The literature has mostly used optimization-based controllers to enhance the transient response of the system. The authors of [
1] used a hybrid partial swarm-based PI controller to reduce the index of performance (μ) given by Equation (2):
where a, b, and c are constants and |∆fi|, |∆fj|, and |∆Pt| represent changes in the frequency of area “i”, changes in the frequency of area ii, and the power through the tie, respectively. The results showed a large improvement in the system damping by using the PI controller. The authors of [
2,
3] discussed the importance of renewable energy and LFC challenges. Renewable energy sources (RESs) like solar and wind are critical for creating sustainable power systems, but their unpredictable and variable nature poses significant challenges. These fluctuations can upset the balance between electricity supply and demand, causing frequency instability in the power grid. Load frequency control (LFC) plays a vital role in maintaining this balance by adjusting generator output to match changing loads, keeping the system frequency stable (typically at 50 Hz or 60 Hz). Traditional LFC methods, originally designed for consistent fossil fuel-based generation, struggle to cope with the rapid changes introduced by RESs. As renewable energy use increases, advanced LFC strategies become essential to avoid issues like blackouts or equipment damage. The authors also made an evolution of LFC models and advanced techniques. LFC models have evolved from simple single-area systems to complex multi-area and deregulated setups, where coordination between regions and contractual agreements adds further complexity [
2,
4]. To manage RES variability, modern techniques include optimization algorithms, artificial intelligence like machine learning for predictive control, and energy storage systems, including batteries and FACTS devices. These innovations allow the grid to respond swiftly to fluctuations, with storage systems absorbing excess energy when RES output is high and supplying it during low-output periods. In microgrids, which often depend heavily on RESs, fast and tailored LFC strategies are particularly important to ensure stability in these smaller, localized networks [
2,
5]. Finally, the authors of [
