
A Soft-YoloV4 for High-Performance Head Detection and Counting


Abstract
:1. Introduction
2. Related Work
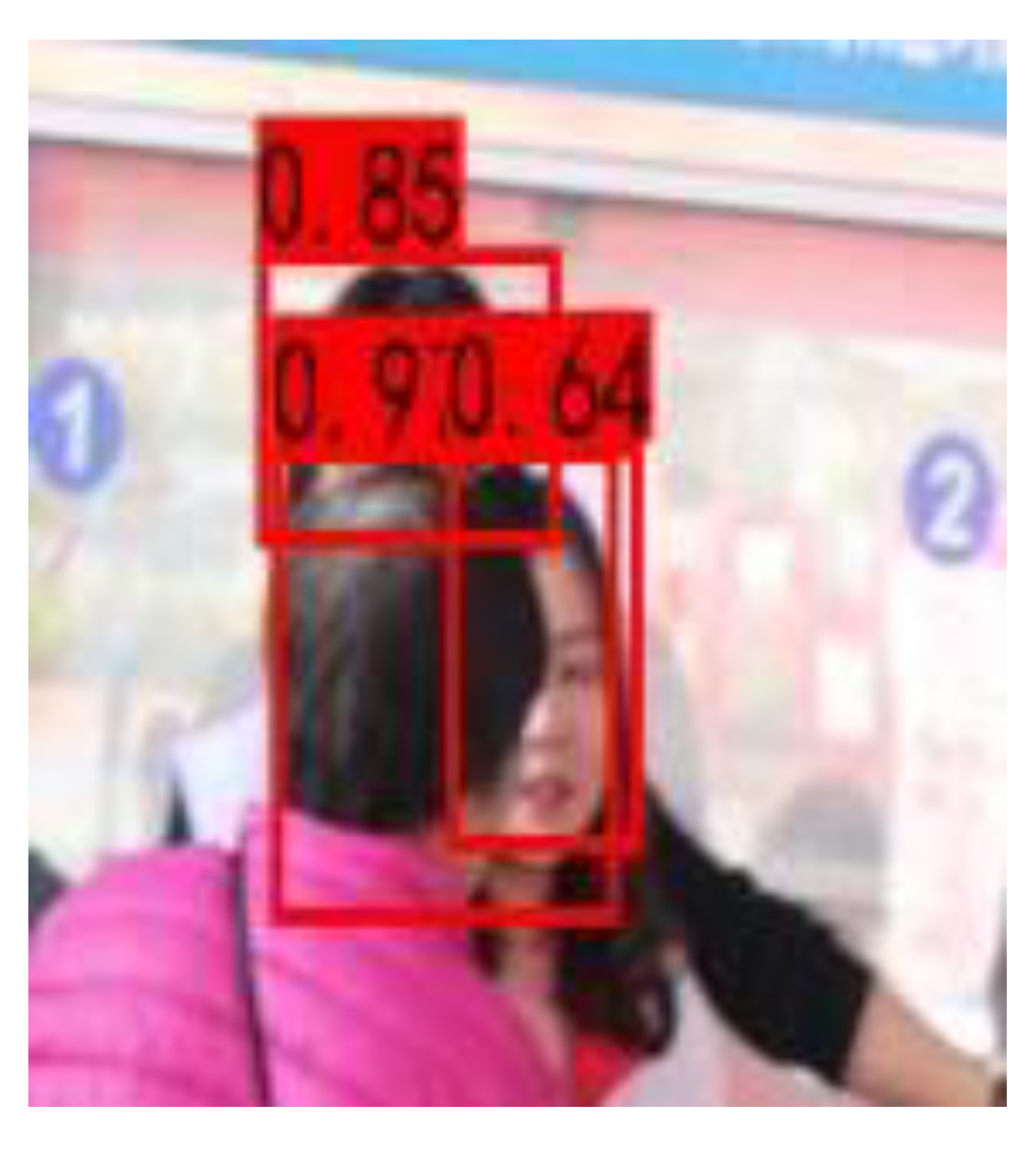
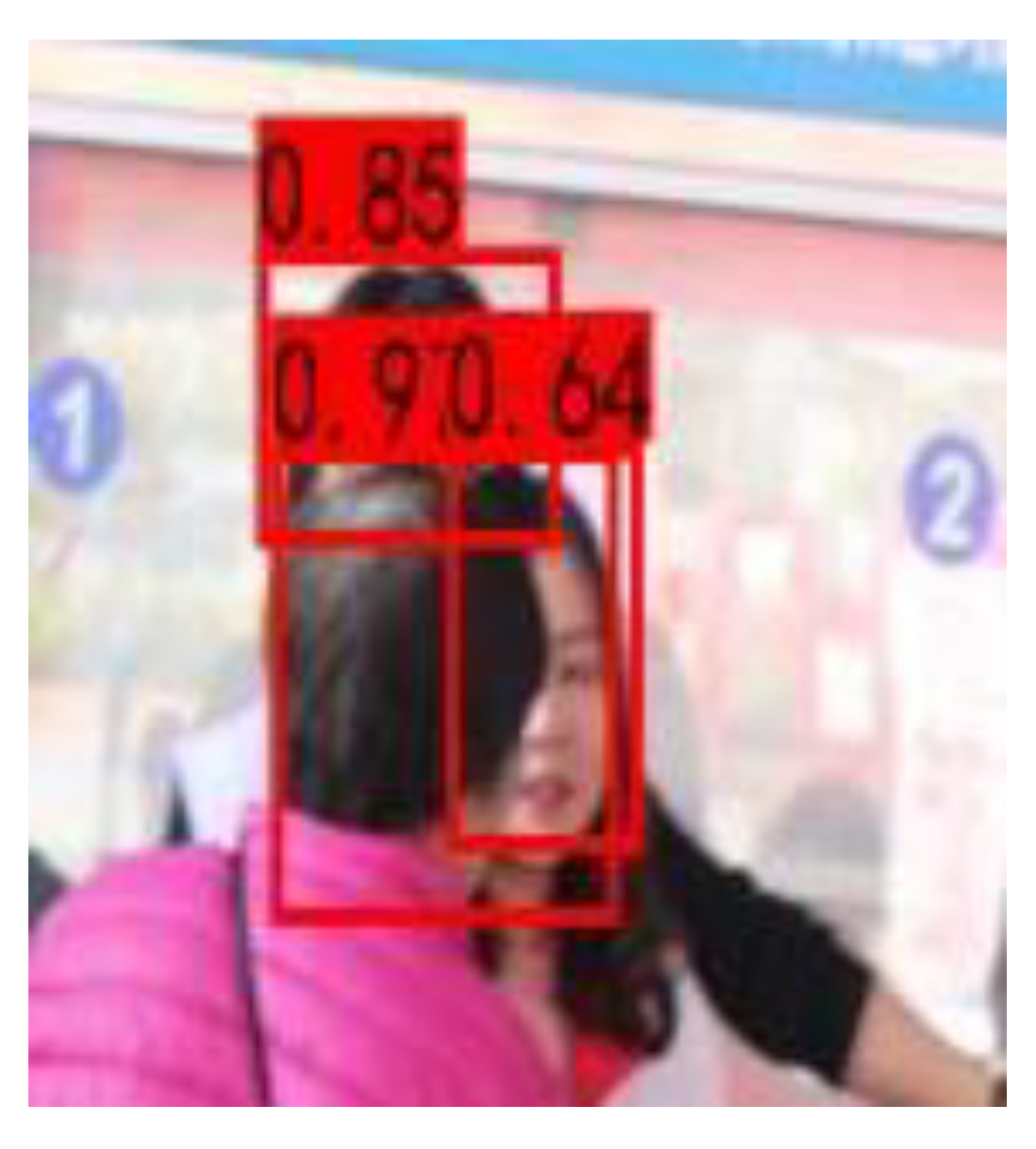
- We reveal why the conventional YoloV4 model is prone to miss detection in the case of people’s heads are blocked by each other;
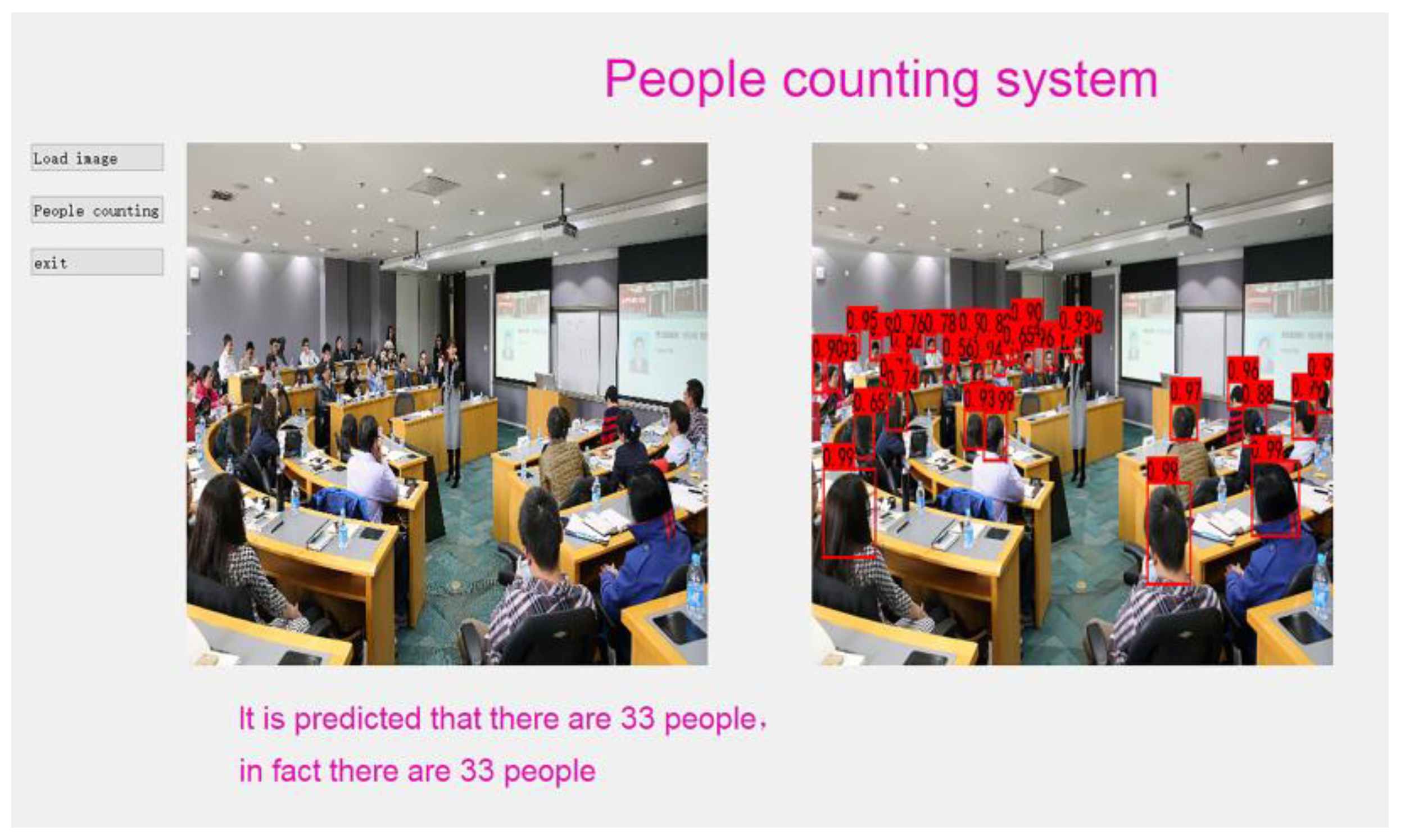
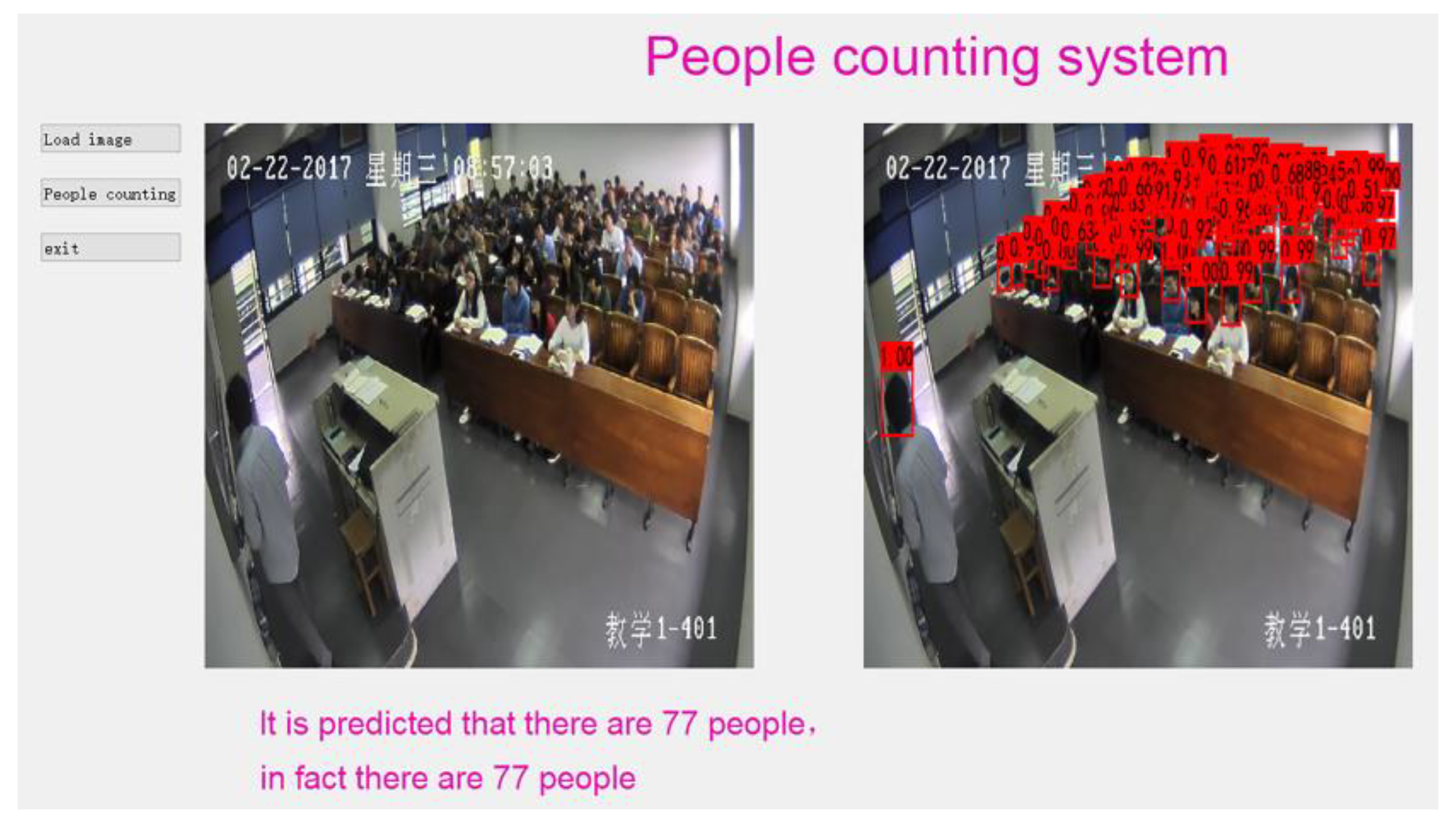
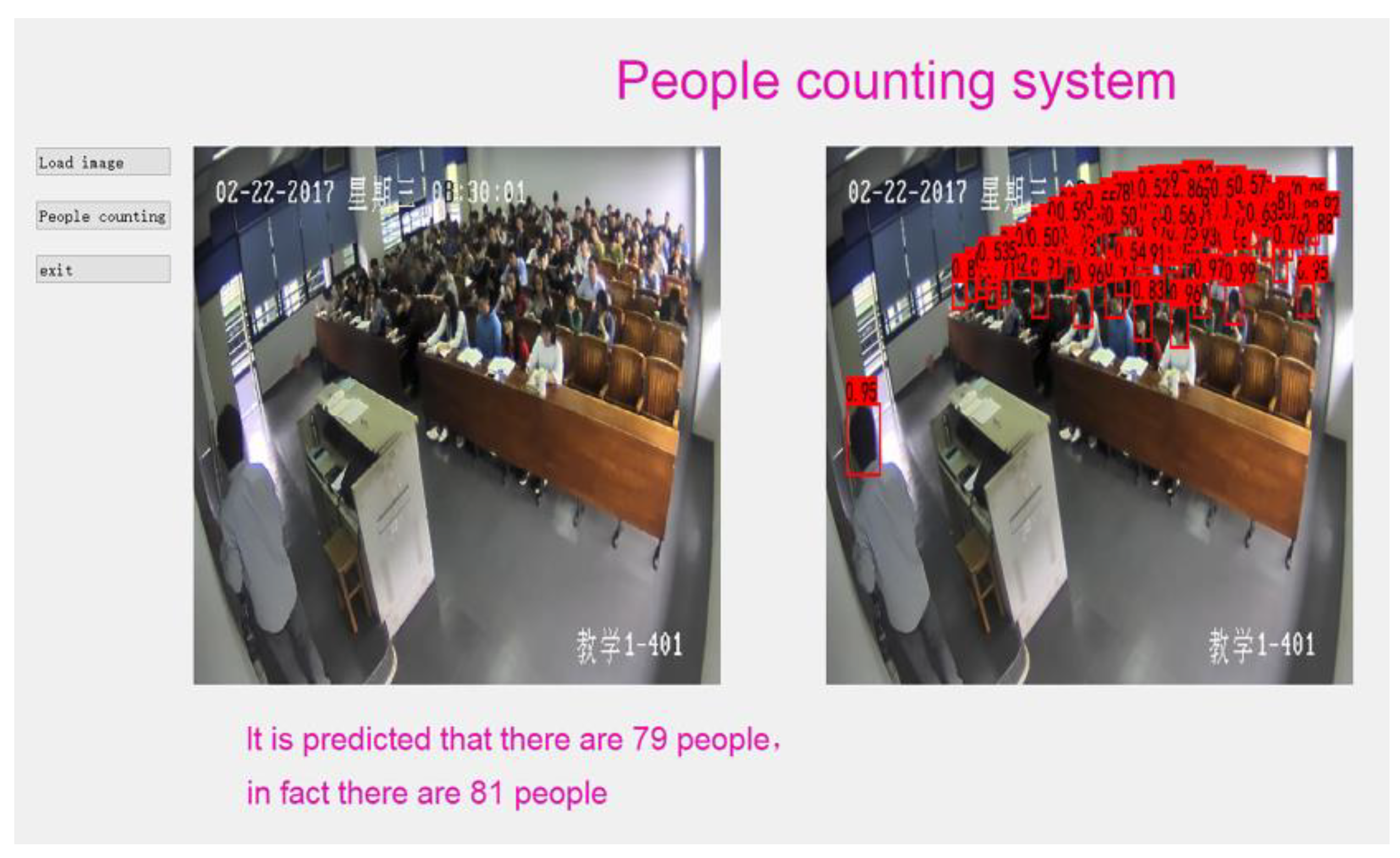
