
A Position–Force Feedback Optimal Control Strategy for Improving the Passability and Wheel Grounding Performance of Active Suspension Vehicles in a Coordinated Manner


Abstract
1. Introduction
2. One-Sixth Vehicle Vibration Model
2.1. One-Sixth Vehicle Model Structure
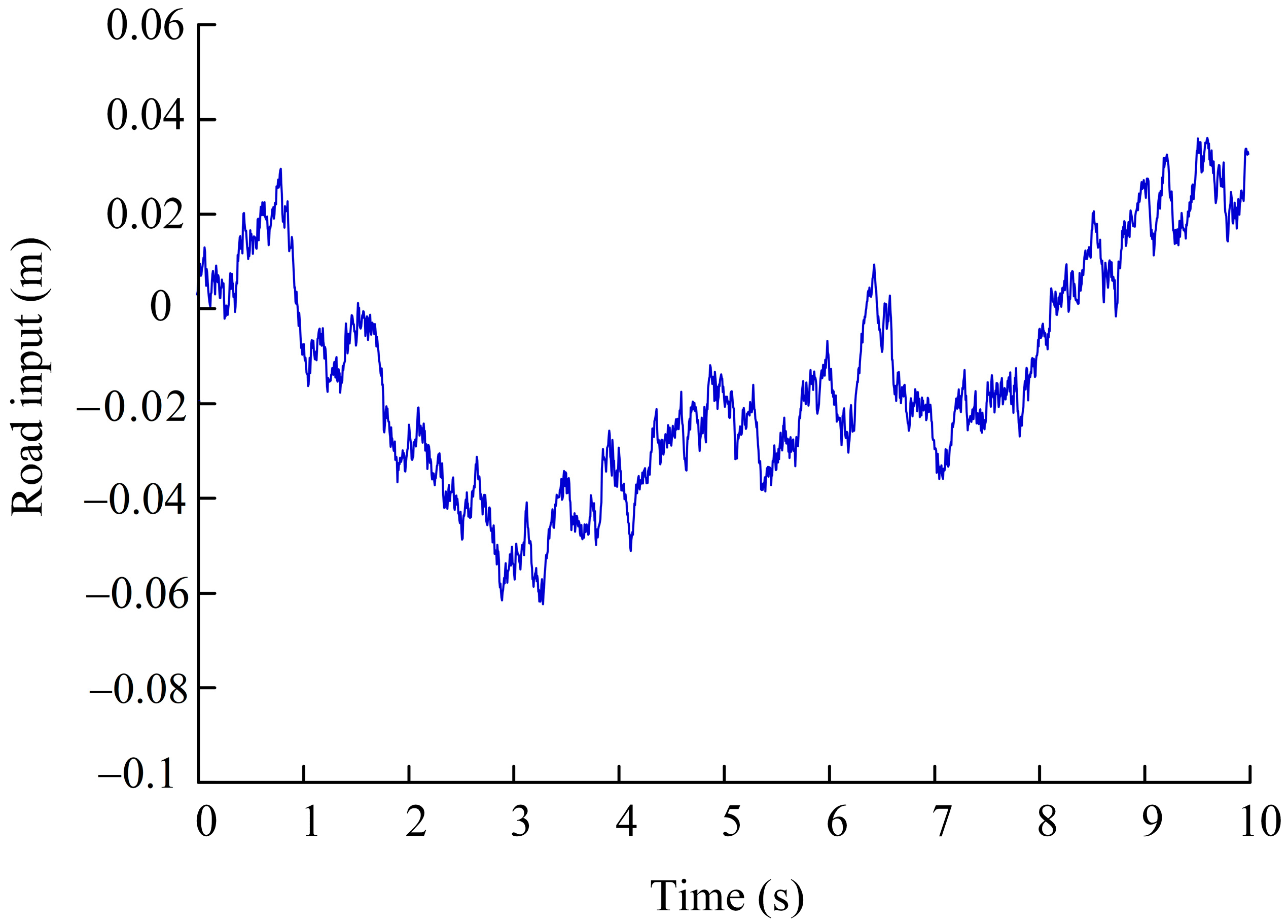
2.2. Road Excitation
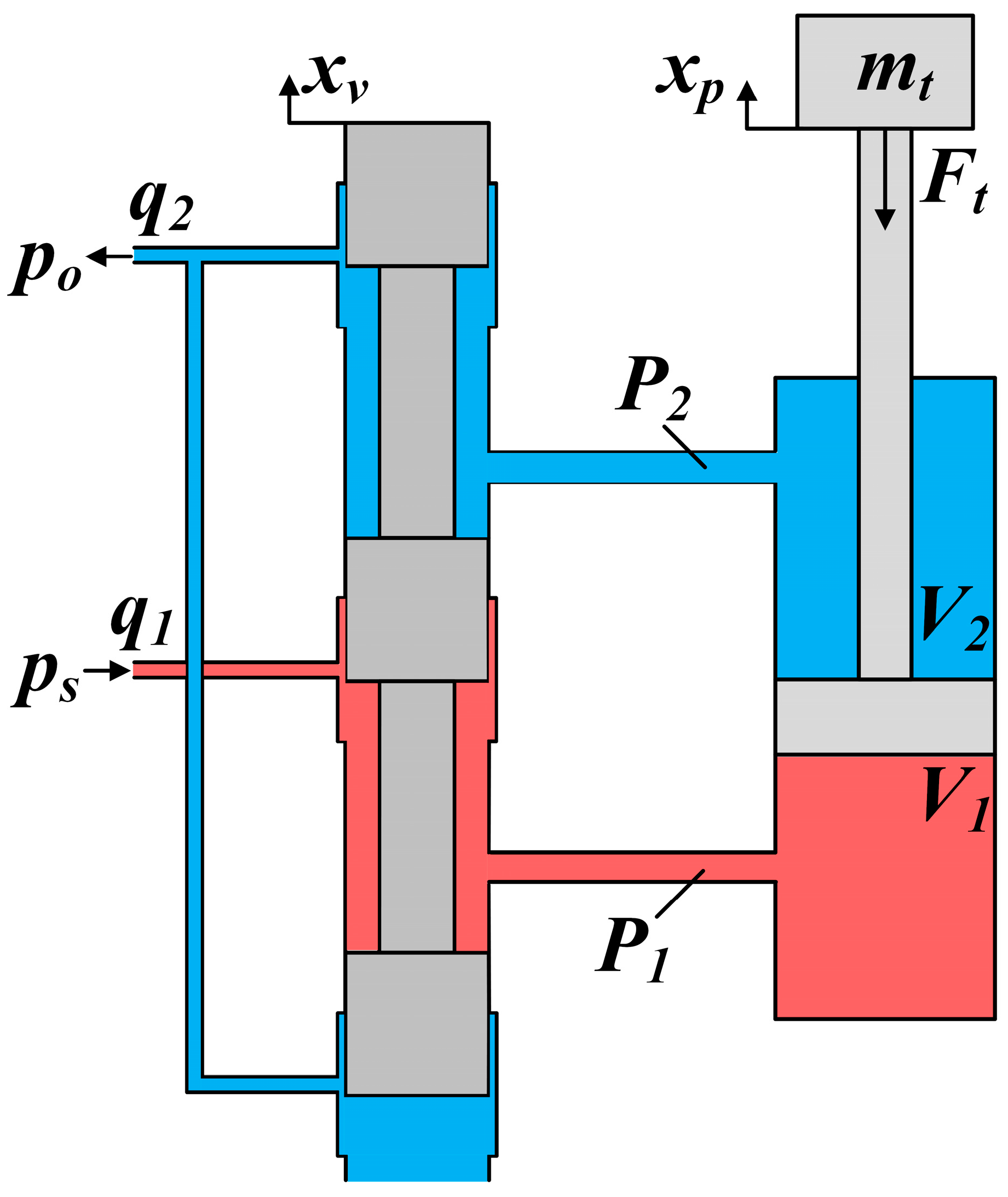
2.3. Modeling of Electro-Hydraulic Servo Actuator System
- It is assumed that the compressibility of the oil inside the servo valve is negligible.
- The oil supply pressure of the hydraulic system is constant, and the system oil return pressure is 0.
- The internal dynamic pressure loss of pipelines and valves is ignored.
- (1)
- The piston rod is extended.
- —System oil supply pressure (Pa);
- —System oil return pressure (Pa);
- —Servo valve port flow coefficient (m3/h);
- —Servo valve port area gradient (m);
- —System oil density (kg/m3).
- —The hydraulic cylinder has the oil pressure of the rod cavity (Pa);
- —Area ratio of the rod chamber to the rod-less chamber of the hydraulic cylinder ().
- —Effective volumetric oil elastic modulus (Pa);
- —Internal leakage coefficient of the hydraulic cylinder (Pa·m3/s);
- —External leakage coefficient of hydraulic cylinder (Pa·m3/s);
- , —Effective area of the rodless cavity and the roded cavity (m2);
- , —Initial volume of rodless cavity and roded cavity of hydraulic cylinder (m3).
- —Viscous damping coefficient of piston and load [N/(m/s)];
- —Equivalent external load force of the actuator (N).