2] investigated future directions and research needs. The future of LFC in RES-integrated power systems hinges on improving grid resilience against disruptions, such as sudden drops in renewable output or cyberattacks. Research is needed to develop adaptive control methods that adjust dynamically to real-time conditions and to create scalable solutions for both large-scale grids and microgrids. As global adoption of RESs accelerates, ongoing innovation is critical to keep power systems stable and reliable during the shift to cleaner energy. These advancements will help ensure that the integration of renewable sources strengthens, rather than undermines, the performance of modern power grids. Different researchers studied the LFC with several controllers and optimizations methods. The authors of [
6] introduced a new strategy for load frequency control (LFC) in power systems that rely heavily on renewable energy sources, such as wind and solar power. Renewable energy can make maintaining a stable frequency challenging because its output fluctuates. To address this, the authors propose using an advanced PI
λ(1 + PDF) controller, a type of control system fine-tuned with the Zebra Optimization Algorithm (ZOA) to keep the frequency steady. They also combine this controller with a hybrid energy storage system, which includes a Vanadium Redox Flow Battery (VRFB) and superconducting magnetic energy storage (SMES), to smooth out power variations. Additionally, an IPFC-FACTS device (Interline Power Flow Controller—Flexible AC Transmission System) is used to improve power flow management across the system. The approach was tested on a four-area power system, where it successfully reduced frequency deviations and enhanced stability under different operating conditions. The authors of [
7] introduce a method for automatic generation control (AGC) in a three-area interconnected power system, utilizing fuzzy logic controllers (FLCs) and superconducting magnetic energy storage (SMES) units. The system comprises two steam turbines and one hydro turbine, facing frequency deviations and tie-line power fluctuations due to unpredictable load changes. The proposed fuzzy PI-type controller outperforms traditional PI controllers by reducing settling time and overshoot, while SMES units enhance stability by rapidly managing energy during load disturbances. Simulations conducted using MATLAB R2021a demonstrate that integrating FLCs with SMES units significantly improves the system’s dynamic performance compared to conventional approaches. Other researchers