2.2. Barrier Method
For the construction of optimal dividend strategies the barrier method has been used for time and state discrete models in
Hipp (
2018). There, an increasing sequence of barriers had been selected at which dividends are paid, and the dividend value as well as th corresponding ruin probability were computed. We adjust this for the continuous Lundberg model and use an optimal selection of barriers which is based on the Lagrange multiplier method.
The two fundamental ingredients for the Lundberg model are the survival probability
which satisfies
for
and the equation
as well as the scale function
which is the unique solution of the equation
satisfying
and
We also consider the functions
and
With formulas (
11) and (
12) these can be computed as
Many ruin related quantities can be expressed via
, and most dividend values are connected with
Examples are first entry probabilities (before ruin) and discount factors corresponding to the time of first entry (see
Hipp (
2018)). So, e.g., the functions
and
are given by
The Equations (
11) and (
12) have solutions with continuous first derivative when the claim size distribution is non-atomic. All solutions of (
11) vanishing for
are proportional. The same is true for Equation (
12).
Fix an initial surplus
and an allowed ruin probability
with
We first define the running ruin probabilities introduced in
Hipp (
2017) for a dividend strategy
D which is defined via a finite non-decreasing sequence
: whenever we reach
all incoming premia are paid out as dividends until the next claim happens. When the surplus reaches
we pay out all premia as dividends until the next claim happens, and then we stop dividend payment forever. For
the ruin probability
of the (with dividend) risk process
is proportional to
, and
implies that it can be written as
These
running allowed ruin probabilities had been introduced in
Hipp (
2018) for a discrete model. Let
be one of the barrier levels at which all premia are paid out as dividends. Then the corresponding running ruin probability
after hitting
has the form
We leave level
at the first claim during dividend payment. The ruin probability
after leaving the level
and before hitting
is also of the above form with
derived from
or
The ruin probability
for the with dividend process
satisfies
whenever
Lemma 1. For fixed surplus 0 and allowed ruin probability 0 1 let be an infinite sequence with Assume that the corresponding factors converge to 1. Then where D is the dividend strategy which pays dividends on the barrier levels
Proof. The survival probability
is the probability that from surplus
s we reach
after leaving
at a claim we reach
and so on. For
let
be the probability that the without dividend process
starting at
x will reach
B before ruin. Then
The events
that after dividend payment at
the surplus will reach
are independent and have probability
The event
that
starting at
s will reach
has probability
For
we have
and so we obtain the survival probability
☐
With a finite sequence
we represent a dividend strategy in which dividend payment is stopped forever when the surplus leaves
i.e.,
and
The survival probability after reaching
equals
For this strategy we obtain the survival probability
The present value of dividends paid on a barrier
does not depend on
it is
This dividend value is discounted to the time at which
is visited first. The discount factor for the time spent at barrier level
equals
The discount factor for the time between leaving
and hitting
equals
The dividend value for a strategy
D with barriers
satisfying
is given by
where
and
The present value of dividends paid at level
equals
The present value for dividends paid at level
equals
and the next barrier level contributes
and so on. For equal barriers
we easily obtain that for
and with
which is the well known correct value (compare with
Renaud and Zhou (
2007)).
We first consider dividend strategies which have only one barrier B at which dividends are paid a finite number of times. This means that barriers are paid at and after paying dividends on barrier level times we stop paying dividends forever. The barrier B can be chosen such that the allowed ruin probability is exact, and the corresponding dividend value can be given explicitly.
Lemma 2. For any given pair with and we can find B such that the above dividend strategy yields the with dividend ruin probability The corresponding dividend value is Proof. The with dividend survival probability is
which equals
whenever
so the appropriate choice for
B is the solution of
Equation (
21) follows from (
18)–(
20). ☐
These one barrier strategies are clearly suboptimal: the dividend value converges to zero when since the corresponding barriers converge to infinity. However, for moderate values of K the corresponding dividend values are surprisingly good. These can be used for barrier strategies for the tail of a finite barrier sequence we choose K large enough such that the barrier B corresponding to and K is larger than and then the sequence of barriers in which is followed by K values of B has the exact allowed ruin probability. The same method applies to the choice of if then we can decrease to get an exact allowed ruin probability (and a slightly larger dividend value).
