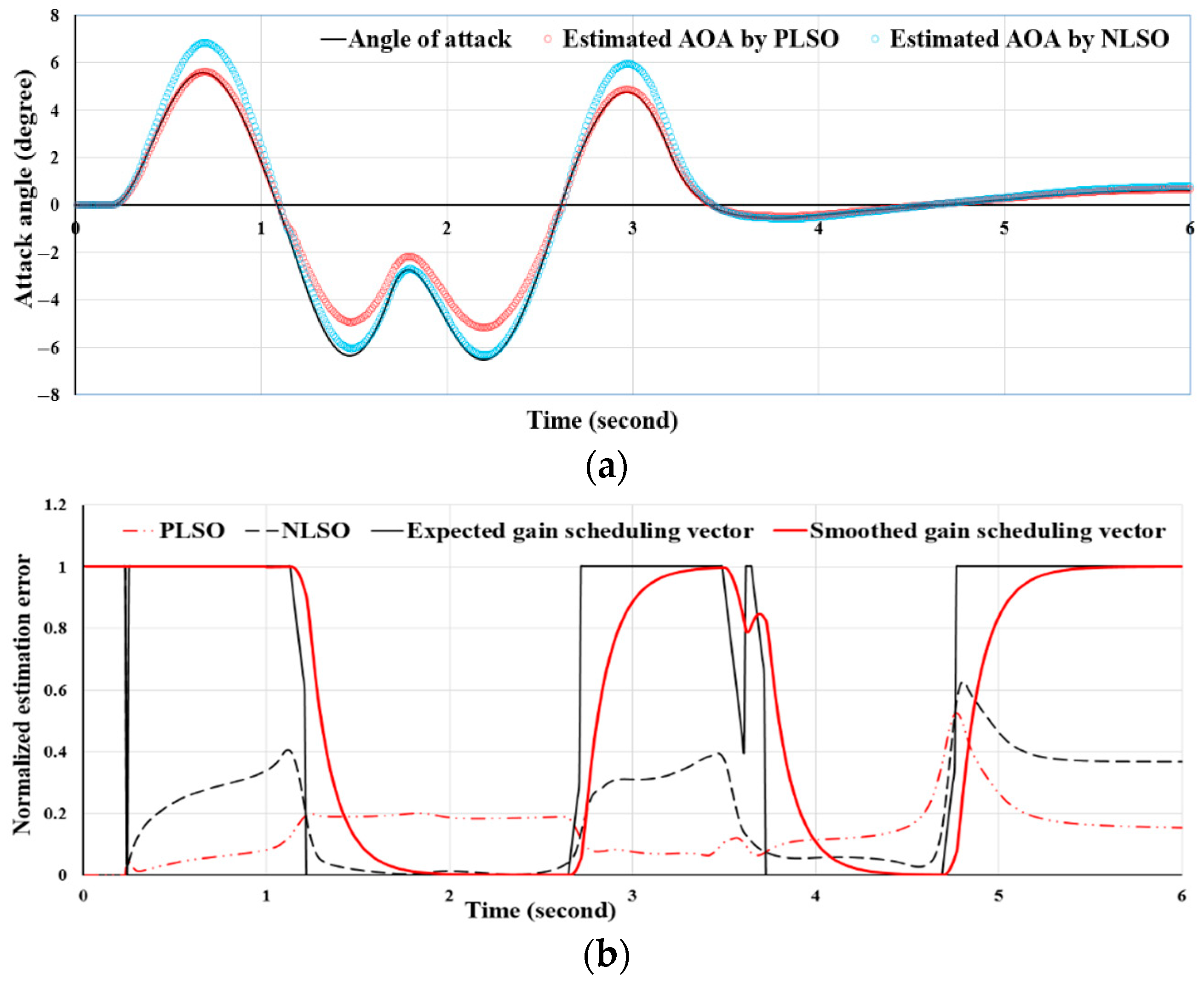
3.2. Estimation Results of State Observer
3.3. Controller Scheduling Mechanism
- Scenario 1: The current NLSO has a smaller estimation error, and the future NLSO will still maintain a smaller estimation error. In this circumstance, NLSO is an advantageous observer for a short period of time, so we set ρ to stay at 0 to make NLSO work.