explored load frequency control (LFC) in a two-area interconnected power system using a fuzzy gain scheduling PI (FGPI) controller. It aims to maintain stable frequency and tie-line power flow despite load disturbances. The proposed FGPI controller adjusts proportional and integral gains dynamically using seven fuzzy rules, outperforming conventional PI controllers and other fuzzy methods like those by Chang and Akalın. Simulations show it achieves shorter settling times and comparable overshoots, offering a simple, effective solution for reliable power system performance without requiring detailed system parameter knowledge [
8]. The authors of [
9] proposed an optimized control system for photovoltaic (PV) systems under partial shading (PS) conditions using the emperor penguin optimizer (EPO) algorithm. The EPO optimizes the initial duty cycle of the boost converter and tunes the gains of the PI controller and second-order amplifier (SOA) to maximize power extraction from PV arrays. The system’s performance is compared with the cuttlefish algorithm (CFA) and particle swarm optimization (PSO) across various PS scenarios. Results from MATLAB/SIMULINK simulations show that EPO enhances power harvesting, reduces oscillations, and ensures robustness under dynamic irradiance changes, outperforming CFA and offering a simpler alternative to PSO. The authors of [
10] investigated load frequency control (LFC) in single- and two-area power systems using PI, PID, fuzzy logic (FLC), and fuzzy-tuned PI (FTPI) controllers. This addresses frequency deviations caused by varying load demands. Simulations show that the conventional PI controller effectively minimizes frequency deviation, while the FTPI controller excels in reducing settling time. By dynamically adjusting PI gains with fuzzy logic based on error signals, the FTPI achieves a balanced response with minimal frequency deviation and faster stabilization compared to other controllers. The authors of [
11] proposed a Bacteria Foraging Optimization Algorithm (BFOA) to tune PI controllers for load frequency control (LFC) in a two-area interconnected power system. The BFOA optimizes controller parameters to minimize frequency deviations and tie-line power oscillations, using an integral of time multiplied by absolute error (ITAE) objective function. Simulation results demonstrate that the BFOA-tuned PI controller outperforms conventional PI controllers and genetic algorithm (GA)-tuned controllers, offering superior damping, reduced settling time, and robustness across various operating conditions and parameter variations. The authors of [
