
An Efficient Satellite Resource Cooperative Scheduling Method on Spatial Information Networks

 , ,
, ,
Abstract
:1. Introduction
- 1.
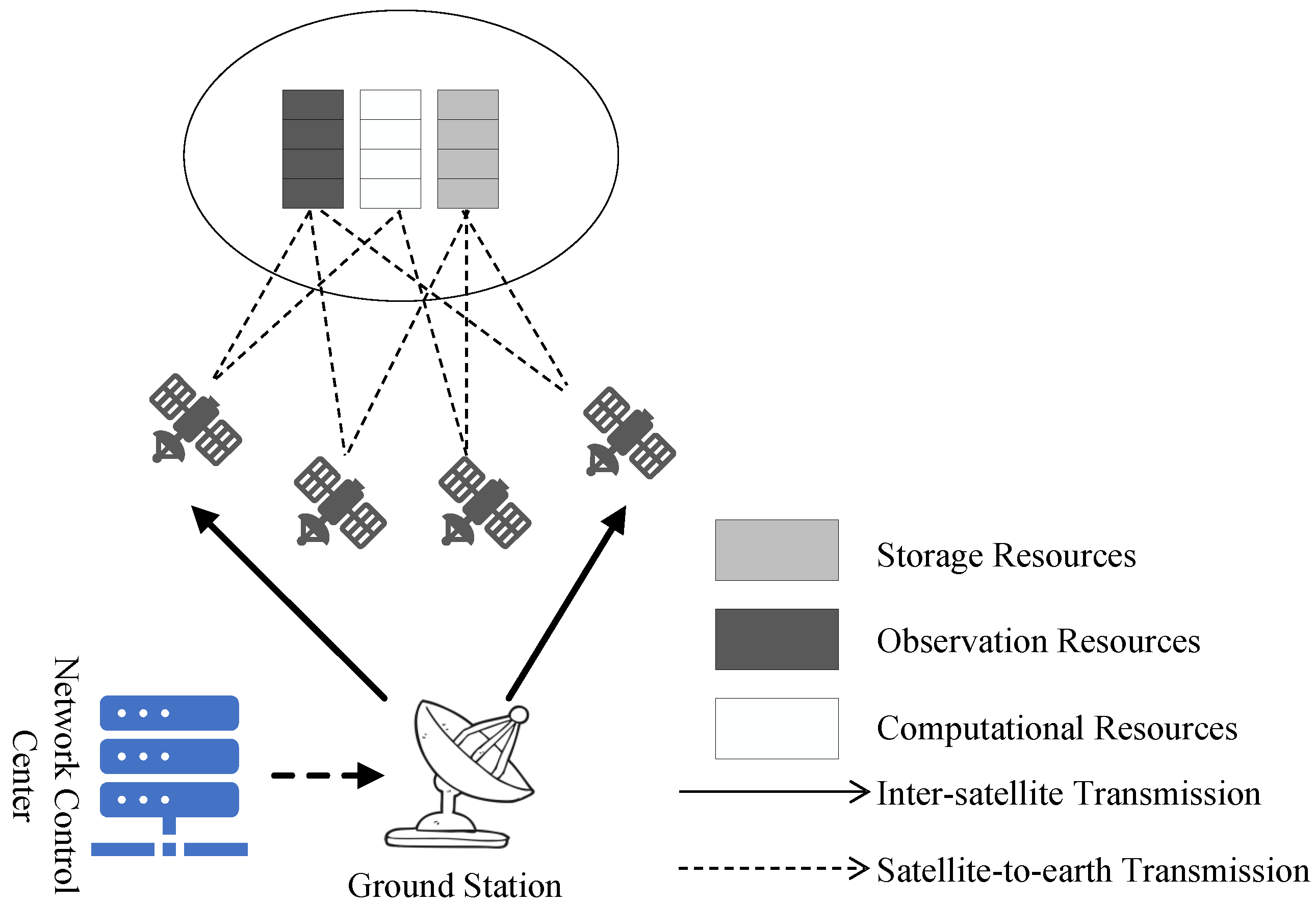
- The existing satellite resource scheduling process requires a visible time window between the satellite and the ground station, which will lead to long waiting time costs and poor timeliness of resource scheduling. An essential issue for research is breaking through the barrier of ground base station control, coordinating the free satellite resources, and improving resource utilization [1].
- 2.
- 1.
