

Event-Based Dissipative Fuzzy Tracking Control for Nonlinear Networked Systems with Dynamic Quantization and Stochastic Deception Attacks


Abstract
1. Introduction
- (1)
- The dissipative output feedback tracking control problem has been considered for discrete-time nonlinear networked systems with dynamic quantization and stochastic deception attacks.
- (2)
- Both the event-triggered scheme and the dynamic quantization scheme with general online adjustment rule are introduced to decrease the data transmission amount and achieve the rational use of the limited communication and computation resources rather than only the event-triggered scheme or quantization scheme.
- (3)
- Based on the decoupling strategy, the corresponding design conditions of the desired static output feedback tracking controller are proposed in the form of linear matrix inequalities, rather than the specific design algorithm or the design conditions in terms of linear matrix inequality subject to restricted system matrices.
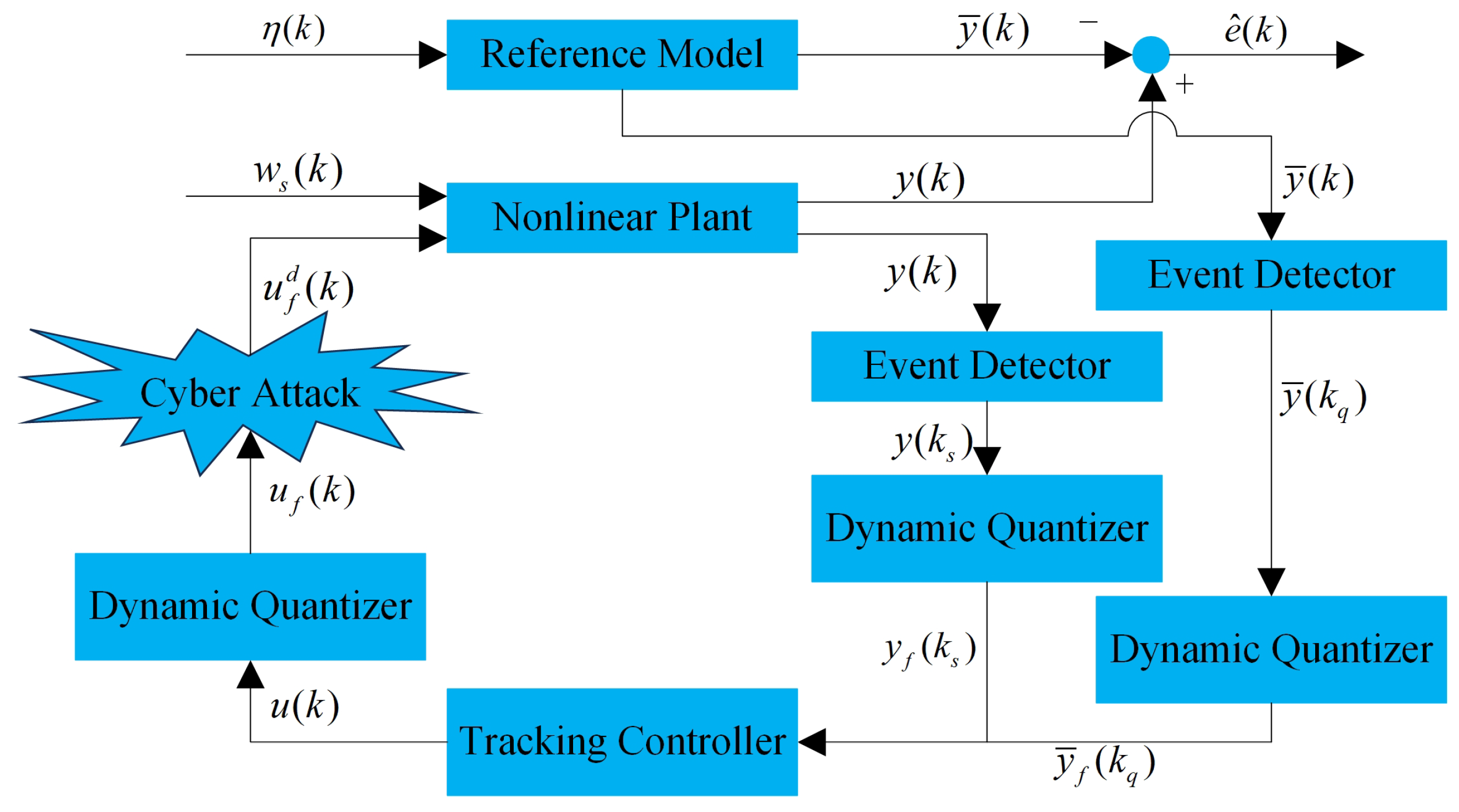
2. Problem Formulation
2.1. T-S Fuzzy Systems
2.2. Reference Model
2.3. Event-Triggered Communication Scheme
2.4. Dynamic Quantizers
2.5. Deception Attacks
2.6. Tracking Controller and Resulting System
- (1)
- The stochastic stability of the resulting system in (17) is guaranteed for .
