
Trajectory Planning of the Exit Point for a Cable-Driven Parallel Mechanism by Considering the Homogeneity of Tension Variation


Abstract
:1. Introduction
2. Materials and Methods
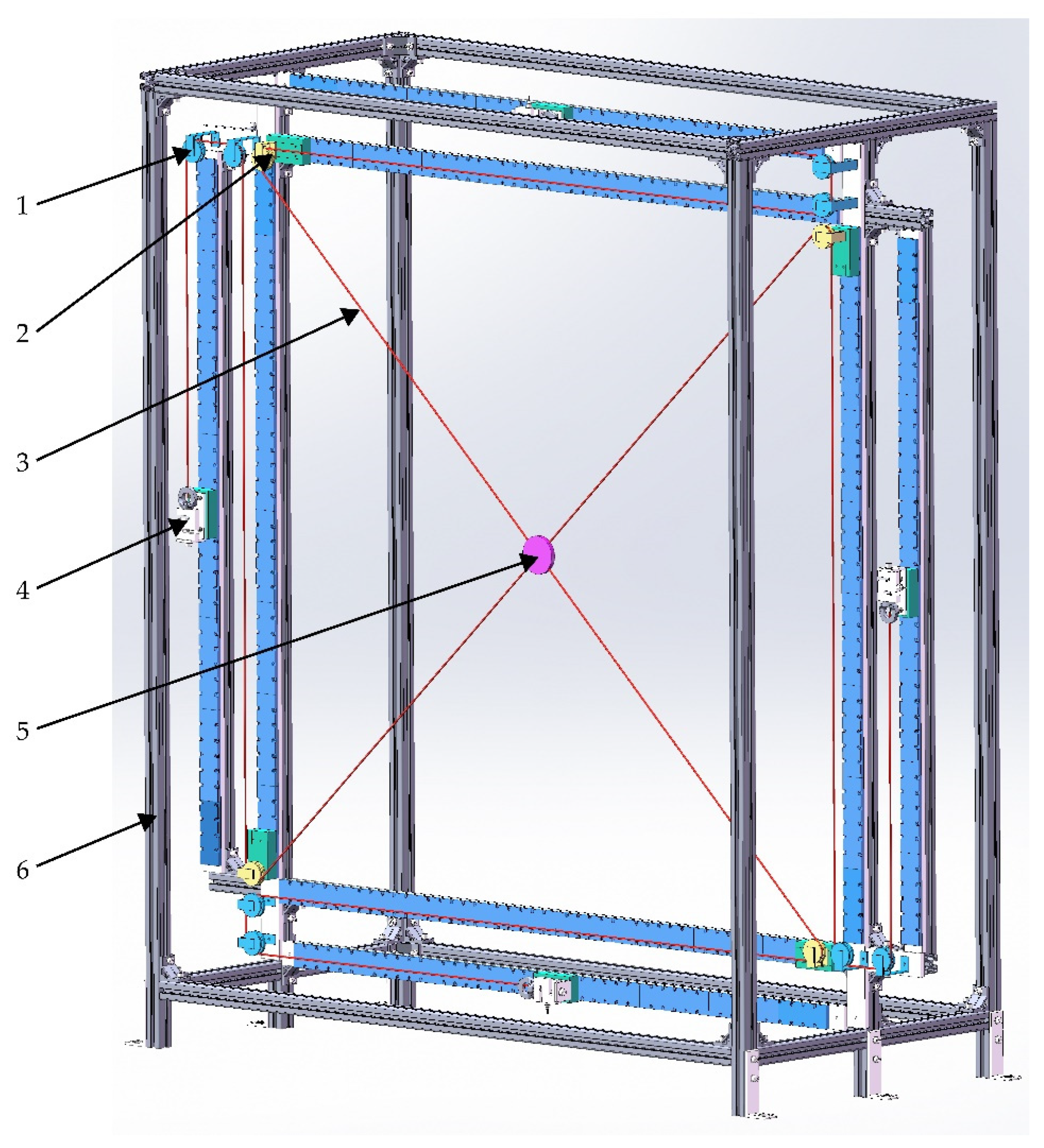
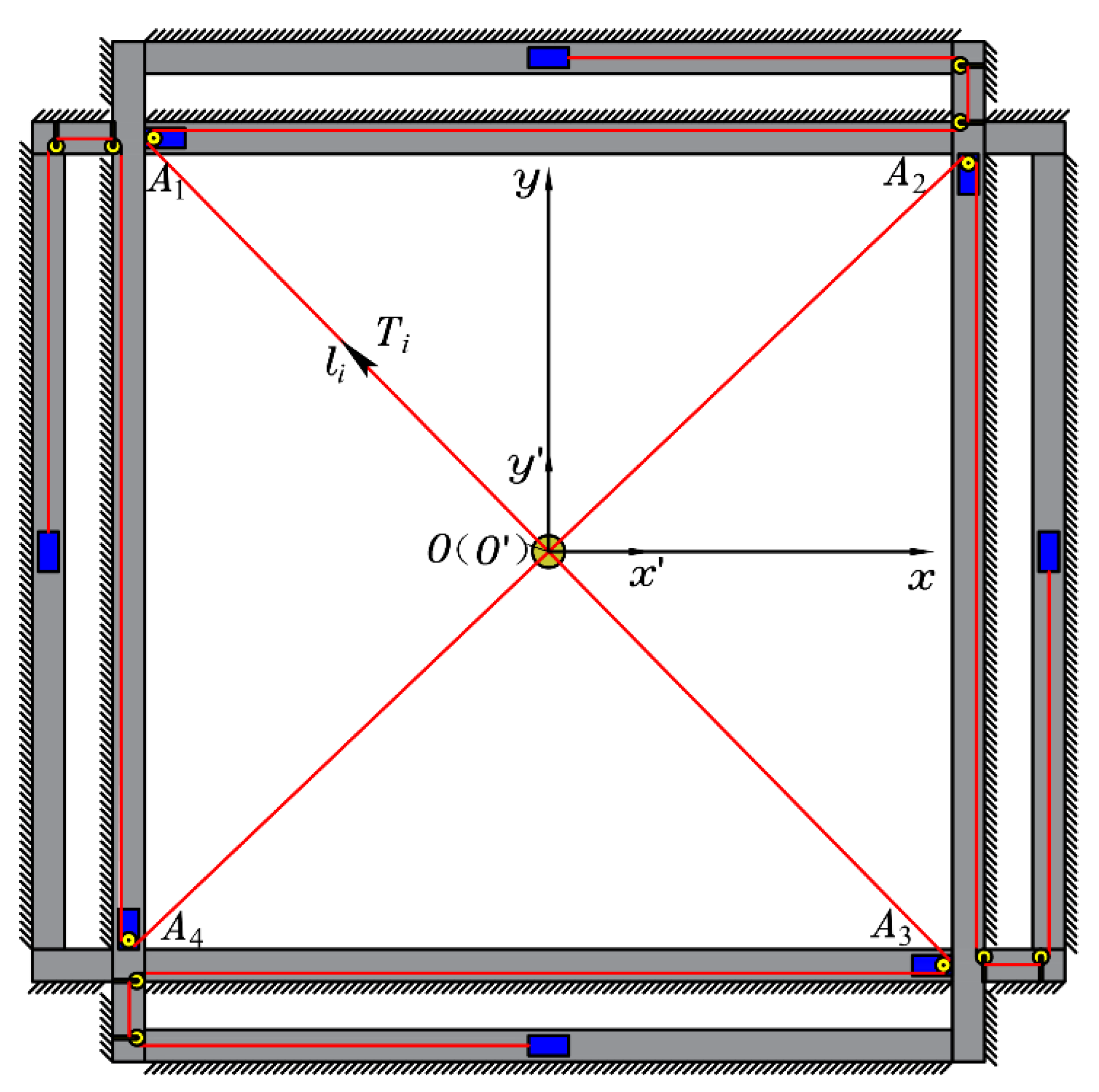
2.1. Static Modelling
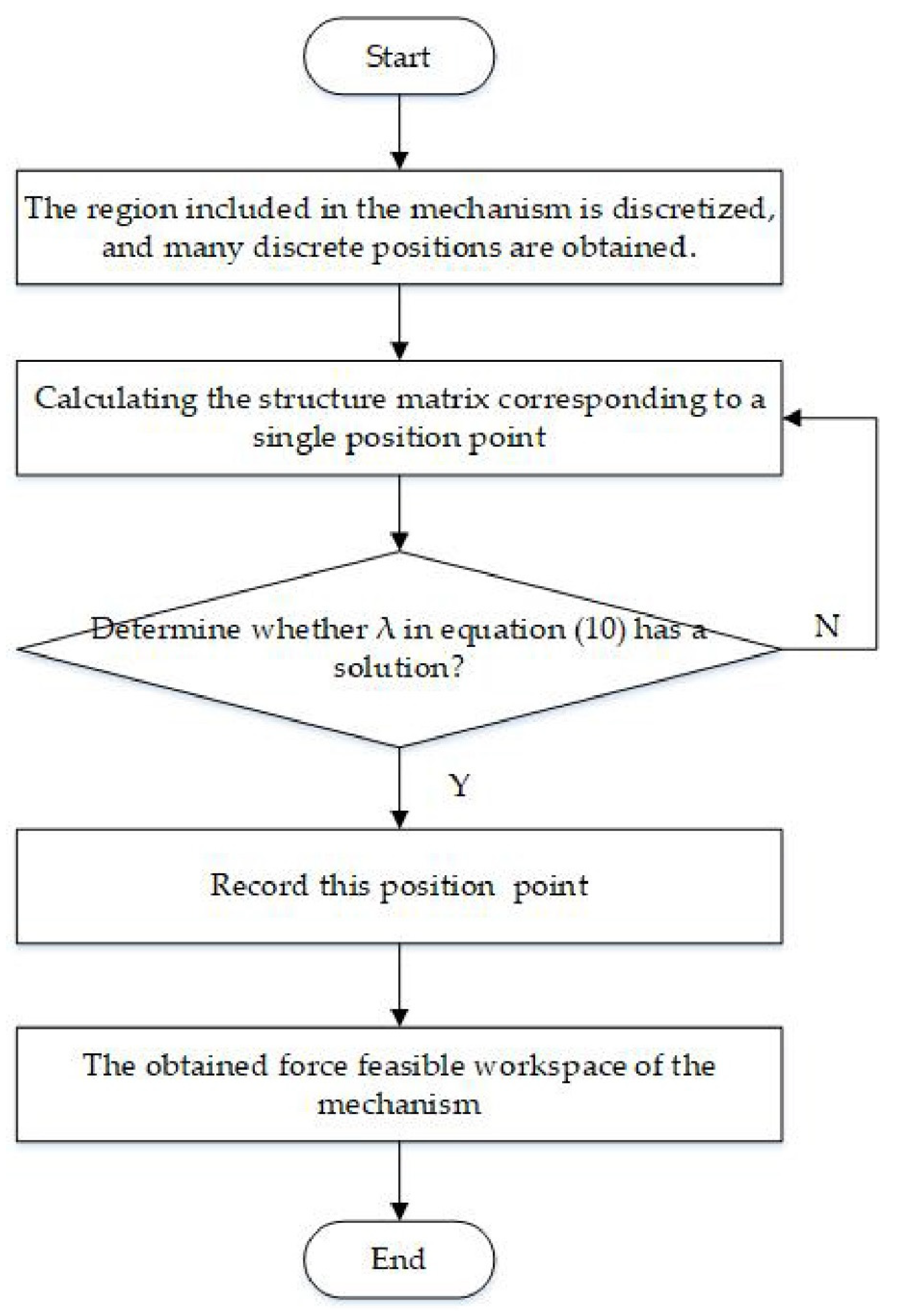
2.2. Workspace Solution Method
2.3. Solution Method of Cable Tension under Typical Trajectory
2.3.1. Solution Method of Cable Tension
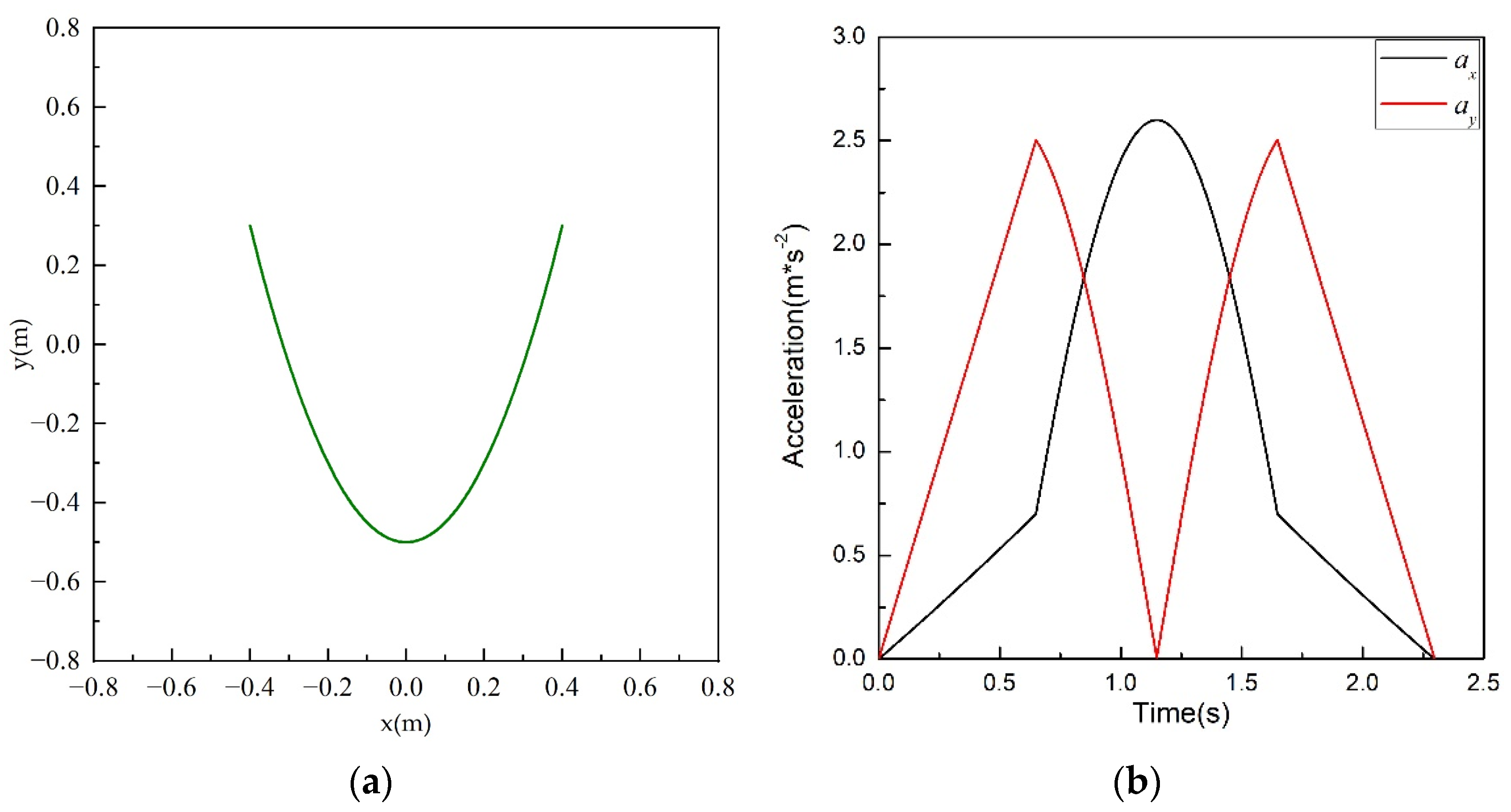
2.3.2. Three Typical Trajectories in the Workspace
2.4. Exit Point Trajectory Planning
3. Results and Discussion
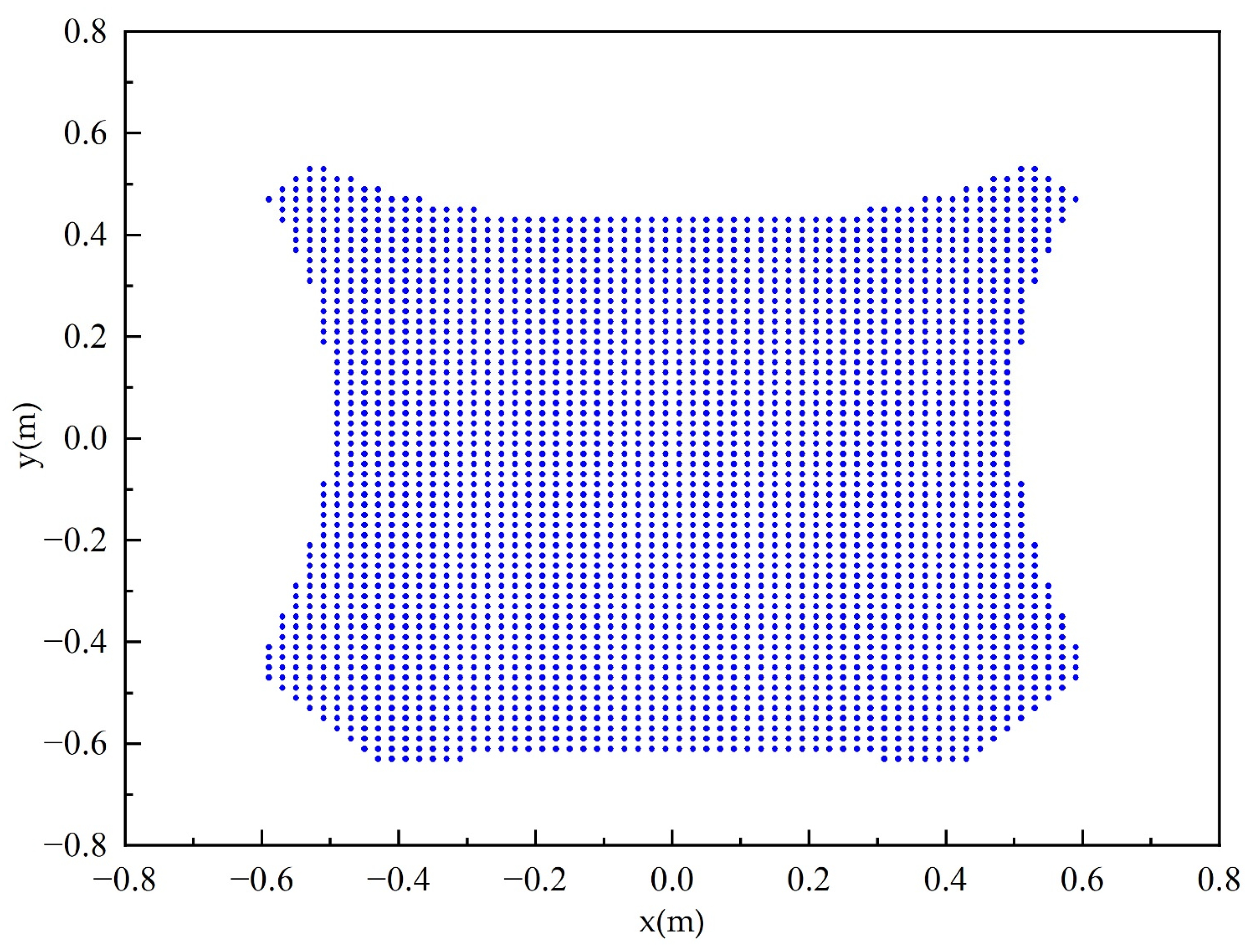
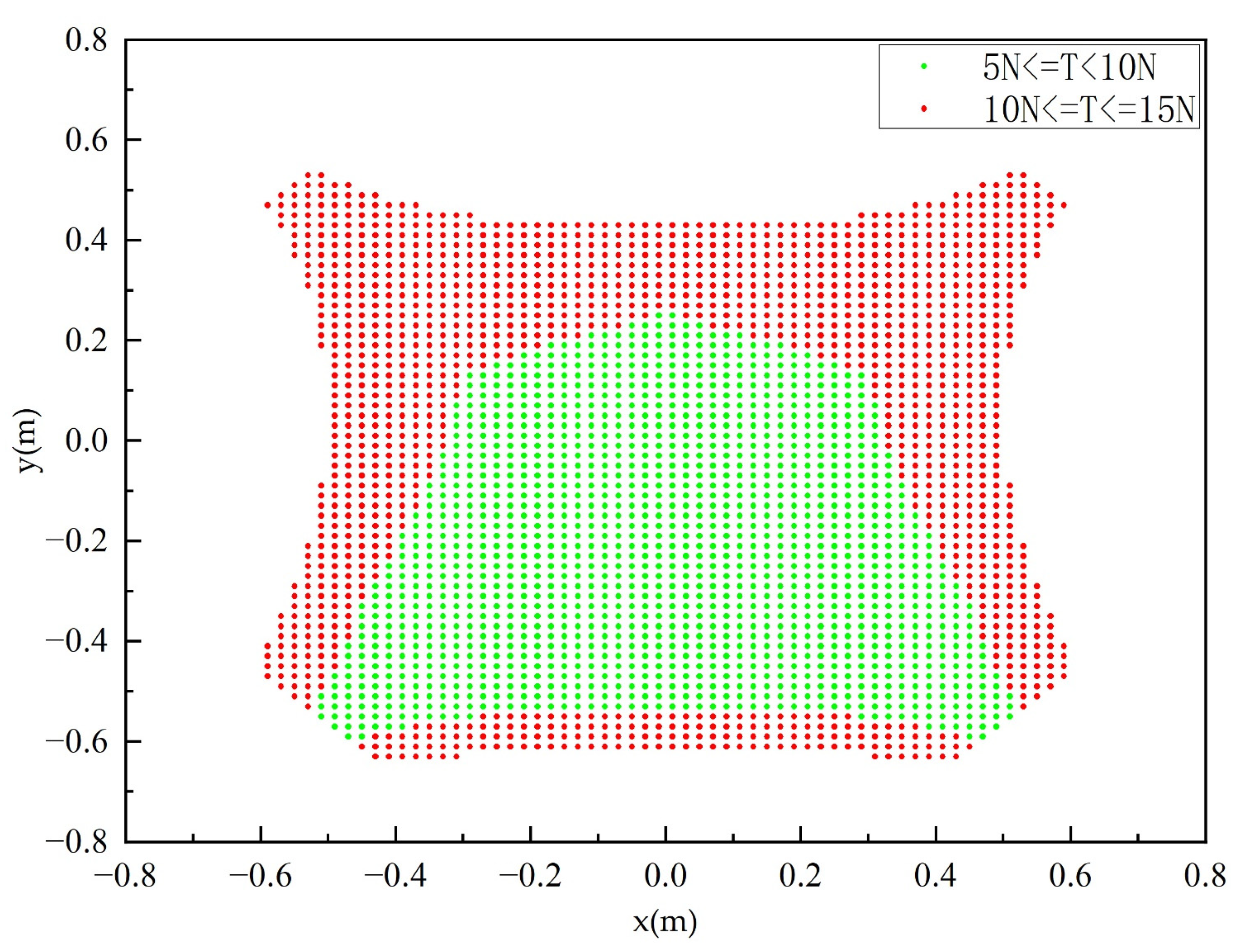
3.1. Workspace Solution Results
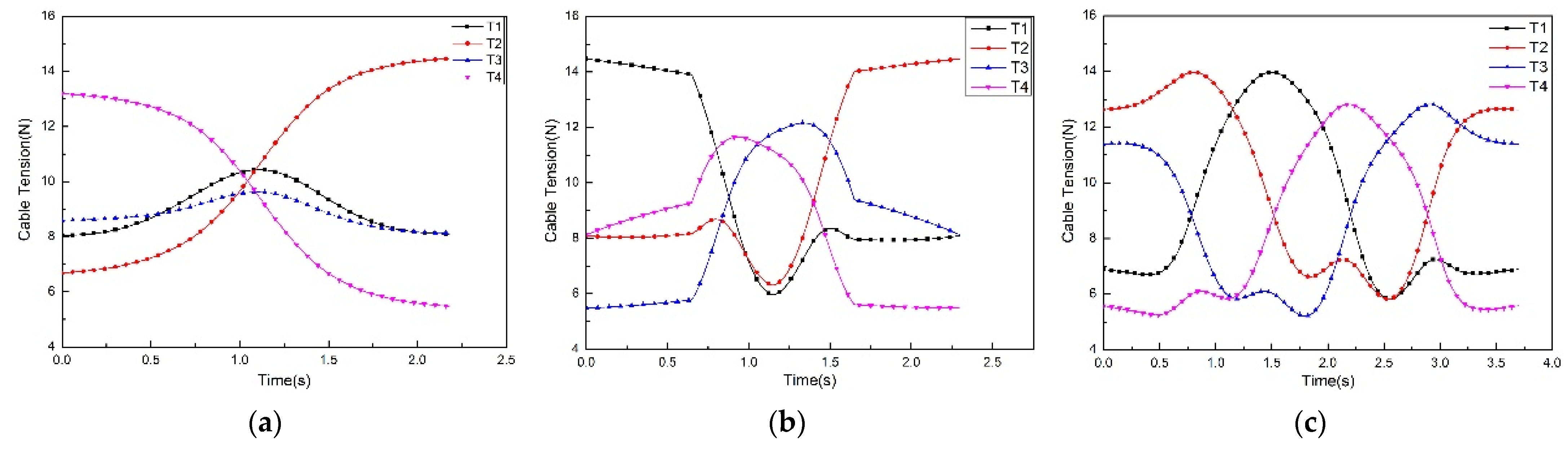
3.2. Solution Result of Cable Tension under Typical Trajectory in Workspace
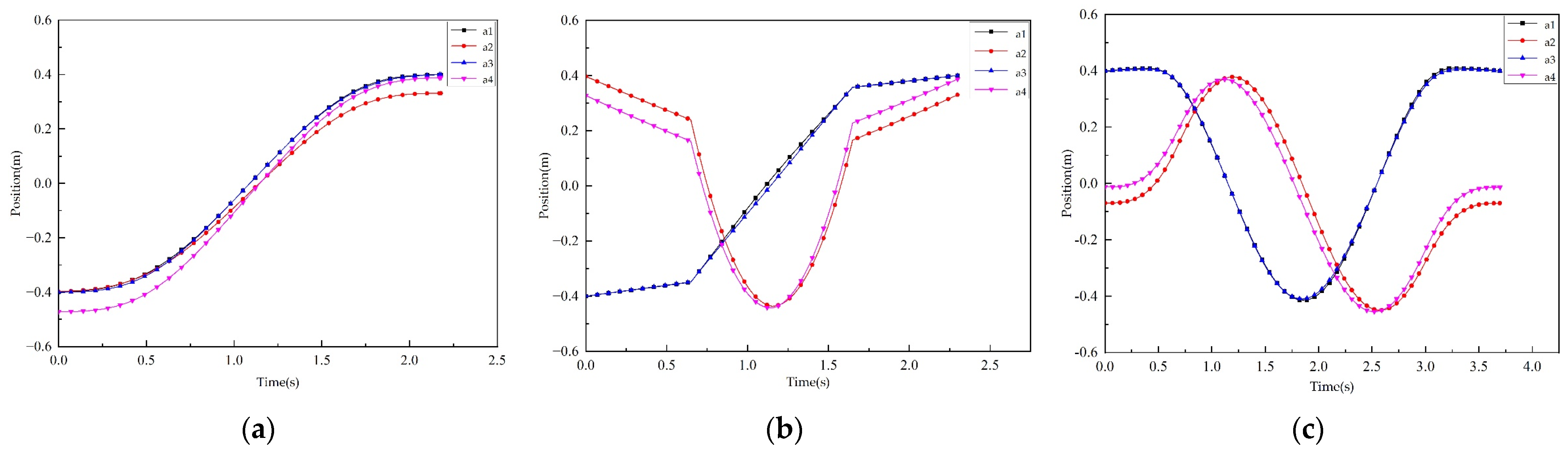
3.3. Trajectory Planning Result of the Exit Point
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Glossary