- Scenario 2: The current PLSO has a smaller estimation error, and the future PLSO will still maintain a smaller estimation error. In this circumstance, PLSO is an advantageous observer for a short period of time, so we set ρ to stay at 1 to make PLSO work.
- Scenario 3: The current PLSO has a smaller estimation error, but the future NLSO will have a smaller estimation error. In this circumstance, although PLSO currently holds an advantage, NLSO will soon become the advantageous observer. Therefore, we use –Δt−1 to make ρ approach 0.
- Scenario 4: The current NLSO has a smaller estimation error, but the future PLSO will have a smaller estimation error. In this circumstance, although NLSO currently holds an advantage, PLSO will soon become the advantageous observer. Therefore, we use +Δt−1 to make ρ approach 1.
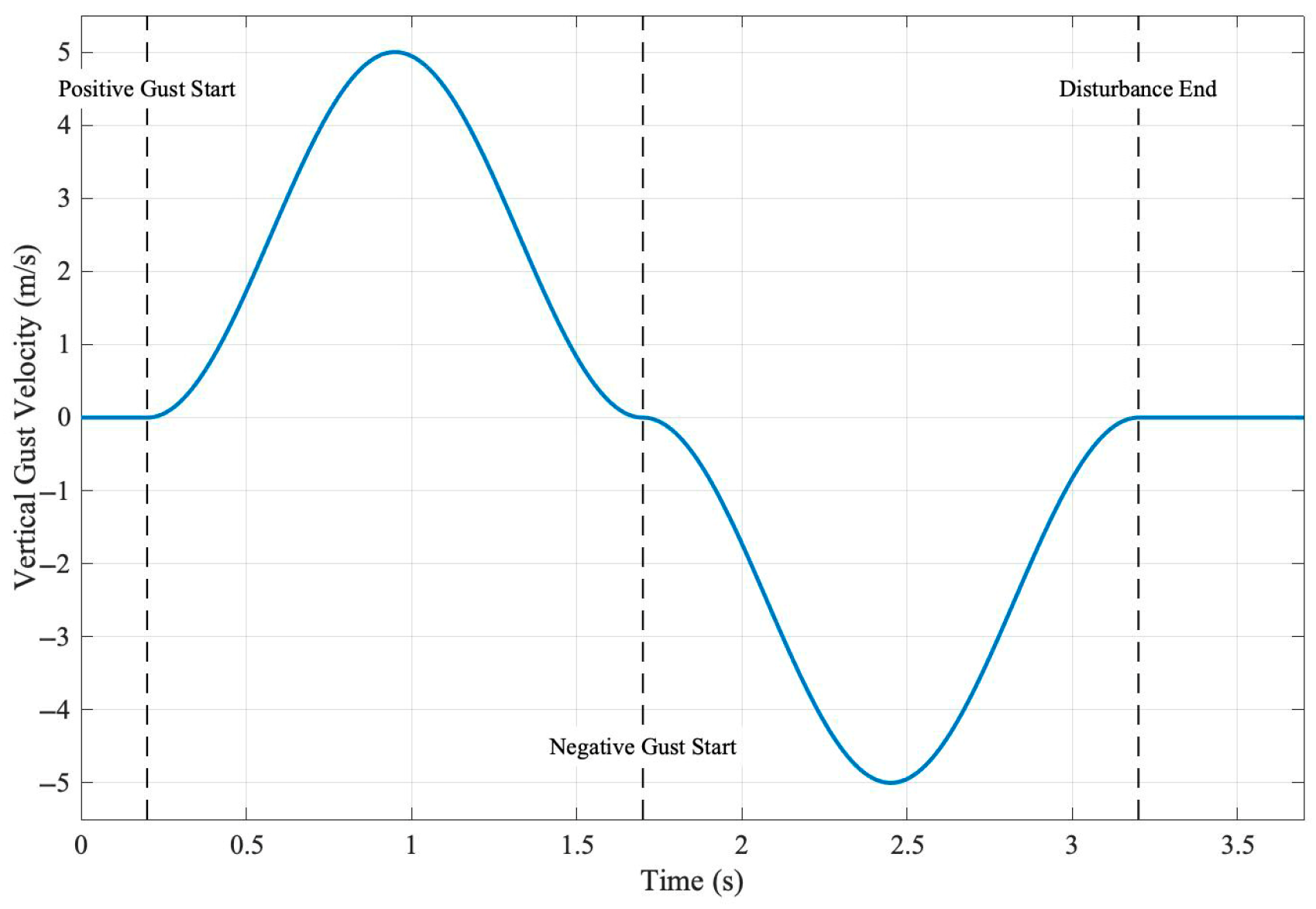
3.4. Active Gust Response Suppression
4. Discussion
- Sensor noise and estimation fidelity: The core scheduling mechanism relies on accurate real-time estimation of the attack angles. Practical attack angle sensors are subject to significant noise, bias, and dynamic errors, especially in the turbulent low-Reynolds regimes in which MWAVs operate. Noise can corrupt the error signal used for observer switching, potentially leading to inappropriate or chattering switching decisions. Quantifying the impact of specific sensor noise levels on switching logic stability and overall control performance is crucial. Mitigation strategies could involve robust filtering of the error signals to increase noise immunity.
