

Thermal, Lighting and IAQ Control System for Energy Saving and Comfort Management



Abstract
1. Introduction
- The design of flexible simulation and control frameworks that allow the modelization and simulation of different environments and the test and comparison of different controllers is not present in the literature. In the design of control systems for energy saving and comfort management in HBA, flexible frameworks can represent a significant tool for designing and prototyping optimal control solutions.
- An assessment of advanced PID control architectures for energy savings and comfort management in HBA is not present in the literature. Exploiting non-standard PID control architectures, coupled control of thermal, lighting, and IAQ subprocesses can be obtained. In this way, unexpected control margins can be detected and control performance can be improved over standard PID solutions.
- The combination of advanced PID control architectures with DEDS for energy savings and comfort management in HBA is not present in the literature. This combination can result in a significant improvement in energy savings and comfort management performances with respect to more standard control architectures.
2. Materials and Methods
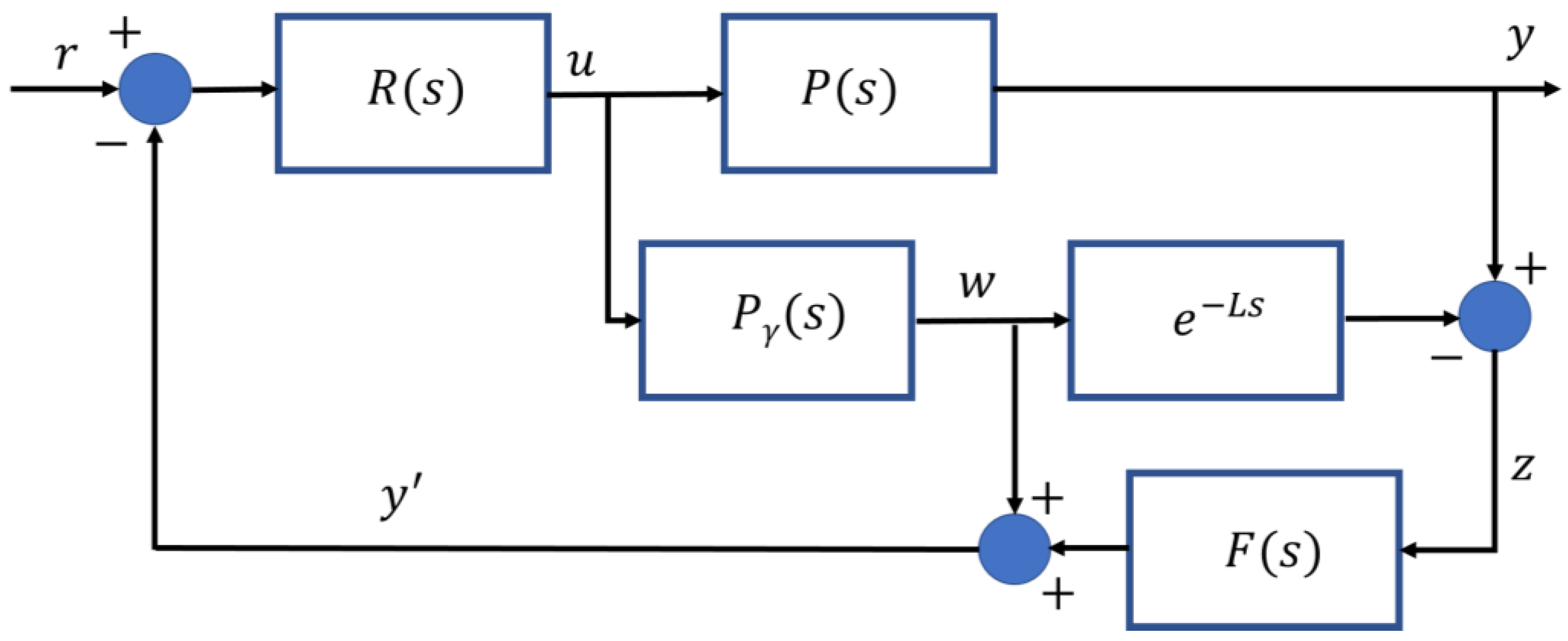
2.1. PID Control Architectures
2.2. HVAC Simulation Framework
2.2.1. Thermal Model
2.2.2. Lighting Model
2.2.3. IAQ Model
2.2.4. Case Study Additional Details
2.3. HVAC Control Framework
2.3.1. Initial Control System
- Period of the day (i.e., daytime, nighttime)
- Presence or absence of solar radiation
- Thresholds on the tracking error between the desired reference temperature and the room temperature at different ranges were defined (e.g., tracking error range 0 is associated with a tracking error in the range between −0.2 [°C] and 0.2 [°C])
- Thresholds on the difference between the room temperature and the outside temperature at different ranges were defined (e.g., difference range 0 is associated with a difference in the range between −2 [°C] and 2 [°C], while a range 1 is associated with a difference greater than 2 [°C])
- Control efforts required for the heat pump
- System switch off
2.3.2. Modified Control System
- CO2: 1500 [ppm];
- HCHO: 0.1 [ppm];
- TVOC: 300 [].