| Symbol | Meaning | Symbol | Meaning |
| Ai | The position vector of the ith exit point in the global coordinate system | g | Acceleration of gravity |
| O’ | The position of the platform in the global coordinate system | a | The acceleration of the moving platform |
| Li | The length vector of the ith cable | m | The number of cables |
| Ti | The tension vector of the ith cable | n | The number of degrees of freedom |
| Ti | The tension of the ith cable | Q | The fourth-order identity matrix |
| li | Unit vector of the ith cable tension | Tref | Reference force |
| FR | External force of moving platform | θ | The angular displacement of the moving platform |
| J | Force Jacobian matrix | a1 | The abscess value of A1 of the exit point |
| Im | Four-dimensional identity matrix | a2 | The ordinate values of A2 of the exit point |
| λ | Any 4 × 1 dimension vector | a3 | The abscess value of A3 of the exit point |
| M | The mass of the moving platform | a4 | The ordinate values of A4 of the exit point |
References
- Lei, Y.Z. Recent research advances and expectation of mechanical engineering science in China. J. Mech. Eng. 2009, 45, 1–11. [Google Scholar] [CrossRef]
- Zi, B.; Cao, J.B.; Zhu, Z.C.; Mitrouchev, P. Design, dynamics, and workspace of a hybrid-driven-based cable parallel manipulator. Math. Probl. Eng. 2013, 2013, 914653. [Google Scholar] [CrossRef] [Green Version]
- Qian, S.; Zi, B.; Shang, W.W.; Xu, Q.S. A review on cable-driven parallel robots. J. Mech. Eng. 2018, 31, 37–47. [Google Scholar] [CrossRef]
- Yang, Q.G.; Zhu, W.B. Mechanical design of the six-cable driven parallel mechanism in FAST telescope. Int. Conf. Control Autom. 2016, 11, 320–325. [Google Scholar] [CrossRef] [Green Version]
- Yao, R.; Tang, X.Q.; Wang, J.S.; Huang, P. Dimensional optimization design of the four-cable-driven parallel manipulator in FAST. IEEE ASME Trans. Mechatron. 2010, 15, 932–941. [Google Scholar] [CrossRef]
