
Application of Basic Graph Theory in Autonomous Motion of Robots


Abstract
1. Introduction
2. Methodology
2.1. Aims
2.2. Theoretical Background
- Rule T1:
- Each edge can be passed only once in a single direction (if a labyrinth is without an exit, then exactly once).
- Rule T2:
- Rule T3:
2.3. Research Questions
2.4. Research Tools and Sample
2.5. Course Implementation
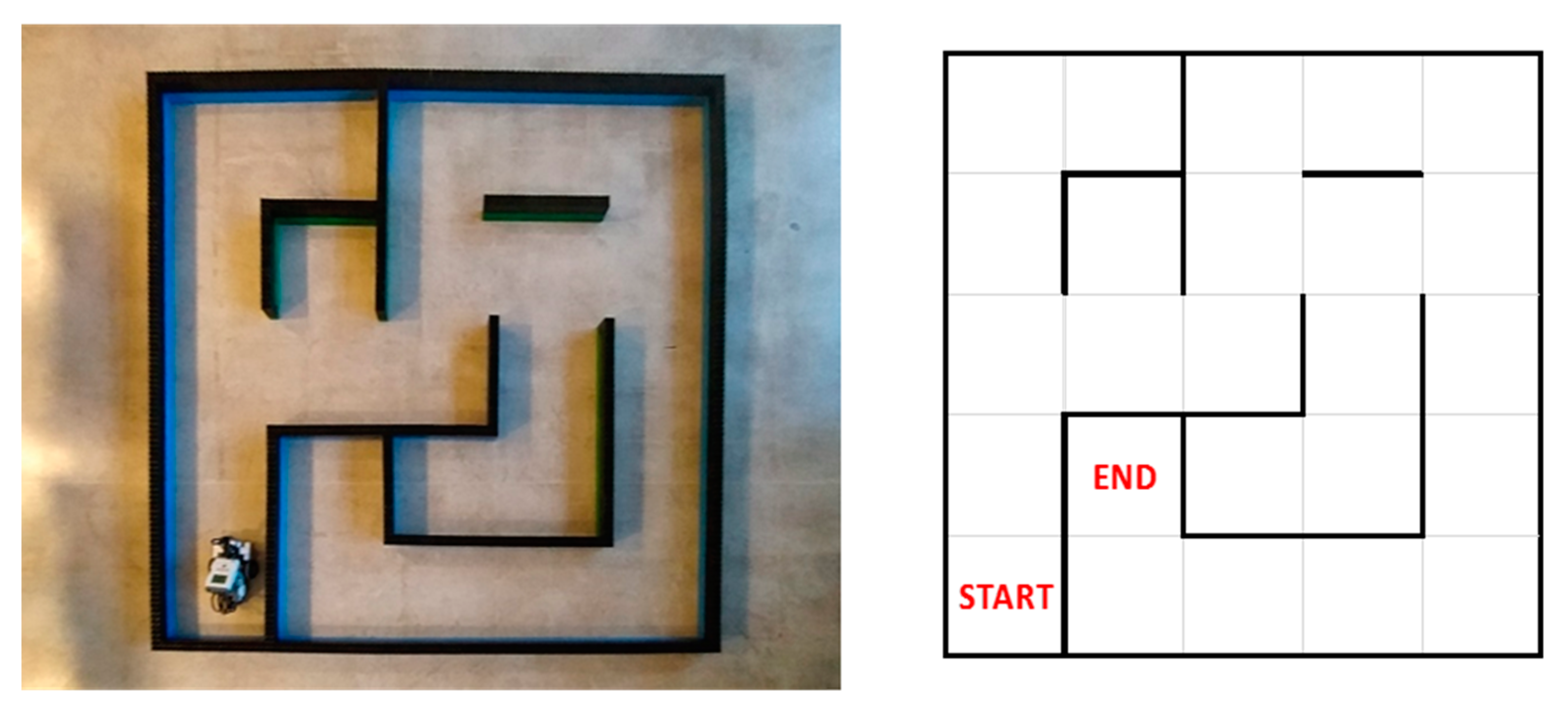
2.6. Maze Design
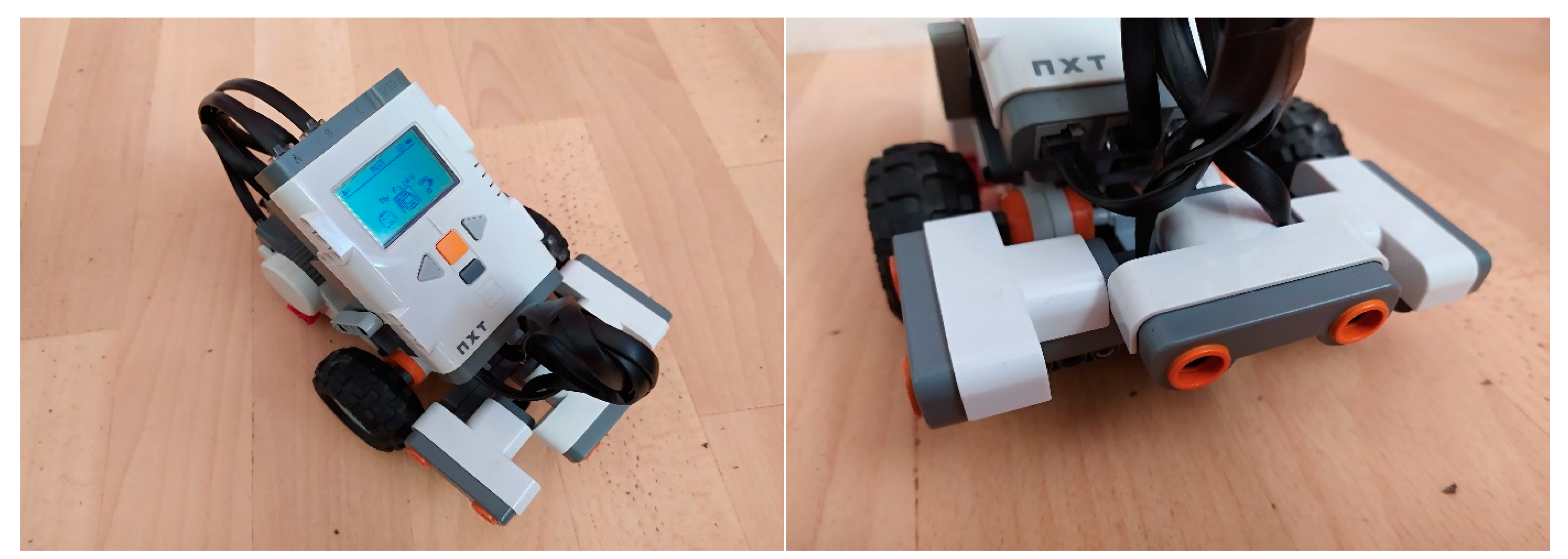
2.7. Construction of the Robot