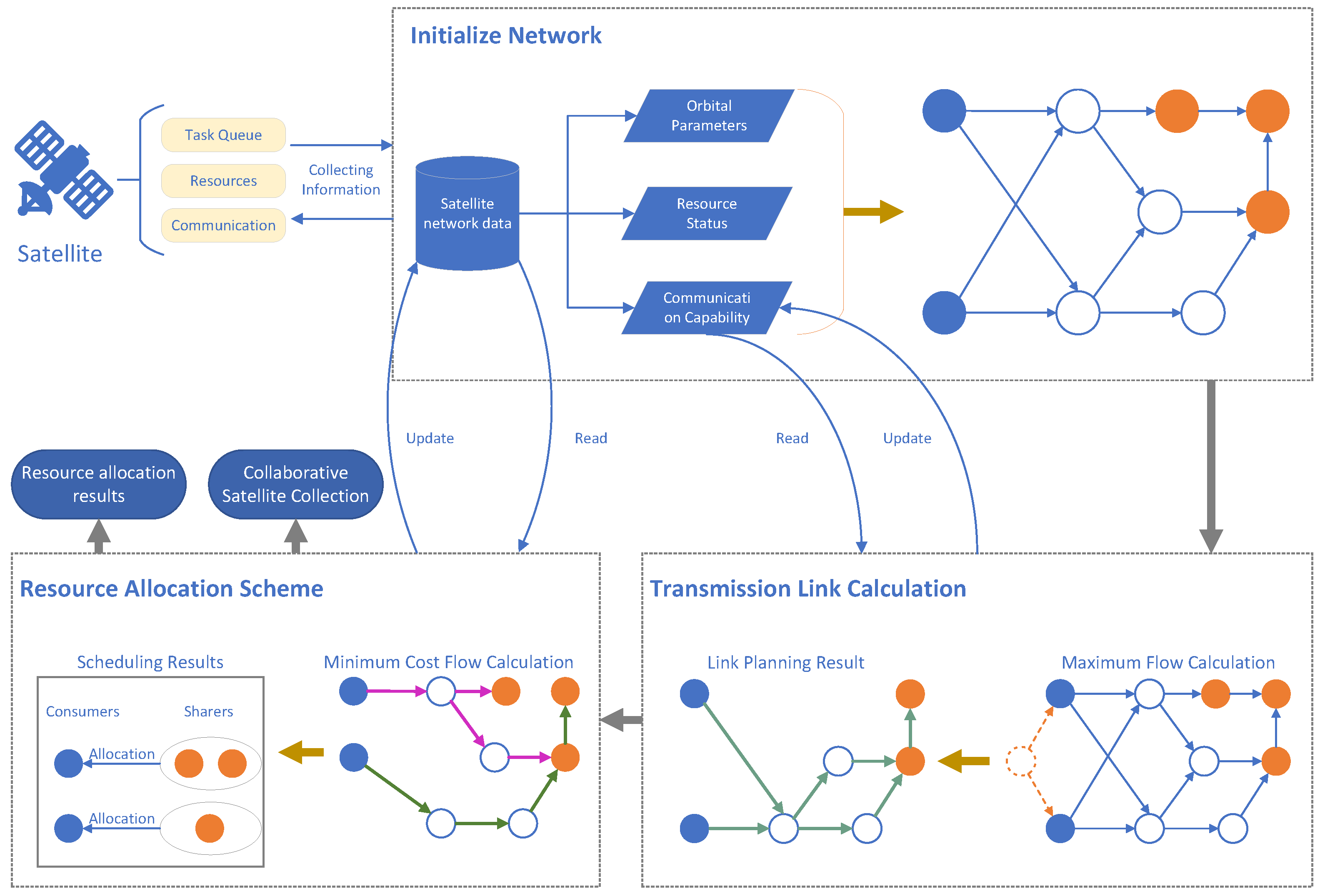
- We propose the RQRCS method that mainly includes a multi-satellite resource scheduling model and algorithm based on the dynamic reconstruction of a multi-satellite cooperative resource request queue. We aim to minimize the execution time of the resource request queue and solve the problem of poor timeliness of spatial information network resource scheduling to achieve the goal of rapid response to the resource request of the task.
- 2.
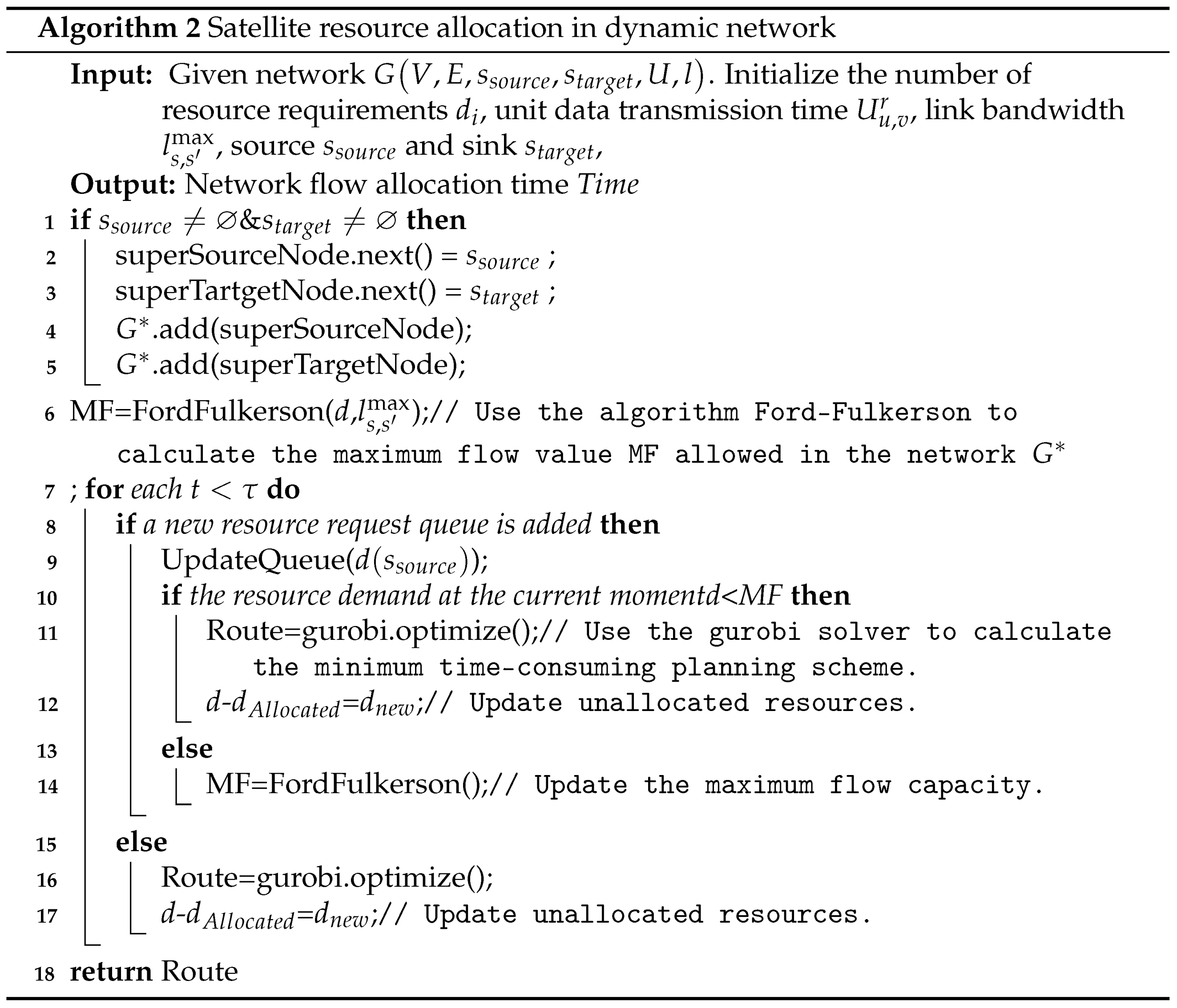
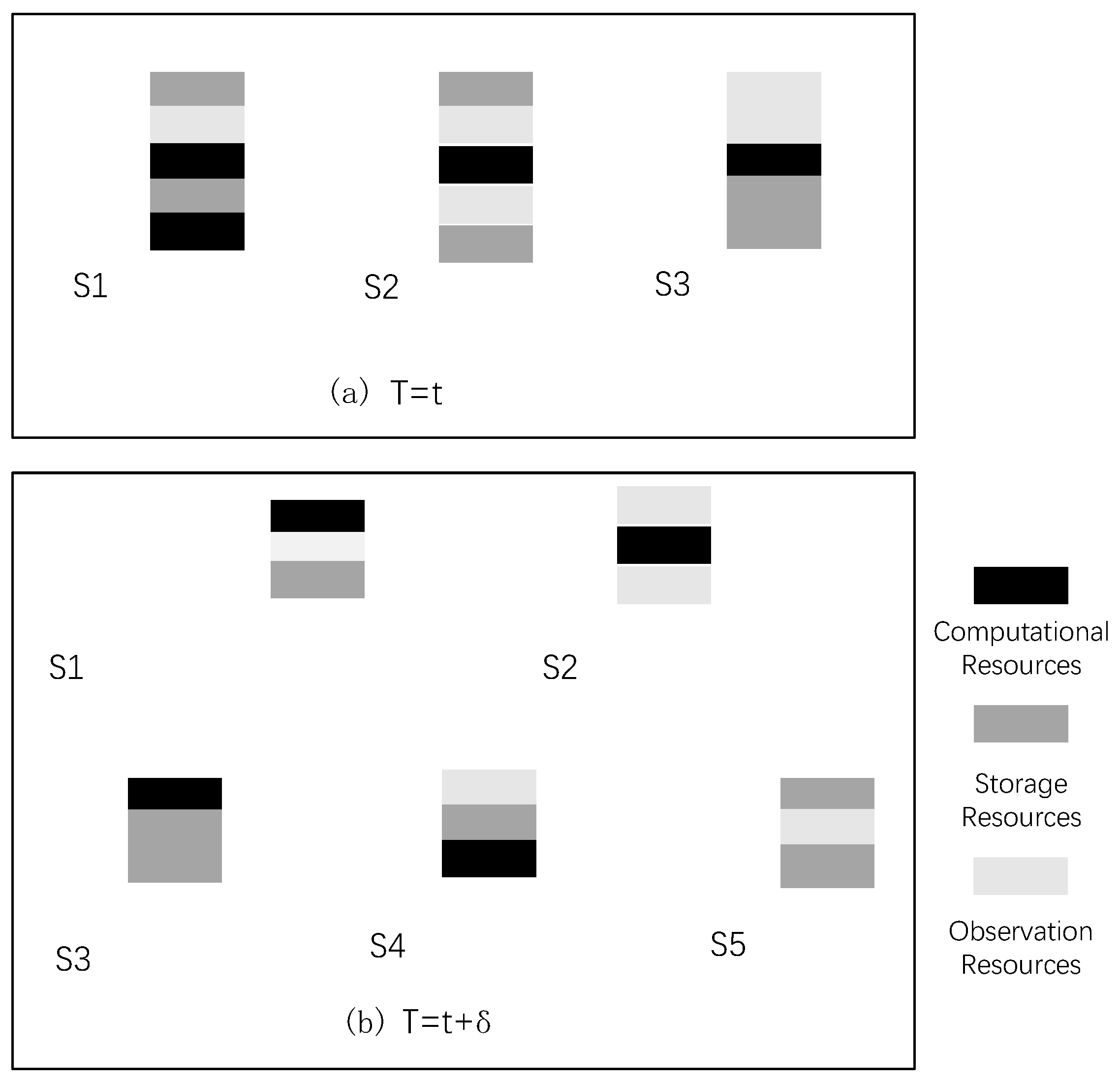
- In order to prevent the resource scheduling process from relying too much on the ground-based stations and causing significant waiting time delays, we investigate an autonomous resource allocation strategy on satellites. First, we obtain information on the status of idle storage and observation resources on the neighboring satellites of the current satellite and construct a small-satellite network. Then, we construct a minimum cost flow calculation model for dynamic maps to calculate the mission data transmission route with the shortest time to solve the problem of fast and cooperative allocation of multi-satellite resources.
- 3.