- (2)
- The piston rod retracts
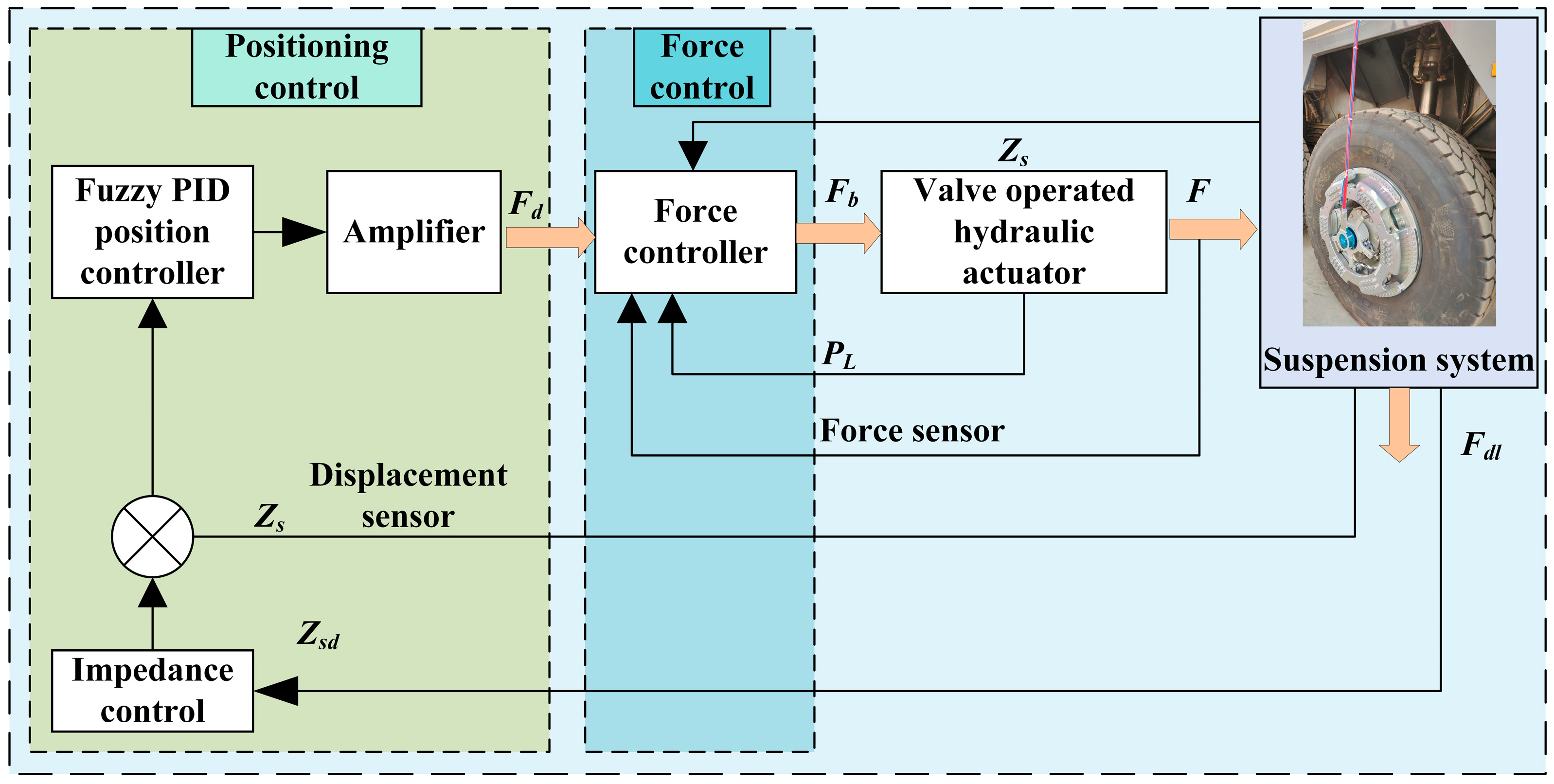
3. Optimal Control Based on Position and Force Feedback
3.1. Force Control
- (1)
- Linear feedback
- (2)
- LQG control law
- —Wheel dynamic load weighting coefficient;
- —Sprung mass acceleration weighting coefficient;
- —Unsprung mass acceleration weighting coefficient;
- —Active control force weighting coefficient.
3.2. Position Control
- (1)
- Impedance control
- —Expected displacement of the sprung mass;
- —Ideal target stiffness;
- —Ideal target damping.
- (2)
- Fuzzy PID position control
- (a)
- When the vertical speed of the vehicle is opposite to the acceleration symbol, it indicates that the system has a tendency to cancel each other, and the control amount should be appropriately reduced to avoid excessive regulation.
- (b)
- When the vertical velocity and acceleration symbols are the same, it indicates that the system state presents a trend of continuous increase or decrease, and the control quantity should be appropriately increased to suppress its divergence trend. Because the Centroid Method can effectively smooth the system output and improve the precision of the defuzzification result, it is used to process the fuzzy output. The mathematical expression of the Centroid Method is as follows:
- (1)
- When the vehicle is driving on random road surface and raised road surface, the speed is 36 km/h, and the road surface is ISO-C grade road surface generated by the filtered white noise method. In the future, testing will be conducted at various speeds under C-class road condition.