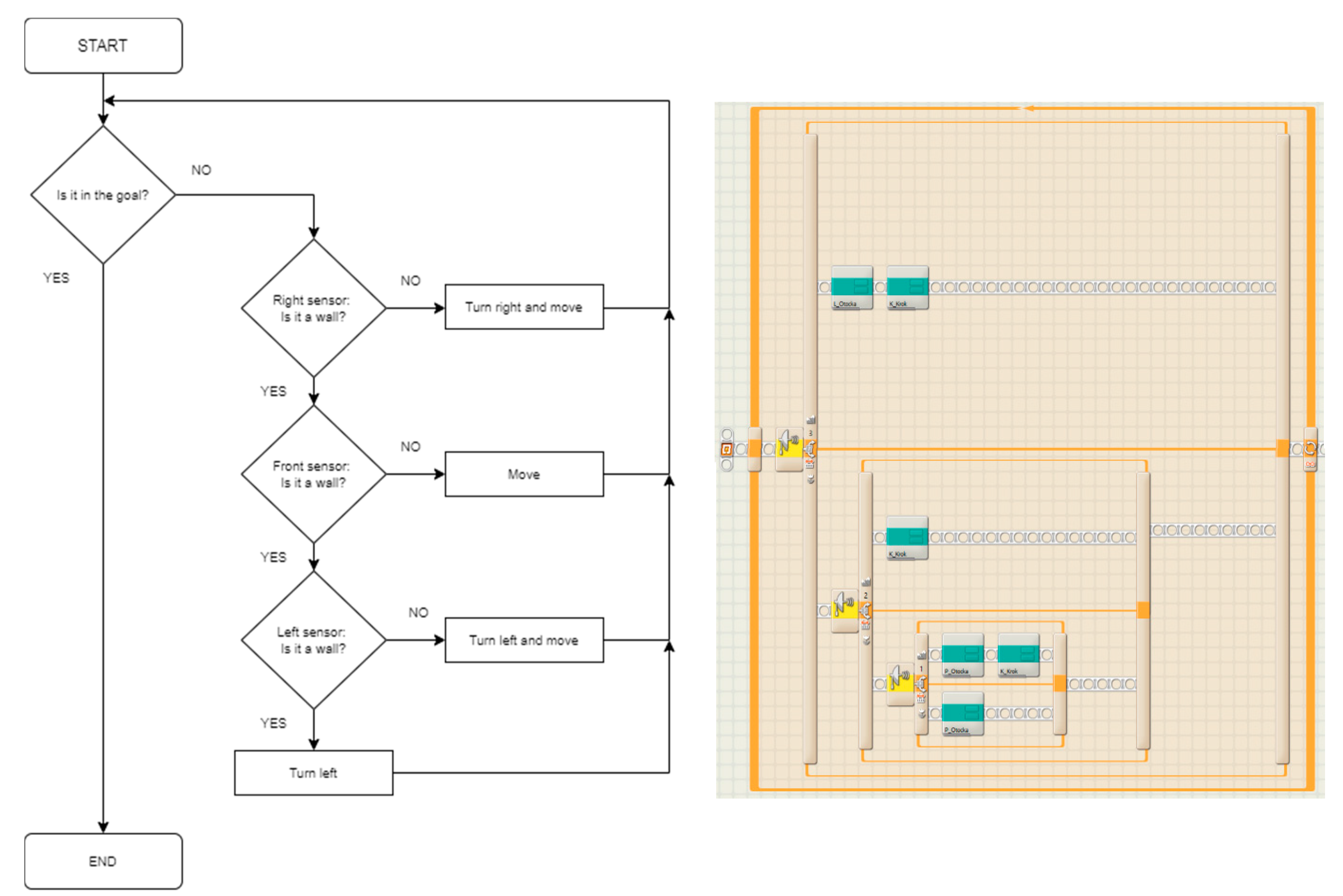
2.8. Programming the Robot
2.9. Selection of Algorithms
2.10. Comparison of Selected Algorithms for Solving the Robot Passing through a Labyrinth
2.10.1. Initial Conditions
2.10.2. Realization
2.10.3. Results
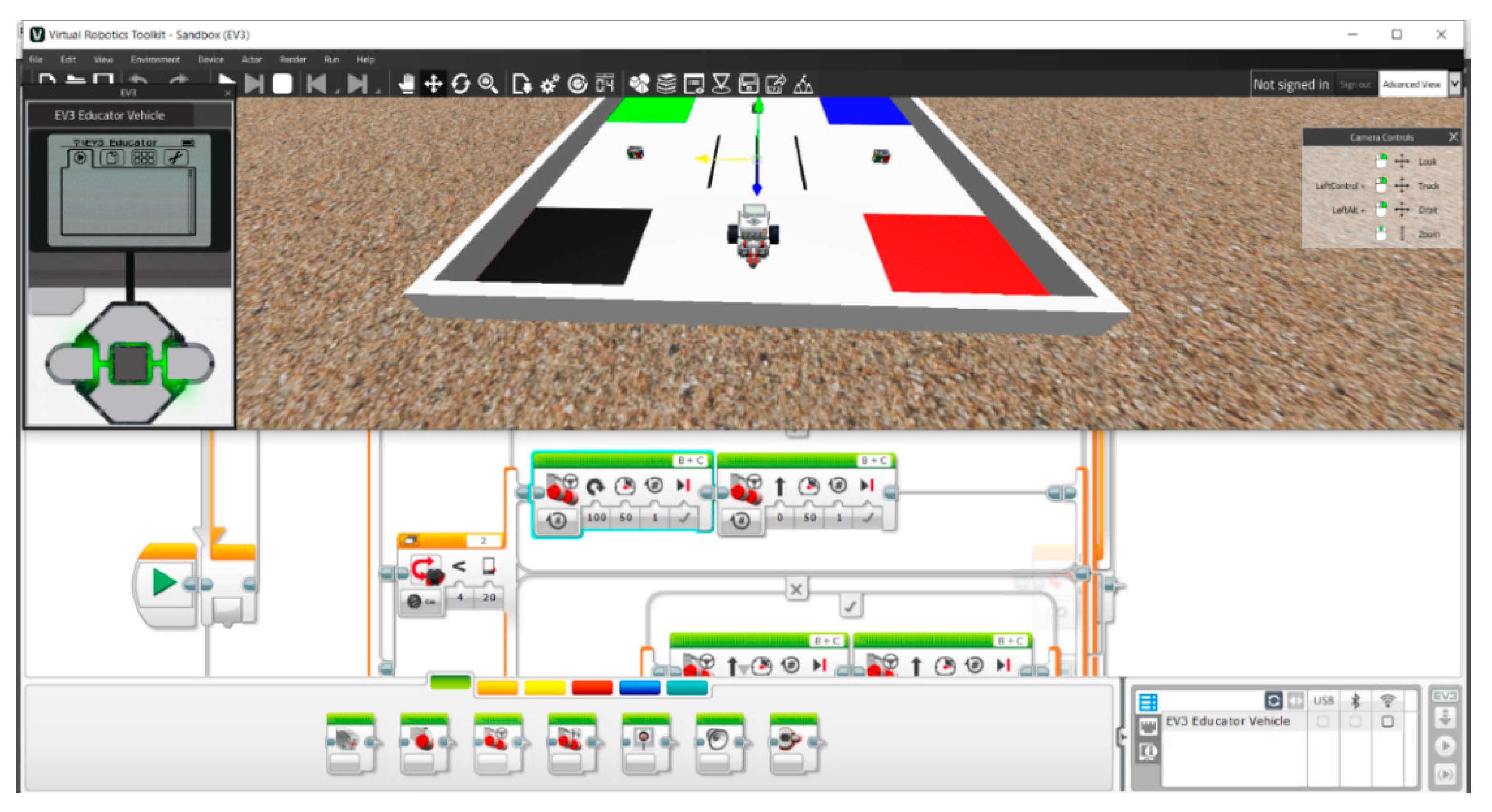
2.11. Virtual Environment
3. Research
3.1. Study Results
3.2. Research Question
3.3. Next Steps
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Biggs, N.L.; Lloyd, E.K.; Wilson, R.J. Graph Theory 1736–1936; Oxford University Press: Oxford, UK, 2006. [Google Scholar]
- Kern, H. Through the Labyrinth: Designs and Meanings over 5000 Years; Prestel: Munich, Germany, 2000. [Google Scholar]
- Okhotin, A. Graph-Walking Automata: From Whence They Come, and Whither They are Bound. In Implementation and Application of Automata; Lecture Notes in Computer Science; Hospodár, M., Jirásková, G., Eds.; Springer: Cham, Switzerland, 2019; Volume 11601. [Google Scholar]
- Lucas, E. Récréations Mathématiques; Gauthier-Villars et fils: Paris, France, 1882; pp. 41–55. [Google Scholar]
- Tarry, G. Le problème des labyrinthes. Nouv. Ann. Math. 1895, 14, 187–190. [Google Scholar]
- Edmonds, J.; Johnson, E.L. Matching, Euler tours and the Chinese postman. Math. Program. 1973, 5, 88–124. [Google Scholar] [CrossRef]
- Fleischner, H. Algorithms in Graph Theory; TU Wien, Database and Artificial Intelligence Group: Wien, Austria, 2016; pp. 37–42. [Google Scholar]
- Pullen, W. Think Labyrinth: Maze Algorithms. Available online: http://www.astrolog.org/labyrnth/algrithm.htm (accessed on 20 September 2020).