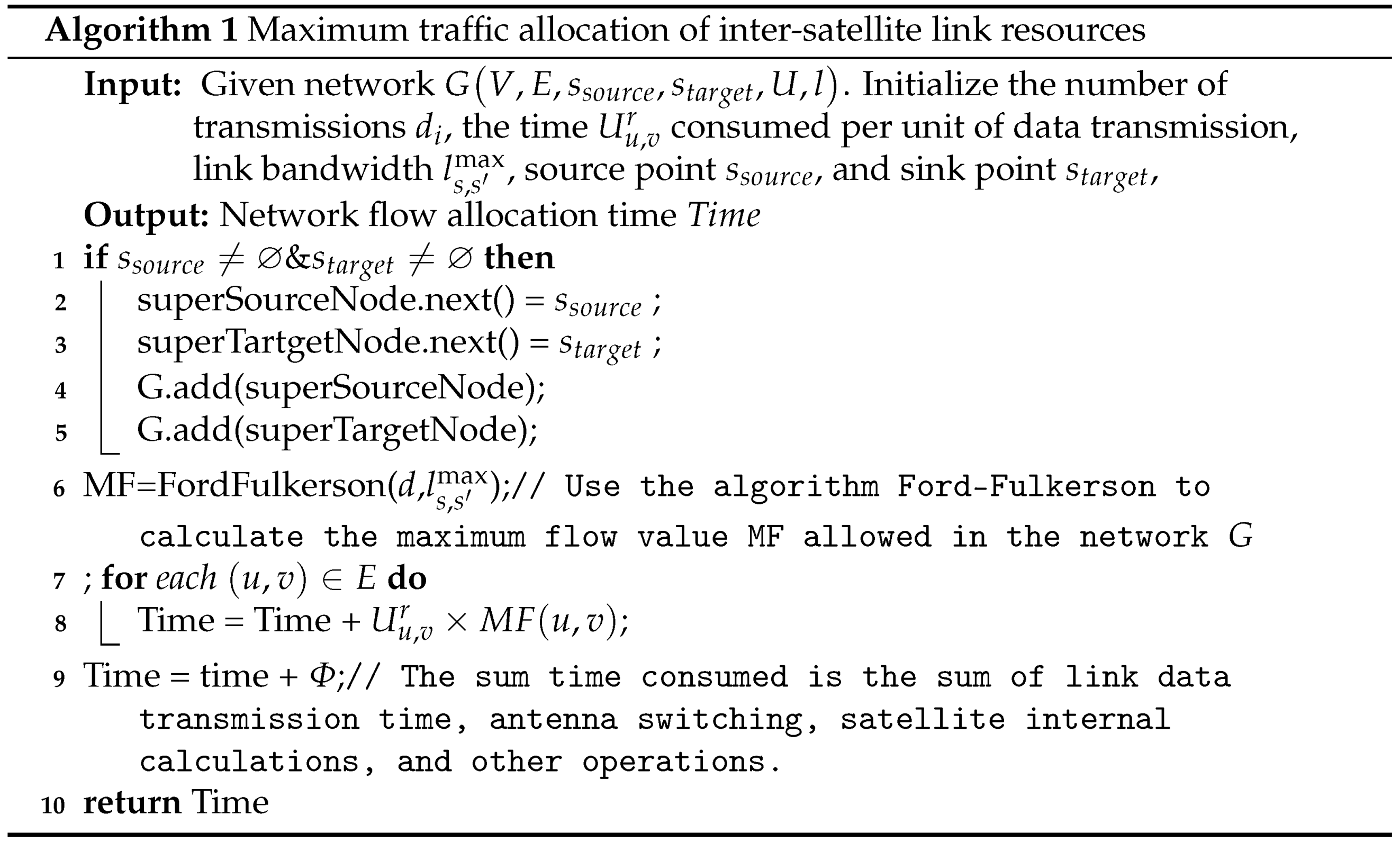
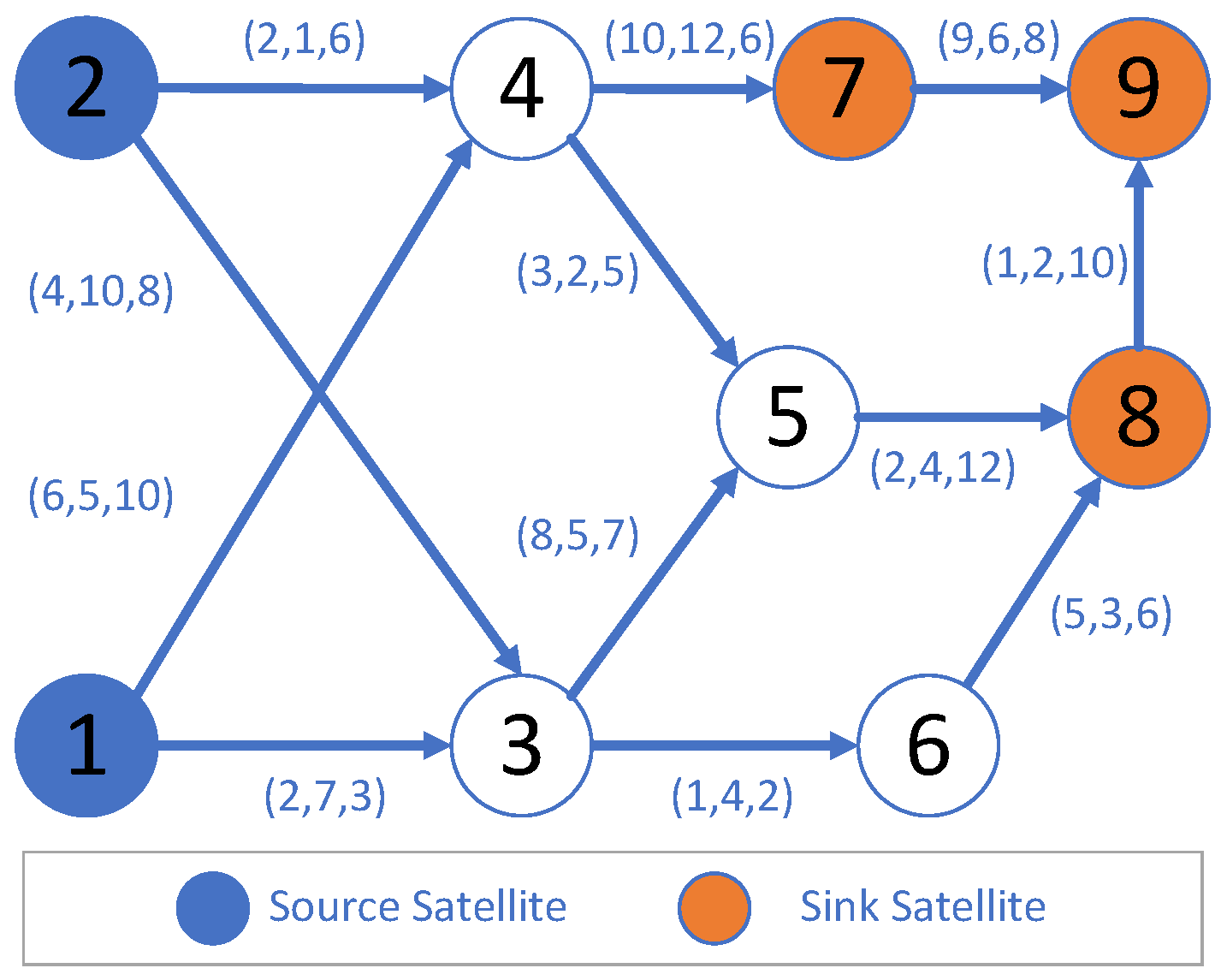
- To solve the problem of contention for spatial information network link resources, we calculate the transmission route and the maximum data flow at the current moment according to the link resources usage and the amount of data to be transmitted. We transform the global link optimization problem from a small spatial information network to a multi-objective maximum network flow problem. Then, we design the maximum flow allocation of inter-satellite link resources algorithm to improve the utilization of link resources and reduce the time consumed by resource contention.
