

Fuzzy Disturbance Observer-Based Adaptive Nonsingular Terminal Sliding Mode Control for Multi-Joint Robotic Manipulators


Abstract
1. Introduction
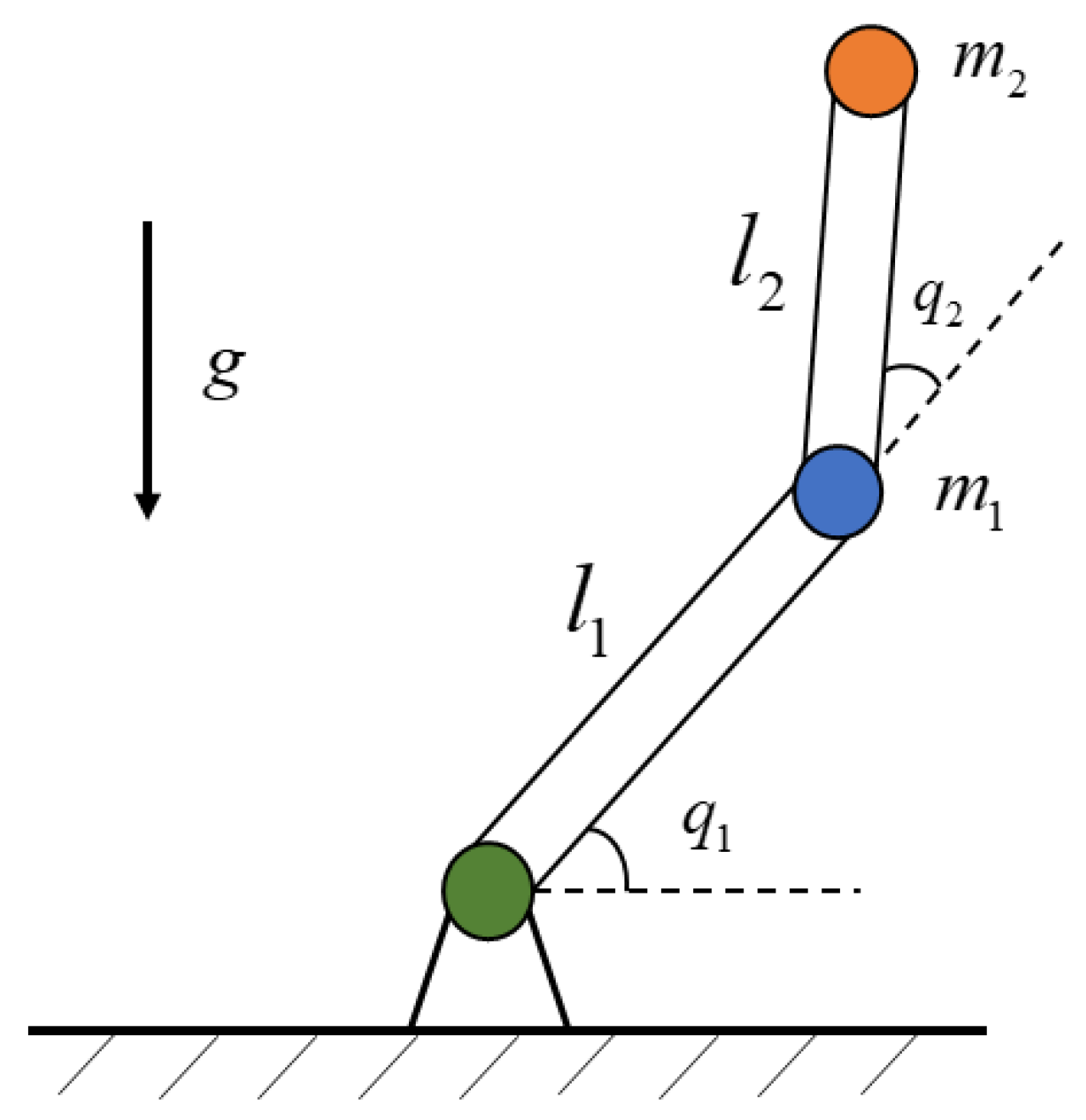
2. Dynamic Model of the Manipulator
3. Fuzzy Disturbance Observer Design (FDO)
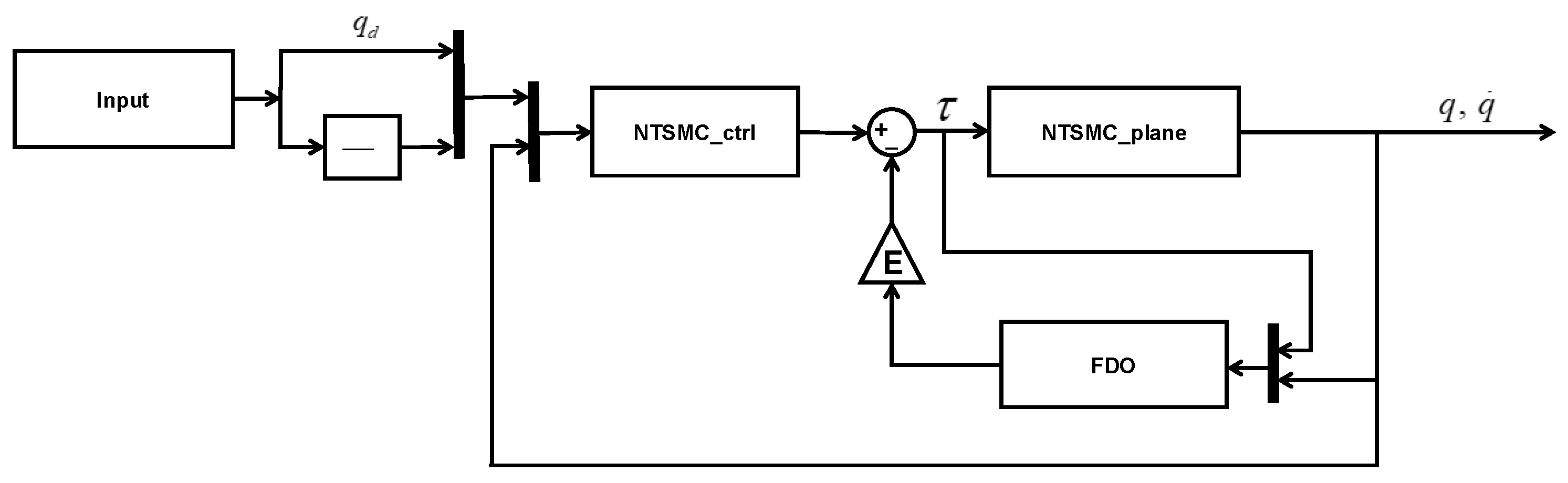
4. Adaptive Terminal Sliding Mode Control Design
5. Finite Time Convergence Analysis
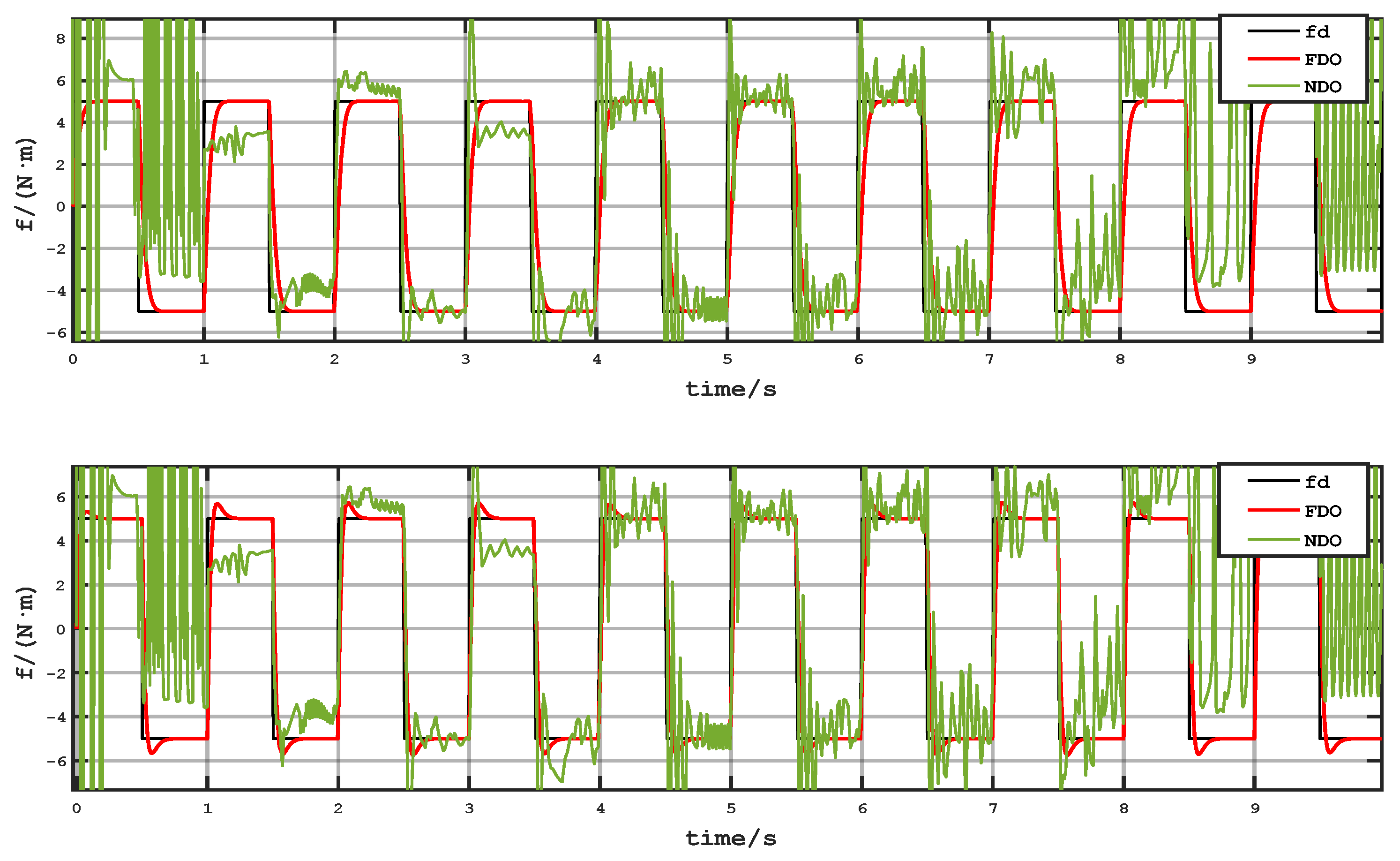
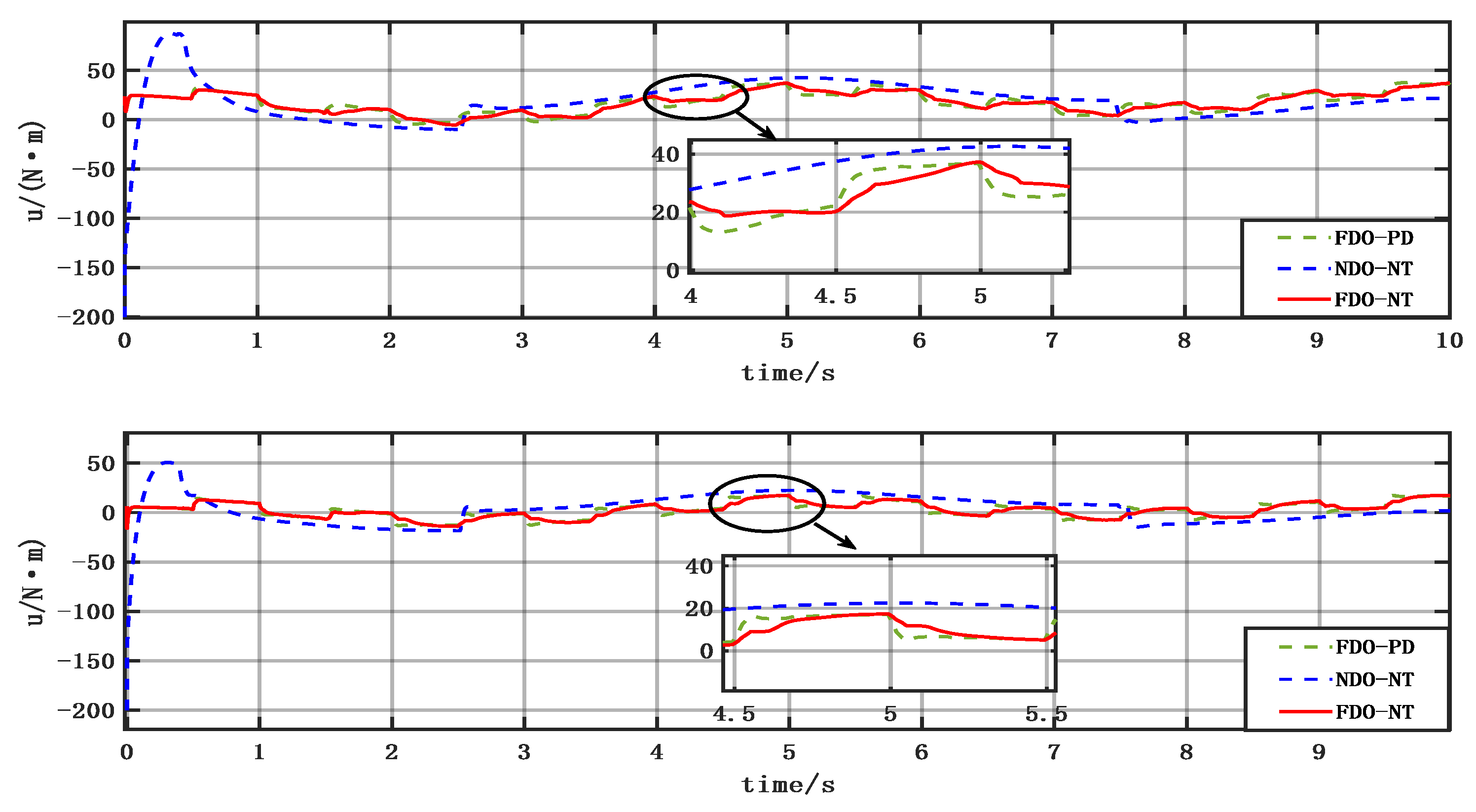
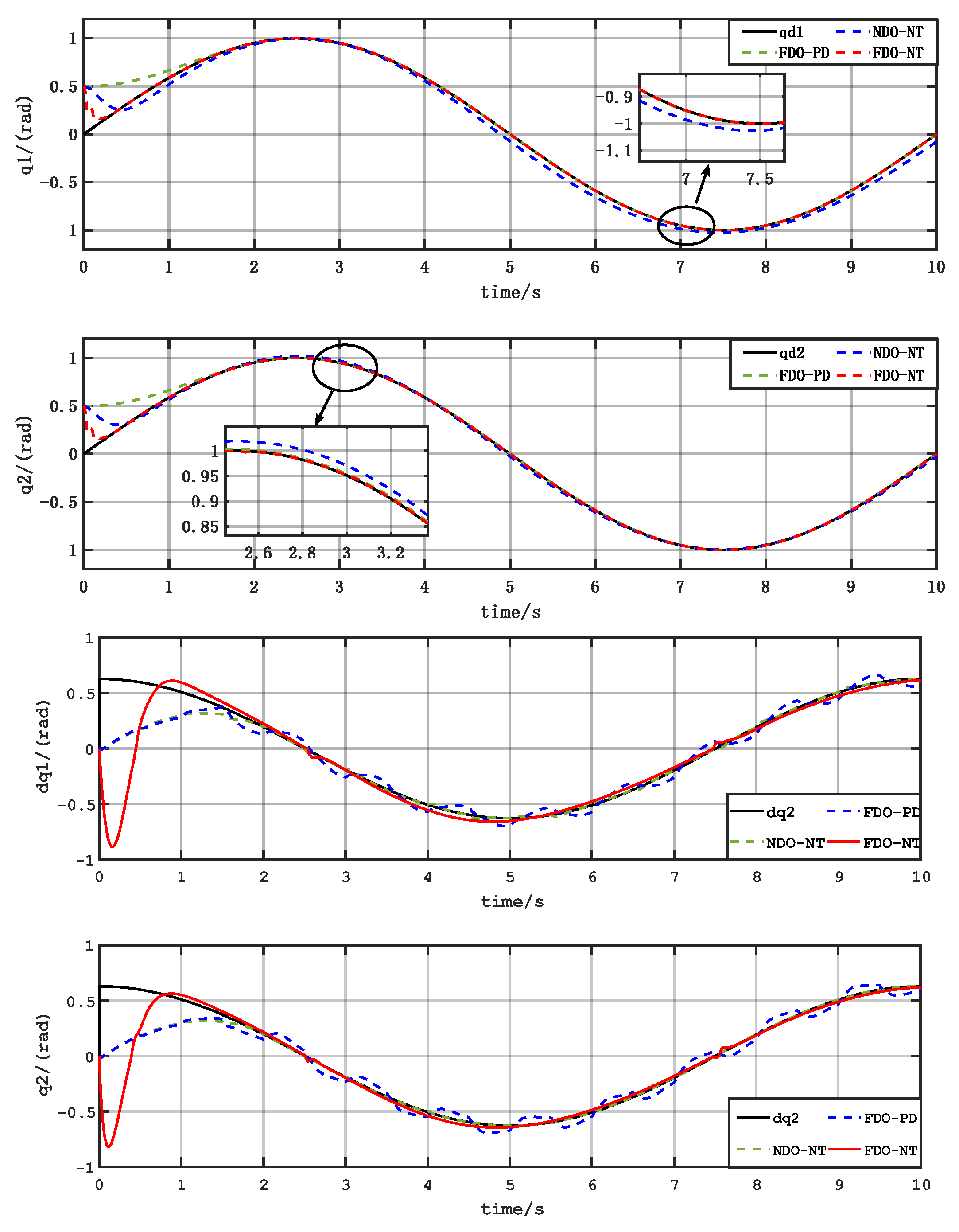
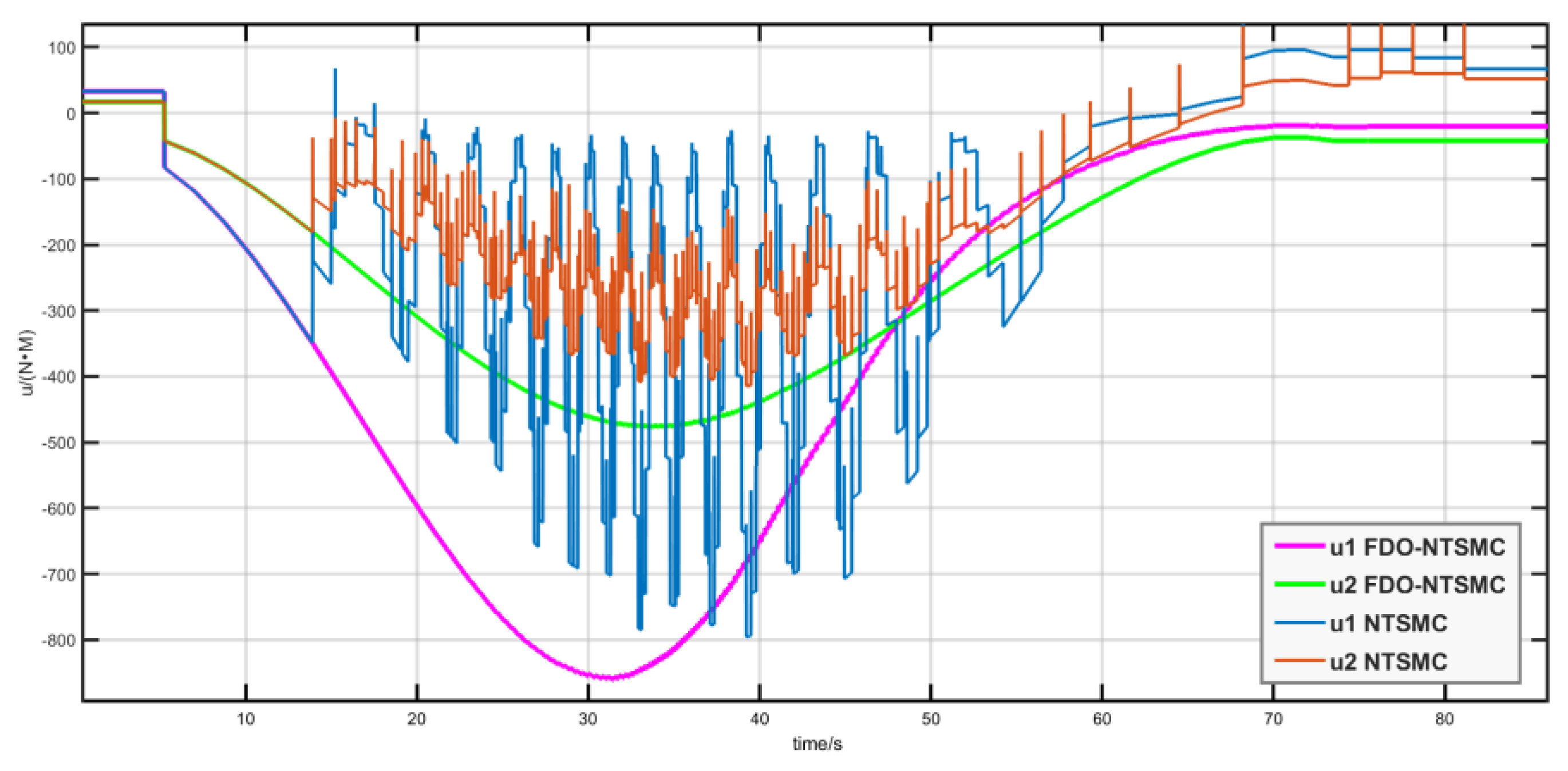
6. Simulation Analysis
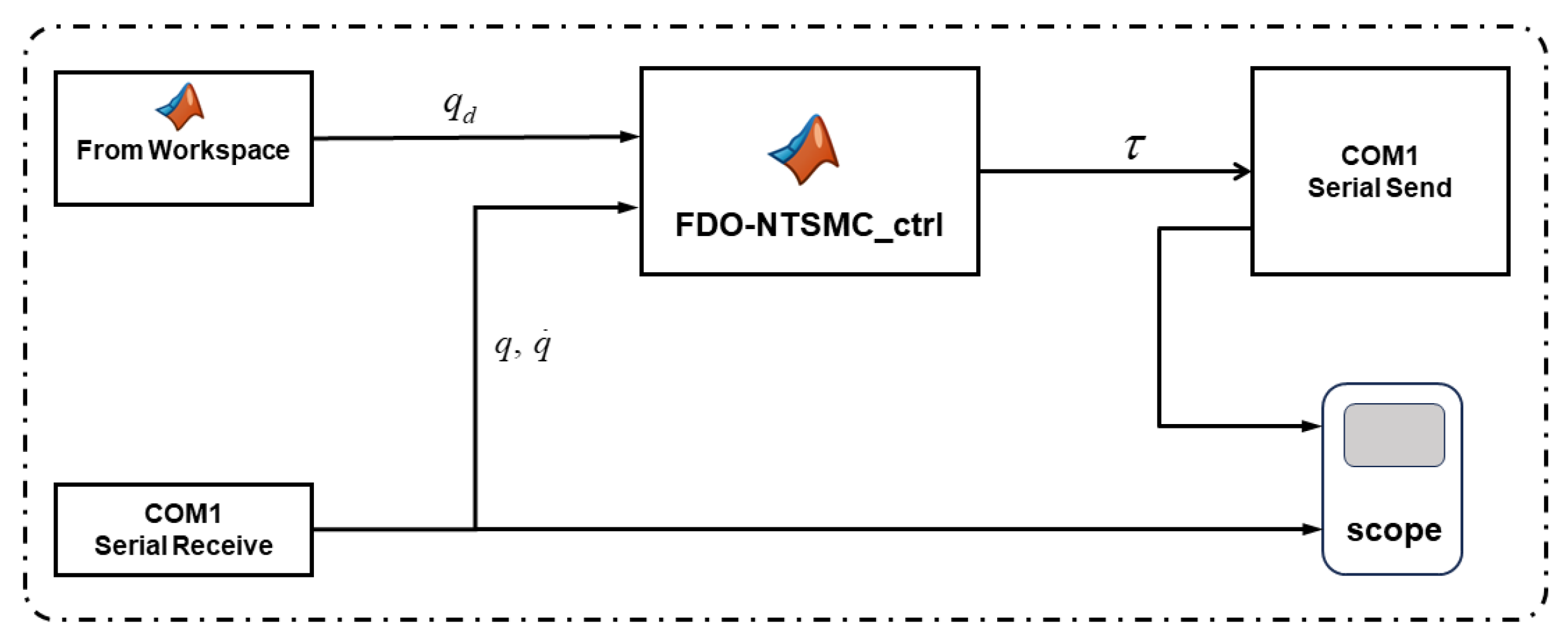
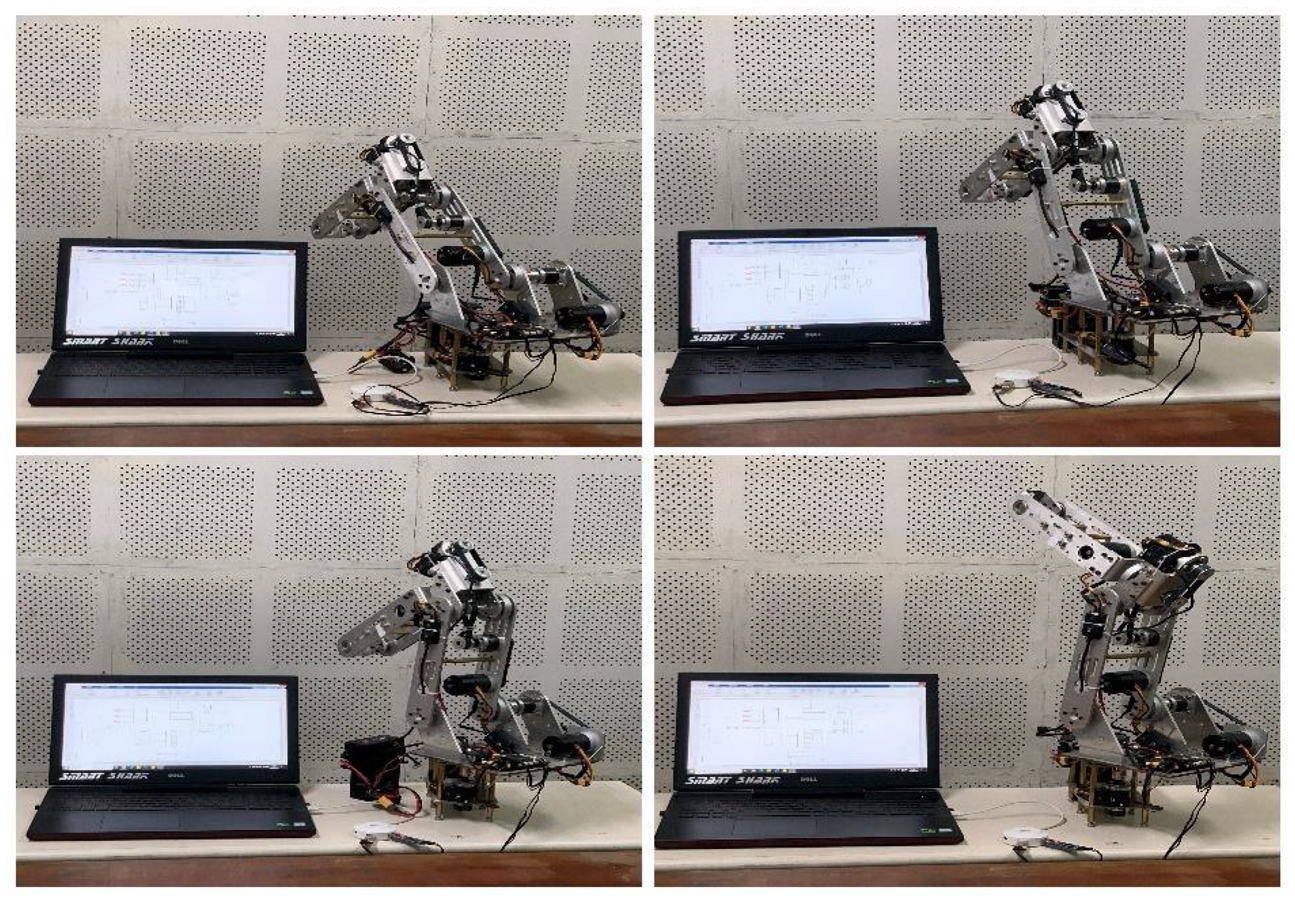
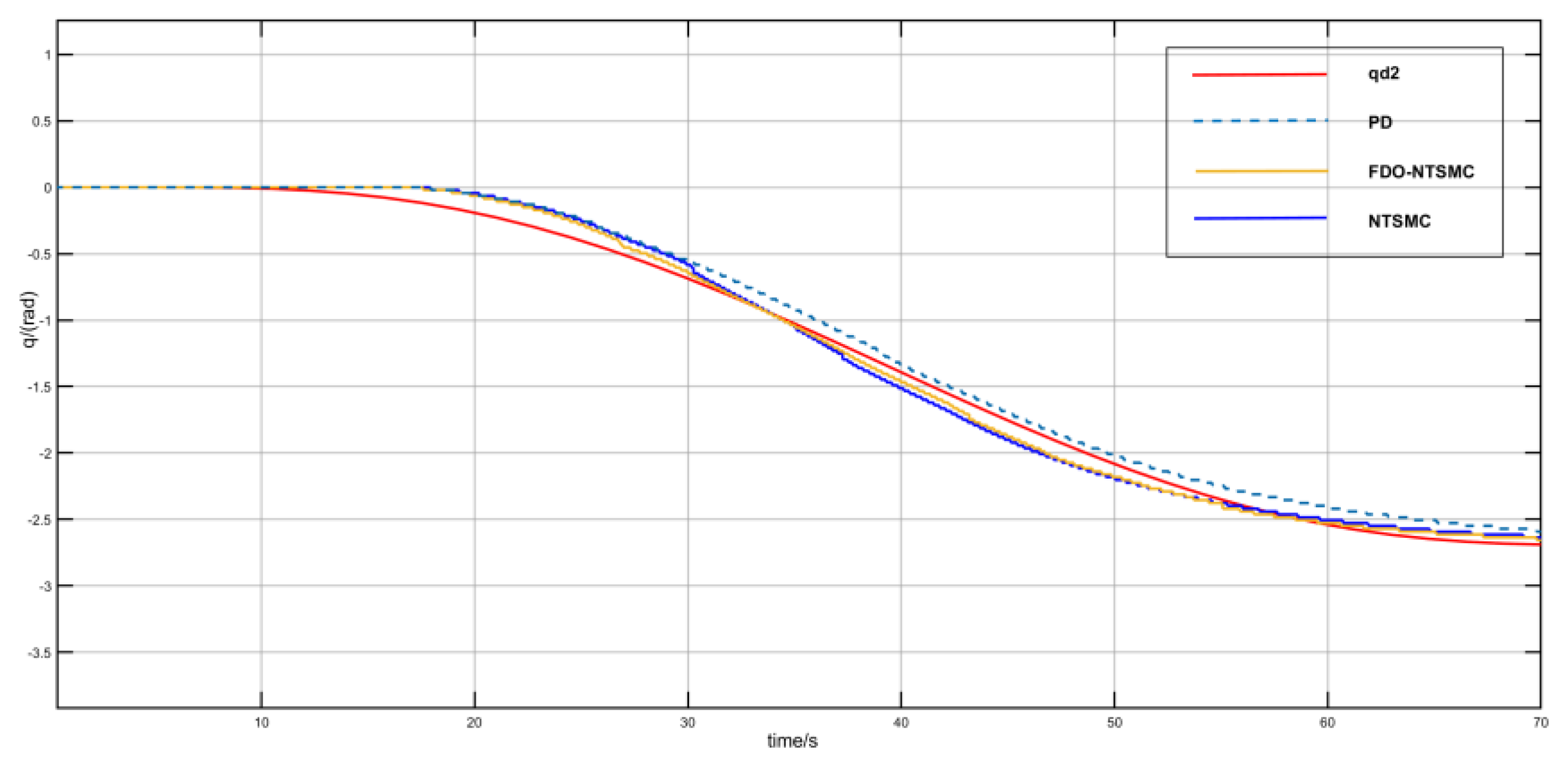
7. Experimental Analyses
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ayala, H.V.H.; dos Santos Coelho, L. Tuning of PID controller based on a multiobjective genetic algorithm applied to a robotic manipulator. Expert Syst. Appl. 2012, 39, 8968–8974. [Google Scholar] [CrossRef]