A manual search for good sequences of barrier sequences is tedious: we used
linear sequences of the form
sequences satisfying the recursion
barriers with small n which are selected manually.
Linear sequences produce dividend values which are almost optimal, and sequences from recursion (
24) can do even better, but are still suboptimal. We come close to optimal results when, for large
we maximize the dividend value
using the Lagrange multiplier method. The problem has a high dimension, but using the structure of the function
G we could find some simplifications. As a first step, we look at a related but simpler problem.
Problem: For and a smooth increasing function maximize the functionunder the constraintWe start with the Lagrange system of equationsFor we getwhich leads to the recursive relationsFor the calculation of we would need that is monotone. In our control problem we want to maximize the following term by the choice of barriers
with
and
As in the above problem, we fix
and use the Lagrange equations with a multiplier
L and
With
we get a formula for
Our function
allows for the following simplification: for
the barrier
solves
Here, we first omit the factor
and all terms in which
does not occur, then we divide both sides by
Equation (
27) can be solved easily and quickly using Newton or the false position (regula falsi) method.
Some care is needed since the method has some uncommon features: We start with the last barrier which has practically no impact on the value of the company or the ruin probability, but in the recursion it determines all barriers. If we increase a large N by 1, then the company value as well as the corresponding ruin probability will change a lot, since we add a new first barrier which has a major impact on both numbers. Finally, we want to maximize under the constraint Nevertheless, the method is stable and accurate, even with the numerical precision of MatLab, and it produces admissible solutions. For we obtain and
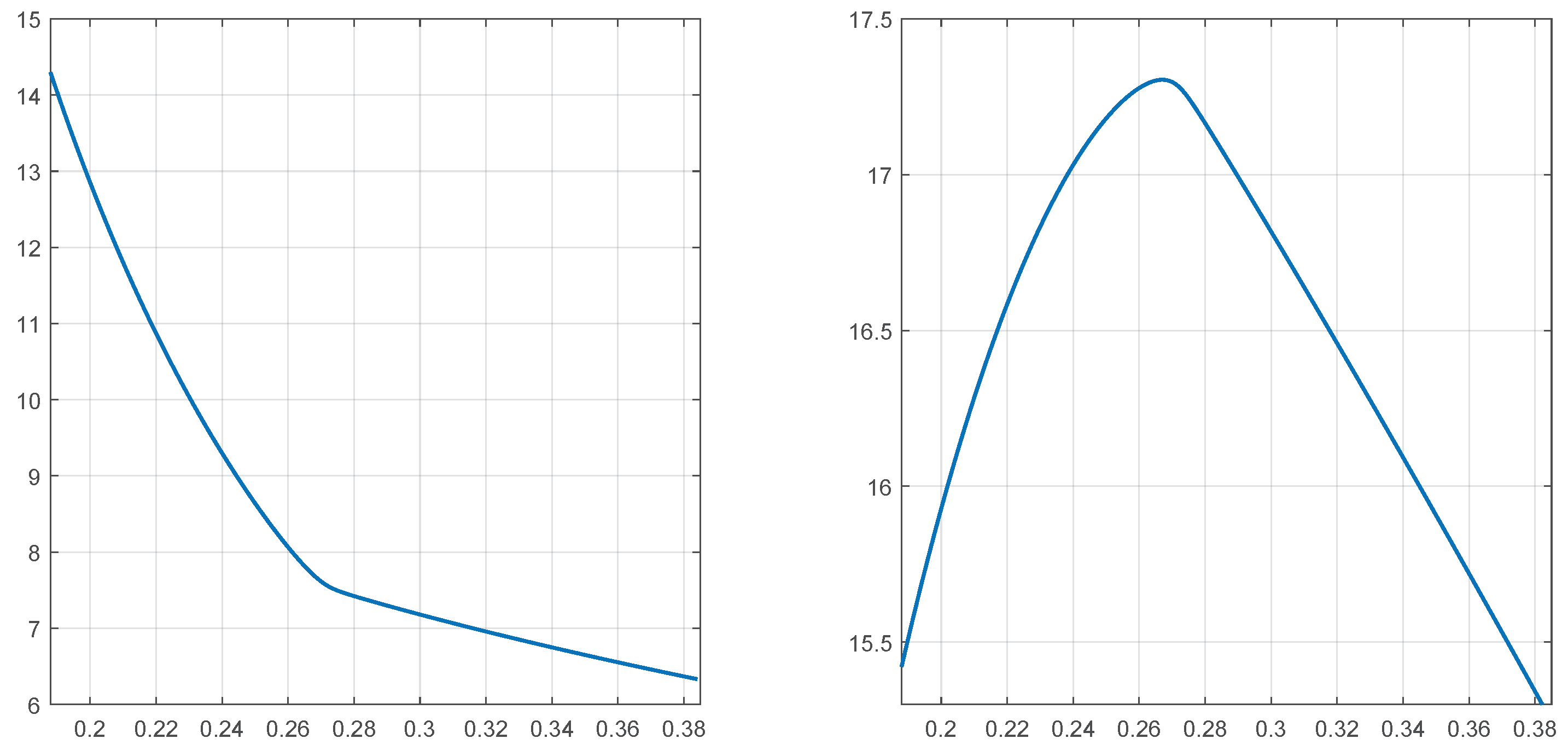
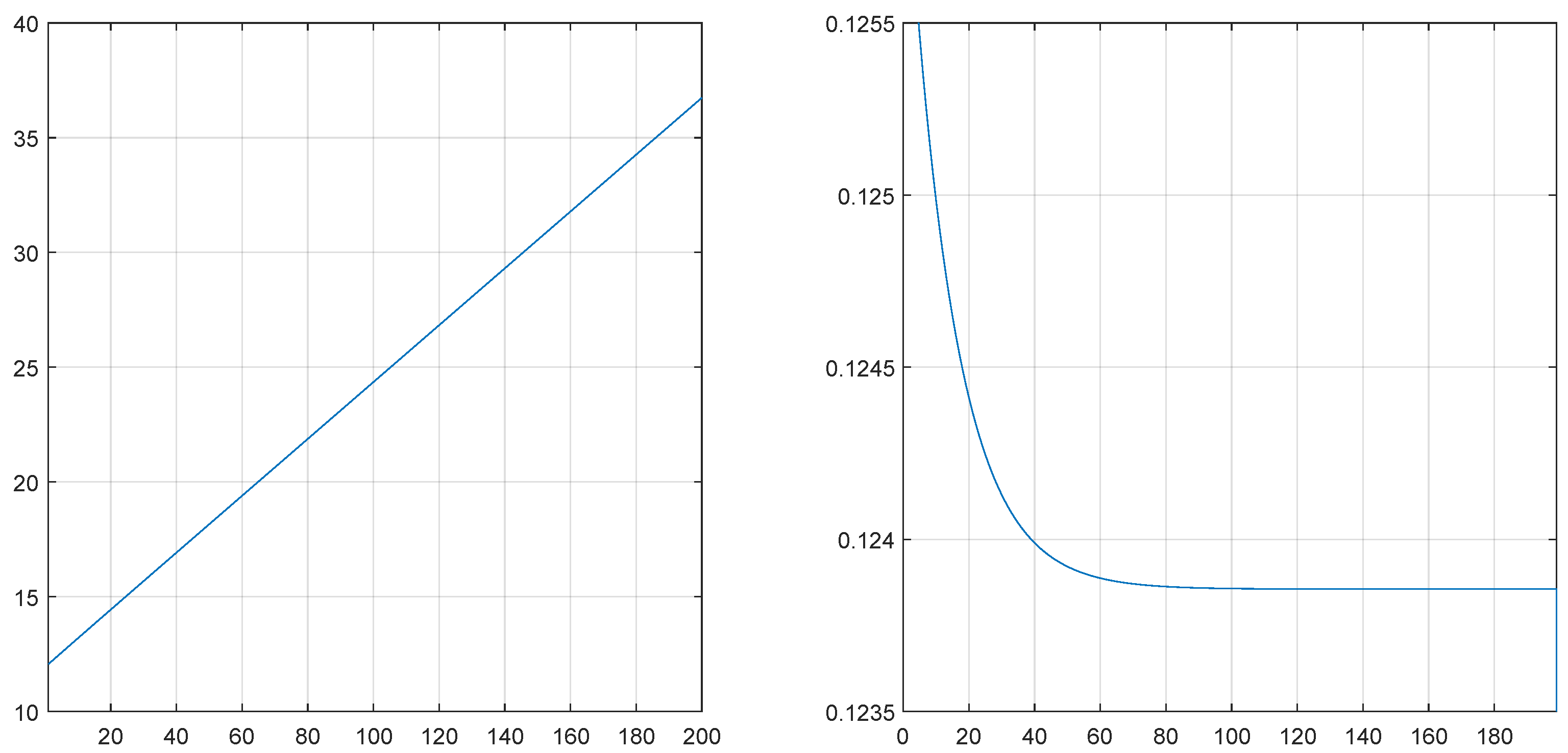
A plot of the resulting optimal barriers
in
Figure 2 explains the good performance of linear sequences: the optimal sequences
are not linear but almost linear.