- Kilpatrick, W.H. The project method. Teach. Coll. Rec. 1918, 19, 319–335. [Google Scholar]
- Dewey, J. Experience and Education; Macmillan: New York, NY, USA, 1938. [Google Scholar]
- Dominguez, C.; Jaime, A. Database design learning: A project-based approach organized through a course management system. Comput. Educ. 2010, 55, 1312–1320. [Google Scholar] [CrossRef]
- Nguyen, T.P.L.; Nguyen, T.H.; Tran, T.K. STEM Education in Secondary Schools: Teachers’ Perspective towards Sustainable Development. Sustainability 2020, 12, 8865. [Google Scholar] [CrossRef]
- Rocker, Y.S.; Shwartz, A.D.; Schohet, M.; Dori, Y.J. The Effect of the FIRST Robotics Program on Its Graduates. Robotics 2020, 9, 84. [Google Scholar] [CrossRef]
- Jumaat, N.F.; Tasir, Z.; Halim, N.D.A.; Ashari, Z.M. Project-Based Learning from Constructivism Point of View. Adv. Sci. Lett. 2017, 23, 7904–7906. [Google Scholar] [CrossRef]
- Zheng, J.; Xing, W.; Zhu, G.; Chen, G.; Zhao, H.; Xie, C. Profiling self-regulation behaviors in STEM learning of engineering design. Comput. Educ. 2020, 143, 103669. [Google Scholar] [CrossRef]
- Wiek, A.; Withycombe, L.; Redman, C.L. Key competencies in sustainability: A reference framework for academic program development. Sustain. Sci. 2011, 6, 203–218. [Google Scholar] [CrossRef]
- Tan, N.; Mohan, R.E.; Foong, S.; Yamakita, M.; Iwase, M.; Hatakeyama, S.; Kamamichi, N.; Song, L.; Wang, Y.; Zhu, Q. IDC Robocon: A Transnational Teaming Competition for Project-Based Design Education in Undergraduate Robotics. Robotics 2016, 5, 12. [Google Scholar] [CrossRef]
- Jung, S. Experiences in Developing an Experimental Robotics Course Program for Undergraduate Education. IEEE Trans. Educ. 2013, 56, 129–136. [Google Scholar] [CrossRef]
- Tjiharjadi, S. Design and Implementation of Flood Fill and Pledge Algorithm for Maze Robot. Int. J. Mech. Eng. Robot. Res. 2019, 8, 632–638. [Google Scholar] [CrossRef]
- Ecsedi, E.; Silaghi, H.; Mihok, E.; Spoială, V. The Development of an Autonomous Maze Robot. In Proceedings of the 15th International Conference on Engineering of Modern Electric Systems (EMES), Oradea, Romania, 13–14 June 2019; pp. 169–172. [Google Scholar] [CrossRef]
- Kumar, R.; Jitoko, P.; Kumar, S.; Pillay, K.; Prakash, P.; Sagar, A.; Singh, R.; Mehta, U. Maze Solving Robot with Automated Obstacle Avoidance. Procedia Comput. Sci. 2017, 105, 57–61. [Google Scholar] [CrossRef]
- van Putten, B.J.S. Design of a Maze Solving Robot Using Lego Mindstorms; Technische Universiteit Eindhoven: Eindhoven, The Netherlands, 2006. [Google Scholar]
- Iwano, T.M.; Vieira, J.S.D.S.; de Oliveira, D.M.; Scherer, D. A Teacher Experience Report with LEGO Robotics. In Proceedings of the IEEE 19th International Conference on Advanced Learning Technologies (ICALT), Maceio, Brazil, 15–18 July 2019; pp. 277–278. [Google Scholar] [CrossRef]
- Seung, K.; Jeon, J. Programming LEGO Mindstorms NXT with visual programming. In Proceedings of the 2007 International Conference on Control, Automation and Systems, Seoul, Korea, 17–20 October 2007; pp. 2468–2472. [Google Scholar]
- Del Rosario, J.R.; Sanidad, J.; Lim, A.; Uy, P.; Bacar, A.; Cai, M.; Dubouzet, A. Modelling and Characterization of a Maze-Solving Mobile Robot Using Wall Follower Algorithm. Appl. Mech. Mater. 2013, 446–447, 1245–1249. [Google Scholar] [CrossRef]
- Saman, A.B.S.; Abdramane, I. Solving a Reconfigurable Maze using Hybrid Wall Follower Algorithm. Int. J. Comput. Appl. 2013, 82, 22–26. [Google Scholar]
- Research Kitchen. RoboMind Challenges: Maze Solving. Available online: https://www.robomind.net/downloads/Maze%20solving.pdf (accessed on 20 September 2020).