- Jafarov, E.M.; Parlakçi, M.N.A.; Istefanopulos, Y. A new variable structure PID-controller design for robot manipulators. IEEE Trans. Control Syst. Technol. 2004, 13, 122–130. [Google Scholar] [CrossRef]
- Islam, S.; Liu, X.P. Robust sliding mode control for robot manipulators. IEEE Trans. Ind. Electron. 2010, 58, 2444–2453. [Google Scholar] [CrossRef]
- Baek, J.; Jin, M.; Han, S. A new adaptive sliding-mode control scheme for application to robot manipulators. IEEE Trans. Ind. Electron. 2016, 63, 3628–3637. [Google Scholar] [CrossRef]
- Zhihong, M.; Paplinski, A.P.; Wu, H.R. A robust MIMO terminal sliding mode control scheme for rigid robotic manipulators. IEEE Trans. Autom. Control 1994, 39, 2464–2469. [Google Scholar] [CrossRef]
- Yi, S.; Zhai, J. Adaptive second-order fast nonsingular terminal sliding mode control for robotic manipulators. ISA Trans. 2019, 90, 41–51. [Google Scholar] [CrossRef]
- Mei, K.; Ding, S.; Chen, X. Fuzzy non-singular terminal sliding mode controller design for nonlinear systems with input saturation. Int. J. Fuzzy Syst. 2020, 22, 2271–2283. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H.J. A novel fault-tolerant control method for robot manipulators based on non-singular fast terminal sliding mode control and disturbance observer. IEEE Access 2020, 8, 109388–109400. [Google Scholar] [CrossRef]
- Wang, Y.; Gu, L.; Xu, Y.; Cao, X. Practical tracking control of robot manipulators with continuous fractional-order nonsingular terminal sliding mode. IEEE Trans. Ind. Electron. 2016, 63, 6194–6204. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Z.; Chen, C.L.P. Disturbance observer-based fuzzy control of uncertain MIMO mechanical systems with input nonlinearities and its application to robotic exoskeleton. IEEE Trans. Cybern. 2016, 47, 984–994. [Google Scholar] [CrossRef]
- He, W.; Li, H.; Wang, Y.; Liu, S. Suppression the disturbance of robotic manipulators based on nonlinear disturbance observer and fuzzy logic system. J. Adv. Comput. Intell. Intell. Inform. 2020, 24, 846–854. [Google Scholar] [CrossRef]