2. Related Work
2.1. Resource Scheduling for Single Satellite
2.2. Resource Scheduling Method Based on Machine Learning
2.3. Resource Scheduling Method Based on an Intelligent Optimization Algorithm
2.4. Resource Scheduling Method Based on Game Theory
3. Satellite Resource Scheduling Problem Formulation
3.1. Preliminaries
3.2. Problem Formulation
4. Resource Request Queue Reconstruction and Collaborative Scheduling Method
4.1. Problem Conversion
4.2. Link Resource Competition Optimization
4.3. Resource Cooperative Allocation Optimization
5. Numerical Experiment
5.1. Algorithm Complexity Analysis
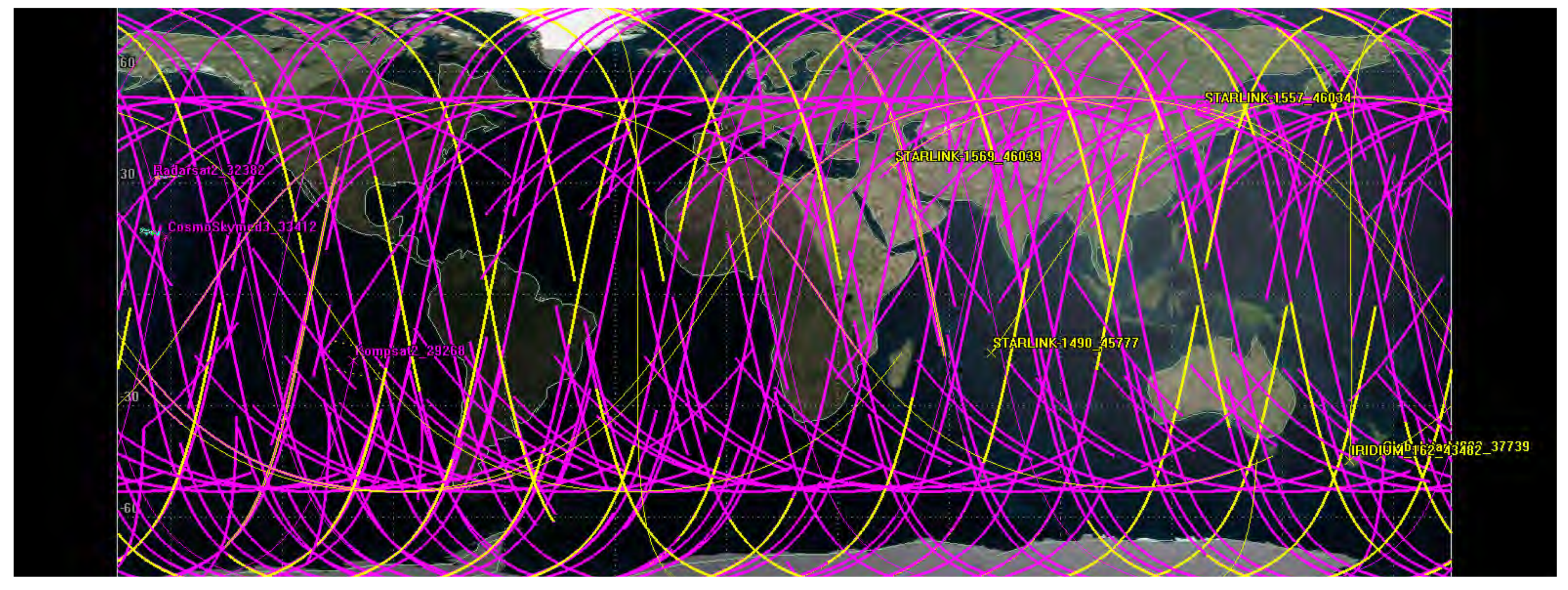
5.2. Simulation Scenario
5.3. Parameter Setting
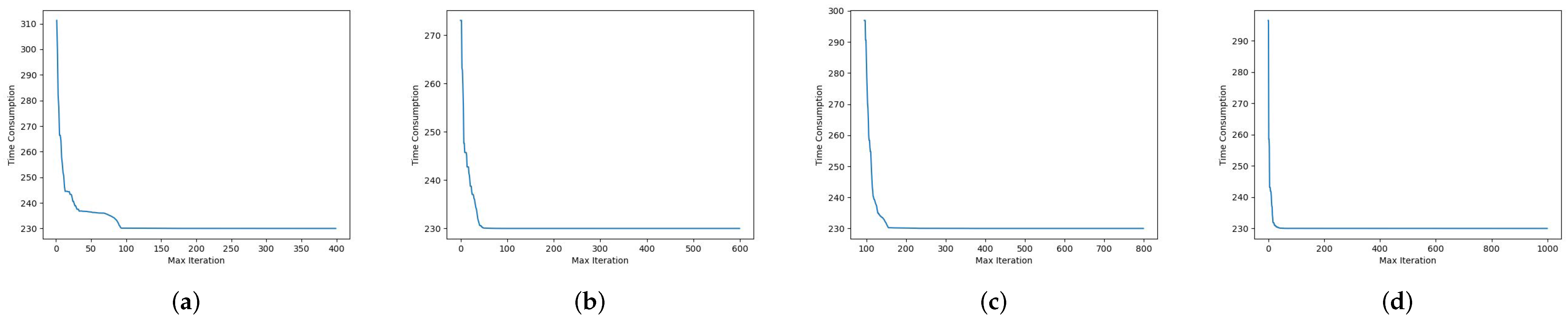
5.4. Results Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, R.; Han, X.-D.; An, W.-Y.; Song, K.-Z.; Han, H. Research of Improved Genetic Algorithm for Resource Allocation in Space-based Information Network. In Proceedings of the International Conference on Wireless and Satellite Systems, Nanjing, China, 17–18 September 2020; pp. 139–152. [Google Scholar]
- Zhong, X.; Yin, H.; He, Y.; Zhu, H. Joint transmit power and bandwidth allocation for cognitive satellite network based on bargaining game theory. IEEE Access 2018, 7, 6435–6449. [Google Scholar] [CrossRef]
- Shu, Z.; Wang, G.; Tian, X.; Shen, D.; Pham, K.; Blasch, E.; Chen, G. Game theoretic power allocation and waveform selection for satellite communications. In Sensors and Systems for Space Applications VIII, Proceedings of the International Society for Optics and Photonics; SPIE: Baltimore, MD, USA, 2015; Volume 9469, pp. 71–79. [Google Scholar]
- Wolfe, W.J.; Sorensen, S.E. Three scheduling algorithms applied to the earth observing systems domain. Manag. Sci. 2000, 46, 148–166. [Google Scholar] [CrossRef]
- Zhou, B.-Y.; Wang, A.-P. A satellite network resource scheduling mechanism based on reinforcement learning. Comput. Eng. Sci. 2019, 41, 2134–2142. [Google Scholar]
- Jin, F.; Zhang, X.; Ni, G. A static weighted queue scheduling algorithm in satellite network. Comput. Appl. Softw. 2012, 29, 64–68. [Google Scholar]
- Dixit, S.; Guo, Y.; Antoniou, Z. Resource management and quality of service in third generation wireless networks. IEEE Commun. Mag. 2001, 39, 125–133. [Google Scholar] [CrossRef] [Green Version]
- Xie, P.; Wang, H.; Chen, Y.; Wang, P. A heuristic algorithm based on temporal conflict network for agile Earth observing satellite scheduling problem. IEEE Access 2019, 7, 61024–61033. [Google Scholar] [CrossRef]
- Florea, I. One algorithmic approach of first-come-first-served queuing systems. Buchar. Univ. Ann. Inform. 2000, 49, 41–58. [Google Scholar]
- Owaidat, B.; Nassar, H.; Kassem, R. A shortest job first (SJF)-like scheme for efficient call handoff in mobile networks. In Proceedings of the 2015 Fifth International Conference on Digital Information and Communication Technology and its Applications (DICTAP), Beirut, Lebanon, 29 April–1 May 2015; pp. 216–221. [Google Scholar]
- Khan, A.; McCreary, C.L.; Jones, M.S. A comparison of multiprocessor scheduling heuristics. In Proceedings of the 1994 Internatonal Conference on Parallel Processing, Bristol, UK, 15–19 August 1994; Volume 2, pp. 243–250. [Google Scholar]
- Wang, Y.J.; Zhang, H. Research on Imaging Reconnaissance Satellite Scheduling Based on Genetic Algorithm. Ordnance Ind. Autom. 2008, 10, 83–85, 91. [Google Scholar]
- Chen, M.; Liu, W.; Wang, T.; Zhang, S.; Liu, A. A game-based deep reinforcement learning approach for energy-efficient computation in MEC systems. Knowl.-Based Syst. 2021, 235, 107660. [Google Scholar] [CrossRef]
- Chen, M.; Liu, A.; Liu, W.; Ota, K.; Dong, M.; Xiong, N. RDRL A Recurrent Deep Reinforcement Learning Scheme for Dynamic Spectrum Access in Reconfigurable Wireless Networks. IEEE Trans. Netw. Sci. Eng. 2021. [Google Scholar] [CrossRef]