- (2)
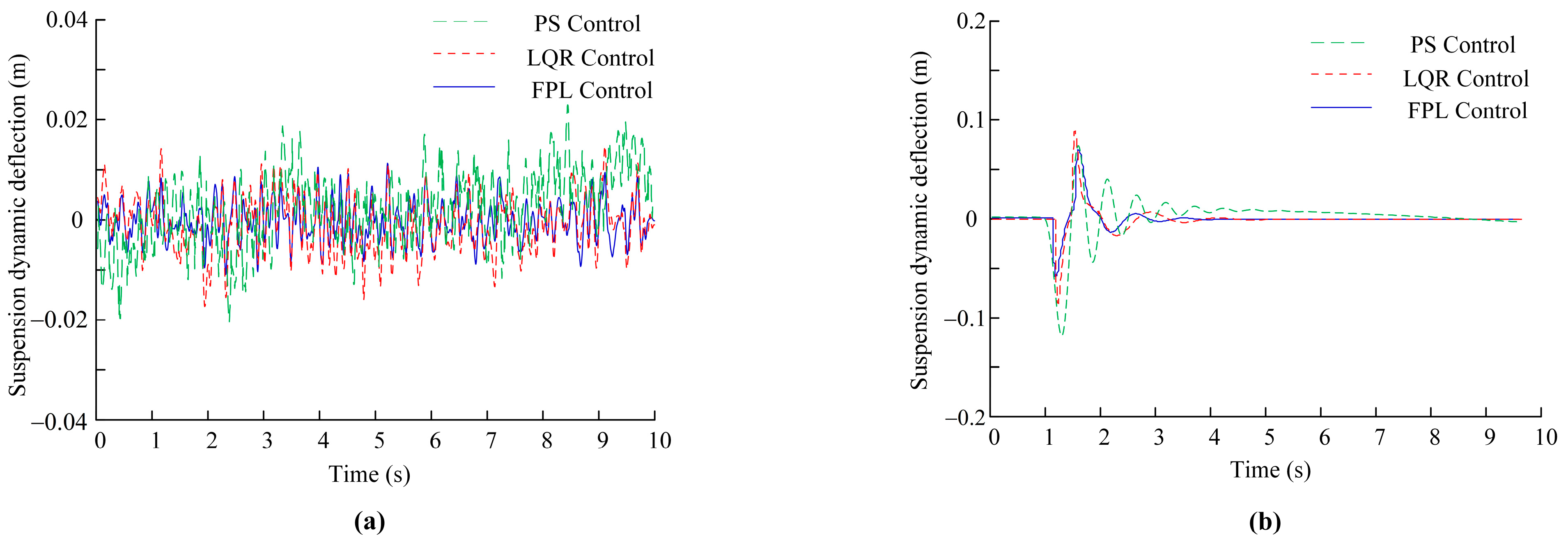
- The total travel constraint is set to ±110 mm. For the control strategy beyond the travel constraint, it is necessary to adjust the control parameters to keep them within the selected range.
- (3)
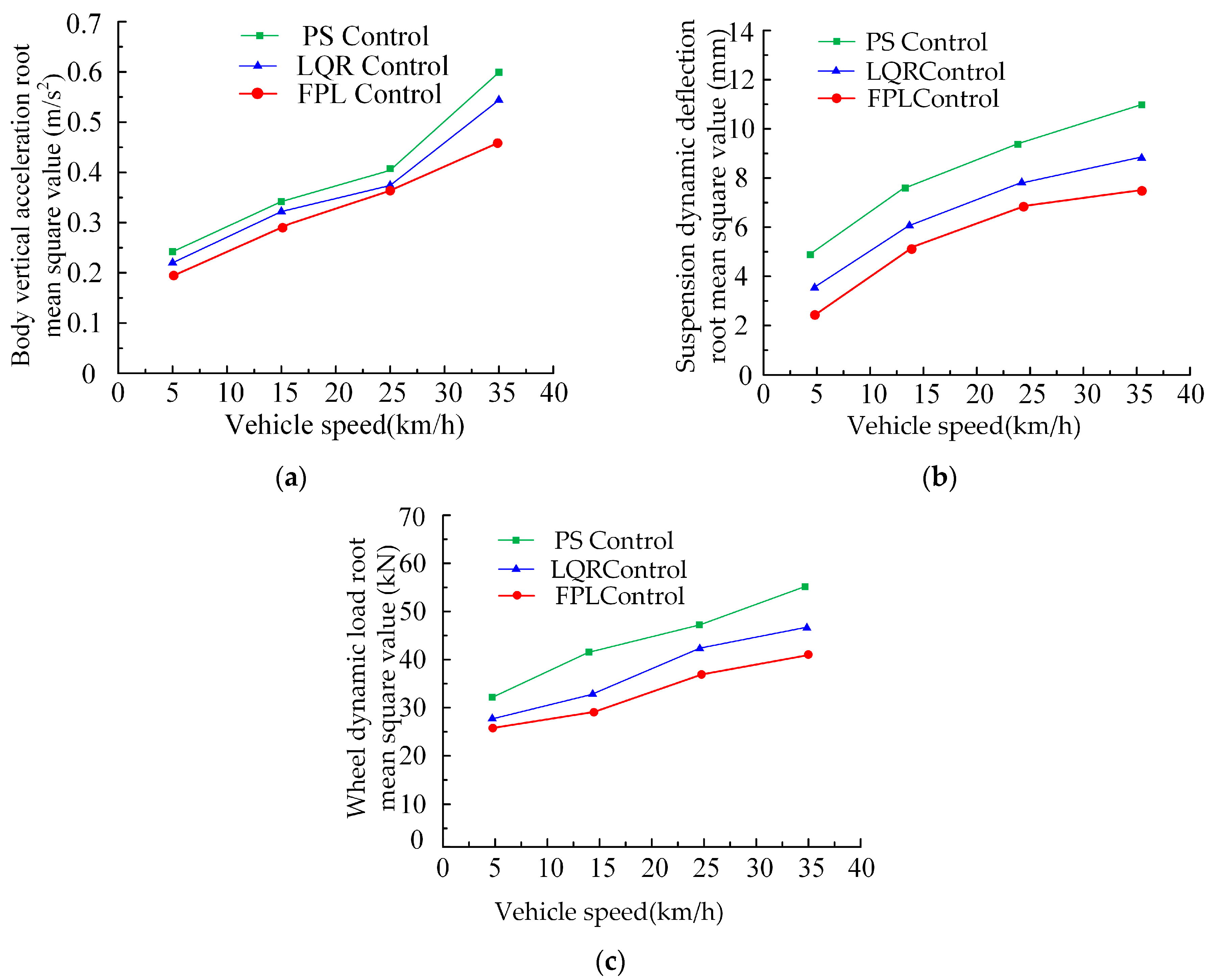