- Homayounzade, M.; Khademhosseini, A. Disturbance observer-based trajectory following control of robot manipulators. Int. J. Control Autom. Syst. 2019, 17, 203–211. [Google Scholar] [CrossRef]
- Van, M.; Mavrovouniotis, M.; Ge, S.S. An adaptive backstepping nonsingular fast terminal sliding mode control for robust fault tolerant control of robot manipulators. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 1448–1458. [Google Scholar] [CrossRef]
- Li, Z.; Su, C.Y.; Wang, L.; Chen, Z.; Chai, T. Nonlinear disturbance observer-based control design for a robotic exoskeleton incorporating fuzzy approximation. IEEE Trans. Ind. Electron. 2015, 62, 5763–5775. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, D.; Shen, G.; Sun, Z.; Xia, Y. Disturbance observer based adaptive fuzzy sliding mode control: A dynamic sliding surface approach. Automatica 2021, 129, 109606. [Google Scholar] [CrossRef]
- Van, M.; Ge, S.S. Adaptive fuzzy integral sliding-mode control for robust fault-tolerant control of robot manipulators with disturbance observer. IEEE Trans. Fuzzy Syst. 2020, 29, 1284–1296. [Google Scholar] [CrossRef]
- Kang, H.S.; Hyun, C.H.; Kim, S. Robust tracking control using fuzzy disturbance observer for wheeled mobile robots with skidding and slipping. Int. J. Adv. Robot. Syst. 2014, 11, 75. [Google Scholar] [CrossRef]
- Ren, Y.; Sun, Y.; Liu, L. Fuzzy disturbance observers-based adaptive fault-tolerant control for an uncertain constrained automatic flexible robotic manipulator. IEEE Trans. Fuzzy Syst. 2023, 32, 1144–1158. [Google Scholar] [CrossRef]
- Lin, C.K. Nonsingular terminal sliding mode control of robot manipulators using fuzzy wavelet networks. IEEE Trans. Fuzzy Syst. 2006, 14, 849–859. [Google Scholar] [CrossRef]
- Nojavanzadeh, D.; Badamchizadeh, M. Adaptive fractional-order non-singular fast terminal sliding mode control for robot manipulators. IET Control Theory Appl. 2016, 10, 1565–1572. [Google Scholar] [CrossRef]