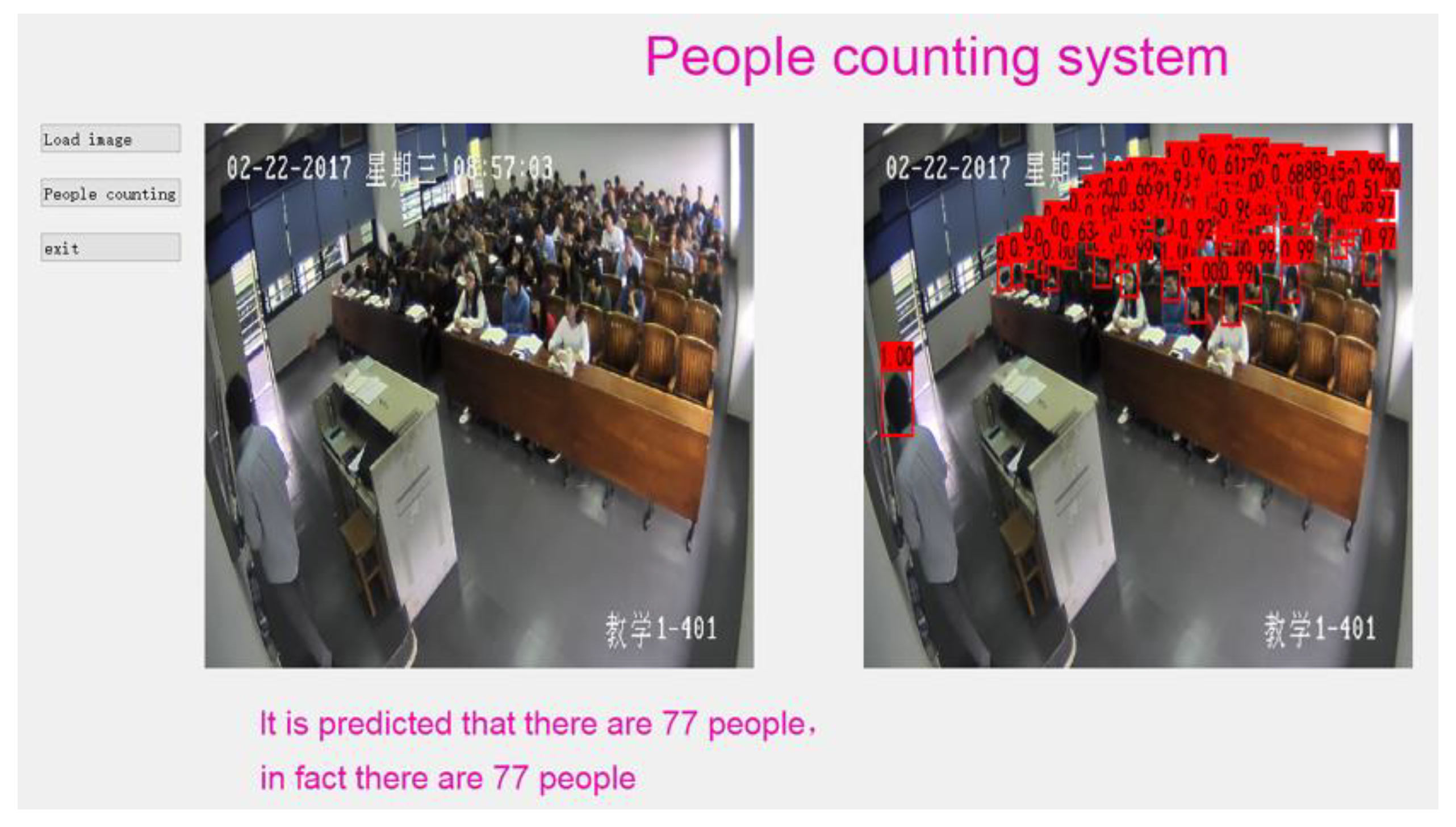
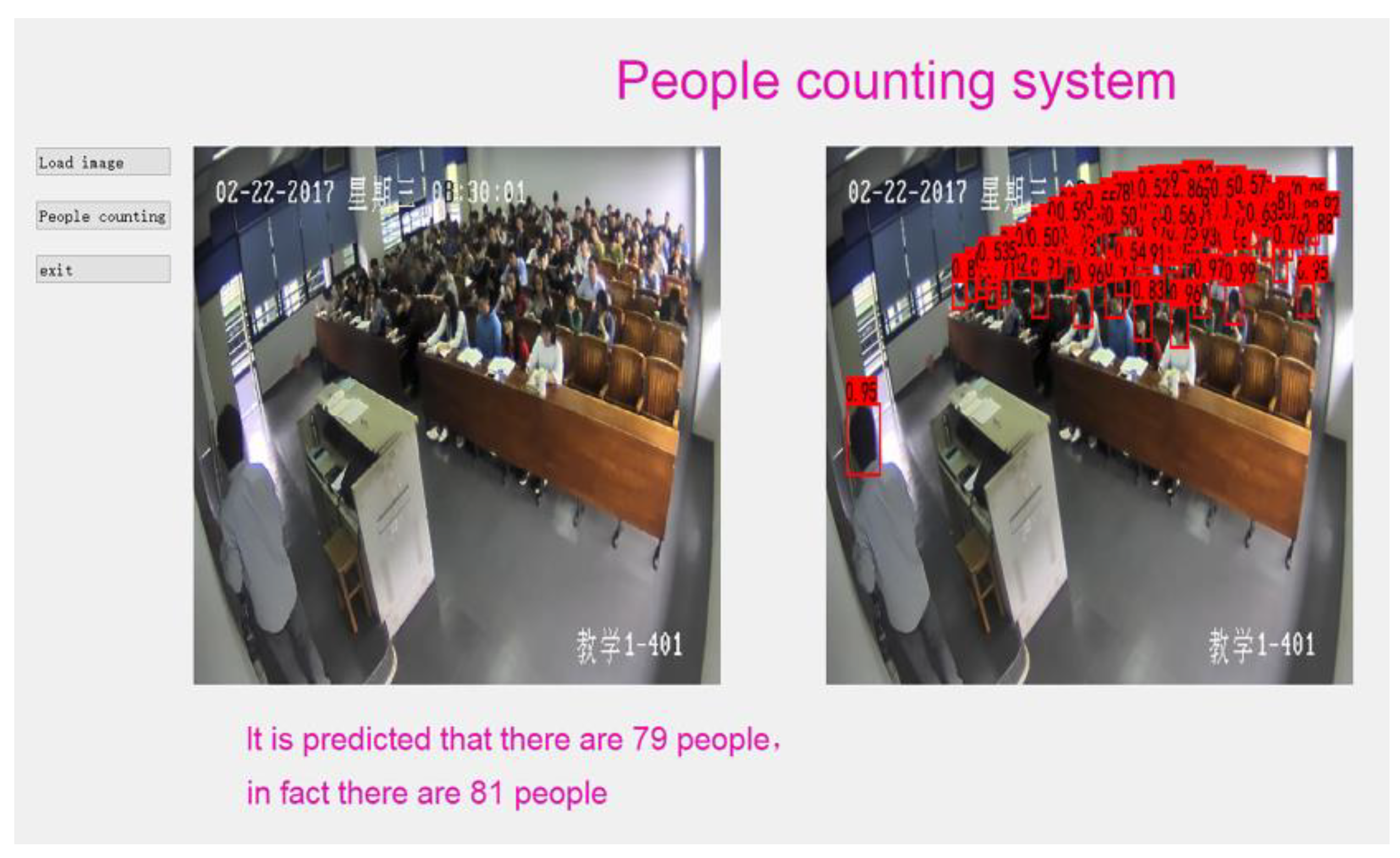
- We proposed a new head detection model (Soft-YoloV4) by improving YoloV4. The experiments in two datasets show that the number of people can be counted more accurately by Soft-YoloV4;
- We compared the Soft-YoloV4 and other methods previously reported, which showed that the Soft-YoloV4 has a better performance and is more conducive to real applications.