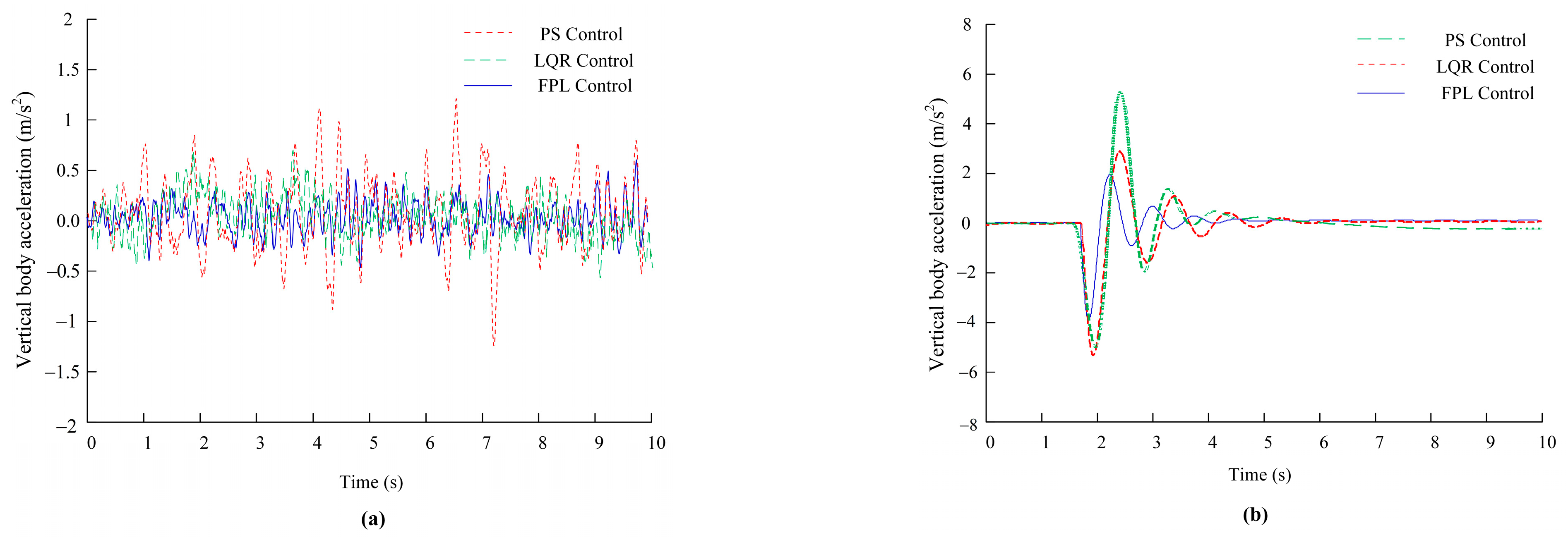
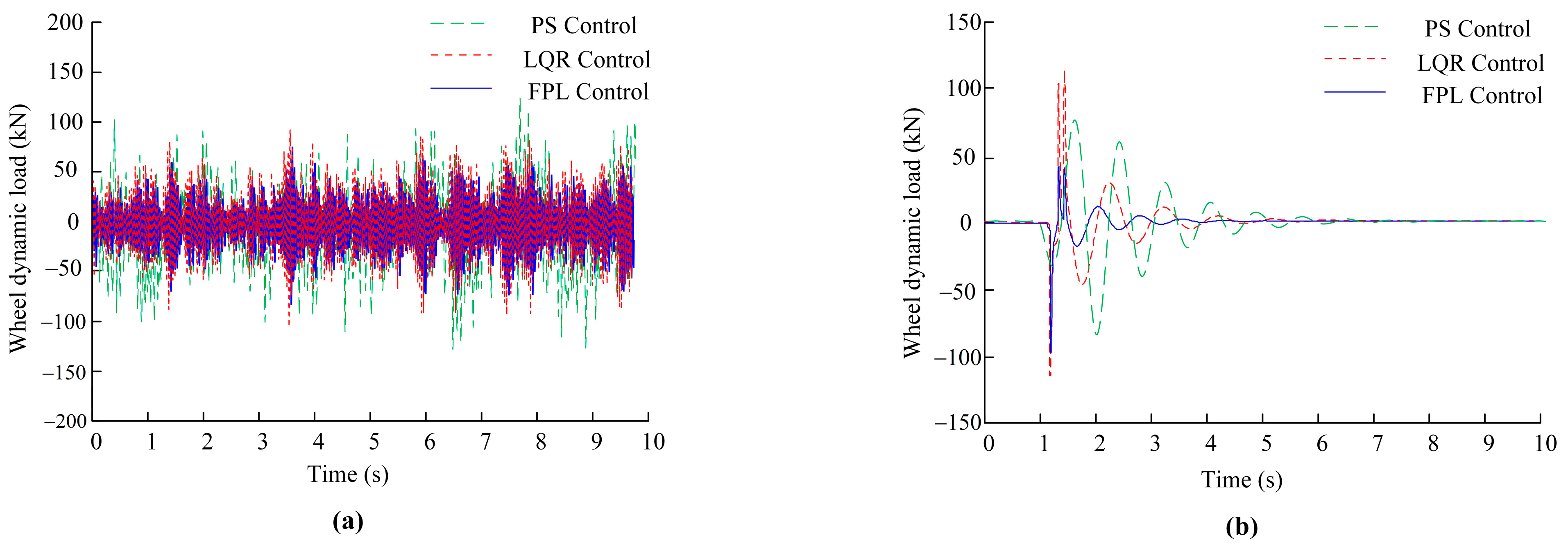
- The passive suspension (PS), constraint adaptive control (LQR), and fuzzy PID-LQG (FPL) integrated control designed in this paper are not affected by system delay, and their performance is consistent with 0 ms delay in all cases.
