
Physics-Constrained Diffusion-Based Scenario Expansion Method for Power System Transient Stability Assessment

 ,
,
Abstract
1. Introduction
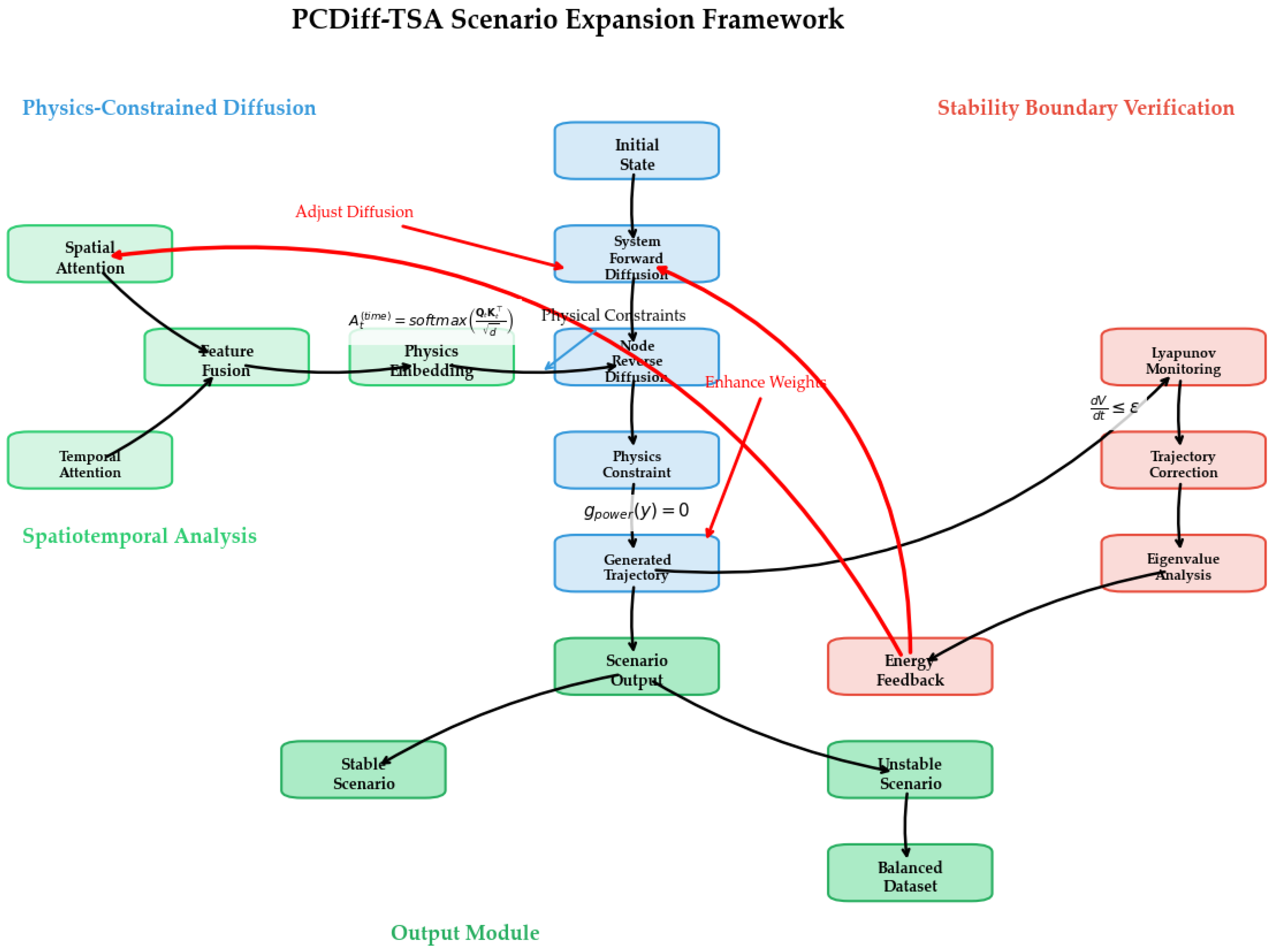
- A Physics-Constrained Hierarchical Conditional Diffusion Framework: This framework embeds transient differential equation constraints into the reverse sampling process. By leveraging non-equilibrium thermodynamic sampling strategies, it achieves precise control over the physical rationality of dynamic trajectories, ensuring that the generated transient scenario trajectories strictly adhere to rotor angle motion equations and power flow balance laws, thus resolving the “data hallucination” issue caused by the lack of physical constraints in methods like GANs.
- A Spatiotemporal Decoupling Analysis Mechanism: This mechanism integrates impedance matrix regularization and power-angle swing feature decoupling modules. It separately captures grid topological correlation characteristics (via spatial analysis) and time-series oscillation patterns (via temporal analysis), addressing the inability of linear methods like SMOTE to model complex nonlinear spatiotemporal dynamics in power systems.