- (2)
- The given dissipative tracking performance of the resulting system in (17) is guaranteed for the zero initial condition.
3. Main Results
3.1. Dissipative Tracking Performance Analysis
3.2. Tracking Controller Design
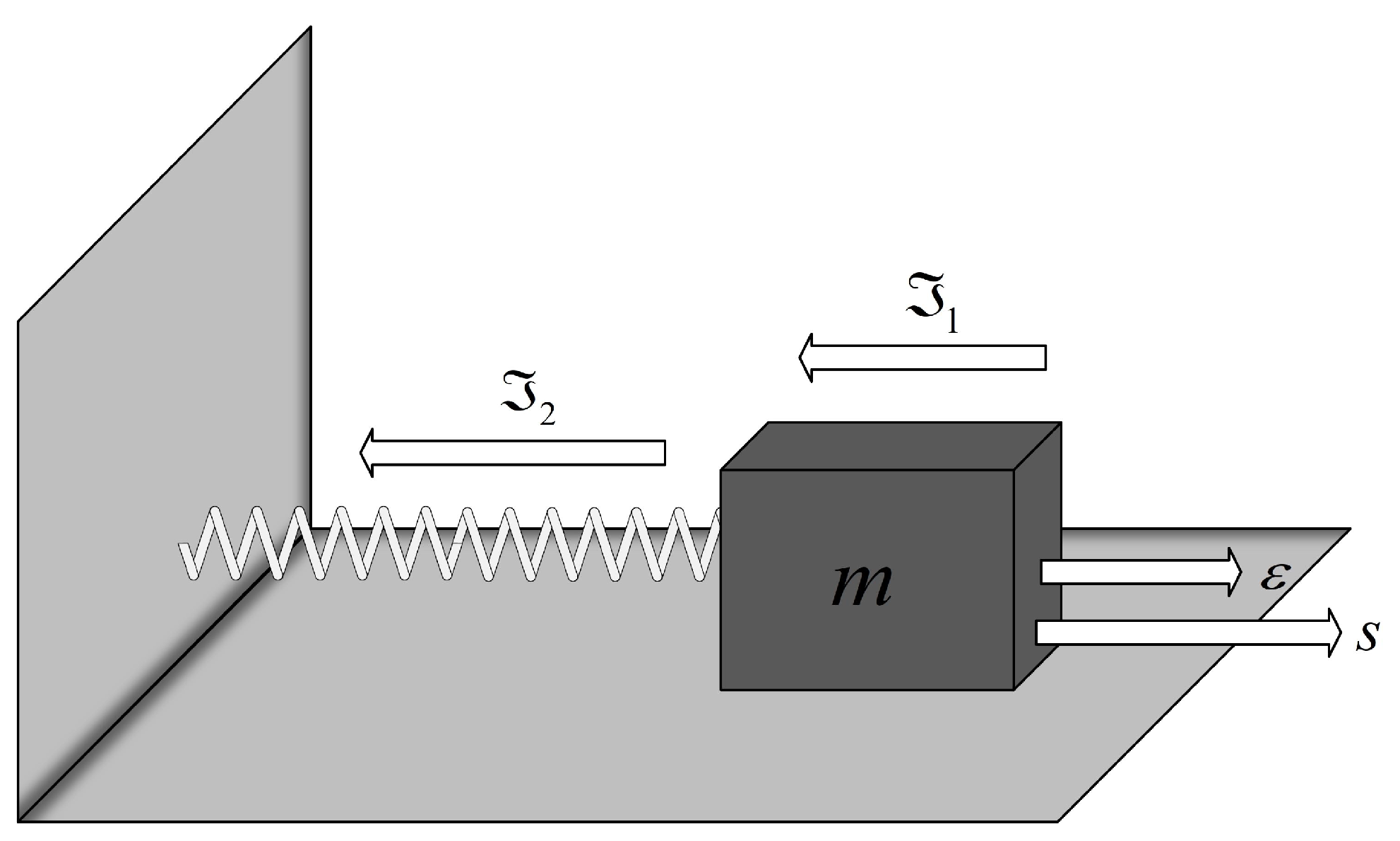
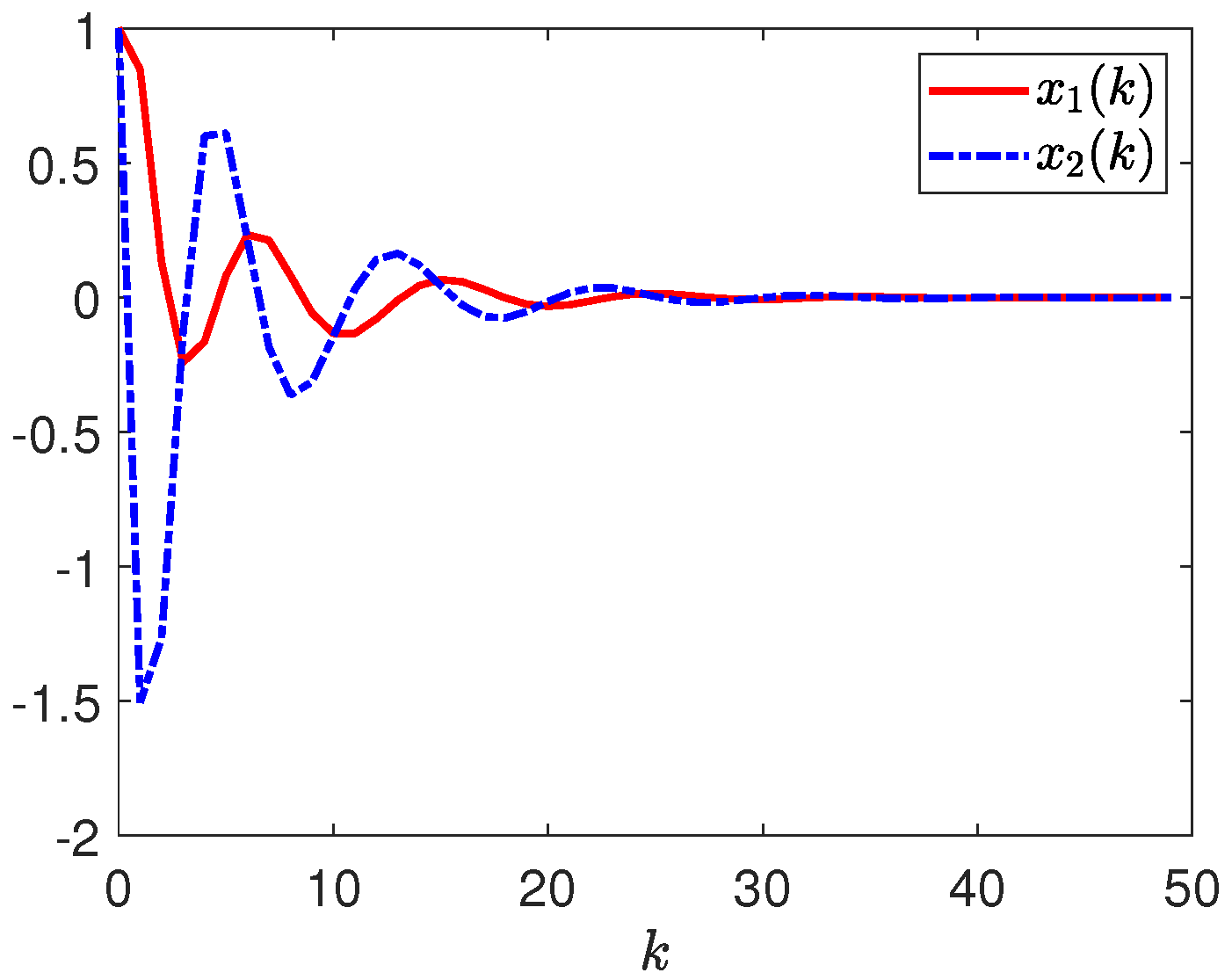