3. Methods
3.1. NMS Algorithm
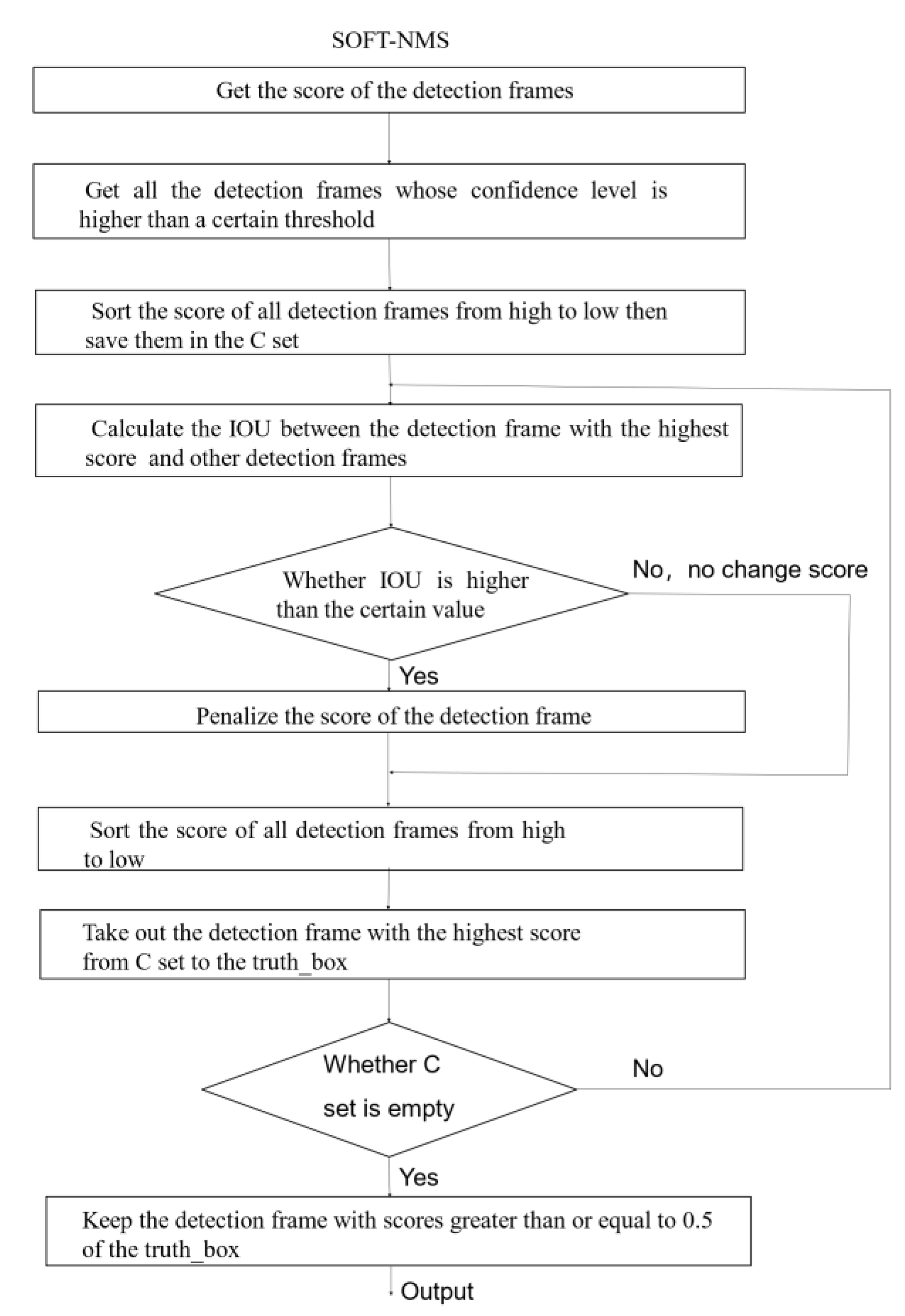
3.2. Principle of Soft-NMS Algorithm
- Sort the score of the detection frame in set (this score indicates the probability that the position of the detection frame belongs to this category) from high to low, and choose the frame with the highest score from the set.
- Traverse all the detection frames in set , and calculate the IOU of each detection frame and the