- A Stability Boundary-Aware Verification Mechanism: By introducing a transient energy function as stability boundary-aware loss and combining it with the Lyapunov direct method, this mechanism constructs a dynamic verification loop. It ensures that the generated scenarios comply with actual system safety thresholds, enhancing the reliability of scenario expansion for TSA.
2. Materials and Methods
2.1. PCDiff Model Basics
2.2. Embedding Mechanism of Power System Transient Differential Equations
2.2.1. Core Dynamic Constraints: Second-Order Rotor Motion Equation
2.2.2. Residual-Driven Loss Function
2.2.3. Regularization of Transient Energy Function
- Force scenarios to satisfy the dynamic laws of the power system and avoid physical irrationality problems;
- Rely on the dissipativity of the transient energy function to ensure that the trajectory is in the stable region, adapting to TSA;
- Explicitly embed physical equations, endow the generation process with mechanism support, and make up for the black-box defect of pure data-driven models.
2.3. Spatiotemporal Decoupling and Self-Attention Coupling
2.3.1. Spatiotemporal Decoupling Attention Decomposition
- (1)
- Temporal Self-Attention
- (2)
- Spatial Self-Attention
2.3.2. Physical Constraint Coupling Interaction
2.4. Construction of Physics-Constrained Generative Model
2.4.1. Hybrid Conditional Encoding Strategy
- (1)
- Operation State Encoding
- (2)
- Topology Structure Encoding
- (3)
- Dynamic Gating Mechanism
- (4)
- Injection of Physical Constraints
2.4.2. Hierarchical Diffusion Generation Process
- (1)
- System-Level Diffusion
- (2)
- Node-Level Reverse Diffusion
- (3)
- Dynamic Projection Layer
2.4.3. Stability Verification Mechanism
- (1)
- Lyapunov Real-Time Monitoring
- (2)
- Eigenvalue Online Correction Strategy
- (3)
- Energy Margin Adaptive Adjustment Strategy
- Topology Encoding: Extract power network topology features, construct a topology adjacency matrix, and embed it into the state space.
- Attention Mechanism Optimization: In the deep learning or model prediction framework, dynamically enhance the attention weights of key nodes, and prioritize regulation of components with significant impacts on the stability margin.
- Fault Ride-Through Capability Improvement: Through the above adjustments, guide control strategies or system models to focus on high-risk areas, optimize control variable allocation, enhance the system’s fault ride-through capability under low-stability-margin conditions, and avoid cascading losses caused by minor disturbances.
2.5. Data Preprocessing and Model Evaluation Metrics
2.5.1. Spatiotemporal Alignment and Normalization
- (1)
- Time Synchronization
- (2)
- Normalization
2.5.2. Physical Constraint Correction
2.5.3. Dynamic Trajectory Decomposition
2.5.4. Physical Rationality Index System
- (1)
- Static Rationality
- (2)
- Dynamic Rationality
- (3)
- Structural Rationality
2.5.5. Evaluation Metrics
2.6. TSA Process Based on Scenario Expansion
- Data Preprocessing: Perform spatiotemporal alignment and range normalization on PMU and SCADA data. Correct the physical constraints of the data through power flow equation projection, and extract multi-scale dynamic features using the Fourier-wavelet transform. This transform captures the rapidly changing fault impact components in transient processes through wavelet bases, while extracting the inherent periodic dynamic features of the system using Fourier bases. This enables the accurate decomposition of multi-timescale transient trajectories and provides high-quality input features for the model to learn key dynamic patterns.
- PCDiff-TSA Model Training: Employ the Fourier projection and graph attention mechanism to encode operating states and topological structures. After dynamic gating fusion, project via the Jacobian matrix to ensure power balance, generate scenarios through system-level forward diffusion and node-level reverse diffusion, and periodically enforce physical projection closed-loop constraints.
- TSA Model Construction Based on a Balanced Dataset: Utilize unstable scenarios generated by PCDiff-TSA to supplement the original dataset, thereby constructing a balanced dataset. Integrate enhanced data such as the gradient of the Lyapunov function and the eigenvalues of the Jacobian matrix, and separate the power-angle/voltage dynamic modes through a spatiotemporal attention mechanism. Train a classification model based on the balanced dataset to improve the identification ability for unstable scenarios.
- Online Assessment: Process PMU data in real time and extract features. Assess stability through a spatiotemporal attention mechanism, physically correct the predicted trajectory, and optimize scenario generation based on energy margin feedback.