- Králík, V.; Majherová, J. Virtual Robotic Laboratories Robot C in the Informatic Teacher Training. In Proceedings of the XXIX. DIDMATTECH 2016, Budapest, Hungary, 25–26 August 2016. [Google Scholar]
- Virtual Robotic Toolkit. Available online: https://www.virtualroboticstoolkit.com/ (accessed on 20 September 2020).
- Robot Virtual Worlds—LEGO 4.x. Available online: http://www.robotc.net/purchase/rvw/rvw-lego-4.php (accessed on 20 September 2020).
- Solak, S.; Yakut, Ö.; Dogru Bolat, E. Design and Implementation of Web-Based Virtual Mobile Robot Laboratory for Engineering Education. Symmetry 2020, 12, 906. [Google Scholar] [CrossRef]
- Cronbach, L.J. Coefficient alpha and the internal structure of tests. Psychometrika 1951, 16, 297–334. Available online: http://psych.colorado.edu/~carey/Courses/PSYC5112/Readings/alpha_Cronbach.pdf (accessed on 20 September 2020).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Crossroads | Sensor | Movement | Sum | ||
|---|---|---|---|---|---|
| Left | Front | Right | |||
| (1) | (3) | (5) | |||
 | 0 | 0 | 0 | Turn 180° | 0 |
 | 1 | 1 | 1 | L, F, R | 9 |
 | 0 | 0 | 1 | R | 5 |
 | 0 | 1 | 0 | F | 3 |
 | 1 | 0 | 0 | L | 1 |
 | 1 | 1 | 0 | L, F | 4 |
 | 1 | 0 | 1 | L, R | 6 |
 | 0 | 1 | 1 | F, R | 8 |
| Maze | Algorithm | |||
|---|---|---|---|---|
| Random Mouse | Wall Following Right-Hand Rule | Wall Following Left-Hand Rule | Pledge Algorithm | |
| version 1 | 101.27 | 39.56 | 50.63 | 76.40 |
| version 2 | 109.65 | 49.84 | 42.08 | 51.41 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Coufal, P.; Hubálovský, Š.; Hubálovská, M. Application of Basic Graph Theory in Autonomous Motion of Robots. Mathematics 2021, 9, 919. https://doi.org/10.3390/math9090919
Coufal P, Hubálovský Š, Hubálovská M. Application of Basic Graph Theory in Autonomous Motion of Robots. Mathematics. 2021; 9(9):919. https://doi.org/10.3390/math9090919
Chicago/Turabian StyleCoufal, Petr, Štěpán Hubálovský, and Marie Hubálovská. 2021. "Application of Basic Graph Theory in Autonomous Motion of Robots" Mathematics 9, no. 9: 919. https://doi.org/10.3390/math9090919
APA StyleCoufal, P., Hubálovský, Š., & Hubálovská, M. (2021). Application of Basic Graph Theory in Autonomous Motion of Robots. Mathematics, 9(9), 919. https://doi.org/10.3390/math9090919