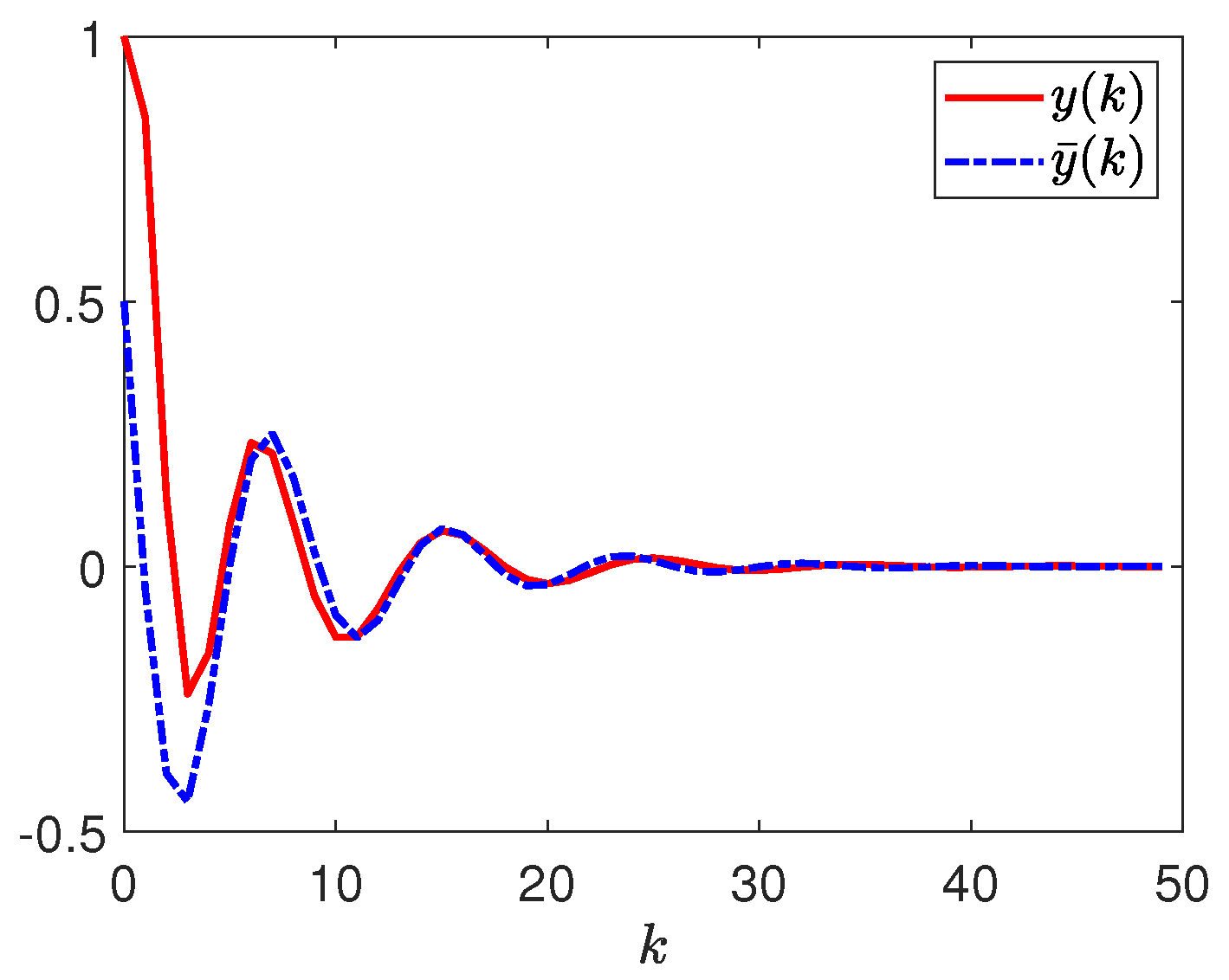
4. Simulation Examples
- (1)
- In contrast the with the quantized tracking control problem addressed in [25,39], where only quantized input or multiple quantized outputs were considered, the tracking control problem with quantized input and outputs studied herein is more complicated. Additionally, for , the employed dynamic quantization scheme herein will be reduced to the one in [5,38,39] by setting and will be reduced to the one in [16,34] by choosing . As a result, the employed dynamic quantization scheme herein is more relaxed than the one in [5,16,34,38,39].