3. Results
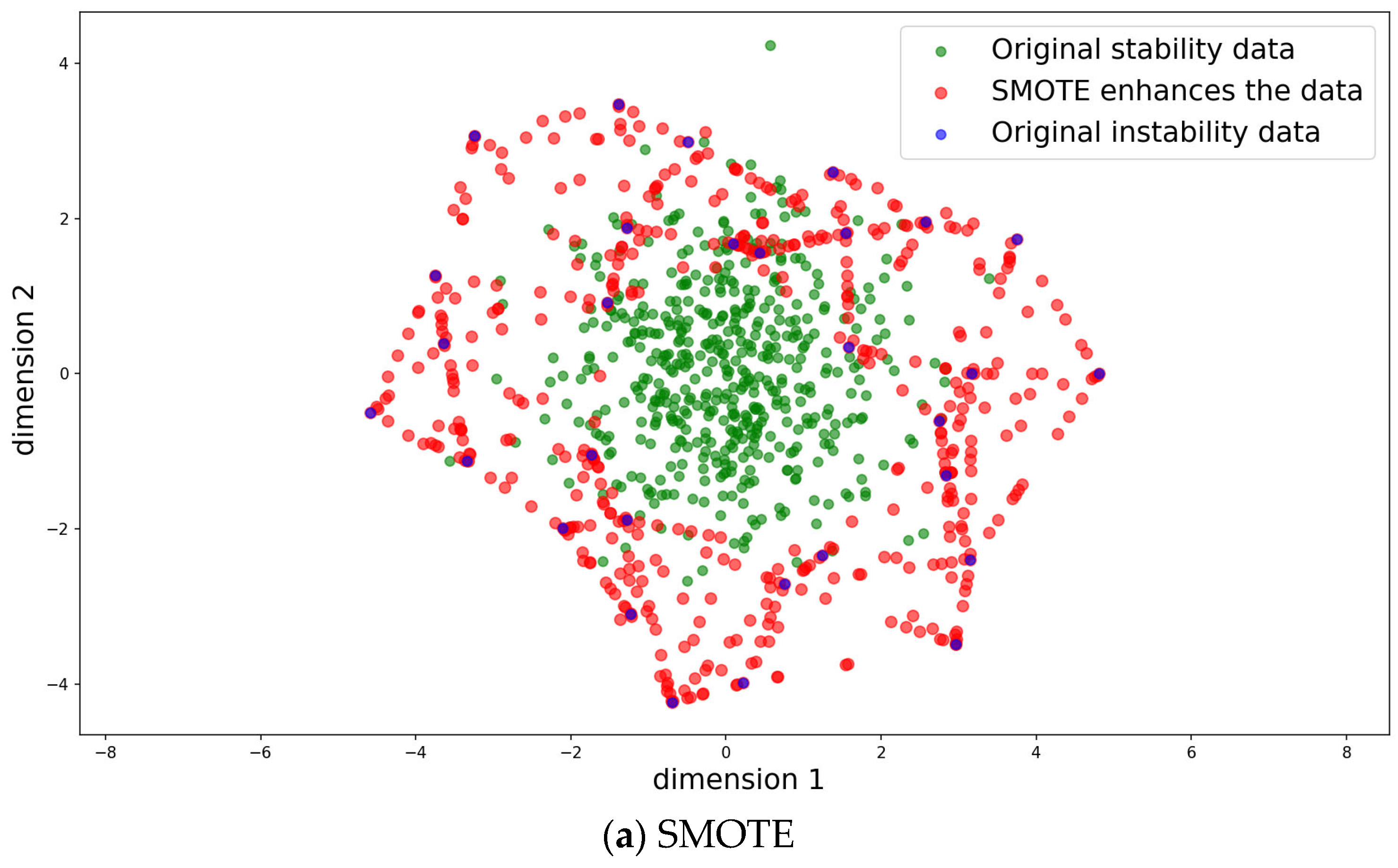
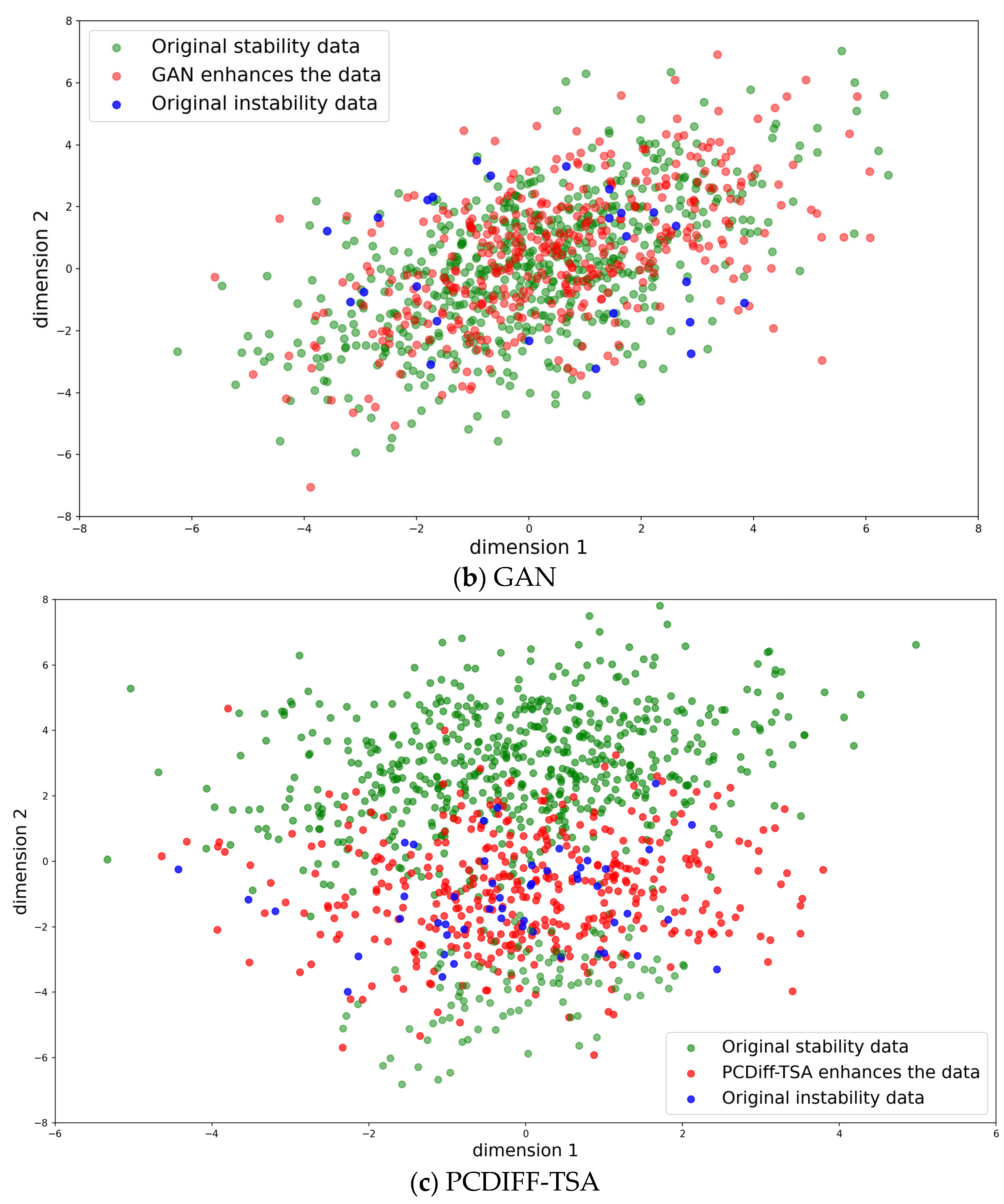
3.1. Data Generation
3.2. PCDiff-TSA Model Adoption
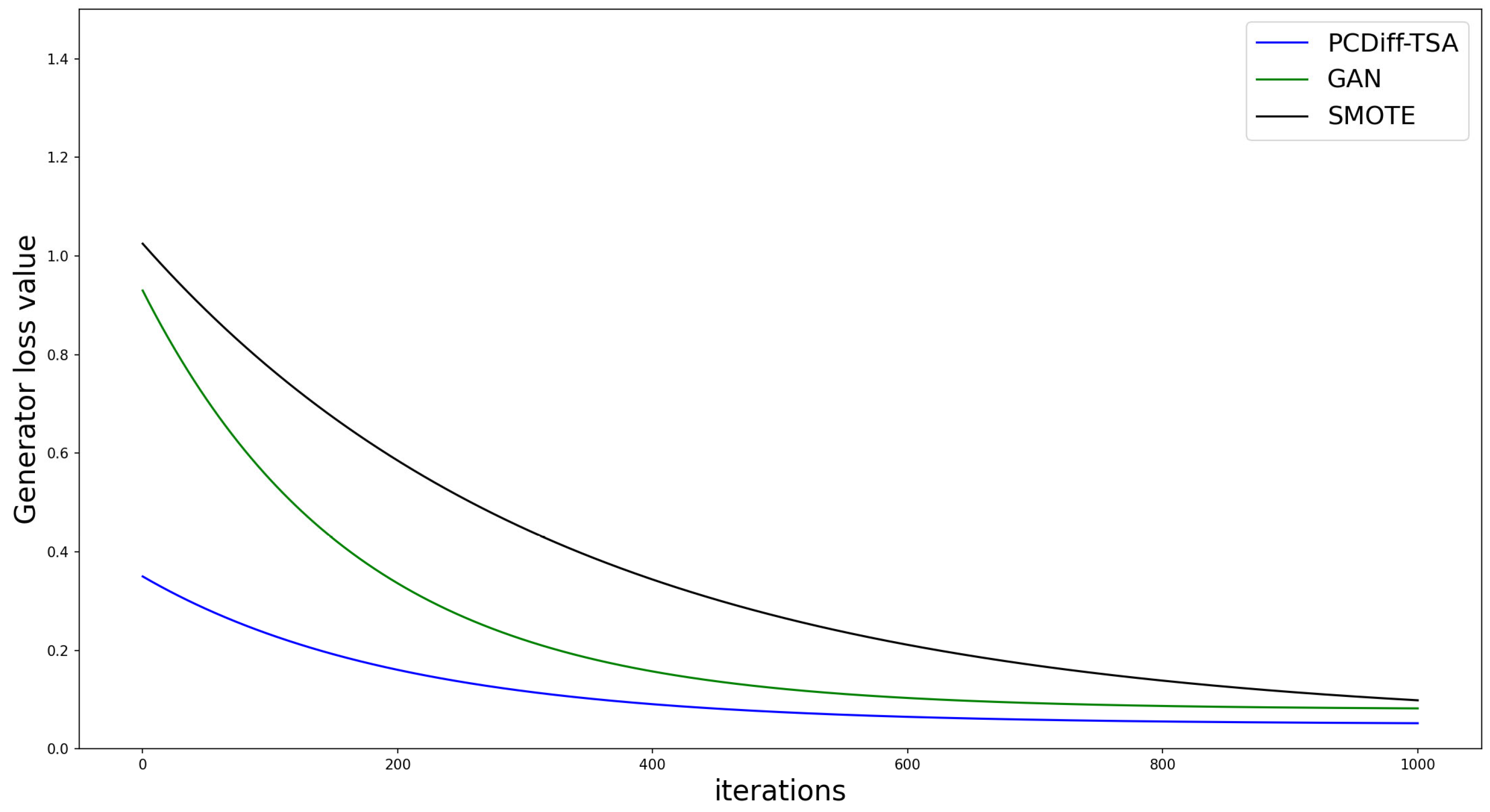
- SMOTE shows a rapid initial loss reduction (iterations 0–200: mean loss = 1.02→0.68, SD = 0.07) but maintains higher overall loss (mean = 0.42 ± 0.11 for iterations 200–1000). A one-way ANOVA confirmed significant loss differences between methods (F(2.2997) = 45.2, p < 0.001).
