
Evaluation of the Forms of Education of High School Students Using a Hybrid Model Based on Various Optimization Methods and a Neural Network

 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
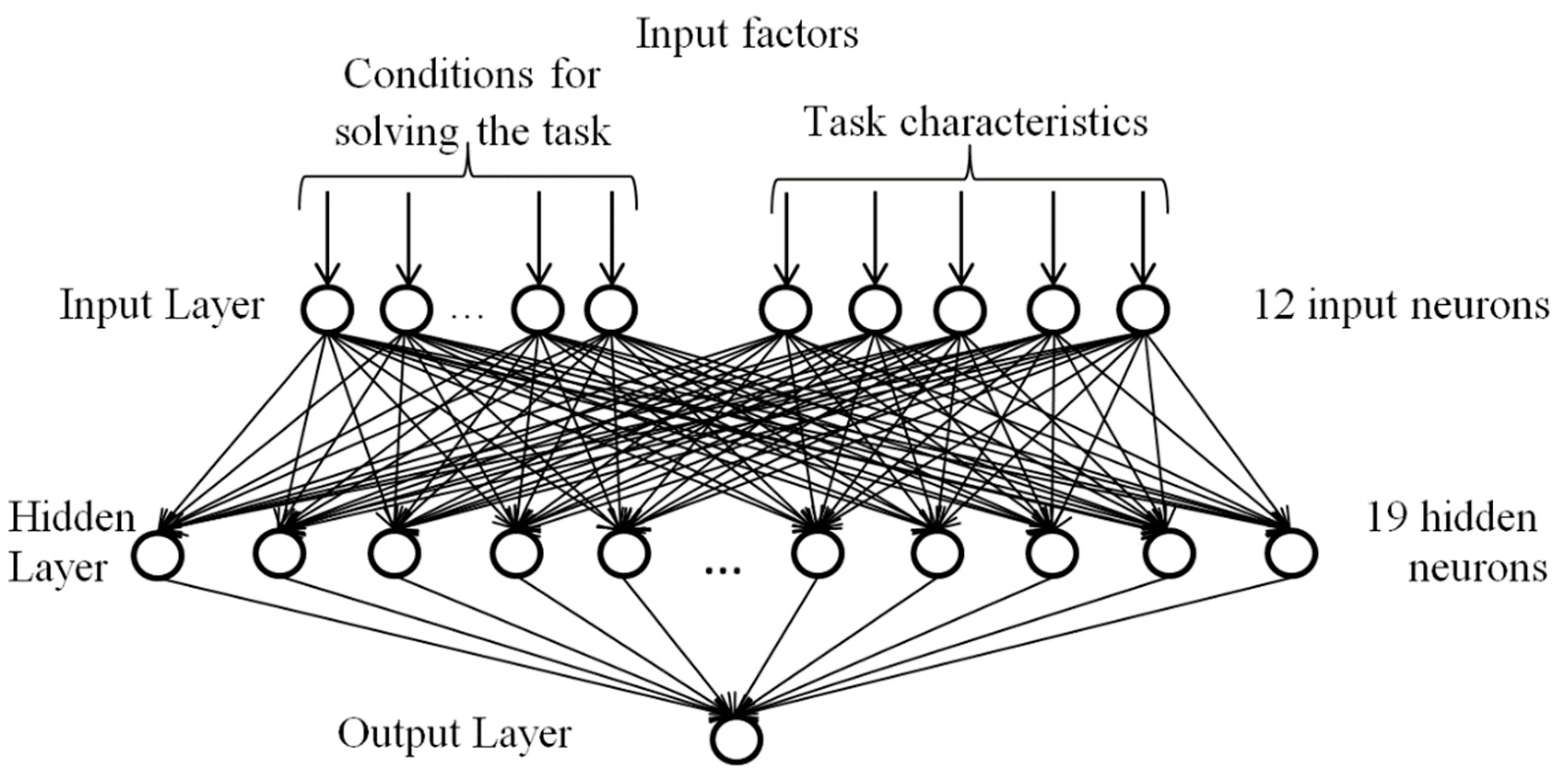
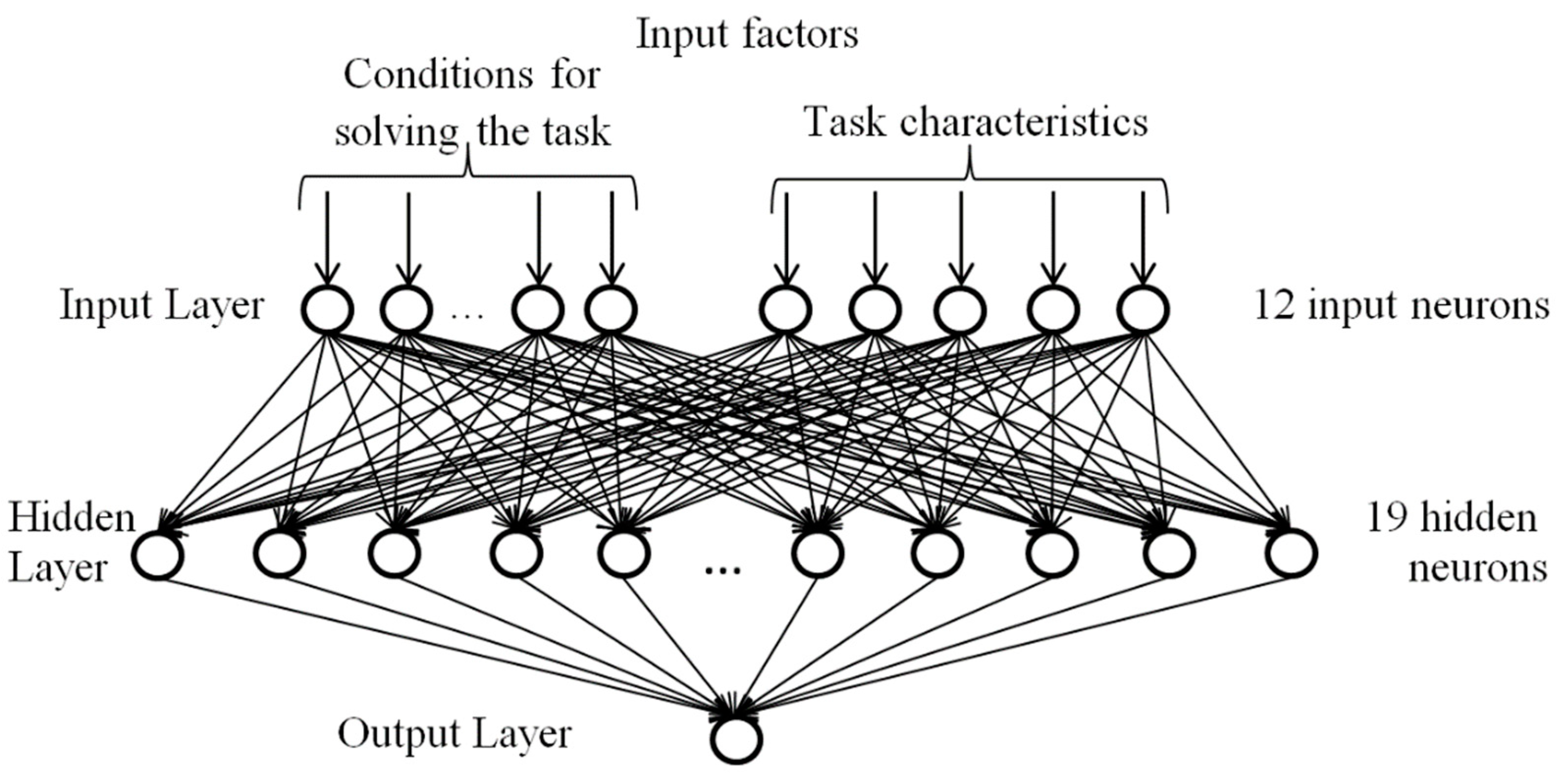
2.1. Neural Network to Measure Homework Performance
- Multilayer Perceptron (MLP) neural network trained by the Resilient Propagation method;
- Random Forest Algorithm.
- Number of topics the assignment deals with;
- Number of types of activities students use while doing the assignment;
- Number of questions in the assignment;
- Length of the assignment;
- Complexity in formulating the assignment;
- Age of a student;
- Sex of a student;
- Distance from home to school;
- Average math score;
- Average reading score;
- Learning mode;
- Family income.
- The number of topics covered by the assignment—this value is determined by lexemes specific to a particular topic. For example, the “electric current” lexeme means that the assignment has a topic related to electricity.
- The length of the assignment is the number of words required to formulate the assignment.