- (2)
- Based the simulation results in Figure 10, Figure 11, Figure 13, and Figure 14, one is able to conclude that the communication burden for the measurement outputs and was significantly reduced by introducing the event-triggered conditions given in (6) and (7), respectively. In contrast with the event-triggered communication scheme proposed in [23,35,36], where a specific event-triggered condition is utilized to reduce the communication burden of the augmented variable of the states, the one employed herein is more general. Additionally, the minimum tracking performances displayed in Table 1, Table 2 and Table 3 illustrate that the employed event-triggered communication scheme herein is less conservative than the one utilized in [37].
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.-M.; Han, Q.-L.; Ge, X.; Ding, D.; Ding, L.; Yue, D.; Peng, C. Networked control systems: A survey of trends and techniques. IEEE/CAA J. Autom. Sin. 2020, 7, 1–17. [Google Scholar] [CrossRef]
- Zhang, X.-M.; Han, Q.-L.; Ge, X. A novel approach to ∞ performance analysis of discrete-time networked systems subject to network-induced delays and malicious packet dropouts. Automatica 2022, 136, 110010. [Google Scholar] [CrossRef]
- Liberzon, D. Hybrid feedback stabilization of systems with quantized signals. Automatica 2003, 39, 1543–1554. [Google Scholar] [CrossRef]
- Niu, Y.; Ho, D.W.C. Control strategy with adaptive quantizer’s parameters under digital communication channels. Automatica 2014, 50, 2665–2671. [Google Scholar] [CrossRef]
- Chang, X.-H.; Xiong, J.; Li, Z.-M.; Park, J.H. Quantized static output feedback control for discrete-time systems. IEEE Trans. Ind. Inform. 2018, 14, 3426–3435. [Google Scholar] [CrossRef]
- Xiong, J.; Chang, X.-H.; Park, J.H.; Li, Z.-M. Nonfragile fault-tolerant control of suspension systems subject to input quantization and actuator fault. Int. J. Robust Nonlinear Control 2020, 30, 6720–6743. [Google Scholar] [CrossRef]
- Zheng, B.-C.; Yu, X.; Xue, Y. Quantized feedback sliding-mode control: An event-triggered approach. Automatica 2018, 91, 126–135. [Google Scholar] [CrossRef]
- Yang, H.; Xu, Y.; Zhang, J. Event-driven control for networked control systems with quantization and Markov packet losses. IEEE Trans. Cybern. 2017, 47, 2235–2243. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.; Nekouei, E. Quantization and event-triggered policy design for encrypted networked control. IEEE/CAA J. Autom. Sin. 2024, 11, 946–955. [Google Scholar] [CrossRef]
- Wu, C.; Zhao, X.; Wang, B.; Xing, W.; Liu, L.; Wang, X. Model-based dynamic event-triggered control for cyber-physical systems subject to dynamic quantization and DoS attacks. IEEE Trans. Netw. Sci. Eng. 2022, 9, 2406–2417. [Google Scholar] [CrossRef]
- Zhang, X.-M.; Han, Q.-L.; Zhang, B.-L.; Ge, X.; Zhang, D. Accumulated-state-error-based event-triggered sampling scheme and its application to ∞ control of sampled-data systems. Sci. China Inf. Sci. 2024, 67, 162206. [Google Scholar] [CrossRef]
- Zha, L.; Liao, R.; Liu, J.; Xie, X.; Tian, E.; Cao, J. Dynamic event-triggered output feedback control for networked systems subject to multiple cyber attacks. IEEE Trans. Cybern. 2022, 52, 13800–13808. [Google Scholar] [CrossRef] [PubMed]
- Dong, J.; Yang, G.-H. Static output feedback ∞ control of a class of nonlinear discrete-time systems. Fuzzy Sets Syst. 2009, 160, 2844–2859. [Google Scholar] [CrossRef]
- Chang, X.-H.; Zhang, L.; Park, J.H. Robust static output feedback ∞ control for uncertain fuzzy systems. Fuzzy Sets Syst. 2015, 273, 87–104. [Google Scholar] [CrossRef]