4. Simulation Analysis
5. Conclusions
- (1)
- Based on fully considering the nonlinear mechanical characteristics of the hydraulic actuator, a one-sixth vehicle structure model and a valve-controlled hydraulic actuator system model are constructed. A multi-closed-loop control strategy for position–force feedback optimal control of a valve-controlled hydraulic active suspension system is further proposed. A fuzzy PID position controller and a linear feedback-LQG optimal force controller are designed, and an impedance control is designed to track the dynamic load of the wheel to achieve accurate correction of the sprung mass position.
- (2)
- With the help of the theoretical analysis and simulation test of the control algorithm, the vehicle is subjected to the working condition test of the excitation input of C-class road surface and raised road surface at varying speeds and fixed speeds. The results strongly confirm that the active suspension with fuzzy PID position and linear feedback LQG optimal force control algorithm is better than the passive PS control and LQR adaptive control, achieving control optimization goals more efficiently. Under different road conditions and various speed incentives, the relevant performance indexes show a significant downward trend. The results show that the designed controller can reduce the vibration transmission of the vehicle during driving, reduce the impact on the suspension system, improve the grounding ability of the wheel, and improve the ride comfort and handling stability of the vehicle. The controller shows good road adaptability both on the C-class road surface and the raised road surface, which further verifies the effectiveness of the proposed control strategy in improving vehicle passability.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shah, D.; Santos, M.M.D.; Chaoui, H.; Justo, J.F. Event-Triggered Non-Switching Networked Sliding Mode Control for Active Suspension System With Random Actuation Network Delay. IEEE Trans. Intell. Transp. Syst. 2022, 23, 7521–7534. [Google Scholar] [CrossRef]
- Rath, J.J.; Defoort, M.; Sentouh, C.; Karimi, H.R.; Veluvolu, K.C. Output-Constrained Robust Sliding Mode Based Nonlinear Active Suspension Control. IEEE Trans. Ind. Electron. 2020, 67, 10652–10662. [Google Scholar] [CrossRef]
- Wang, J.J.; Zhao, J.Y.; Cai, W.; Li, W.L.; Jia, X.; Wei, P. Leveling Control of Vehicle Load-Bearing Platform Based on Multisensor Fusion. J. Sens. 2021, 2021, 7. [Google Scholar] [CrossRef]
- Chen, H.; Liu, Y.J.; Liu, L.; Tong, S.C.; Gao, Z.W. Anti-Saturation-Based Adaptive Sliding-Mode Control for Active Suspension Systems With Time-Varying Vertical Displacement and Speed Constraints. IEEE Trans. Cybern. 2022, 52, 6244–6254. [Google Scholar] [CrossRef]
- Liu, H.; Li, S.H.; Zhang, P.Q. Rigid flexible coupling speclal vehicle dynamic analysis and suspension optimization of obstracle crossing. J. Dyn. Control 2021, 19, 74–82. [Google Scholar]
- Zhang, X.D.; Göhlich, D.; Zheng, W. Karush-Kuhn-Tuckert based global optimization algorithm design for solving stability torque allocation of distributed drive electric vehicles. J. Frankl. Inst.-Eng. Appl. Math 2017, 354, 8134–8155. [Google Scholar] [CrossRef]
- Yang, T.; Sun, J.; Liu, Z.; Wang, J. Research on Suspension Systems Control for Heavy Duty Transport Vehicles under Extreme Operating Conditions Considering Handling Stability. J. Transp. Res. Board 2025, 03611981251315691. [Google Scholar] [CrossRef]
- Xiong, X.; Pan, Z.; Liu, Y.; Yue, J.; Xu, F. An adaptive backstepping sliding mode control strategy for the magnetorheological semi-active suspension. J. Automob. Eng. 2024, 09544070241260454. [Google Scholar] [CrossRef]
- Ji, G.; Li, S.; Feng, G.; Li, Z.; Shen, X. Time-delay compensation control and stability analysis of vehicle semi-active suspension systems. Mech. Syst. Signal Process. 2025, 228, 112414. [Google Scholar] [CrossRef]