- He, L.; Li, J.; Sheng, M.; Liu, R.; Guo, K.; Zhou, D. Dynamic scheduling of hybrid tasks with time windows in data relay satellite networks. IEEE Trans. Veh. Technol. 2019, 68, 4989–5004. [Google Scholar] [CrossRef]
- Meng, H.; Li, C.; Lu, W.; Dong, Y.; Zhao, Z.; Wu, B. Multi-satellite resource scheduling based on deep neural network. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019; pp. 1–7. [Google Scholar]
- Lu, J.; Chen, Y.; He, R. A learning-based approach for agile satellite onboard scheduling. IEEE Access 2020, 8, 16941–16952. [Google Scholar] [CrossRef]
- Li, J.; Li, C.; Wang, F. Automatic scheduling for earth observation satellite with temporal specifications. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 3162–3169. [Google Scholar] [CrossRef]
- Zhou, D.; Sheng, M.; Luo, J.; Liu, R.; Li, J.; Han, Z. Collaborative data scheduling with joint forward and backward induction in small satellite networks. IEEE Trans. Commun. 2019, 67, 3443–3456. [Google Scholar] [CrossRef]
- Zhu, W.; Hu, X.; Xia, W.; Sun, H. A three-phase solution method for the scheduling problem of using earth observation satellites to observe polygon requests. Comput. Ind. Eng. 2019, 130, 97–107. [Google Scholar] [CrossRef]
- Chen, X.; Reinelt, G.; Dai, G.; Spitz, A. A mixed integer linear programming model for multi-satellite scheduling. Eur. J. Oper. Res. 2019, 275, 694–707. [Google Scholar] [CrossRef] [Green Version]
- Qi, W.; Du, Y.; Xing, L.; Chen, Y. Multi-Objective Optimization Modeling and Solution of Multi-Satellite TT&lC Scheduling Problem. In Proceedings of the 2019 IEEE Symposium Series on Computational Intelligence (SSCI), Xiamen, China, 6–9 December 2019; pp. 1622–1627. [Google Scholar]
- Spangelo, S.; Cutler, J.; Gilson, K.; Cohn, A. Optimization-based scheduling for the single-satellite, multi-ground station communication problem. Comput. Oper. Res. 2015, 57, 1–16. [Google Scholar] [CrossRef]
- Lam, J.T.; Rivest, F.; Berger, J. Deep Reinforcement Learning for Multi-satellite Collection Scheduling. In Proceedings of the International Conference on Theory and Practice of Natural Computing, Kingston, ON, Canada, 9–11 December 2019; pp. 184–196. [Google Scholar]
- Wang, P.; Li, H.; Zhang, S.; Lin, X.; Liu, J.; Wang, E. A Novel Joint Scheduling Scheme of Earth Observation and Transmission in Satellite Networks. In Proceedings of the 2020 International Conference on Computing, Networking and Communications (ICNC), Big Island, HI, USA, 17–20 February 2020; pp. 774–779. [Google Scholar]
- Wang, Y.; Sheng, M.; Ye, Q.; Zhang, S.; Zhuang, W.; Li, J. Optimal Dynamic Multi-Resource Management in Earth Observation Oriented Space Information Networks. arXiv 2019, arXiv:1907.12717. [Google Scholar]
- Zheng, Q.; Song, Y.; Liu, J.; Yu, D. A resource reservation and scheduling algorithm for learning on-demand system over satellite and cable network. In Proceedings of the Fourth International Symposium on Multimedia Software Engineering, Newport Beach, CA, USA, 11–13 December 2002; pp. 166–173. [Google Scholar]
- Jian, L.; Cheng, W. Resource planning and scheduling of payload for satellite with genetic particles swarm optimization. In Proceedings of the 2008 IEEE Congress on Evolutionary Computation (IEEE World Congress on Computational Intelligence), Hong Kong, China, 1–6 June 2008; pp. 199–203. [Google Scholar]
- Na, Z.; Zu-ren, F.; Liang-jun, K. New pheromone trail updating method of ACO for satellite control resource scheduling problem. In Proceedings of the IEEE Congress on Evolutionary Computation, Barcelona, Spain, 18–23 July 2010; pp. 1–6. [Google Scholar]