2.4. Software
3. Results and Discussion
3.1. Modelization Results
3.2. Control Results
3.3. Energy Saving Results
4. Conclusions
- The option to test and simulate different control systems in a flexible framework;
- The assessment of different advanced PID control architectures with the goal of achieving a coupled control of thermal, lighting, and IAQ subprocesses;
- The combination of advanced PID control architectures with DEDS for energy-saving and comfort management.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- European Parliament. Directive 2010/31/EU of the European Parliament and of the Council of 19 May 2010 on the energy performance of buildings (recast). Off. J. Eur. Union 2010, 31, L153/13–L153/35. Available online: https://eur-lex.europa.eu/LexUriServ/LexUriServ.do?uri=OJ:L:2010:153:0013:0035:en:PDF (accessed on 6 September 2022).
- European Parliament. Directive 2018/844 of the European Parliament and of the Council of 30 May 2018 amending Directive 2010/31/EU on the energy performance of buildings and Directive 2012/27/EU on energy efficiency (Text with EEA relevance). Off. J. Eur. Union 2018, L156/75–L156/91. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32018L0844&from=IT (accessed on 6 September 2022).
- International Energy Agency, & United Nations Environment Programme. 2018 Global Status Report: Towards a Zero-Emission, Efficient and Resilient Buildings and Construction Sector. 2018. Available online: https://wedocs.unep.org/20.500.11822/27140 (accessed on 6 September 2022).
- United Nations. Agenda 2030. Available online: https://unric.org/it/agenda-2030/ (accessed on 6 October 2022).
- Ministero delle Imprese e del Made in Italy. PNRR. Available online: https://www.mise.gov.it/index.php/it/pnrr (accessed on 6 October 2022).
- Ciardiello, A.; Rosso, F.; Dell’Olmo, J.; Ciancio, V.; Ferrero, M.; Salata, F. Multi-objective approach to the optimization of shape and envelope in building energy design. Appl. Energy 2020, 280, 115984. [Google Scholar] [CrossRef]
- Zanoli, S.M.; Cocchioni, F.; Pepe, C. MPC-based energy efficiency improvement in a pusher type billets reheating furnace. Adv. Sci. Technol. Eng. Syst. J. 2018, 3, 74–84. [Google Scholar] [CrossRef]
- Zanoli, S.M.; Pepe, C.; Rocchi, M. Control and Optimization of a Cement Rotary Kiln: A Model Predictive Control Approach. In Proceedings of the 2016 Indian Control Conference (ICC), Hyderabad, India, 4–6 January 2016. [Google Scholar] [CrossRef]
- Zanoli, S.M.; Astolfi, G.; Orlietti, L.; Frisinghelli, M.; Pepe, C. Water Distribution Networks Optimization: A real case study. IFAC-PapersOnLine 2020, 53, 16644–16650. [Google Scholar] [CrossRef]
- Zanoli, S.M.; Pepe, C.; Rocchi, M. Cement Rotary Kiln: Constraints Handling and Optimization via Model Predictive Control Techniques. In Proceedings of the 2015 5th Australian Control Conference (AUCC), Gold Coast, QLD, Australia, 5–6 November 2015; Available online: https://ieeexplore.ieee.org/document/7361950 (accessed on 1 December 2020).