12] explored the use of an Artificial Neural Network (ANN) controller for automatic generation control (AGC) in a four-area interconnected power system, comprising three steam turbine areas with reheat effects and one hydro turbine area with generation rate constraints. The ANN, utilizing a back propagation-through-time algorithm, controls all areas simultaneously to manage frequency and tie-line power deviations caused by load perturbations. Simulation results show that the ANN controller outperforms conventional integral controllers, achieving faster settling times and better dynamic response under various load conditions. The authors of [
13] presented a robust PID controller optimized using the Imperialist Competitive Algorithm (ICA) for load frequency control (LFC) in a three-area power system. The controller addresses load disturbances—small, rapid load changes—using a first-order low-pass filter to enhance stability. The ICA tunes the PID parameters to minimize frequency deviations and tie-line power oscillations across a wide range of load changes, considering turbine nonlinearities. MATLAB/SIMULINK simulations of a three-area system show that the proposed PID controller outperforms genetic algorithm (GA)- and Neural Network-optimized PI controllers, offering faster response, reduced overshoot, and improved dynamic performance. The authors of [
14] investigated automatic generation control (AGC) in interconnected thermal systems with two equal areas, three unequal areas, and five unequal areas, each equipped with single reheat turbines and generation rate constraints of 3% per minute. It introduces a novel Integral–Double Derivative (IDD) controller and compares its performance with classical controllers (I, PI, ID, PID). Controller gains for the two-area system are optimized classically, while the Bacterial Foraging (BF) technique is used to simultaneously optimize gains and governor speed regulation parameters in the multi-area systems. Results show that the IDD controller outperforms others, offering superior dynamic response. Sensitivity analysis confirms its robustness to changes in loading, system parameters, and step-load perturbations. Other researchers