- Computational demands and real-time execution: The proposed architecture involves running two observers (PLSO and NLSO) in parallel alongside the main flight controller and the switching logic. This imposes a substantial computational burden. Real-time execution on typical MAV-grade embedded processors could be challenging, particularly at the high update rates required for dynamic flight control. The computational cost of the observers themselves and the switching logic need to be evaluated. Strategies to address this include optimizing the observer algorithms, exploring simplified but robust observer models for real-time use, investigating hardware acceleration, or rigorously testing the system’s performance under reduced update rates.
- Model uncertainty and environmental robustness: The simplified dynamic model, while capturing key coupling effects, inherently possesses uncertainties. Real flight involves unmodeled dynamics, parameter variations, and complex, unsteady aerodynamic effects beyond simulated gusts. The performance of both the observers and the switched controller under significant model mismatch requires further investigation. Robust control design techniques or adaptive elements might be necessary to ensure reliable operation across the operational envelope.
- Validate the proposed scheduling strategy in a realistic environment. This should involve wind tunnel testing or flight testing of a membrane-wing aircraft prototype instrumented with the necessary sensors. Key metrics to assess include robustness to unmodeled aerodynamics, structural vibrations, and real-world disturbances, directly comparing experimental results against the simulation results presented.
- Optimize the algorithms for efficiency and rigorously evaluate the real-time performance on representative embedded platforms. Investigating simplified observer models or event-triggered updates could be valuable strategies to reduce the computational load without significant performance degradation.
- Adopt advanced robust control methods such as H ∞ control to improve adaptability to model uncertainty and actual flight disturbances, ensuring stable flight.
- Study strategies for active membrane-wing aircraft control, such as integrating auxiliary control surfaces or smart material actuators. This would present promising avenues for future exploration and could synergize with the developed control approach.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tiomkin, S.; Raveh, D.E. A review of membrane-wing aeroelasticity. Prog. Aerosp. Sci. 2021, 126, 100738. [Google Scholar] [CrossRef]
- Deng, S.; Wang, J.; Liu, H. Experimental study of a bio-inspired flapping wing MAV by means of force and PIV measurements. Aerosp. Sci. Technol. 2019, 94, 105382. [Google Scholar] [CrossRef]
- Bie, D.; Li, D.; Xiang, J.; Li, H.; Kan, Z.; Sun, Y. Design, aerodynamic analysis and test flight of a bat-inspired tailless flapping wing unmanned aerial vehicle. Aerosp. Sci. Technol. 2021, 112, 106557. [Google Scholar] [CrossRef]
- Li, F.; Bai, P.; Liu, Q. Discussion about the laminar separation theory at low Reynolds numbers. Phys. Gases 2017, 2, 1–10. [Google Scholar]
- Kay, N.J.; Richards, P.J.; Sharma, R.N. Low-Reynolds number behavior of the leading-edge suction parameter at low pitch rates. AIAA J. 2022, 60, 1721–1729. [Google Scholar] [CrossRef]
- Guo, S.; Li, H.; Zhou, C.; Zhang, Y.; He, Y.; Wu, J. Analysis and experiment of a bio-inspired flyable micro flapping wing rotor. Aerosp. Sci. Technol. 2018, 79, 506–517. [Google Scholar] [CrossRef]