- Choi, H.D.; Ahn, C.K.; Shi, P.; Wu, L.; Lim, M.T. Dynamic output-feedback dissipative control for T-S fuzzy systems with time-varying input delay and output constraints. IEEE Trans. Fuzzy Syst. 2017, 25, 511–526. [Google Scholar] [CrossRef]
- Chang, X.-H.; Yang, C.; Xiong, J. Quantized fuzzy output feedback ∞ control for nonlinear systems with adjustment of dynamic parameters. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2005–2015. [Google Scholar] [CrossRef]
- Shen, M.; Gu, Y.; Zhu, S.; Zong, G.; Zhao, X. Mismatched quantized ∞ output-feedback control of fuzzy Markov jump systems with a dynamic guaranteed cost triggering scheme. IEEE Trans. Fuzzy Syst. 2024, 32, 1681–1692. [Google Scholar] [CrossRef]
- Liu, J.; Wei, L.; Xie, X.; Tian, E.; Fei, S. Quantized stabilization for T-S fuzzy systems with hybrid-triggered mechanism and stochastic cyber-attacks. IEEE Trans. Fuzzy Syst. 2018, 26, 3820–3834. [Google Scholar] [CrossRef]
- Pan, Y.; Wu, Y.; Lam, H.-K. Security-based fuzzy control for nonlinear networked control systems with DoS attacks via a resilient event-triggered scheme. IEEE Trans. Fuzzy Syst. 2022, 30, 4359–4368. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, P.; Lee, S.; Xie, X. Observer-based adaptive event-triggered control for interval type-2 fuzzy systems under multiple cyber-attacks. IEEE Trans. Fuzzy Syst. 2024, 32, 2438–2447. [Google Scholar] [CrossRef]
- Yang, Y.; Wen, B.; Su, X.; Huang, J.; Liu, B. Sliding mode fuzzy control of stochastic nonlinear systems under cyber-attacks. IEEE Trans. Cybern. 2024, 54, 3174–3182. [Google Scholar] [CrossRef] [PubMed]
- Gao, H.; Chen, T. Network-based ∞ output tracking control. IEEE Trans. Autom. Control 2008, 53, 655–667. [Google Scholar] [CrossRef]
- Yan, H.; Hu, C.; Zhang, H.; Karimi, H.R.; Jiang, X.; Liu, M. ∞ output tracking control for networked systems with adaptively adjusted event-triggered scheme. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2050–2058. [Google Scholar] [CrossRef]
- Liu, S.; Wei, G.; Song, Y.; Liu, Y. Error-constrained reliable tracking control for discrete time-varying systems subject to quantization effects. Neurocomputing 2016, 174, 897–905. [Google Scholar] [CrossRef]
- Li, Y.-X.; Yang, G.-H. Adaptive asymptotic tracking control of uncertain nonlinear systems with input quantization and actuator faults. Automatica 2016, 72, 177–185. [Google Scholar] [CrossRef]
- Lian, K.-Y.; Liou, J.-J. Output tracking control for fuzzy systems via output feedback design. IEEE Trans. Fuzzy Syst. 2006, 14, 628–639. [Google Scholar] [CrossRef]
- Dong, J.; Wang, S. Robust ∞-tracking control design for T-S fuzzy systems with partly immeasurable premise variables. J. Frankl. Inst. 2017, 354, 3919–3944. [Google Scholar] [CrossRef]
- Wang, Y.; Karimi, H.R.; Lam, H.-K.; Yan, H. Fuzzy output tracking control and filtering for nonlinear discrete-time descriptor systems under unreliable communication links. IEEE Trans. Cybern. 2020, 50, 2369–2379. [Google Scholar] [CrossRef]
- Zeng, H.-B.; Zhu, Z.-J.; Peng, T.-S.; Wang, W.; Zhang, X.-M. Robust tracking control design for a class of nonlinear networked control systems considering bounded package dropouts and external disturbance. IEEE Trans. Fuzzy Syst. 2024, 32, 3608–3617. [Google Scholar] [CrossRef]
- Li, H.; Wu, C.; Jing, X.; Wu, L. Fuzzy tracking control for nonlinear networked systems. IEEE Trans. Cybern. 2017, 47, 2020–2031. [Google Scholar] [CrossRef]
- Zhang, D.; Han, Q.-L.; Jia, X. Network-based output tracking control for a class of T-S fuzzy systems that can not be stabilized by nondelayed output feedback controllers. IEEE Trans. Cybern. 2015, 45, 1511–1524. [Google Scholar] [CrossRef] [PubMed]