- The complexity of the assignment formulation is an expert value determined in scores in the range from 1 (the assignment is formulated clear and unambiguously) to 3 (there are redundant data and ambiguous formulations).
- The age of the school student is in years.
- Sex is a binary value.
- The distance from home to school is indicated in kilometers.
- The average math score is the average score in mathematics for the previous schooling period (transferred to a five-point system). Depending on the school, this is a quarter or trimester grade.
- The average score in reading is calculated for lower grades or in the national language for students of senior grades.
- Learning mode—binary value (distant—0 or in-class—1).
- Family income is a value determined in points from 1 (the family receives subsidies from the state) to 3 (the family can afford expenditures higher than average).
2.2. Optimization Algorithms for Solving Multicriteria Problems
- Generating initial population. Filling the population with individuals in which the array elements (bits) are filled randomly within the boundaries defined by the user.
- Determining algorithm parameters. The parameters are size of the population , the number of generations , the probability of crossover , and the probability of mutation , which determine for each population the number of pairs of crossing chromosomes and the number of mutating chromosomes.
- Generating initial population. The initial population can be randomly generated.
- Choosing a parental couple. The selection of the parent pair is carried out using the roulette method, that is, the proportional selection method. Chromosomes are displayed as a segment of lines or roulette sectors in such a way that their size is proportional to the value of the objective function. Next, we randomly generate numbers in the range from 0 to 1, and those individuals in whose segments the random numbers fall are selected as parents. In this case, the chromosome numbers of the parents must be different.
- Crossover. For a crossover, we pick a random point and choose chromosomes. After that, we use the single-point crossover.
- Mutation. The number of mutations is determined, and chromosomes for mutation are selected. A single-point mutation is carried out.
- Checking the condition for completing the evolution process. If the condition for the termination of the algorithm is not met, then go to Step 4; otherwise, go to Step 8. As a condition for the termination of the process, there can be a specified number of generations or a defined number of identical individuals.
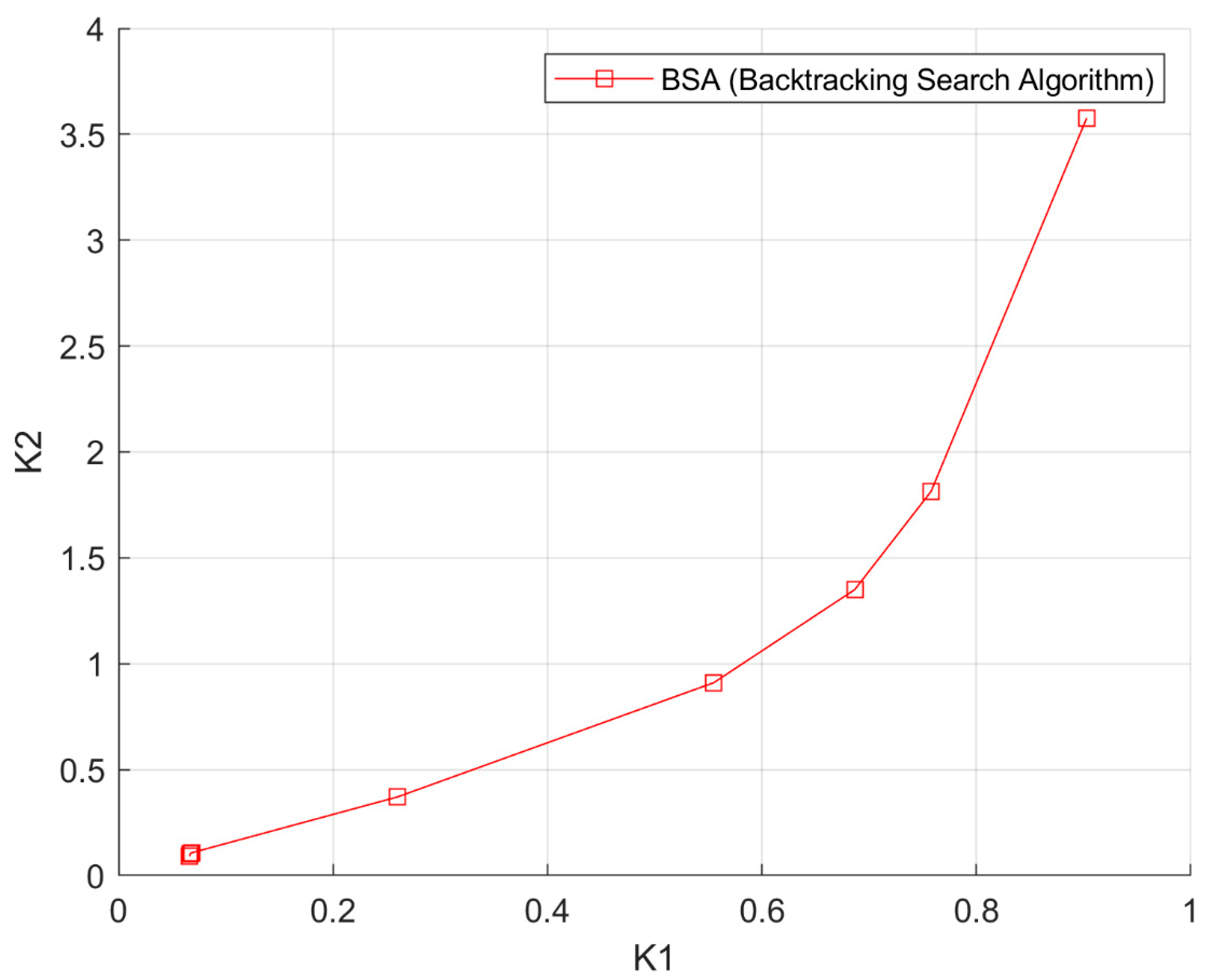
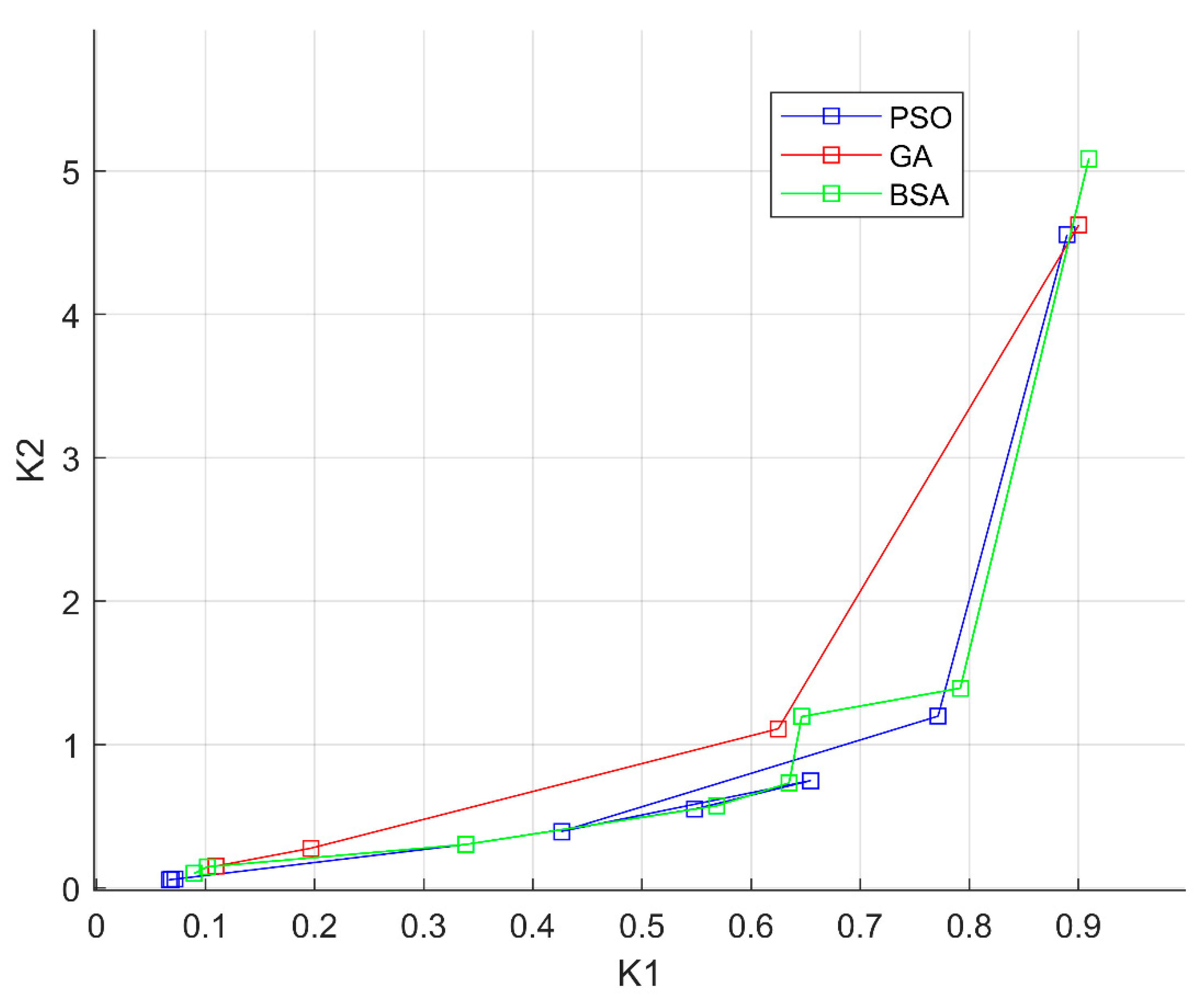
- Formation of a Pareto-optimal solution.