- Chu, L.; Li, Q.; Gu, F.; Du, X.; He, Y.; Deng, Y. Design, modeling, and control of morphing aircraft: A review. Chin. J. Aeronaut. 2022, 35, 220–246. [Google Scholar] [CrossRef]
- Wang, Z.; Sun, X.; Yang, Y.; Ge, W.; Li, D.; Bao, P.; Wu, Q.; Da, A. Design optimization and testing of a morphing leading-edge with a variable-thickness compliant skin and a closed-chain mechanism. Chin. J. Aeronaut. 2024, 37, 285–300. [Google Scholar] [CrossRef]
- Yang, H.; Dudley, J.; Davis, J. Aeroelasticity Investigation of Generic SUAS-Membrane Wing Validation Study. In Proceedings of the 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013. [Google Scholar]
- Gehrke, A.; Richeux, J.; Uksul, E.; Mulleners, K. Aeroelastic characterisation of a bio-inspired flapping membrane wing. Bioinspiration Biomim. 2022, 17, 065004. [Google Scholar] [CrossRef]
- Béguin, B.; Breitsamter, C. Effects of membrane pre-stress on the aerodynamic characteristics of an elasto-flexible morphing wing. Aerosp. Sci. Technol. 2014, 37, 138–150. [Google Scholar] [CrossRef]
- Waszak, M.; Davidson, J.; Ifju, P. Simulation and flight control of an aeroelastic fixed wing micro aerial vehicle. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Monterey, CA, USA, 5–8 August 2002. [Google Scholar]
- Shyy, W.; Ifju, P.G.; Viieru, D. Membrane Wing-Based Micro Air Vehicles. Appl. Mech. Rev. 2005, 58, 283. [Google Scholar] [CrossRef]
- Stanford, B.; Sytsma, M.; Albertani, R.; Viieru, D.; Shyy, W.; Ifju, P. Static aeroelastic model validation of membrane micro air vehicle wings. AIAA J. 2007, 45, 2828–2837. [Google Scholar] [CrossRef]
- Xi, H.E.; Qinfeng, G.U.O.; Jinjun, W. Regularities between kinematic and aerodynamic characteristics of flexible membrane wing. Chin. J. Aeronaut. 2022, 35, 209–218. [Google Scholar] [CrossRef]
- Li, Y.; Ge, W.; Zhou, J.; Zhang, Y.; Zhao, D.; Wang, Z.; Dong, D. Design and experiment of concentrated flexibility-based variable camber morphing wing. Chin. J. Aeronaut. 2022, 35, 455–469. [Google Scholar] [CrossRef]
- Wang, H.; He, X.; Wang, J. Experimental study on aerodynamic and deformation characteristics of flexible membrane wing. J. Beijing Univ. Aeronaut. Astronaut. 2022, 48, 665–673. [Google Scholar]
- Feng, S.Y.; Guo, Q.F.; Wang, J.J.; Yang, X.U. Influence of membrane wing active deformation on the aerodynamic performance of an aircraft model. Sci. China Technol. Sci. 2022, 65, 2474–2484. [Google Scholar] [CrossRef]
- Barroso-Barderas, E.; Rodríguez-Sevillano, Á.A.; Bardera-Mora, R.; Crespo-Moreno, J.; Matías-García, J.C. Design of Non-Conventional Flight Control Systems for Bioinspired Micro Air Vehicles. Drones 2022, 6, 248. [Google Scholar] [CrossRef]
- Negahban, M.H.; Bashir, M.; Priolet, C.; Botez, R.M. Novel Twist Morphing Aileron and Winglet Design for UAS Control and Performance. Drones 2024, 8, 392. [Google Scholar] [CrossRef]
- Abdulrahim, M.; Garcia, H.; Lind, R. Flight characteristics of shaping the membrane wing of a micro air vehicle. J. Aircr. 2005, 42, 131–137. [Google Scholar] [CrossRef]
- Lee, S.; Tjahjowidodo, T.; Moon, S.K. Flexible membrane wing warping using tendon-sheath mechanism. In Proceedings of the 23rd Mediterranean Conference on Control and Automation, Torremolinos, Spain, 16–19 June 2015. [Google Scholar]