- Zhang, N.; Feng, Z.R.; Ke, L.J. Guidance-solution based ant colony optimization for satellite control resource scheduling problem. Appl. Intell. 2011, 35, 436–444. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, N.; Feng, Z. Multi-satellite control resource scheduling based on ant colony optimization. Expert Syst. Appl. 2014, 41, 2816–2823. [Google Scholar] [CrossRef]
- Zhang, Z.; Hu, F.; Zhang, N. Ant colony algorithm for satellite control resource scheduling problem. Appl. Intell. 2018, 48, 3295–3305. [Google Scholar] [CrossRef]
- Chen, H.; Zhong, Z.; Wu, J.; Jing, N. Multi-satellite data downlink resource scheduling algorithm for incremental observation tasks based on evolutionary computation. In Proceedings of the 2015 Seventh International Conference on Advanced Computational Intelligence (ICACI), Wuyi, China, 27–29 March 2015; pp. 251–256. [Google Scholar]
- Liu, Z.; Feng, Z.; Ke, L. Fireworks algorithm for the multi-satellite control resource scheduling problem. In Proceedings of the 2015 IEEE Congress on Evolutionary Computation (CEC), Sendai, Japan, 25–28 May 2015; pp. 1280–1286. [Google Scholar]
- Tan, Y.; Zhu, Y. Fireworks algorithm for optimization. In Proceedings of the International Conference in Swarm Intelligence, Beijing, China, 12–15 June 2010; pp. 355–364. [Google Scholar]
- Liu, J.; Zheng, S.; Tan, Y. The improvement on controlling exploration and exploitation of firework algorithm. In Proceedings of the International Conference in Swarm Intelligence, Harbin, China, 12–15 June 2013; pp. 11–23. [Google Scholar]
- Zheng, S.; Janecek, A.; Tan, Y. Enhanced fireworks algorithm. In Proceedings of the 2013 IEEE Congress on Evolutionary Computation, Cancun, Mexico, 20–23 June 2013; pp. 2069–2077. [Google Scholar]
- Liang, Q.; Fan, Y.; Yan, X.; Yan, Y. An algorithm based on differential evolution for satellite data transmission scheduling. Int. J. Comput. Sci. Eng. 2019, 18, 279–285. [Google Scholar] [CrossRef]
- Marinelli, F.; Nocella, S.; Rossi, F.; Smriglio, S. A Lagrangian heuristic for satellite range scheduling with resource constraints. Comput. Oper. Res. 2011, 38, 1572–1583. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.; Wen, J.; Pi, B.J.; Wang, H.; Song, Y.J.; Xing, L.N. A Novel Genetic Algorithm with Population Perturbation and Elimination for Multi-satellite TT&C Scheduling Problem. In Proceedings of the International Conference on Bio-Inspired Computing: Theories and Applications, Zhengzhou, China, 22–25 November 2019; pp. 558–568. [Google Scholar]
- Deng, X.; Zhu, L. Resource Allocation Strategy of Satellite Network Matching Game in Multi-user Scenario. Radio Commun. Technol. 2019, 45, 615–621. [Google Scholar]
- Khan, S.U.; Ahmad, I. A cooperative game theoretical technique for joint optimization of energy consumption and response time in computational grids. IEEE Trans. Parallel Distrib. Syst. 2008, 20, 346–360. [Google Scholar] [CrossRef] [Green Version]
- Guidolin, F.; Nekovee, M.; Badia, L.; Zorzi, M. A cooperative scheduling algorithm for the coexistence of fixed satellite services and 5G cellular network. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 1322–1327. [Google Scholar]
- Lorenc, A.; Kuźnar, M. The most common type of disruption in the supply chain-evaluation based on the method using artificial neural networks. Int. J. Shipp. Transp. Logist. 2021, 13, 1–24. [Google Scholar] [CrossRef]
- Lorenc, A.; Kuźnar, M.; Lerher, T.; Szkoda, M. Predicting the probability of cargo theft for individual cases in railway transport. Teh. Vjesn. 2020, 27, 773–780. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Description |
|---|---|
| T | Discrete time |
| t | Slot time |
| S | Satellites |
| Q | Task queue |
| Time Slice | |
| Time consumption from node u to v | |
| The amount of resource | |
| Source Node Satellite Collection | |
| Neighborhood Nodes | |
| K | Request tasks |
| The source satellite | |