introduced a novel robust PID controller for automatic generation control (AGC) in hydro turbine power systems. Utilizing the Nichols chart, the controller ensures the open-loop frequency response aligns with a specified ellipse, enhancing overshoot control, stability, and system dynamics. Tested on a multimachine hydro-power system, the proposed PID controller outperforms conventional PI controllers and another PID design using the QFT method, demonstrating improved damping and robustness across a wide range of operating conditions. By eliminating the transient droop compensator, it achieves faster dynamic responses. Other controllers with PSO, harmony search, the cuttlefish algorithm, emperor penguin optimizers, and fuzzy logic are presented in [
15,
16,
17] and proved their superiority through their low settling time and overshoot. The authors of [
18] improved the two-area system by using the fuzzy gain controller. The authors of [
19] used an integral derivative differential evaluation-based technique and proved its validation through comparison with other optimization techniques. An adaptive PID weighted particle swarm-based technique is presented in [
20], proving its superiority over GA and PSO optimizations. The nonlinearity in the governor is taken into consideration in [
21] by using the differential evolution technique. The Laurent series expands the controller transfer function in [
22]. The two-area system is improved by using the firefly technique in [
23]. The authors of [
24,
25] used gravitational search and differential evaluation techniques. Three areas of fuzzy PID-PSO-based techniques are presented in [
26]. At the same time, Kharitonov’s theorem and the locus of stability boundary dampen the oscillation in the LFC system [
27]. Combined thermal and PV generators are presented in [
28]. Conventional PID is presented in [
29]. The tilt integral derivative is presented in [
30], and its validation is proven through comparison with conventional controllers. A fractional controller based in flower pollination is used in [
31] to enhance the AGC system. Double derivative-based PID, cascaded PD, and a PID BAT technique-based controller with two degrees of freedom based on the Cuckoo search technique and PIDA-TLBO are presented in [
32,
33] to enhance the LFC performance under different disturbances. The authors of [