- The GAN exhibits a downward trend but larger fluctuations (SD = 0.15 at iteration 200) and higher terminal loss (mean = 0.18 ± 0.04 at iteration 1000) compared to PCDiff-TSA. A two-sample t-test at iteration 1000 revealed that the GAN loss was significantly higher (t(2) = 5.8, p = 0.023).
- PCDiff-TSA, leveraging pre-training for optimal initialization, achieves smoother convergence (SD < 0.05 across iterations) and the lowest terminal loss (0.12 ± 0.03). Post hoc ANOVA (Bonferroni-corrected) confirmed significant superiority over SMOTE (p < 0.001) and the GAN (p = 0.017).
3.3. Performance Testing of Scenario Expansion Method
3.4. Model Test Results Under N-2 Scenarios
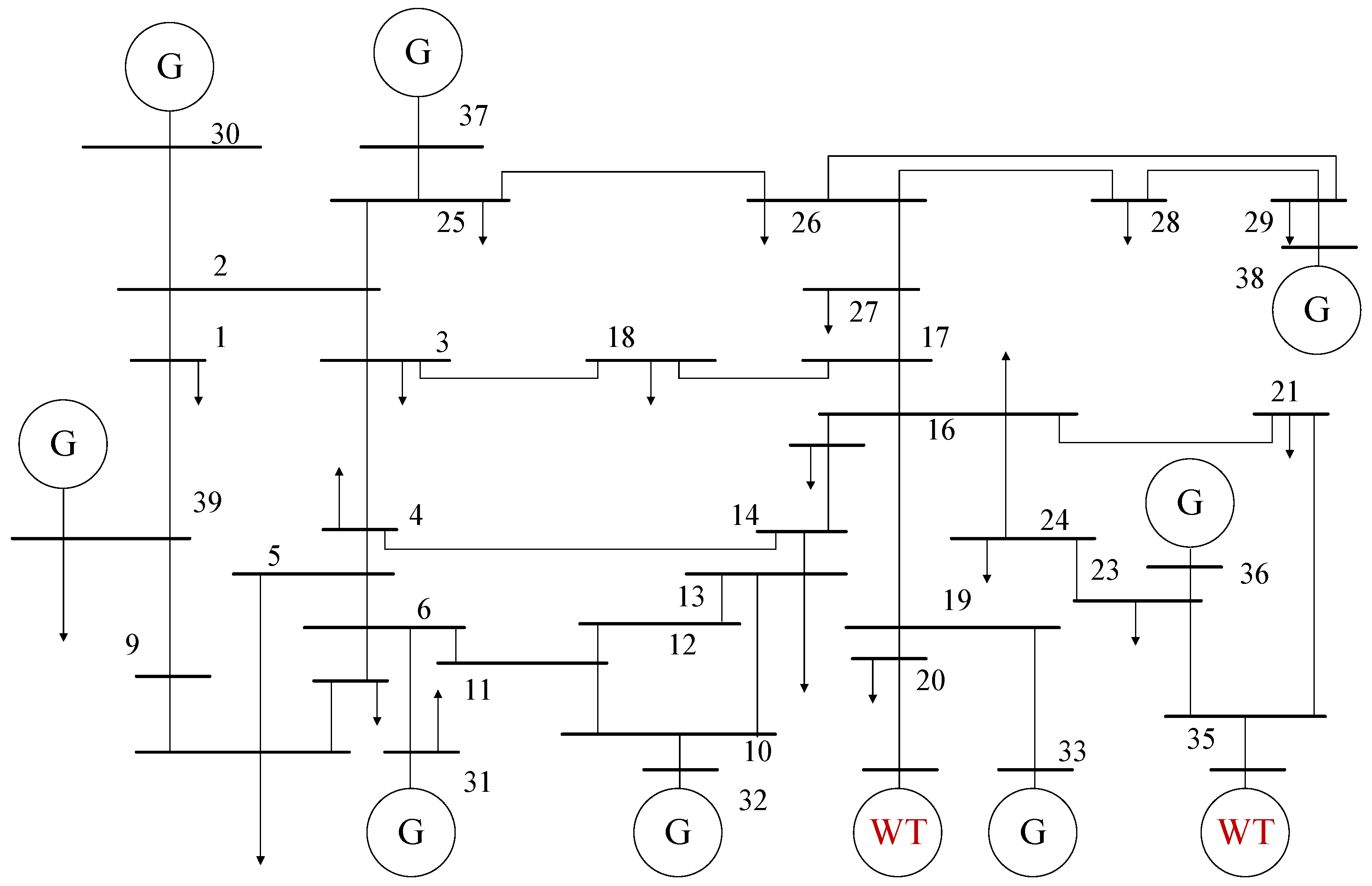
- Bus 31: This bus directly connects to a generator (G). In power system stability, generator-connected buses are critical. Removing this bus (via fault or maintenance, simulating N-2) disrupts the power supply from this generator, which can easily cause a large-scale power imbalance. Its generator’s output loss can trigger wide-range frequency and voltage issues, making it a high-risk point for instability.