3. Results
- The average relative time for completing homework, taking into account the difficulty of a particular subject, is as follows:
- 2.
- Average relative efficiency of homework in terms of material assimilationwhere is the average time for completing homework (min) for one lesson; —the average efficiency of assignments in subjects assigned to the home; —maximum efficiency, —task efficiency coefficient obtained using a neural network, —number of tasks.
- Has the time you spend on your homework changed when you switched to distance learning?
- If changed, select by how much.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sanitary Rules SP 2.4.3648-20. Sanitary and Epidemiological Requirements for the Organization of Education and Training, Recreation and Health Improvement of Children and Youth; Approved by the Chief State Sanitary Doctor Russian Federation Dated 28 September 2020 N 28. Available online: https://docs.cntd.ru/document/566085656 (accessed on 1 June 2021).
- Wang, J. An International Comparative Study on Exercise Questions in Middle School Mathematics Textbooks. In School Mathematics Textbooks in China. Comparative Studies and Beyond; Wang, J., Ed.; East China Normal University Scientific Reports; World Scientific Publishing Co. Pte. Ltd.: Singapore, 2021; Chapter 10; Volume 2, pp. 347–373. [Google Scholar]
- Mohseny, M.; Zamani, Z.; Basti, S.A.; Sohrabi, M.-R.; Najafi, A.; Tajdini, F. Exposure to Cyberbullying, Cybervictimization, and Related Factors Among Junior High School Students. Iran. J. Psychiatry Behav. Sci. 2020, 14, e99357. [Google Scholar] [CrossRef]
- Masci, C.; Ieva, F.; Agasisti, T.; Paganoni, A.M. Evaluating class and school effects on the joint student achievements in different subjects: A bivariate semiparametric model with random coefficients. Comput. Stat. 2021, 11, 1–41. [Google Scholar] [CrossRef]
- Febriana, M.D.; Zainuddin, Z.; Nurtanio, I. School zoning system using K-Means algorithm for high school students in Makassar City. In Proceedings of the International Seminar on Research of Information Technology and Intelligent Systems (ISRITI) 2019, Yogyakarta, Indonesia, 5–6 December 2019; pp. 368–372. [Google Scholar] [CrossRef]
- Marcenaro-Gutierrez, O.D.; Gonzalez-Gallardo, S.; Luque, M. Evaluating the potential trade-off between students’ satisfaction and school performance using evolutionary multiobjective optimization. RAIRO Oper. Res. 2021, 55, S1051–S1067. [Google Scholar] [CrossRef] [Green Version]
- Shehab, T.; Haghighat, R.; Sajjan, K.K.; Balali., V. Prioritization of K-12 school maintenance construction projects using genetic algorithm and dynamic programming models. J. Inf. Technol. Constr. 2021, 26, 112–127. [Google Scholar] [CrossRef]
- Shukhman, A.E.; Bolodurina, I.P.; Polezhaev, P.N.; Ushakov, Y.A.; Legashev, L.V. Adaptive technology to support talented secondary school students with the educational IT infrastructure. In Proceedings of the IEEE Global Engineering Education Conference (EDUCON), Santa Cruz de Tenerife, Spain, 18–20 April 2018; pp. 993–998. [Google Scholar] [CrossRef]
- Petrosov, D.A.; Lomazov, V.A.; Petrosova, N.V. Model of an Artificial Neural Network for Solving the Problem of Controlling a Genetic Algorithm Using the Mathematical Apparatus of the Theory of Petri Nets. Appl. Sci. 2021, 11, 3899. [Google Scholar] [CrossRef]
- Khasanshin, I. Application of an artificial neural network to automate the measurement of kinematic characteristics of punches in boxing. Appl. Sci. 2021, 11, 1223. [Google Scholar] [CrossRef]
- Ivanyuk, V.A.; Pashchenko, F.F. Neural networks and their application in forecasting problems. J. Phys. Conf. 2020, 1703, 012033. [Google Scholar] [CrossRef]
- Makarov, M.A.; Obidin, V.V.; Osipov, A.V.; Filimonov, A.V. Neural Excel VBA Extension Pack: Certificate of State Registration of Computer Programs. Available online: https://new.fips.ru/registers-doc-view/fips_servlet?DB=EVM&DocNumber=2019617073&TypeFile=html (accessed on 1 June 2021).