- Zaare, S.; Soltanpour, M.R. Adaptive fuzzy global coupled nonsingular fast terminal sliding mode control of n-rigid-link elastic-joint robot manipulators in presence of uncertainties. Mech. Syst. Signal Process. 2022, 163, 108165. [Google Scholar] [CrossRef]
- Li, T.H.S.; Huang, Y.C. MIMO adaptive fuzzy terminal sliding-mode controller for robotic manipulators. Inf. Sci. 2010, 180, 4641–4660. [Google Scholar] [CrossRef]
- Jiang, B.; Karimi, H.R.; Yang, S.; Gao, C.; Kao, Y. Observer-based adaptive sliding mode control for nonlinear stochastic Markov jump systems via T–S fuzzy modeling: Applications to robot arm model. IEEE Trans. Ind. Electron. 2020, 68, 466–477. [Google Scholar] [CrossRef]
- Yin, X.; Pan, L.; Cai, S. Robust adaptive fuzzy sliding mode trajectory tracking control for serial robotic manipulators. Robot. Comput. Integr. Manuf. 2021, 72, 101884. [Google Scholar] [CrossRef]
- Goléa, N.; Goléa, A.; Barra, K.; Bouktir, T. Observer-based adaptive control of robot manipulators: Fuzzy systems approach. Appl. Soft Comput. 2008, 8, 778–787. [Google Scholar] [CrossRef]