Figure 2 left and right shows the optimal sequences and their increments in the example considered below.
In dividend control problems, optimal strategies can often be characterized by a single barrier function
which identifies the optimal barriers for arbitrary initial surplus
s and allowed ruin probability
we start paying dividends whenever the with dividend process
and the allowed running ruin probability
hit
i.e., when
Notice that the optimal sequences
and the corresponding running ruin probabilities
are points on the curve
i.e.,
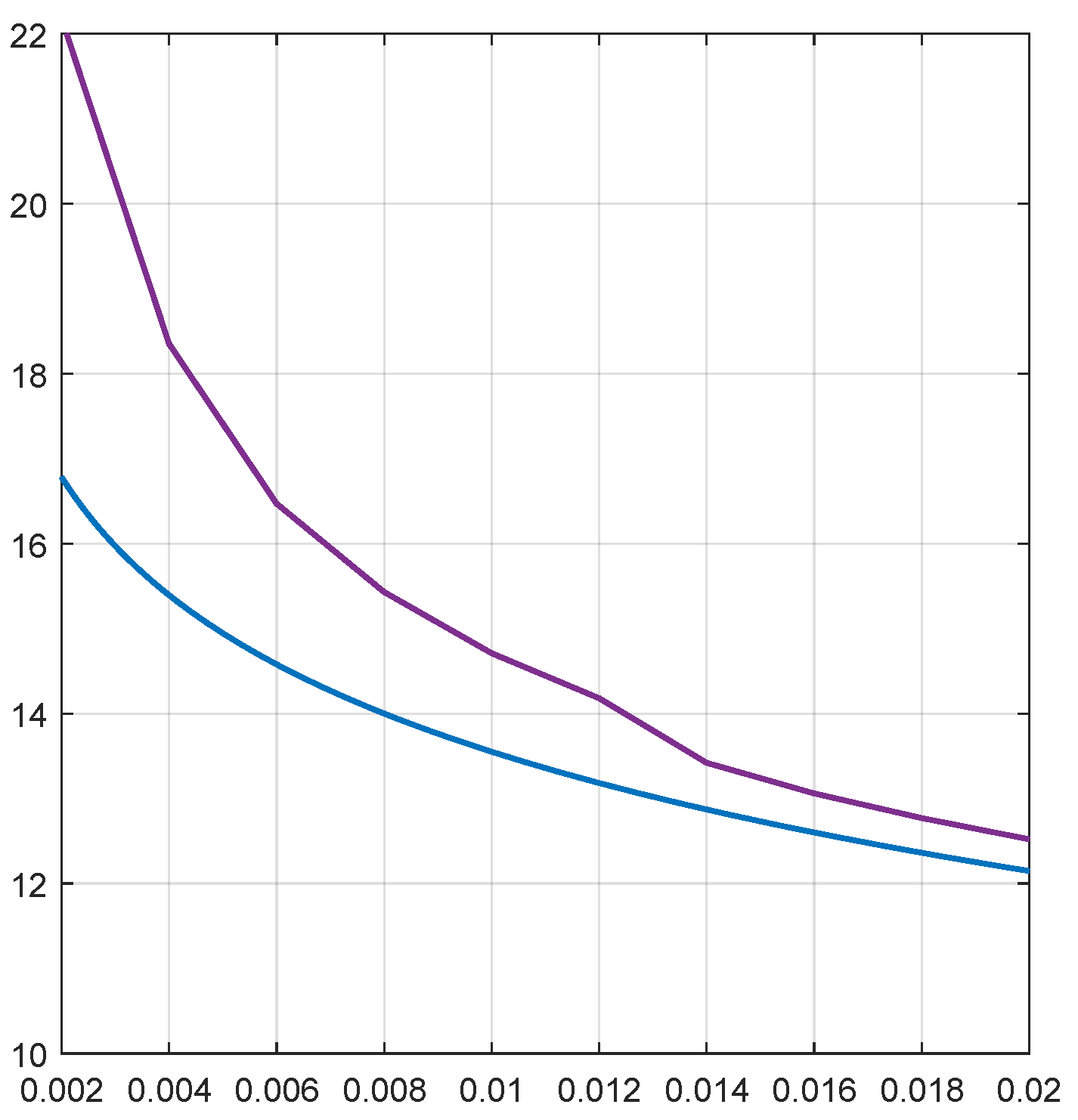
Figure 3 shows the function
at the points
at which
as well as the corresponding curve for the iteration method with
The curves should coincide; however, the second curve shows edges and higher values which are due to the discretization of s and The curves are plotted for only because of
2.3. Reinsurance Control for Company Value with Ruin Constraint
Many problems in stochastic control are solved via the well known Hamilton-Jacobi-Bellman equation. It is written for the value function of the given control problem reflecting the dynamics of the underlying stochastic model and the influence of control variables on these dynamics.
The case of a company value
without ruin constraint is easy. We have a set of possible reinsurance contracts
which describe the risk sharing at a claim of size
X between insurer (paying
) and reinsurer (paying
), and we have a reinsurance premium
for contract
Then the Hamilton-Jacobi-Bellman equation for the candidate solution
satisfying
reads
The optimal dividend strategy is of barrier type if
is decreasing in
and increasing in
and in this case
B is the barrier. We let
when
while
for
On the no action region
we can restrict the possible reinsurance contracts to
and then
The optimal reinsurance strategy in the no action region is given by the minimizer
in (
31). This approach solves our control problem: Equation (
30) is homogeneous, the set of solutions has dimension 1, and the optimal reinsurance strategy is unique. Furthermore, from (