- Wang, X.G.; Hu, Y.B.; Lin, Q. Workspace analysis and verification of cable-driven parallel mechanism for wind tunnel test. Proc. Inst. Mech. Eng. Part G 2016, 231, 1012–1021. [Google Scholar] [CrossRef]
- Chen, Q.L.; Lin, Q. Analysis on metamorphic of the cable-driven parallel mechanism in wind tunnel test. Appl. Mech. Mater. 2013, 336–338, 1196–1203. [Google Scholar] [CrossRef]
- Wu, H.S.; Lin, Q.; Wang, X.G.; Ji, Y.F.; Peng, M.J. Design and kinematic analysis of cable-driven parallel mechanism for helicopter model in formation flight. In Proceedings of the IEEE CSAA Guidance, Navigation and Control Conference (CGNCC), Xiamen, China, 10–12 August 2018; p. 9018979. [Google Scholar]
- Abbasnejad, G.; Yoon, J.; Lee, H. Optimum kinematic design of a planar cable-driven parallel robot with wrench-closure gait trajectory. Mech. Mach. Theory 2016, 99, 1–18. [Google Scholar] [CrossRef]
- Hamida, I.B.; Laribi, M.A.; Mlika, A.; Romdhane, L.; Carbone, G. Multi-Objective optimal design of a cable driven parallel robot for rehabilitation tasks. Mech. Mach. Theory 2021, 156, 104141–104164. [Google Scholar] [CrossRef]