- Bus 3–18 line: This transmission line connects two major subgrids (buses 3 and 18 serve as hubs). Cutting this line (N-2 event) severs the power transfer between subgrids. Given the grid’s topology, this line carries a significant amount of power flow. Disconnecting it forces power rerouting, overloading other lines and creating voltage instability or cascading outages.
- In short, bus 31 (generator hub) and the 3–18 line (inter-subgrid artery) were chosen for N-2 tests because they represent “weak links”—their failure most severely challenges grid stability, thereby fully validating the system’s resilience.
4. Discussion
4.1. Practical Application Value
4.2. Replication Feasibility
4.3. Implementation Requirements
- Equipped with phasor measurement units (PMUs) for high-precision transient data (sampling rate ≥ 50 Hz);
- Established interfaces with energy management systems (EMSs) to enable linked updates between scenario data and real-time grid states.
5. Conclusions and Outlook
- PCDiff-TSA is more suitable for scenarios with multi-dimensional electrical characteristics of power systems. By strengthening the model’s ability to learn the relationships between features and system transient stability states, it better captures the distribution patterns of original unstable cases and synthesizes more realistic, high-quality datasets. This not only provides a more reliable basis for power grid dispatching but also directly supports the formulation of targeted stability control strategies—for example, enabling the precise configuration of reserve capacity in high-risk areas prone to transient instability, reducing unnecessary equipment investment while ensuring grid security. In practical operations, it helps dispatchers accurately grasp the boundary of transient stability, thereby improving the efficiency of emergency response to faults such as new energy fluctuations and DC blocking.
- The scenarios expanded by PCDiff-TSA significantly improve the recognition accuracy of transient unstable events. With SR, UR, GMEAN, and Acc all outperforming SMOTE linear interpolation and existing GAN-based nonlinear synthesis methods, it effectively reduces the risk of cascading grid failures caused by misjudgment. In practical engineering, this means fewer unplanned power outages due to unstable scenario misrecognition, lower equipment maintenance costs resulting from prolonged overloads (e.g., reduced insulation aging of transformers and cables), and enhanced operational economy of the power system. Moreover, by accurately identifying critical unstable scenarios, it provides a solid foundation for the rational planning of power grid topology and equipment parameters, avoiding repeated modifications of newly built lines and transformers, thus reducing the secondary investment pressure on power grid enterprises.
- First, explore PCDiff-TSA’s adaptability to transient stability scenarios of multi-agent power systems under multi-energy complementary scenarios (e.g., coordination of photovoltaics, energy storage, and loads). This will reveal scenario generation laws under complex dynamics of integrated energy systems, supporting stability assessment across multi-energy networks.
- Second, integrate digital twin technology to build a “physical system–digital mirror” real-time interaction framework. PCDiff-TSA will be used to dynamically generate twin scenarios, supporting closed-loop online transient stability early warning and control decision-making, thereby improving the response speed and accuracy of real-time grid regulation.
- Third, deepen research on model interpretability. By combining causal inference theory with analysis of causal relationships in feature evolution during physics-constrained diffusion, this approach will provide more transparent and reliable mechanistic support for TSA, facilitating its large-scale application in practical power grid dispatching and control.