- Parancheerivilakkathil, M.S.; Pilakkadan, J.S.; Ajaj, R.M.; Amoozgar, M.; Asadi, D.; Zweiri, Y.; Friswell, M.I. A review of control strategies used for morphing aircraft applications. Chin. J. Aeronaut. 2024, 37, 436–463. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Guo, B.; Zhao, Z. On convergence of tracking differentiator. Int. J. Control 2011, 84, 693–701. [Google Scholar] [CrossRef]
- Wang, Q.; Chen, Y. Optimal Control: Theory, Method and Applications, 1st ed.; Higher Education Press: Beijing, China, 2011; pp. 15–150. [Google Scholar]
- Erfan, R.; Bolandi, H.; Fathi, M. Designing a fixed-time observer-based adaptive non-singular sliding mode controller for flexible spacecraft. ISA Trans. 2024, 148, 32–44. [Google Scholar]
- Suh, P.M.; Chin, A.; Mavris, D.N. Virtual Deformation Control of the X 56A Model with Simulated Fiber Optic Sensors. In Proceedings of the AIAA Atmospheric Flight Mechanics (AFM) Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar]
- Ryan, J.J.; Bosworth, J.T. Current and future research in active control of lightweight, flexible structures using the X-56 aircraft. In Proceedings of the 52nd Aerospace Sciences Meeting, National Harbor, MD, USA, 13–17 January 2014. [Google Scholar]
- Hashemi, K.E.; Pak, C.; Akella, M.R. Delta adaptive flexible motion control for the X-56A aircraft. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Kissimmee, FL, USA, 5 January 2015. [Google Scholar]
- Buttini, T.; Moreira, F.; Silvestre, F.J.; Silva, R.G.A.d. Aeroelastic State-space Model Development Based on Frequency Response Identification and Integration with Flight Dynamics. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Kissimmee, FL, USA, 5 January 2015. [Google Scholar]
- Lai, K.L. Reduced-order aeroelastic modeling using coupled CFD-CSD simulations and system identification technique. In Proceedings of the AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Boston, MA, USA, 8–11 April 2013. [Google Scholar]
- Silvestre, F.J.; Luckner, R. Experimental validation of a flight simulation model for slightly flexible aircraft. AIAA J. 2015, 53, 3620–3636. [Google Scholar] [CrossRef]
- Zhang, L.; Ma, D.; Yang, M.; Yao, Y.; Yu, Y.; Yang, X. Experimental and numerical study on the performance of double membrane wing for long-endurance low-speed aircraft. Appl. Sci. 2022, 12, 6765. [Google Scholar] [CrossRef]
- Yang, Y.U. Modelling and Gust Alleviation Method for Flexible Wing Biomimetic Aircraft. Ph.D. Thesis, Beijing Institute of Technology, Beijing, China, 2017. [Google Scholar]
- Nelson Robert, C. Flight Stability and Automatic Control, 2nd ed.; WCB/McGraw Hill: New York, NY, USA, 1998; pp. 110–120. [Google Scholar]
- Guo, D.; Xu, M.; Chen, S.-L.; Yao, W.-G. CFD Based Simulation of Elastic Aircraft in Maneuvering Flight. In Proceedings of the 51st AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013. [Google Scholar]
- Wright, J.R.; Cooper, J.E. Introduction to Aircraft Aeroelasticity and Loads; Shanghai Jiao Tong University Press: Shanghai, China, 2010; pp. 281–300. [Google Scholar]
- Waszak, M.R.; Schmidt, D.K. Flight dynamics of aeroelastic vehicles. J. Aircr. 1988, 25, 563–571. [Google Scholar] [CrossRef]
- Majeed, M.; Singh, J. Frequency and time domain recursive parameter estimation for a flexible aircraft. IFAC Proc. Vol. 2013, 46, 453–458. [Google Scholar] [CrossRef]
- Mohamed, M.; Swaroop, S. Model simplification methods for a reduced order system of flexible aircraft. In Proceedings of the 2015 International Conference on Control, Instrumentation, Communication and Computational Technologies, Kumaracoil, India, 18–19 December 2015. [Google Scholar]