- Xing, X.Y.; Burdet, E.; Si, W.Y.; Yang, C.G.; Li, Y.A. Impedance Learning for Human-Guided Robots in Contact With Unknown Environments. IEEE Trans. Robot. 2023, 39, 3705–3721. [Google Scholar] [CrossRef]
- Sharifi, M.; Azimi, V.; Mushahwar, V.K.; Tavakoli, M. Impedance Learning-Based Adaptive Control for Human-Robot Interaction. IEEE Trans. Control Syst. Technol. 2022, 30, 1345–1358. [Google Scholar] [CrossRef]
- An, H.; Ye, C.; Yin, Z.; Lin, W. Neural Adaptive Impedance Control for Force Tracking in Uncertain Environment. Electronics 2023, 12, 640. [Google Scholar] [CrossRef]
- Ulkir, O.; Akgun, G.; Kaplanoğlu, E.J.S.i.I. Real-Time Implementation of Data-Driven Predictive Controller for an Artificial Muscle. Stud. Inform. Control 2019, 28, 189–200. [Google Scholar] [CrossRef]
- Flayyih, M.A.; Hamzah, M.N.; Hassan, J.M. Nonstandard Backstepping Based Integral Sliding Mode Control of Hydraulically Actuated Active Suspension System. Int. J. Automot. Technol. 2023, 24, 1665–1673. [Google Scholar] [CrossRef]
- Nazemian, H.; Masih-Tehrani, M. Development of an optimized game controller for energy saving in a novel interconnected air suspension system. Proc. Inst. Mech. Eng. Part D-J. Automob. Eng. 2020, 234, 3068–3080. [Google Scholar] [CrossRef]
- Guo, S.J.; Chen, L.; Wang, X.K.; Zou, J.Y.; Hu, S.B. Hydraulic Integrated Interconnected Regenerative Suspension: Modeling and Characteristics Analysis. Micromachines 2021, 12, 22. [Google Scholar] [CrossRef]
- Ding, F.; Liu, J.; Jiang, C.; Du, H.P.; Zhou, J.X.; Lei, F. Vibration suppression investigation and parametric design of tri-axle straight heavy truck with pitch-resistant hydraulically interconnected suspension. J. Vib. Control 2022, 28, 3823–3840. [Google Scholar] [CrossRef]
- Fu, Y.M.; Zhou, X.J.; Wan, B.W.; Yang, X.F. Decoupled adaptive terminal sliding mode control strategy for a 6-DOF electro-hydraulic suspension test rig with RBF coupling force compensator. Proc. Inst. Mech. Eng. Part C-J. Eng. Mech. Eng. Sci. 2023, 237, 4339–4357. [Google Scholar] [CrossRef]
- Ozbek, C.; Ozguney, O.C.; Burkan, R.; Yagiz, N. Ride comfort improvement using robust multi-input multi-output fuzzy logic dynamic compensator. Proc. Inst. Mech. Eng. Part I-J. Syst. Control Eng. 2023, 237, 72–85. [Google Scholar] [CrossRef]
- Bashir, A.O.; Rui, X.T.; Abbas, L.K.; Zhang, J.S. Ride Comfort Enhancement of Semi-active Vehicle Suspension Based on SMC with PID Sliding Surface Parameters Tuning using PSO. Control Eng. Appl. Inform. 2019, 21, 51–62. [Google Scholar]
- Fu, B.; Liu, B.B.; Di Gialleonardo, E.; Bruni, S. Semi-active control of primary suspensions to improve ride quality in a high-speed railway vehicle. Veh. Syst. Dyn. 2023, 61, 2664–2688. [Google Scholar] [CrossRef]
- Saglam, F.; Unlusoy, Y.S. Adaptive ride comfort and attitude control of vehicles equipped with active hydro-pneumatic suspension. International J. Veh. Des. 2016, 71, 31–51. [Google Scholar] [CrossRef]
- Wang, Y.Y.; Li, P.F.; Ren, G.Z. Electric vehicles with in-wheel switched reluctance motors: Coupling effects between road excitation and the unbalanced radial force. J. Sound Vib. 2016, 372, 69–81. [Google Scholar] [CrossRef]
- Xu, Z.Q.; Li, W.L.; Liu, X.Y.; Chen, Z.X. Dynamic characteristics of coupling model of valve-controlled cylinder parallel accumulator. Mech. Ind. 2019, 20, 18. [Google Scholar] [CrossRef]
- Fateh, M.M.; Alavi, S.S. Impedance control of an active suspension system. Mechatronics 2009, 19, 134–140. [Google Scholar] [CrossRef]
- Wang, G.; Chadli, M.; Basin, M.V. Practical Terminal Sliding Mode Control of Nonlinear Uncertain Active Suspension Systems With Adaptive Disturbance Observer. IEEE-ASME Trans. Mechatron. 2021, 26, 789–797. [Google Scholar] [CrossRef]
- Zhao, W.P.; Gu, L. Hybrid Particle Swarm Optimization Genetic LQR Controller for Active Suspension. Appl. Sci. 2023, 13, 14. [Google Scholar] [CrossRef]
- Sathishkumar, P.; Jancirani, J.; John, D.; Arun, B. Controller Design for Convoluted Air spring system controlled Suspension. Appl. Mech. Mater. 2014, 592–594, 1025–1029. [Google Scholar] [CrossRef]