- Zanoli, S.M.; Pepe, C.; Rocchi, M.; Astolfi, G. Application of Advanced Process Control Techniques for a Cement Rotary Kiln. In Proceedings of the 2015 19th International Conference on System Theory, Control and Computing (ICSTCC), Cheile Gradistei, Romania, 14–16 October 2015. [Google Scholar] [CrossRef]
- ASHRAE. Available online: https://www.ashrae.org/ (accessed on 6 October 2022).
- Mayhoub, M.; Carter, D. A feasibility study for hybrid lighting systems. Build. Environ. 2012, 53, 83–94. [Google Scholar] [CrossRef]
- Akkaya, K.; Guvenc, I.; Aygun, R.; Pala, N.; Kadri, A. IoT-Based Occupancy Monitoring Techniques for Energy-Efficient Smart Buildings. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), New Orleans, LA, USA, 9–12 March 2015. [Google Scholar] [CrossRef]
- Leal, S.; Zucker, G.; Hauer, S.; Judex, F. A Software Architecture for Simulation Support in Building Automation. Buildings 2014, 4, 320–335. [Google Scholar] [CrossRef]
- Santos, A.; Liu, N.; Jradi, M. Design, Development and Implementation of a Novel Parallel Automated Step Response Testing Tool for Building Automation Systems. Buildings 2022, 12, 1479. [Google Scholar] [CrossRef]
- Xie, X.; Ramakrishna, S.; Manganelli, M. Smart Building Technologies in Response to COVID-19. Energies 2022, 15, 5488. [Google Scholar] [CrossRef]
- Pedersen, J.M.; Jebaei, F.; Jradi, M. Assessment of Building Automation and Control Systems in Danish Healthcare Facilities in the COVID-19 Era. Appl. Sci. 2022, 12, 427. [Google Scholar] [CrossRef]
- Saleem, A.A.; Hassan, M.M.; Ali, I.A. Smart Homes Powered by Machine Learning: A Review. In Proceedings of the 2022 International Conference on Computer Science and Software Engineering (CSASE), Duhok, Iraq, 15–17 March 2022. [Google Scholar] [CrossRef]
- Fayaz, M.; Kim, D. Energy Consumption Optimization and User Comfort Management in Residential Buildings Using a Bat Algorithm and Fuzzy Logic. Energies 2018, 11, 161. [Google Scholar] [CrossRef]
- Sun, B.; Luh, P.B.; Jia, Q.-S.; Jiang, Z.; Wang, F.; Song, C. Building Energy Management: Integrated Control of Active and Passive Heating, Cooling, Lighting, Shading, and Ventilation Systems. IEEE Trans. Autom. Sci. Eng. 2012, 10, 588–602. [Google Scholar] [CrossRef]
- Liu, W.; Wang, Y.; Jiang, F.; Cheng, Y.; Rong, J.; Wang, C.; Peng, J. A Real-time Demand Response Strategy of Home Energy Management by Using Distributed Deep Reinforcement Learning. In Proceedings of the 2021 IEEE 23rd International Conferences on High Performance Computing & Communications; 7th 23rd International Conferences on Data Science & Systems; 19th 23rd International Conferences on Smart City; 7th International Conferences on Dependability in Sensor, Cloud & Big Data Systems & Application (HPCC/DSS/SmartCity/DependSys), Haikou, China, 20–22 December 2021. [Google Scholar] [CrossRef]
- Khalid, R.; Javaid, N.; Rahim, M.H.; Aslam, S.; Sher, A. Fuzzy energy management controller and scheduler for smart homes. Sustain. Comput. Informatics Syst. 2019, 21, 103–118. [Google Scholar] [CrossRef]
- Soyguder, S.; Alli, H. Simulation and Modelling of HVAC System Having Two Zones with Different Properties. In Proceedings of the TOK2006 conference, Ankara, Turkey, 31 August–1 September 2006. [Google Scholar]
- Zhou, J.Q.; Claridge, D.E. PI tuning and robustness analysis for air handler discharge air temperature control. Energy Build. 2012, 44, 1–6. [Google Scholar] [CrossRef]