- Dogadina, E.P.; Smirnov, M.V.; Osipov, A.V.; Suvorov, S.V. Formation of the Optimal Load of High School Students Using a Genetic Algorithm and a Neural Network. Appl. Sci. 2021, 11, 5263. [Google Scholar] [CrossRef]
- Amjad, M.K.; Butt, S.I.; Kousar, R.; Ahmad, R.; Agha, M.H.; Faping, Z.; Anjum, N.; Asgher, U. Recent Research Trends in Genetic Algorithm Based Flexible Job Shop Scheduling Problems. Math. Probl. Eng. 2018, 2018, 9270802. [Google Scholar] [CrossRef] [Green Version]
- Viana, M.S.; Junior, O.M.; Contreras, R.C. A Modified Genetic Algorithm with Local Search Strategies and Multi-Crossover Operator for Job Shop Scheduling Problem. Sensors 2020, 20, 5440. [Google Scholar] [CrossRef] [PubMed]
- Rarità, L.; Stamova, I.; Tomasiello, S. Numerical schemes and genetic algorithms for the optimal control of a continuous model of supply chains. Appl. Math. Comput. 2021, 388, 125464. [Google Scholar] [CrossRef]
- Hu, Y.; Li, J.; Hong, M.; Liu, M.; Man, Y. Short term electric load forecasting model and its verification for process industrial enterprises based on hybrid GA-PSO-BPNN algorithm—A case study of papermaking process. Energy 2019, 170, 1215–1227. [Google Scholar] [CrossRef]
- Sedak, M.; Rosić, B. Multi-Objective Optimization of Planetary Gearbox with Adaptive Hybrid Particle Swarm Differential Evolution Algorithm. Appl. Sci. 2021, 11, 1107. [Google Scholar] [CrossRef]
- Wang, L.; Peng, L.; Wang, S.; Liu, S. Advanced backtracking search optimization algorithm for a new joint replenishment problem under trade credit with grouping constraint. Appl. Soft Comput. 2020, 86, 105953. [Google Scholar] [CrossRef]
- Park, K.; Shin, D.; Chi, S. Variable Chromosome Genetic Algorithm for Structure Learning in Neural Networks to Imitate Human Brain. Appl. Sci. 2019, 9, 3176. [Google Scholar] [CrossRef] [Green Version]
- Yerznkyan, B.; Bychkova, S.; Gataullin, T.; Gataullin, S. The sufficiency principle as the ideas quintessence of the club of Rome. Montenegrin J. Econ. 2019, 15, 21–29. [Google Scholar] [CrossRef]
- Korchagin, S.; Serdechny, D.; Kim, R.; Terin, D.; Bey, M. The use of machine learning methods in the diagnosis of diseases of crops. E3S Web Conf. EPD Sci. 2020, 176, 04011. [Google Scholar] [CrossRef]
- Dogadina, E.P.; Konoplev, A.N.; Belov, A.A.; Kropotov, Y.A.; Proskuryakov, A.Y. Automated Control Systems for Industrial Production. Available online: https://www.directmedia.ru/book_454164_avtomatizirovannyie_sistemyi_upravleniya_promyishlennyimi_proizvodstvami/ (accessed on 15 July 2021).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.0 | 0.0682 | 0.0943 | 0.9869 |
| 0.1 | 0.0688 | 0.0951 | 0.9721 |
| 0.2 | 0.0670 | 0.0927 | 0.9867 |
| 0.3 | 0.0680 | 0.0941 | 0.9731 |
| 0.4 | 0.0676 | 0.0934 | 0.9798 |
| 0.5 | 0.0679 | 0.0939 | 0.9749 |
| 0.6 | 0.2570 | 0.3661 | 0.25 |
| 0.7 | 0.4869 | 0.7573 | 0.1209 |