- Huang, Y.B.; Wu, X.; Na, J.; Gao, G.B.; Guo, Y. Active Suspension Control for Vehicle Systems with Prescribed Performance. J. Vib. Eng. Technol. 2017, 5, 407–416. [Google Scholar]
- Najafi, A.; Masih-Tehrani, M.; Emami, A.; Esfahanian, M. A modern multidimensional fuzzy sliding mode controller for a series active variable geometry suspension. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 23. [Google Scholar] [CrossRef]
- Lu, Y.; Zhen, R.; Liu, Y.; Zhong, J.; Sun, C.; Huang, Y.; Khajepour, A. Practical solution for attenuating industrial heavy vehicle vibration: A new gain-adaptive coordinated suspension control system. Control Eng. Pract. 2025, 154, 106125. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ∆kp | e | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | ||
| NB | PB | PB | PM | PM | PS | PS | ZE | |
| NM | PB | PM | PM | PM | PS | ZE | NS | |
| NS | PM | PM | PM | PS | ZE | NS | NS | |
| ec | ZE | PM | PS | PS | ZE | NS | NM | NM |
| PS | PS | PS | ZE | NS | NS | NM | NM | |
| PM | ZE | ZE | NS | NM | NM | NB | NB | |
| PB | ZE | NS | NS | NM | NM | NB | NB | |
| ∆ki | e | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | ||
| NB | NB | NB | NM | NS | ZE | ZE | NB | |
| NB | NB | NM | NS | NS | ZE | ZE | NB | |
| NM | NM | NS | NS | ZE | PS | PS | NM | |
| ec | NM | NS | NS | ZE | PS | PM | PM | NM |
| NS | NS | ZE | PS | PM | PM | PM | NS | |
| ZE | ZE | PS | PM | PM | PB | PB | ZE | |
| ZE | ZE | PS | PM | PM | PB | PB | ZE | |
| ∆kd | e | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | ||
| PS | PS | ZE | ZE | PS | PM | PB | PS | |
| NS | NS | NM | NS | ZE | NS | PM | NS | |
| NB | NM | NM | NS | ZE | PS | PM | NB | |
| ec | NB | NM | NM | NS | ZE | PS | PM | NB |
| NB | NM | NS | NS | ZE | PS | PS | NB | |
| NM | NS | NS | ZE | ZE | PS | PS | NM | |
| PS | ZE | ZE | PS | PM | PB | PB | PS | |
| Parameters | Value |
|---|---|
| /(kg) | 5580 |
| /(kg) | 460 |
| /(kN·m−1) | 5.8 × 106 |
| /(N·s·m−1) | 8.7 × 103 |
| /(kN·m−1) | 1.96 × 106 |
| /(N·s·m−1) | 7.0 × 103 |
| 0.7 | |
| /(kg·m−3) | 860 |
| /(Pa) | 7.0 × 108 |
| /(m2) | 5.67 × 10−3 |
| /(m2) | 1.26 × 10−3 |
| /(Pa) | 2.5 × 107 |
| Working Conditions | Control Mode | Vehicle Vertical Acceleration/(m·s−2) | Suspension Dynamic Deflection/m | Dynamic Wheel Load/kN |
|---|---|---|---|---|
| Class C road | PS Control | 0.5273 | 0.009932 | 49.2491 |
| LQR Control FPL Control | 0.4125 0.3028 | 0.006751 0.004158 | 37.2455 33.8156 | |
| Decline ratio/% | LQR versus PS FPL versus PS | 21.77% 42.58% | 32.03% 58.14% | 24.37% 31.34% |
| Raised road | PS Control | 1.3542 | 0.02191 | 48.4185 |
| LQR Control | 0.8924 | 0.01352 | 36.5326 | |
| FPL Control | 0.6512 | 0.00904 | 23.6748 | |
| Decline ratio/% | LQR versus PS FPL versus PS | 34.10% 51.91% | 38.29% 58.74% | 24.55% 51.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, D.; Gong, M.; Wang, Y.; Zhao, D. A Position–Force Feedback Optimal Control Strategy for Improving the Passability and Wheel Grounding Performance of Active Suspension Vehicles in a Coordinated Manner. Processes 2025, 13, 1241. https://doi.org/10.3390/pr13041241
Zhao D, Gong M, Wang Y, Zhao D. A Position–Force Feedback Optimal Control Strategy for Improving the Passability and Wheel Grounding Performance of Active Suspension Vehicles in a Coordinated Manner. Processes. 2025; 13(4):1241. https://doi.org/10.3390/pr13041241
Chicago/Turabian StyleZhao, Donghua, Mingde Gong, Yaokang Wang, and Dingxuan Zhao. 2025. "A Position–Force Feedback Optimal Control Strategy for Improving the Passability and Wheel Grounding Performance of Active Suspension Vehicles in a Coordinated Manner" Processes 13, no. 4: 1241. https://doi.org/10.3390/pr13041241
APA StyleZhao, D., Gong, M., Wang, Y., & Zhao, D. (2025). A Position–Force Feedback Optimal Control Strategy for Improving the Passability and Wheel Grounding Performance of Active Suspension Vehicles in a Coordinated Manner. Processes, 13(4), 1241. https://doi.org/10.3390/pr13041241