| The sink satellite | |
| The edge from u to v | |
| The data amount on the edge | |
| The time cost which consumed to complete a request | |
| The waiting delay and the corner time of antenna equipment | |
| The time consumption for all tasks performed on satellite s | |
| The time cost consumption for the resource request | |
| Link bandwidth | |
| V | Nodes in a network representing satellites |
| E | Edge in a network representing an inter-satellite link |
| G | The spatial information network |
| Resources Type | Sources Number | Sinks Number |
|---|---|---|
| 1 | 1 | 2 |
| 1 | 2 | 4 |
| 1 | 7 | −4 |
| 1 | 8 | −1 |
| 1 | 9 | −1 |
| 2 | 1 | 3 |
| 2 | 2 | 3 |
| 2 | 7 | −1 |
| 2 | 8 | −4 |
| 2 | 9 | −1 |
| Id | Satellite | Mission Class | Mean | Eccentricity | Inclination | Argument of Perigee | RAAN | Mean Anomaly |
|---|---|---|---|---|---|---|---|---|
| 1 | COSMO-SkyMed 3 | Earth Observation | 0.0617566 deg/s | 0.0001561 | 97.8893 deg | 93.4363 deg | 348.021 deg | 266.704 deg |
| 2 | ZiYuan 2C | Earth Observation | 0.0626305 deg/s | 0.004758 | 97.2866 deg | 62.7732 deg | 35.4333 deg | 297.833 deg |
| 3 | IRIDIUM_162 | Communications | 0.0601366 deg/s | 0.0002317 | 86.4485 deg | 96.0452 deg | 133.275 deg | 264.101 deg |
| 4 | STARLINK-1490 | Communications | 0.0627664 deg/s | 0.0001502 | 53.0558 deg | 82.9425 deg | 45.8273 deg | 277.173 deg |
| 5 | STARLINK-1557 | Communications | 0.0627666 deg/s | 0.0001709 | 53.0575 deg | 117.008 deg | 336.223 deg | 243.109 deg |
| 6 | STARLINK-1569 | Communications | 0.0627667 deg/s | 0.0001654 | 53.0574 deg | 108.432 deg | 336.473 deg | 251.684 deg |
| 7 | KOMPSAT-2 | Earth Observation | 0.060932 deg/s | 0.0018448 | 97.9422 deg | 95.7576 deg | 43.5438 deg | 264.572 deg |
| 8 | Proba-V | Earth Observation | 0.0592918 deg/s | 0.0005443 | 98.4077 deg | 91.3034 deg | 212.541 deg | 268.877 deg |
| 9 | RADARSAT-2 | Earth Observation | 0.0595828 deg/s | 0.0001296 | 98.5743 deg | 92.0516 deg | 171.152 deg | 30.1928 deg |
| 10 | Globalstar M083 | Communications | 0.0525945 deg/s | 0.0000275 | 51.9838 deg | 225.309 deg | 186.696 deg | 305.39 deg |
| ID | PSO | GA | ||
|---|---|---|---|---|
| P1 | 200 | 400 | 200 | 400 |
| P2 | 300 | 600 | 300 | 600 |
| P3 | 400 | 800 | 400 | 800 |
| P4 | 500 | 1000 | 500 | 1000 |
| Scheduling Route | Resource Transfers |
|---|---|
| 1 → 4 | 3 |
| 2 → 4 | 3 |
| 4 → 5 | 5 |
| 4 → 7 | 1 |
| 5 → 8 | 5 |
| 8 → 9 | 1 |
| Amount of time consumed per unit | 62 |
| Scheduling Route | Resource Transfers |
|---|---|
| 1 → 4 | 1 |
| 1 → 3 | 1 |
| 2 → 4 | 3 |
| 2 → 3 | 1 |
| 3 → 6 | 2 |
| 4 → 7 | 4 |
| 6 → 8 | 2 |
| 8 → 9 | 1 |
| Amount of time consumed per unit | 71 |
| Algorithm | Time Consumption | ||||
|---|---|---|---|---|---|
| - | P1 | P2 | P3 | P4 | |
| RQRCS | 133 | - | - | - | - |
| PSO | - | 230 | 230 | 230 | 230 |
| GA | - | 291 | 302 | 288 | 283 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, H.; Yang, Z.; Wu, S.; Zhang, X.; Long, J.; Liu, L. An Efficient Satellite Resource Cooperative Scheduling Method on Spatial Information Networks. Mathematics 2021, 9, 3293. https://doi.org/10.3390/math9243293
Fan H, Yang Z, Wu S, Zhang X, Long J, Liu L. An Efficient Satellite Resource Cooperative Scheduling Method on Spatial Information Networks. Mathematics. 2021; 9(24):3293. https://doi.org/10.3390/math9243293
Chicago/Turabian StyleFan, Huilong, Zhan Yang, Shimin Wu, Xi Zhang, Jun Long, and Limin Liu. 2021. "An Efficient Satellite Resource Cooperative Scheduling Method on Spatial Information Networks" Mathematics 9, no. 24: 3293. https://doi.org/10.3390/math9243293
APA StyleFan, H., Yang, Z., Wu, S., Zhang, X., Long, J., & Liu, L. (2021). An Efficient Satellite Resource Cooperative Scheduling Method on Spatial Information Networks. Mathematics, 9(24), 3293. https://doi.org/10.3390/math9243293