- Almabrok, A.; Psarakis, M.; Dounis, A. Fast Tuning of the PID Controller in An HVAC System Using the Big Bang–Big Crunch Algorithm and FPGA Technology. Algorithms 2018, 11, 146. [Google Scholar] [CrossRef]
- Yamazaki, T.; Yamakawa, Y.; Kamimura, K.; Kurosu, S. Air-Conditioning PID Control System with Adjustable Reset to Offset Thermal Loads Upsets. In Advances in PID Control; IntechOpen: London, UK, 2011. [Google Scholar] [CrossRef]
- Blasco, C.; Monreal, J.; Benítez, I.; Lluna, A. Modelling and PID Control of HVAC System According to Energy Efficiency and Comfort Criteria. In Sustainability in Energy and Buildings. Smart Innovation, Systems and Technologies; M’Sirdi, N., Namaane, A., Howlett, R.J., Jain, L.C., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; Volume 12. [Google Scholar] [CrossRef]
- Soyguder, S.; Karakose, M.; Alli, H. Design and simulation of self-tuning PID-type fuzzy adaptive control for an expert HVAC system. Expert Syst. Appl. 2009, 36, 4566–4573. [Google Scholar] [CrossRef]
- Wang, J.-M.; Yang, M.-T.; Chen, P.-L. Design and Implementation of an Intelligent Windowsill System Using Smart Handheld Device and Fuzzy Microcontroller. Sensors 2017, 17, 830. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, W.; Chu, X.; Liu, Y. Fuzzy logic controller for energy savings in a smart LED lighting system considering lighting comfort and daylight. Energy Build. 2016, 127, 95–104. [Google Scholar] [CrossRef]
- Ain, Q.-U.; Iqbal, S.; Mukhtar, H. Improving Quality of Experience Using Fuzzy Controller for Smart Homes. IEEE Access 2022, 10, 11892–11908. [Google Scholar] [CrossRef]
- Fontes, F.; Antão, R.; Mota, A.; Pedreiras, P. Improving the Ambient Temperature Control Performance in Smart Homes and Buildings. Sensors 2021, 21, 423. [Google Scholar] [CrossRef]
- Serale, G.; Fiorentini, M.; Capozzoli, A.; Bernardini, D.; Bemporad, A. Model Predictive Control (MPC) for Enhancing Building and HVAC System Energy Efficiency: Problem Formulation, Applications and Opportunities. Energies 2018, 11, 631. [Google Scholar] [CrossRef]
- Yao, Y.; Shekhar, D.K. State of the art review on model predictive control (MPC) in Heating Ventilation and Air-conditioning (HVAC) field. Build. Environ. 2021, 200, 107952. [Google Scholar] [CrossRef]
- Piotrowska-Woroniak, J.; Szul, T.; Cieśliński, K.; Krilek, J. The Impact of Weather-Forecast-Based Regulation on Energy Savings for Heating in Multi-Family Buildings. Energies 2022, 15, 7279. [Google Scholar] [CrossRef]
- Aström, K.J.; Hägglund, T. PID Controllers: Theory, Design, and Tuning; ISA: Research Triangle Park, NC, USA, 1995. [Google Scholar]
- O’Dwyer, A. Handbook of PI and PID Controller Tuning Rules; Imperial College Press: London, UK, 2009. [Google Scholar] [CrossRef]
- Ljung, L. System Identification. Theory for the User; Prentice-Hall PTR: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Shinskey, F.G. Process Control Systems: Application, Design, and Tuning; McGraw-Hill Professional Publishing: New York, NY, USA, 1996. [Google Scholar]
- Morari, M.; Zafiriou, E. Robust Process Control; Prentice-Hall PTR: Hoboken, NJ, USA, 1988. [Google Scholar]
- Cammarata, G.; Fichera, A.; Forgia, F.; Marletta, L.; Muscato, G. Thermal Load Buildings: General Models and Reduced Models. In Proceedings of the Health Buildings, the 3rd International Conferences, Budapest, Hungary, 22–25 August 1994. [Google Scholar]