- Song, J.; Niu, Y.; Lam, J.; Lam, H.-K. Fuzzy remote tracking control for randomly varying local nonlinear models under fading and missing measurements. IEEE Trans. Fuzzy Syst. 2018, 26, 1125–1137. [Google Scholar] [CrossRef]
- Li, Z.-M.; Park, J.H. Dissipative fuzzy tracking control for nonlinear networked systems with quantization. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 5130–5141. [Google Scholar] [CrossRef]
- Li, Z.; Lu, C.; Wang, H. Non-fragile fuzzy tracking control for nonlinear networked systems with dynamic quantization and randomly occurring gain variations. Mathematics 2023, 11, 1116. [Google Scholar] [CrossRef]
- Zhang, D.; Han, Q.-L.; Jia, X. Network-based output tracking control for T-S fuzzy systems using an event-triggered communication scheme. Fuzzy Sets Syst. 2015, 273, 26–48. [Google Scholar] [CrossRef]
- Gu, Z.; Yue, D.; Liu, J.; Ding, Z. ∞ tracking control of nonlinear networked systems with a novel adaptive event-triggered communication scheme. J. Frankl. Inst. 2017, 354, 3540–3553. [Google Scholar] [CrossRef]
- Li, Z.-M.; Chang, X.-H.; Park, J.H. Quantized static output feedback fuzzy tracking control for discrete-time nonlinear networked systems with asynchronous event-triggered constraints. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3820–3831. [Google Scholar] [CrossRef]
- Li, Z.-M.; Chang, X.-H.; Xiong, J. Event-based fuzzy tracking control for nonlinear networked systems subject to dynamic quantization. IEEE Trans. Fuzzy Syst. 2023, 31, 941–954. [Google Scholar] [CrossRef]
- Liu, X.-M.; Chang, X.-H. Adaptive event-triggered tracking control for nonlinear networked systems with dynamic quantization and deception attacks. Int. J. Robust And Nonlinear Control 2024, 34, 8311–8333. [Google Scholar] [CrossRef]
- Chen, Y.; Lu, C.; Zhang, X.-M. Allowable delay set flexible fragmentation approach to passivity analysis of delayed neural networks. Neurocomputing 2025, 629, 129730. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| () | 10 | 30 | 50 | 70 | 90 |
|---|---|---|---|---|---|
| Theorem 2 | 0.6496 | 0.6341 | 0.6327 | 0.6323 | 0.6321 |
| [37] | 0.6746 | 0.6396 | 0.6377 | 0.6373 | 0.6372 |
| () | 0.1 | 0.3 | 0.5 | 0.7 | 0.9 |
|---|---|---|---|---|---|
| Theorem 2 | 0.6327 | 0.6387 | 0.6496 | 0.6651 | 0.6849 |
| [37] | 0.6377 | 0.6487 | 0.6746 | 0.7180 | 0.7804 |
| 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | |
|---|---|---|---|---|---|
| Theorem 2 | 0.6496 | 0.6499 | 0.6507 | 0.6522 | 0.6544 |
| [37] | 0.6746 | 0.6748 | 0.6756 | 0.6771 | 0.6793 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, S.; Li, Z.; Jiang, T. Event-Based Dissipative Fuzzy Tracking Control for Nonlinear Networked Systems with Dynamic Quantization and Stochastic Deception Attacks. Processes 2025, 13, 1902. https://doi.org/10.3390/pr13061902
Fang S, Li Z, Jiang T. Event-Based Dissipative Fuzzy Tracking Control for Nonlinear Networked Systems with Dynamic Quantization and Stochastic Deception Attacks. Processes. 2025; 13(6):1902. https://doi.org/10.3390/pr13061902
Chicago/Turabian StyleFang, Shuai, Zhimin Li, and Tianwei Jiang. 2025. "Event-Based Dissipative Fuzzy Tracking Control for Nonlinear Networked Systems with Dynamic Quantization and Stochastic Deception Attacks" Processes 13, no. 6: 1902. https://doi.org/10.3390/pr13061902
APA StyleFang, S., Li, Z., & Jiang, T. (2025). Event-Based Dissipative Fuzzy Tracking Control for Nonlinear Networked Systems with Dynamic Quantization and Stochastic Deception Attacks. Processes, 13(6), 1902. https://doi.org/10.3390/pr13061902