- Shi, P.S.; Tang, L.W. Dimensional synthesis of a gait rehabilitation cable-suspended robot on minimum 2-norm tensions. J. Mech. Med. Biol. 2021, 21, 2150046. [Google Scholar] [CrossRef]
- Izard, J.B.; Dubor, A.; Hervé, P.E.; Cabay, E.; Culla, D.; Rodriguez, M.; Barrado, M. Large-scale 3D printing with cable-driven parallel robots. Constr. Robot. 2017, 1, 69–76. [Google Scholar] [CrossRef]
- Qian, S.; Bao, K.L.; Zi, B.; Wang, N. Kinematic calibration of a cable-driven parallel robot for 3D printing. Sensors 2018, 18, 2898. [Google Scholar] [CrossRef] [Green Version]
- Tho, T.P.; Thinh, N.T. Using a Cable-Driven Parallel Robot with applications in 3D concrete printing. Appl. Sci. 2021, 11, 563. [Google Scholar] [CrossRef]
- Nguyen, D.Q.; Gouttefarde, M.; Company, O.; Pierrot, F. On the analysis of large-dimension reconfigurable suspended cable-driven parallel robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 5728–5735. [Google Scholar]
- Barbazza, L.; Oscari, F.; Minto, S.; Rosati, G. Trajectory planning of a suspended cable driven parallel robot with reconfigurable end effector. Robot. Comput.-Int. Manuf. 2017, 48, 1–11. [Google Scholar] [CrossRef]
- Duan, Q.J.; Duan, X.C. Workspace classification and quantification calculations of cable-driven parallel robots. Adv. Mech. Eng. 2014, 6, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Ouyang, B.; Shang, W.W. Rapid optimization of tension distribution for cable-driven parallel manipulators with redundant cables. Chin. J. Mech. Eng. 2016, 29, 231–238. [Google Scholar] [CrossRef]
- Zhang, F.; Shang, W.W.; Zhang, B.; Cong, S. Design optimization of redundantly actuated cable-driven parallel robots for automated warehouse system. IEEE Access 2020, 8, 56867–56879. [Google Scholar] [CrossRef]
- Zhang, Z.; Liang, Y.Y.; Liu, H.W.; Wang, X.J. The research of optimal tension distribution methods based on typical trajectory. Mach. Des. Manuf. 2016, 4, 35–38, 43. [Google Scholar]