- Mitsios, I.; Kolokotsa, D.; Stavrakakis, G.; Kalaitzakis, K.; Pouliezos, A. Developing a Control Algorithm for CEN Indoor Environmental Criteria—Addressing Air Quality, Thermal Comfort and Lighting. In Proceedings of the 2009 17th Mediterranean Conference on Control and Automation, Thessaloniki, Greece, 24–26 June 2009. [Google Scholar] [CrossRef]
- De Santoli, L. Trasmissione del Calore. In Fisica Tecnica Ambientale; CEA: Milan, Italy, 1999; Volume 2. [Google Scholar]
- Collares-Pereira, M.; Rabl, A. The average distribution of solar radiation-correlations between diffuse and hemispherical and between daily and hourly insolation values. Sol. Energy 1979, 22, 155–164. [Google Scholar] [CrossRef]
- Bonomo, M. Illuminazione D’interni; Maggioli Editore: Santarcangelo di Romagna, Italy, 2009. [Google Scholar]
- Paribeni, M.; Parolini, G. Tecnica Dell’illuminazione; UTET: Torino, Italy, 2009. [Google Scholar]
- Wargocki, P.; Wyon, D.P.; Baik, Y.K.; Clausen, G.; Fanger, P.O. Perceived Air Quality, Sick Building Syndrome (SBS) Symptoms and Productivity in an Office with Two Different Pollution Loads. Indoor Air 1999, 9, 165–179. [Google Scholar] [CrossRef]
- Dasi, H.; Xiaowei, F.; Daisheng, C. On-Line Control Strategy of Fresh Air to Meet the Requirement of IAQ in Office Buildings. In Proceedings of the 2010 5th IEEE Conference on Industrial Electronics and Applications, Taichung, Taiwan, 15–17 June 2010. [Google Scholar] [CrossRef]
- Bako-Biro, Z.; Wargocki, P.; Weschler, C.J.; Fanger, P.O. Effects of pollution from personal computers on perceived air quality, SBS symptoms and productivity in offices. Indoor Air 2004, 14, 178–187. [Google Scholar] [CrossRef]
- Kawachi, S.; Hagiwara, H.; Baba, J.; Furukawa, K.; Shimoda, E.; Numata, S. Modeling and Simulation of Heat Pump Air Conditioning Unit Intending Energy Capacity Reduction of Energy Storage System in Microgrid. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011. [Google Scholar]
- European Parliament. Directive 2008/50/EC of the European Parliament and of the Council of 21 May 2008 on ambient air quality and cleaner air for Europe. Off. J. Eur. Union 2008, L152/1. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/HTML/?uri=CELEX:32008L0050&from=IT (accessed on 6 September 2022).
- European Parliament. Commission Directive (EU) 2015/1480 of 29 August 2015 amending several annexes to Directives 2004/107/EC and 2008/50/EC of the European Parliament and of the Council laying down the rules concerning reference methods, data validation and location of sampling points for the assessment of ambient air quality. Off. J. Eur. Union 2015, L226/4. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/HTML/?uri=CELEX:32015L1480&from=EN (accessed on 6 September 2022).
- International Energy Agency. CO2 Emissions from Fuel Combustion 2019; IEA: Paris, France, 2019. [Google Scholar] [CrossRef]
- Cassandras, C.G.; Lafortune, S. Introduction to Discrete Event Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Health and Safety Executive (HSE). Lighting at Work; HSE Books: Norwich, UK, 1998. [Google Scholar]
- Brager, G.S.; de Dear, R.J. Climate, comfort & natural ventilation: A new adaptive comfort standard for ASHRAE Standard 55. In Proceedings of the Moving Thermal Comfort Standards into the 21st Century, Windsor, UK, 5–8 April 2001; Available online: http://www.escholarship.org/uc/item/2048t8nn. (accessed on 1 December 2020).
- MathWorks. Available online: https://it.mathworks.com/ (accessed on 24 October 2022).











