- Truong, H.V.; Tran, D.T.; To, X.D.; Ahn, K.K.; Jin, M. Adaptive fuzzy backstepping sliding mode control for a 3-DOF hydraulic manipulator with nonlinear disturbance observer for large payload variation. Appl. Sci. 2019, 9, 3290. [Google Scholar] [CrossRef]
- Wei, W.; Xia, S.; Pang, J.; Chen, Y. Fuzzy Disturbance Observer-based Adaptive Backstepping Sliding Mode Control of Manipulators. In Proceedings of the 2019 IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Suzhou, China, 29 July–2 August 2019; pp. 1224–1229. [Google Scholar]
- Kim, E. A fuzzy disturbance observer and its application to control. IEEE Trans. Fuzzy Syst. 2002, 10, 77–84. [Google Scholar]
- Hou, Q.; Ma, L.; Wang, H.; Ding, S. Fuzzy disturbance observer design for a class of nonlinear SISO systems. Int. J. Fuzzy Syst. 2022, 24, 147–158. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controllers | Joint 1 | Joint 2 |
|---|---|---|
| FDO-NTSMC | 0.000424 | 0.000424 |
| FDO-PD | 0.024595 | 0.015600 |
| NDO-NTSMC | 0.001614 | 0.001271 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, K.; Wei, C.; Shi, P. Fuzzy Disturbance Observer-Based Adaptive Nonsingular Terminal Sliding Mode Control for Multi-Joint Robotic Manipulators. Processes 2025, 13, 1667. https://doi.org/10.3390/pr13061667
Guo K, Wei C, Shi P. Fuzzy Disturbance Observer-Based Adaptive Nonsingular Terminal Sliding Mode Control for Multi-Joint Robotic Manipulators. Processes. 2025; 13(6):1667. https://doi.org/10.3390/pr13061667
Chicago/Turabian StyleGuo, Keyou, Caili Wei, and Peipeng Shi. 2025. "Fuzzy Disturbance Observer-Based Adaptive Nonsingular Terminal Sliding Mode Control for Multi-Joint Robotic Manipulators" Processes 13, no. 6: 1667. https://doi.org/10.3390/pr13061667
APA StyleGuo, K., Wei, C., & Shi, P. (2025). Fuzzy Disturbance Observer-Based Adaptive Nonsingular Terminal Sliding Mode Control for Multi-Joint Robotic Manipulators. Processes, 13(6), 1667. https://doi.org/10.3390/pr13061667