- Masone, C.; Bulthoff, H.H.; Stegagno, P. Cooperative transportation of a payload using quadrotors: A reconfigurable cable-driven parallel robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 1623–1630. [Google Scholar]
- Rasheed, T.; Long, P.; Marquez-Gamez, D.; Caro, S. Tension distribution algorithm for planar mobile cable-driven parallel robots. Mech. Mach. Sci. 2018, 53, 268–279. [Google Scholar]
- Anson, M.; Alamdari, A.; Krovi, V. Orientation workspace and stiffness optimization of cable-driven parallel manipulators with base mobility. J. Mech. Rob. 2017, 9, 031011. [Google Scholar] [CrossRef]
- Rasheed, T.; Long, P.; Caro, S. Wrench-feasible workspace of mobile cable-driven parallel robots. J. Mech. Rob. 2019, 12, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Tao, Y.; Zhang, S.Y.; Wang, Y.W. Research of tension distribution solution for redundantly constrained cable-driven parallel robots. Mech. Sci. Technol. Aerosp. Eng. 2021, 40, 344–349. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, C.; Yang, F.; Hou, Z.; Li, Y.; Li, H. Trajectory Planning of the Exit Point for a Cable-Driven Parallel Mechanism by Considering the Homogeneity of Tension Variation. Processes 2022, 10, 1544. https://doi.org/10.3390/pr10081544
Peng C, Yang F, Hou Z, Li Y, Li H. Trajectory Planning of the Exit Point for a Cable-Driven Parallel Mechanism by Considering the Homogeneity of Tension Variation. Processes. 2022; 10(8):1544. https://doi.org/10.3390/pr10081544
Chicago/Turabian StylePeng, Cheng, Fang Yang, Zequn Hou, Yanglong Li, and Hang Li. 2022. "Trajectory Planning of the Exit Point for a Cable-Driven Parallel Mechanism by Considering the Homogeneity of Tension Variation" Processes 10, no. 8: 1544. https://doi.org/10.3390/pr10081544
APA StylePeng, C., Yang, F., Hou, Z., Li, Y., & Li, H. (2022). Trajectory Planning of the Exit Point for a Cable-Driven Parallel Mechanism by Considering the Homogeneity of Tension Variation. Processes, 10(8), 1544. https://doi.org/10.3390/pr10081544