- Looye, G. An Integrated Approach to Aircraft Modelling and Flight Control Law Design. Ph.D. Thesis, Universität Delft, Delft, The Netherlands, 2008. [Google Scholar]
- Tregidgo, L.; Wang, Z.; Gursul, I. Unsteady fluid–structure interactions of a pitching membrane wing. Aerosp. Sci. Technol. 2013, 28, 79–90. [Google Scholar] [CrossRef]
- Colgren, R.D. Method and System for Estimation and Correction of Angle-of-Attack and Sideslip Angle from Acceleration Measurements. U.S. Patent 6273370, 14 August 2001. [Google Scholar]
- Astrom, K. Introduction to Stochastic Control Theory; Dover Publications: New York, NY, USA, 2006; p. 6. [Google Scholar]
- Kotikalpudi, A.; Moreno, C.; Taylor, B.; Pfifer, H.; Balas, G. Low cost development of a nonlinear simulation for a flexible uninhabited air vehicle. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014. [Google Scholar]
- Theodore, T. General Theory of Aerodynamic Instability and the Mechanism of Flutter. No. NACA-TR-496, 1 December 1979. [Google Scholar]
- Perry, B., III. Theodorsen’s and Garrick’s Flutter Calculations: Revisited. J. Aircr. 2025, 62, 224–228. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section 1 | Section 2 | Section 3 | Section 4 | Section 5 | |
|---|---|---|---|---|---|
| Positive loads | Concentrated force on wingtip, lower than 20.6 N | ||||
| E 1 (Pa) | 9.853 × 108 | 3.273 × 108 | 1.523 × 108 | 7.603 × 107 | 5.053 × 107 |
| G 2 (Pa) | 3.883 × 106 | 2.653 × 106 | 1.473 × 106 | 1.503 × 106 | 2.663 × 106 |
| Negative loads | Concentrated force on wingtip, lower than 6.2 N | ||||
| E (Pa) | 6.073 × 108 | 1.713 × 108 | 7.913 × 107 | 6.283 × 107 | 4.443 × 107 |
| G (Pa) | 2.513 × 106 | 1.223 × 106 | 8.613 × 105 | 1.163 × 106 | 1.863 × 106 |
| Dynamic Properties | Positive Load Conditions | Negative Load Conditions |
|---|---|---|
| Short-period motion | f = 2.77 | f = 2.66 |
| Model frequencies of membrane wing structure | f1 = 22.40 | f1 = 14.38 |
| f2 = 59.54 | f2 = 35.49 | |
| f3 = 94.15 | f3 = 55.59 | |
| f4 = 118.68 | f4 = 67.94 |
| Property | Value |
|---|---|
| Wingspan (m) | 1.0 |
| Length (m) | 0.9 |
| Mean aerodynamic chord (m) | 0.17 |
| Total mass (kg) | 2.0 |
| Speed (m/s) | 16 |
| Overload limit (m/s2) | −15~20 |
| Load Conditions | Type of State Observer | MAE | RMSE |
|---|---|---|---|
| Positive loads | PLSO | 0.05 | 0.06 |
| NLSO | 0.33 | 0.36 | |
| Negative loads | PLSO | 0.31 | 0.34 |
| NLSO | 0.02 | 0.04 |
| Gust Suppression Control Methods | Decrease in Maximum Attack Angles (Compared with Rigid Control Model) | Decrease in Maximum Wingtip Twist Angles (Compared with Rigid Control Model) |
|---|---|---|
| Single Control Model (Without scheduling process) | 13% | 12% |
| Double Control Model (With scheduling process) | 27% | 25% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Fu, Y.; Wang, Z.; Yu, Y.; Li, H. Scheduling Control Considering Model Inconsistency of Membrane-Wing Aircraft. Processes 2025, 13, 2367. https://doi.org/10.3390/pr13082367
Wu Y, Fu Y, Wang Z, Yu Y, Li H. Scheduling Control Considering Model Inconsistency of Membrane-Wing Aircraft. Processes. 2025; 13(8):2367. https://doi.org/10.3390/pr13082367
Chicago/Turabian StyleWu, Yanxuan, Yifan Fu, Zhengjie Wang, Yang Yu, and Hao Li. 2025. "Scheduling Control Considering Model Inconsistency of Membrane-Wing Aircraft" Processes 13, no. 8: 2367. https://doi.org/10.3390/pr13082367
APA StyleWu, Y., Fu, Y., Wang, Z., Yu, Y., & Li, H. (2025). Scheduling Control Considering Model Inconsistency of Membrane-Wing Aircraft. Processes, 13(8), 2367. https://doi.org/10.3390/pr13082367