34] studied different schemes of LFC with integrated wind generators. The authors of [
35] proposed a detailed analysis of the LFC event triggered using the Lyapunov functional. This proved the reliability of the system by applying the proposed controller to the IEEE 39 bus system. Other authors have studied the LFC adaptive controller based on the scale of a microgrid [
36]. The authors of [
37] proposed a novel load frequency control (LFC) strategy for modern power systems by integrating Proportional–Integral–Derivative (PID) controllers with the Gray Wolf Optimizer (GWO) algorithm. Addressing the increasing complexity of multi-area power systems, including configurations with thermal, hydro, and wind energy sources, the study presents two simulation cases to evaluate system response to load disturbances and renewable variability. The results demonstrate that GWO-optimized PID controllers significantly enhance frequency stability, reduce oscillations, and achieve faster recovery times compared to traditional methods. The authors of [
38] introduced a novel low-delay dynamic event-triggered mechanism (DETM) and integrate it with a distributed model predictive control (DMPC) strategy to enhance load frequency control (LFC) in virtual power plants (VPPs) operating under a cloud-edge-terminal framework. By incorporating an adaptive adjustment variable and a dynamic variable into the DETM, the method effectively manages data packet transmissions, significantly reducing communication delays and network congestion. The proposed event-based DMPC framework allows edge-based controllers to independently process control actions, minimizing latency compared to traditional centralized approaches. Extensive case studies on a two-area power system demonstrate the proposed algorithm’s superiority in reducing average triggering rates, data processing time, and communication overhead, while maintaining robust control performance. The authors of [
39] explored the enhancement of load frequency control (LFC) in a two-area interconnected power system using superconducting magnetic energy storage (SMES). The system comprises diverse energy sources—hydroelectric and thermal (steam) power plants in area 1, and a gas power plant in area 2—modeled via state-space equations representing a fifteenth-order dynamic system. By integrating SMES, which leverages superconducting coils to store energy in a magnetic field with rapid charge–discharge capabilities, the study demonstrates significant improvements in frequency stability. MATLAB simulations reveal that SMES reduces frequency deviations, dampens power oscillations, and shortens recovery times following disturbances, such as sudden load changes, compared to a system without SMES. The authors of [