- Fourth, integrate control resource constraints and real-time communication to build a dynamic control adaptation framework. This includes embedding resource parameters into scenario generation for spatiotemporal control resource distribution, developing a graph neural network-based adaptive algorithm to identify real-time accessible key nodes amid topology changes, and establishing a communication delay model to quantify transmission lag impacts, ensuring timely control effectiveness and closing the “scenario generation–control optimization–real-time regulation” loop.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Z.; Hui, H.; Song, Y. Response Capacity Allocation of Air Conditioners for Peak-Valley Regulation Considering Interaction with Surrounding Microclimate. IEEE Trans. Smart Grid 2024, 16, 1155–1167. [Google Scholar] [CrossRef]
- Wang, K.; Wang, C.; Yao, W.; Zhang, Z.; Liu, C.; Dong, X.; Yang, M.; Wang, Y. Embedding P2P transaction into demand response exchange: A cooperative demand response management framework for IES. Appl. Energy 2024, 367, 123319. [Google Scholar] [CrossRef]
- Yu, Y.; Guo, J.; Jin, Z. Optimal Extreme Random Forest Ensemble for Active Distribution Network Forecasting-Aided State Estimation Based on Maximum Average Energy Concentration VMD State Decomposition. Energies 2023, 16, 5659. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, H.; Sheng, H.; Huang, T.; Zhao, T.; Liu, Y.; Kong, S.; Zhang, L. Optimal Operation of Renewable Energy Bases Considering Short-Circuit Ratio and Transient Overvoltage Constraints. Energies 2025, 18, 1256. [Google Scholar] [CrossRef]
- Tong, H.; Zeng, X.; Yu, K.; Zhou, Z. A Fault Identification Method for Animal Electric Shocks Considering Unstable Contact Situations in Low-Voltage Distribution Grids. IEEE Trans. Ind. Inform. 2025, 21, 4039–4050. [Google Scholar] [CrossRef]
- Xia, Y.; Li, Z.; Xi, Y.; Wu, G.; Peng, W.; Mu, L. Accurate Fault Location Method for Multiple Faults in Transmission Networks Using Travelling Waves. IEEE Trans. Ind. Inform. 2024, 20, 8717–8728. [Google Scholar] [CrossRef]
- Liu, J.; Liu, J.; Yan, R.; Ding, T. Deep Lyapunov Learning: Embedding the Lyapunov Stability Theory in Interpretable Neural Networks for Transient Stability Assessment. IEEE Trans. Power Syst. 2024, 39, 7437–7440. [Google Scholar] [CrossRef]
- Tang, C.K.; Graham, C.E.; El-Kady, M.; Alden, R.T.H. Transient stability index from conventional time domain simulation. IEEE Trans. Power Syst. 1994, 9, 1524–1530. [Google Scholar] [CrossRef]
- Luo, C.; Liao, S.; Chen, Y.; Huang, M. Quantitative Transient Stability Analysis for Parallel Grid-Tied Grid-Forming Inverters Considering Reactive Power Control. IEEE Trans. Power Electron. 2025, 40, 4780–4786. [Google Scholar] [CrossRef]
- Yaghoubi, E.; Maghami, M.R.; Jahromi, M.Z. Comprehensive technical risk indices and advanced methodologies for power system risk management. Electr. Power Syst. Res. 2025, 244, 111534. [Google Scholar] [CrossRef]
- Kim, J.; Lee, H.; Kim, S.; Chung, S.-H.; Park, J.H. Transient Stability Assessment Using Deep Transfer Learning. IEEE Access 2023, 11, 116622–116637. [Google Scholar] [CrossRef]
- Su, T.; Liu, Y.; Zhao, J.; Liu, J. Deep Belief Network Enabled Surrogate Modeling for Fast Preventive Control of Power System Transient Stability. IEEE Trans. Ind. Inform. 2022, 18, 315–326. [Google Scholar] [CrossRef]
- He, C.; He, X.; Geng, H.; Sun, H.; Xu, S. Transient Stability of Low-Inertia Power Systems with Inverter-Based Generation. IEEE Trans. Energy Convers. 2022, 37, 2903–2912. [Google Scholar] [CrossRef]
- Hu, W.; Lu, Z.; Wu, S.; Zhang, W.; Dong, Y.; Yu, R.; Liu, B. Real-Time transient stability assessment in power system based on improved SVM. J. Mod. Power Syst. Clean Energy 2019, 7, 26–37. [Google Scholar] [CrossRef]
- Xia, S.; Zhang, C.; Li, Y.; Li, G. GCN-LSTM Based Transient Angle Stability Assessment Method for Future Power Systems Considering Spatial-Temporal Disturbance Response Characteristics. Protec. Control Mod. Power Syst. 2024, 9, 108–121. [Google Scholar] [CrossRef]
- Li, H.; Wang, Z.; Jin, T.; Xu, X.; Shi, L. A Novel Data-Driven Method of Real-Time Transient Stability Assessment for AC/DC Hybrid Power Systems. IEEE Access 2025, 13, 80748–80758. [Google Scholar] [CrossRef]