30) we get an iteration producing a non-decreasing sequence of functions converging to
. For reinsurance control to minimize the ruin probability—which uses quite similar techniques—see
Hipp and Vogt (
2003) as well as
Dickson and Waters (
2006).
The situation of a company value with ruin constraint is more complex. We can simplify the problem by fixing a sequence of barriers
on which dividends are paid, and use the running ruin probability
valid for
after visiting the barriers
Then the function
satisfies Equation (
30) above. This implies that the optimal reinsurance strategy for maximizing the company value with ruin constraint equals
for
i.e., the same strategy as without ruin constraint, as long as we are in the no action region. This holds generally when we are not on a barrier level, no matter how many barriers we have visited. With the Markov property we get a constant value for the reinsurance parameter on each single barrier. If the barriers and these parameters
are fixed, then we can compute the corresponding dividend value with formula (
20), where
is replaced by the candidate solution of
In addition, the ruin probabilities
for the no action regions are computed under the optimal reinsurance strategy:
The reinsurance strategies valid on the barriers were specified manually. Our first guess was for which we would not have a jump in the optimal reinsurance strategy when reaching However, in our numerical experiments we found that an optimal strategy uses more reinsurance during dividend payment. This is surprising since this at the same time reduces dividend payment.
In our numerical example we use these tools to manually construct a solution via the choice of a barrier sequence
and contract parameters
on these barriers. The corresponding dividend strategy pays the dividend rate
on the barrier
and the running ruin probabilities
are concatenated via






{kind=link}
{kind=link}
{kind=link}
{kind=link}