40] presented a novel Lyrebird Optimization Algorithm (LOA), inspired by the behavioral strategies of lyrebirds, to optimize the parameters of a Proportional–Integral–Derivative controller with a filter (PIDn) for enhanced load frequency control (LFC) in a two-area interconnected power system comprising non-reheat thermal stations. The study incorporates generation rate constraints (GRCs) and evaluates the LOA-PIDn approach through simulations across three disturbance scenarios, comparing its performance against established methods such as Ziegler–Nichols (ZN), the genetic algorithm (GA), the Bacteria Foraging Optimization Algorithm (BFOA), the Firefly Algorithm (FA), and others. The results highlight the LOA’s superiority, achieving a lower integral of time multiplied by absolute error (ITAE) and faster settling times for frequency deviations and tie-line power variances, thus improving system stability and reliability.
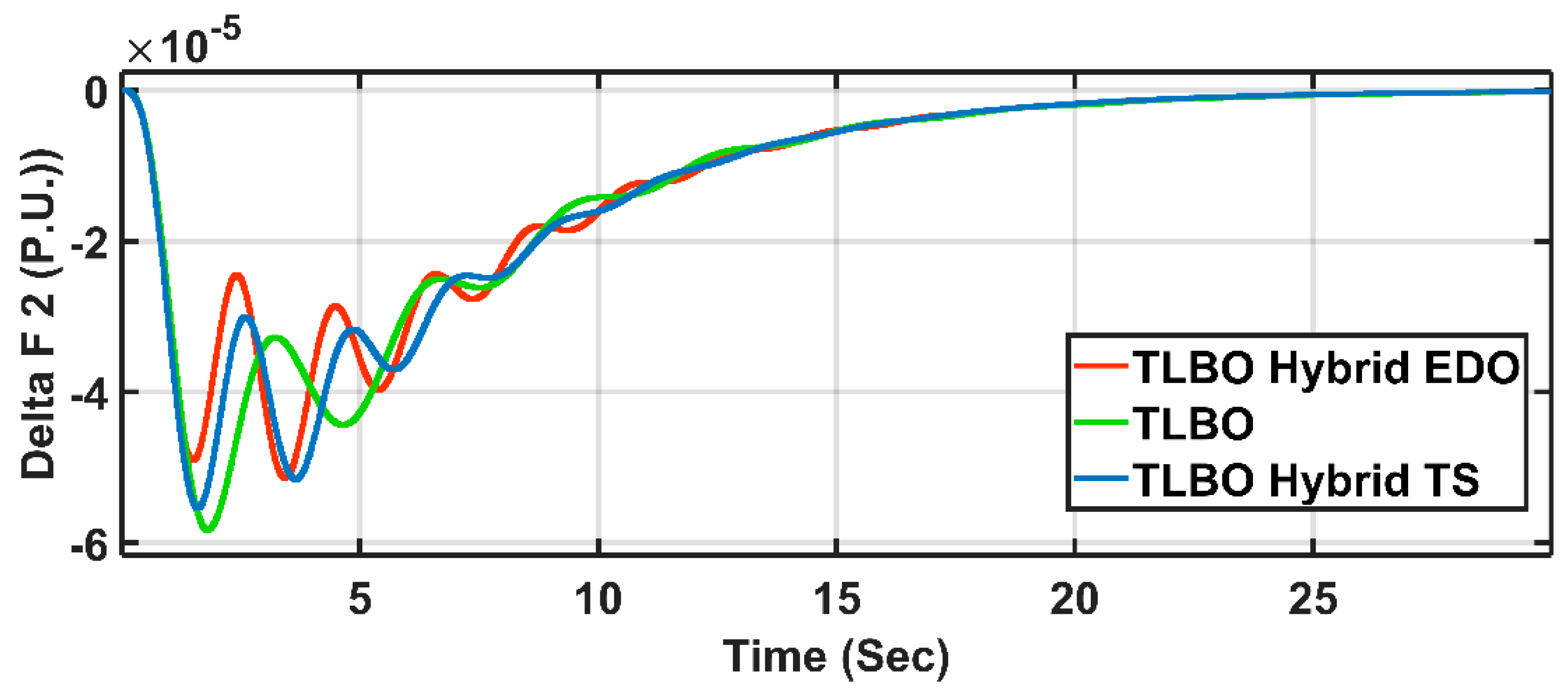
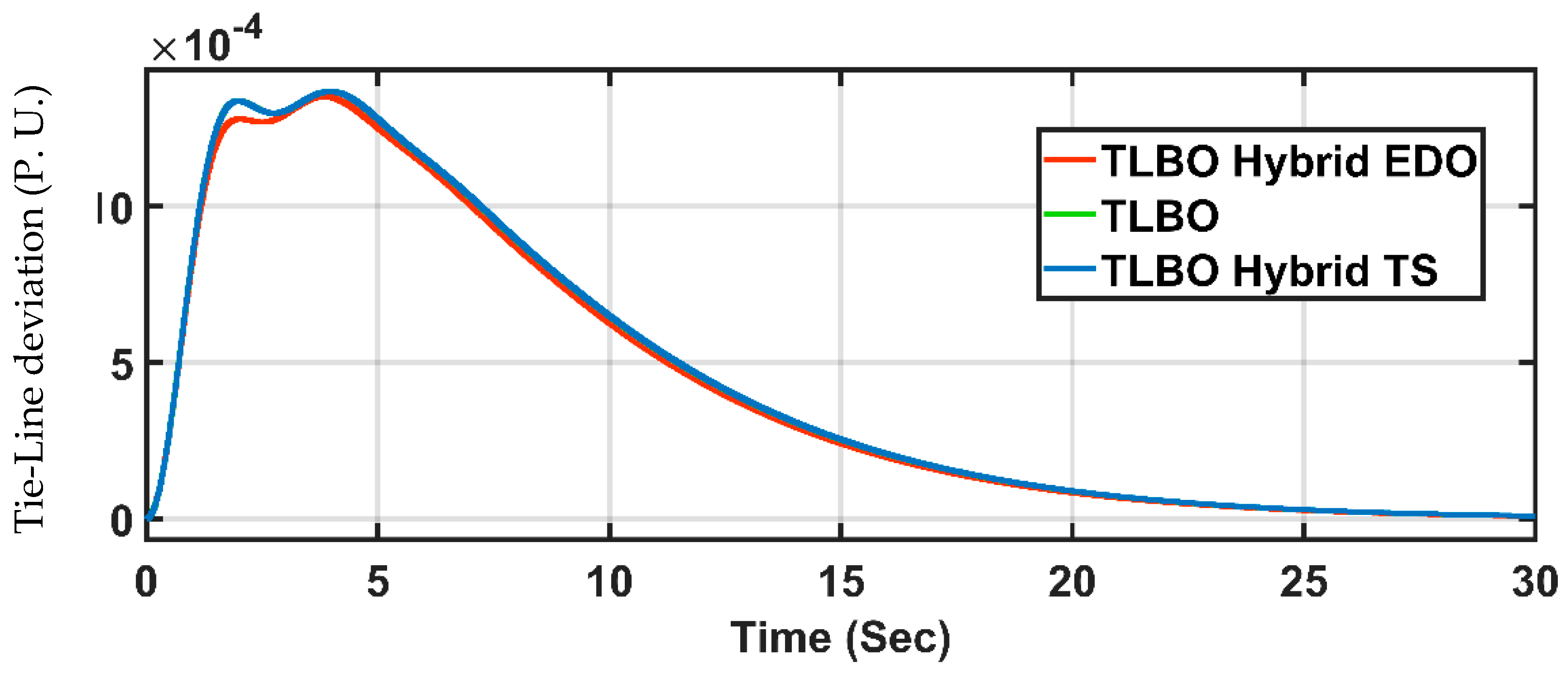
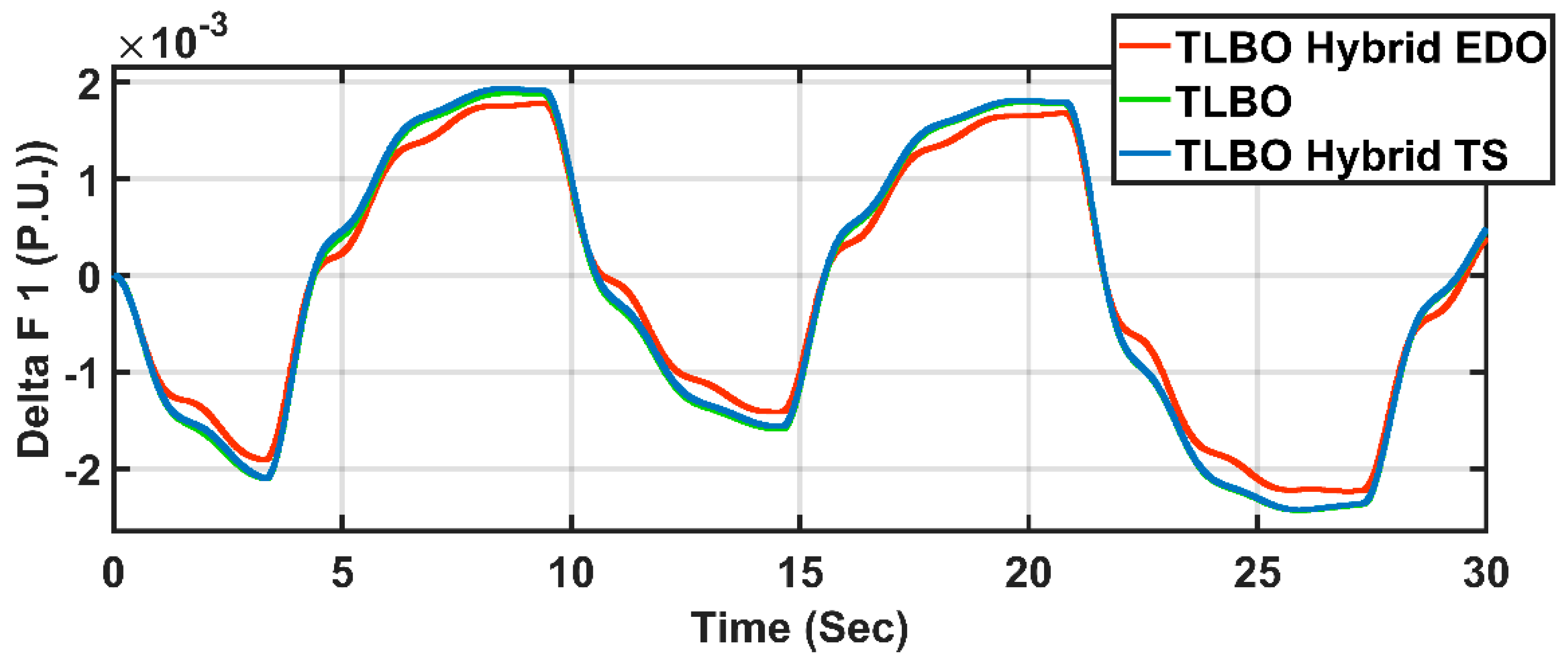
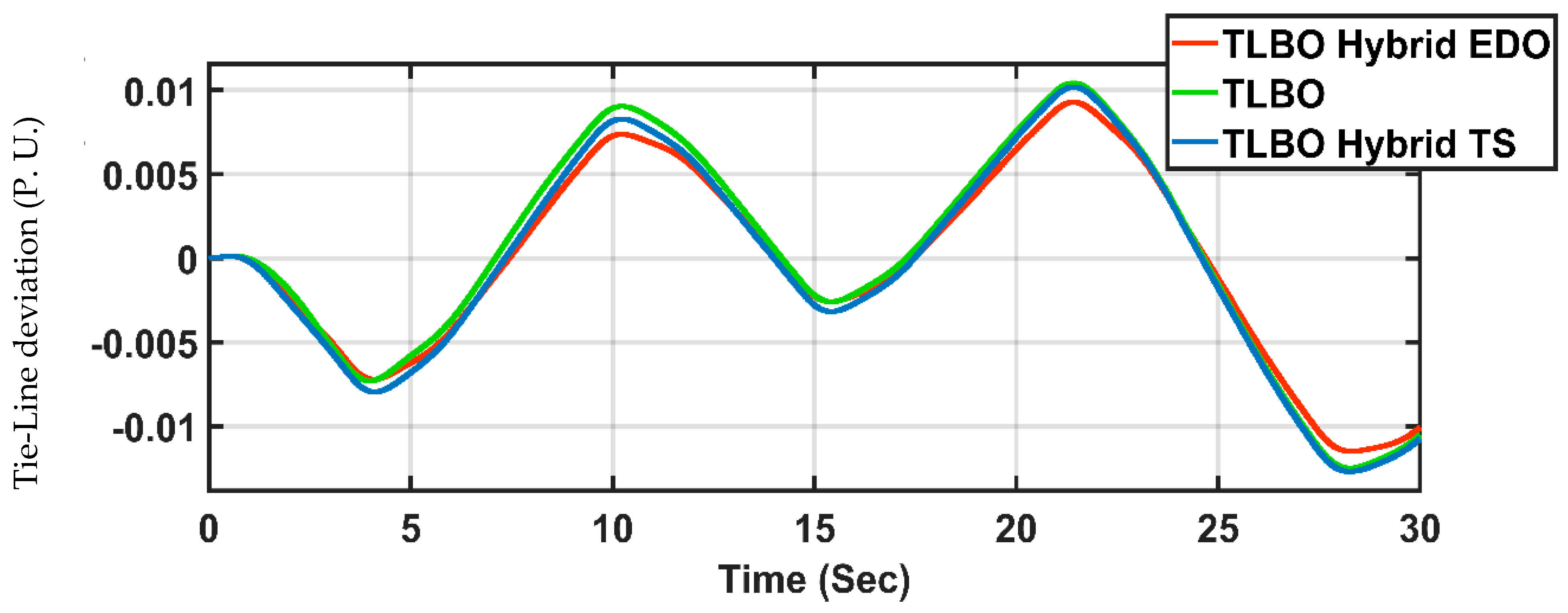
In this article, PIDA hybrid TLBO-TS-based and PIDA hybrid TLBO-EDO-based methods are presented in each area of the two LFC systems. Three cases are studied; the first is a disturbance in area 1. The second case is a disturbance in area 2. The third case is a disturbance of renewable energy through wave energy. In each case, the presented controller is compared to the PIDA-TLBO base presented in the literature. The main contribution of this paper lies in the integration of two optimization techniques, one characterized by strong exploration capabilities and the other by effective exploitation. This hybrid approach ensures convergence toward a near-global optimal solution and demonstrates superior performance compared to individual optimization methods reported in the literature. Additionally, the PIDA controller, enhanced by its acceleration term, outperforms the conventional controller in terms of overall system performance.






 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}