- Hu, H.; Yu, S.S.; Trinh, H. A review of uncertainties in power systems—Modeling, impact, and mitigation. Designs 2024, 8, 10. [Google Scholar] [CrossRef]
- Rajendran, G.; Raute, R.; Caruana, C. A Comprehensive Review of Solar PV Integration with Smart-Grids: Challenges, Standards, and Grid Codes. Energies 2025, 18, 2221. [Google Scholar] [CrossRef]
- Peng, F.Z.; Liu, C.C.; Li, Y.; Jain, A.K. Envisioning the future renewable and resilient energy grids—A power grid revolution enabled by renewables, energy storage, and energy electronics. IEEE J. Emerg. Sel. Top. Ind. Electron. 2023, 5, 8–26. [Google Scholar] [CrossRef]
- Qudsi, O.A.; Soeprijanto, A.; Priyadi, A. Virtual inertia calculation and virtual power system stabiliser design for stability enhancement of virtual synchronous generator system under transient condition. IET Energy Syst. Integr. 2024, 6, 903–917. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, D.; Qiao, J.; Wang, X.; Zhang, Z. Preventive control for power system transient security based on XGBoost and DCOPF with consideration of model interpretability. CSEE J. Power Energy Syst. 2021, 7, 279–294. [Google Scholar]
- Tan, B.; Yang, J.; Tang, Y.; Jiang, S.; Xie, P.; Yuan, W. A Deep Imbalanced Learning Framework for Transient Stability Assessment of Power System. IEEE Access 2019, 7, 81759–81769. [Google Scholar] [CrossRef]
- Su, B.; Hu, X.; Zha, Y.; Wu, Z. Zero-Shot Low-Dose CT Image Denoising via Patch-Based Content-Guided Diffusion Models. IEEE Trans. Instrum. Meas. 2025, 74, 1–12. [Google Scholar] [CrossRef]
- Badanoiu, A.-I.; Stoleriu, S.-P.; Carocea, A.-C.; Eftimie, M.-A.; Trusca, R. Influence of Synthesis Route on Composition and Main Properties of Mullite Ceramics Based on Waste. Materials 2025, 18, 1098. [Google Scholar] [CrossRef] [PubMed]
- Su, Z.; Yang, G.; Yao, L. Transient Frequency Modeling and Characteristic Analysis of Virtual Synchronous Generator. Energies 2025, 18, 1098. [Google Scholar] [CrossRef]
- Despotuli, A.; Kazmiruk, V.; Despotuli, A.; Andreeva, A. A Novel Concept of High-Voltage Balancing on Series-Connected Transistors for Use in High-Speed Instrumentation. Energies 2025, 18, 1084. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Batch Size | 32 | Noise schedule | 0.0001/0.02 |
| Epochs | 1000 | Type of loss function | MSE + Wasserstein GAN |
| Pre-training Epochs | 100 | Code network parameters | 3 |
| Latent Dimension | 128 | Diffusion steps | 600 |
| Network Layer Breakdown | Encoder: 3—layer CNN Diffusion block: U-Net with Self-Attention Decoder: 2-layer transformer | Attention mechanism | Self-attention in diffusion block: Focuses on generator rotor angle correlations |
| Physical Constraint Design | Loss function modified with power flow penalty: Total Loss = MSE + λ × (Pcalc-Pmeasured) (λ = 0.1, enforces Ohm’s law compliance). | ||
| Data Augmentation Methods | SR/% | UR/% | GMEAN/% | ACC/% |
|---|---|---|---|---|
| No data augmentation | 99.78 | 85.43 | 91.74 | 99.04 |
| SMOTE | 99.31 | 94.85 | 96.78 | 99.07 |
| GAN | 99.46 | 96.12 | 97.55 | 99.17 |
| PCDIFF-TSA | 99.78 | 98.77 | 99.33 | 99.76 |
| Data Augmentation Methods | SR/% | UR/% | GMEAN/% | ACC/% |
|---|---|---|---|---|
| No data augmentation | 99.67 | 78.33 | 88.76 | 97.06 |
| PCDIFF-TSA | 98.45 | 96.89 | 97.85 | 98.62 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, W.; Yu, Y.; Zhao, L.; Hua, W.; Yang, Y.; Wang, B.; Cao, J.; Li, C. Physics-Constrained Diffusion-Based Scenario Expansion Method for Power System Transient Stability Assessment. Processes 2025, 13, 2344. https://doi.org/10.3390/pr13082344
Dong W, Yu Y, Zhao L, Hua W, Yang Y, Wang B, Cao J, Li C. Physics-Constrained Diffusion-Based Scenario Expansion Method for Power System Transient Stability Assessment. Processes. 2025; 13(8):2344. https://doi.org/10.3390/pr13082344
Chicago/Turabian StyleDong, Wei, Yue Yu, Lebing Zhao, Wen Hua, Ying Yang, Bowen Wang, Jiawen Cao, and Changgang Li. 2025. "Physics-Constrained Diffusion-Based Scenario Expansion Method for Power System Transient Stability Assessment" Processes 13, no. 8: 2344. https://doi.org/10.3390/pr13082344
APA StyleDong, W., Yu, Y., Zhao, L., Hua, W., Yang, Y., Wang, B., Cao, J., & Li, C. (2025). Physics-Constrained Diffusion-Based Scenario Expansion Method for Power System Transient Stability Assessment. Processes, 13(8), 2344. https://doi.org/10.3390/pr13082344