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | |||
|---|---|---|---|
| P | |||
| PI | |||
| PID |
| Controller | |||
|---|---|---|---|
| P | |||
| PI | |||
| PID |
| Component/Device | Features | SI Measurement Unit |
|---|---|---|
| Room | ||
| Wall-SW | , Vertical | |
| Wall-NW | , Vertical | |
| Wall-NE | [5.0 2.7], Vertical, (Not Exposed) | |
| Wall-SE | [4.0 2.7], Vertical, (Not Exposed) | |
| Wall-A | [5.0 4.0], Horizontal | |
| Wall-B | [5.0 4.0], Horizontal, (Not Exposed) | |
| Window-SW1 | [2 1.25 1], Vertical | |
| Window-SW2 | [2 1.25 1], Vertical | |
| Heat Pump | COP * = 2.8, Max Power = 4 | |
| Artificial Light (Dimmer) | location (2.5, 2.0, 2.4), Flux = 8900 |
| Symbol | Description | SI Measurement Unit |
|---|---|---|
| Heat supplied by internal heat sources (people, lamps, and motors) | ||
| heat supplied by heat pump source | ||
| heat supplied by walls | ||
| , | heat supplied by windows | |
| heat supplied by the outside environment | ||
| th wall area | ||
| th wall adduction coefficient | ||
| th glass adduction coefficient | ||
| , | solar gain coefficient (th glass, th glass/shutter) | |
| number of times air is exchanged through the th window opening | ||
| air density | ||
| air specific heat | ||
| room air mass | ||
| air incoming volume (fixed value) from th window | ||
| temperature of th layer of th wall | ||
| th internal temperature of glass | ||
| th internal temperature of glass combined with shutters | ||
| room temperature | ||
| outside temperature | ||
| th glass area | ||
| th shutter actuation factor | ||
| th glass solar thermal radiation |
| Symbol | Description | SI Measurement Unit |
|---|---|---|
| temperature of th layer of th wall | ||
| th glass solar thermal radiation | ||
| room temperature | ||
| outside temperature | ||
| th wall solar thermal radiation | ||
| th wall area | ||
| thermal transmittance between layers and of the wall | ||
| thermal transmittance between layer one of the wall and outdoor air | ||
| thermal transmittance between layer five of the wall and indoor air | ||
| mass of the layer of the wall | ||
| specific heat of the layer of the wall | ||
| absorption coefficient of the wall | ||
| adduction coefficient of the wall | ||
| thermal resistance of the wall | ||
| internal flux parameter | ||
| th glass area | ||
| th glass transparency | ||
| th shutter shading factor |
| Symbol | Description | SI Measurement Unit |
|---|---|---|
| environment illuminance at the point of interest | ||
| natural diffuse illuminance on the window | ||
| natural reflection illuminance on glass | ||
| natural direct illuminance on glass | ||
| , | environmental influence of natural diffuse/reflections illuminance at the point of interest | |
| artificial light source luminous emission | ||
| luminous flux of the artificial light source | ||
| incidence angle of the light radiation in relation to the point of interest | ||
| distance between the point of interest and light source | ||
| th glass transparency | ||
| natural direct illuminance coefficient | ||
| th glass area | ||
| reflection coefficient | ||
| average reflection coefficient of the walls | ||
| total area of the reflective walls | ||
| th glass area | ||
| efficiency of artificial light source | ||
| maintenance factor |
| Symbol | Description | SI Measurement Unit |
|---|---|---|
| room | ||
| number of people in the room | ||
| emissions for each people (sedentary) | ||
| standard conditions air | ||
| natural ventilation flow rate | ||
| room volume | ||