| 0.8 | 0.4544 | 0.6933 | 0.1477 |
| 0.9 | 0.7296 | 1.5957 | 0.0574 |
| 1.0 | 0.8406 | 3.3763 | 0.0271 |
| 0.0 | 0.0673 | 0.0932 | 0.9979 |
| 0.1 | 0.0678 | 0.0935 | 0.9979 |
| 0.2 | 0.0678 | 0.0935 | 0.9979 |
| 0.3 | 0.0682 | 0.0946 | 0.9912 |
| 0.4 | 0.0685 | 0.0998 | 0.9785 |
| 0.5 | 0.0809 | 0.0940 | 0.9749 |
| 0.6 | 0.2620 | 0.3719 | 0.2468 |
| 0.7 | 0.4950 | 0.8591 | 0.1209 |
| 0.8 | 0.5896 | 1.0150 | 0.1002 |
| 0.9 | 0.7498 | 1.7080 | 0.0536 |
| 1.0 | 0.8900 | 3.5012 | 0.0105 |
| 0.0 | 0.0663 | 0.0917 | 0.9988 |
| 0.1 | 0.0663 | 0.0917 | 0.9988 |
| 0.2 | 0.0663 | 0.0917 | 0.9988 |
| 0.3 | 0.0663 | 0.0917 | 0.9988 |
| 0.4 | 0.0668 | 0.1020 | 0.8975 |
| 0.5 | 0.0679 | 0.1070 | 0.8790 |
| 0.6 | 0.2600 | 0.3709 | 0.2468 |
| 0.7 | 0.5550 | 0.9103 | 0.1005 |
| 0.8 | 0.6866 | 1.3500 | 0.0677 |
| 0.9 | 0.7578 | 1.8140 | 0.0504 |
| 1.0 | 0.9030 | 3.5776 | 0.0255 |
| Function | Indicators | PSO | BSA | GA |
|---|---|---|---|---|
| efficiency | 100% | 100% | 100% | |
| number of iterations | 523.4 | 492.1 | 483.1 | |
| solution time | 0.311 | 0.707 | 0.309 | |
| efficiency | 100% | 100% | 100% | |
| number of iterations | 591.2 | 527.7 | 497.8 | |
| solution time | 0.408 | 0.785 | 0.3906 | |
| efficiency | 90.1% | 100% | 100% | |
| number of iterations | 754.5 | 692.7 | 684.4 | |
| solution time | 0.634 | 0.867 | 0.631 | |
| efficiency | 92.5% | 100% | 100% | |
| number of iterations | 712.9 | 647.0 | 640.0 | |
| solution time | 0.612 | 0.823 | 0.5906 | |
| efficiency | 95.7% | 100% | 100% | |
| Average value | number of iterations | 645.4 | 589.8 | 576.3 |
| solution time | 0.491 | 0.795 | 0.481 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dogadina, E.P.; Smirnov, M.V.; Osipov, A.V.; Suvorov, S.V. Evaluation of the Forms of Education of High School Students Using a Hybrid Model Based on Various Optimization Methods and a Neural Network. Informatics 2021, 8, 46. https://doi.org/10.3390/informatics8030046
Dogadina EP, Smirnov MV, Osipov AV, Suvorov SV. Evaluation of the Forms of Education of High School Students Using a Hybrid Model Based on Various Optimization Methods and a Neural Network. Informatics. 2021; 8(3):46. https://doi.org/10.3390/informatics8030046
Chicago/Turabian StyleDogadina, Elena Petrovna, Michael Viktorovich Smirnov, Aleksey Viktorovich Osipov, and Stanislav Vadimovich Suvorov. 2021. "Evaluation of the Forms of Education of High School Students Using a Hybrid Model Based on Various Optimization Methods and a Neural Network" Informatics 8, no. 3: 46. https://doi.org/10.3390/informatics8030046
APA StyleDogadina, E. P., Smirnov, M. V., Osipov, A. V., & Suvorov, S. V. (2021). Evaluation of the Forms of Education of High School Students Using a Hybrid Model Based on Various Optimization Methods and a Neural Network. Informatics, 8(3), 46. https://doi.org/10.3390/informatics8030046