| room | ||
| number of the room’s furniture | ||
| room’s th furniture area | ||
| room’s th furniture emissions per unit area | ||
| room | ||
| room area | ||
| room’s th furniture emissions per unit area | ||
| opening width of the window | ||
| height of the window | ||
| wind speed |
| State | Window | Rolling Shutters | Heat Pump |
|---|---|---|---|
| S1 | 1 | 1 | 0 |
| S2 | 1 | 0 | 0 |
| S3 | 0 | 1 | 1 |
| S4 | 0 | 1 | 0 |
| S5 | 0 | 0 | 1 |
| S6 | 0 | 0 | 0 |
| Event | Description |
|---|---|
| 0 | switch-off of the devices |
| 1 | daytime, solar radiation, tracking error range 0, difference range 0 |
| 2 | daytime, no solar radiation, tracking error range 0, difference range 0 |
| 3 | daytime, solar radiation, tracking error range 0, difference range 1 |
| 4 | daytime, no solar radiation, tracking error range 0, difference range 1 |
| Event | Initial State S1 | Initial State S2 | Initial State S3 | Initial State S4 | Initial State S5 | Initial State S6 |
|---|---|---|---|---|---|---|
| 0 | S6 | S6 | S6 | S6 | S6 | S6 |
| 1 | S1 | S1 | S3 | S4 | S3 | S4 |
| 2 | S2 | S2 | S5 | S6 | S5 | S6 |
| 3 | S4 | S4 | S3 | S4 | S3 | S4 |
| 4 | S6 | S6 | S5 | S6 | S5 | S6 |
| Symbol | Description |
|---|---|
| EC|0101 | PID controller, lighting control |
| TC|0102 | PID controller, thermal control |
| TEC|0103 | PID controller, thermal limitation |
| MPC|0102 | PID controller, motor position control |
| TEC|0105 | PID controller, lighting limitation |
| MPC|0101 | PID controller, dimmer position control |
| MODE | Logic, control mode |
| XC|001 | Logic, presence radiation |
| XC|002 | Logic, no excessive brightness |
| AC|001 | PID controller, CO2 limitation |
| AC|002 | PID controller, HCHO limitation |
| Parameter | Initial Tuning Value | Final Tuning Value |
|---|---|---|
| 0.24 [°C/W] | 0.24 [°C/W] | |
| 600 [s] | 20 [s] | |
| 150 [s] | 150 [s] |
| Standard Decoupled PID (Open/Closed Shutters) | Standard Decoupled PID (Half-Open Shutters) | |||
|---|---|---|---|---|
| Initialcontrol system (Energy Saving) | Spring 32 [%] | Summer 47 [%] | Spring 29 [%] | Summer 35 [%] |
| Autumn 24 [%] | Winter 21 [%] | Autumn 16 [%] | Winter 13 [%] | |
| Initialcontrol system (Comfort) | Spring 11 [%] | Summer 41 [%] | Spring 6 [%] | Summer 25 [%] |
| Autumn 22 [%] | Winter 19 [%] | Autumn 15 [%] | Winter 11 [%] | |
| Standard Decoupled PID (Open/Closed Shutters) | Standard Decoupled PID (Half-Open Shutters) | |||
|---|---|---|---|---|
| Modifiedcontrol system (Energy Saving) | Spring 32.5 [%] | Summer 48 [%] | Spring 30 [%] | Summer 35.5 [%] |
| Autumn 24.5 [%] | Winter 22 [%] | Autumn 16.5 [%] | Winter 14 [%] | |
| Modifiedcontrol system (Comfort) | Spring 12 [%] | Summer 42 [%] | Spring 7 [%] | Summer 26 [%] |
| Autumn 23 [%] | Winter 20 [%] | Autumn 15.5 [%] | Winter 12 [%] | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zanoli, S.M.; Pepe, C. Thermal, Lighting and IAQ Control System for Energy Saving and Comfort Management. Processes 2023, 11, 222. https://doi.org/10.3390/pr11010222
Zanoli SM, Pepe C. Thermal, Lighting and IAQ Control System for Energy Saving and Comfort Management. Processes. 2023; 11(1):222. https://doi.org/10.3390/pr11010222
Chicago/Turabian StyleZanoli, Silvia Maria, and Crescenzo Pepe. 2023. "Thermal, Lighting and IAQ Control System for Energy Saving and Comfort Management" Processes 11, no. 1: 222. https://doi.org/10.3390/pr11010222
APA StyleZanoli, S. M., & Pepe, C. (2023). Thermal, Lighting and IAQ Control System for Energy Saving and Comfort Management. Processes, 11(1), 222. https://doi.org/10.3390/pr11010222