detection frame with the highest score. Soft-NMS does not directly remove a detection frame from set but makes a corresponding penalty for this detection frame to decrease the score. The higher the degree of overlapping with the detection frame with the highest score, the more severe the score of this detection frame decreases. Then saving the detection frame into truth_box.
- Return to 1. until the set is empty, and finally, keep the detection frame with a score higher or equal to 0.5 in the truth_box as the output.
4. Experimental Datasets and Evaluation Indexes
5. Results
5.1. Comparison of NMS and Soft-NMS
5.2. Comparison with State-of-the-Arts
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tan, Y.L. Statistical Image Recognition Algorithm Based on Skin Color. J. Huaihai Inst. Technol. 2014, 23, 36–39. [Google Scholar]
- Zhang, L. Population Density Statistics Based on Face Detection; Lanzhou University of Technology: Lanzhou, China, 2018. [Google Scholar]
- Jin, Y.H. Video Pedestrian Detection and People Counting; Inner Mongolia University: Hohhot, China, 2018. [Google Scholar]
- Zeng, S.; Zhang, B.; Gou, J. Learning double weights via data augmentation for robust sparse and collaborative representation-based classification. Multimed. Tools Appl. 2020, 79, 20617–20638. [Google Scholar] [CrossRef]
- Rathgeb, C.; Dantcheva, A.; Busch, C. Impact and detection of facial beautification in face recognition: An overview. IEEE Access 2019, 7, 152667–152678. [Google Scholar] [CrossRef]
- Li, W.; Nie, W.; Su, Y. Human action recognition based on selected spatio-temporal features via bidirectional LSTM. IEEE Access 2018, 6, 44211–44220. [Google Scholar] [CrossRef]
- Zhang, C.L.; Liu, G.W.; Zhan, X.; Cai, H.; Liu, Z. Face detection algorithm based on new haar features and improved AdaBoost. J. Chang. Univ. Sci. Technol. (Nat. Sci. Ed.) 2020, 43, 89–93. [Google Scholar]
- Tan, G.X.; Sun, C.M.; Wang, J.H. Design of video vehicle detection system based on HOG features and SVM. J. Guangxi Univ. Sci. Technol. 2021, 32, 19–23, 30. [Google Scholar]
- Gu, W. Research on moving target detection algorithm based on LBP texture feature. Off. Informatiz. 2017, 22, 21–24. [Google Scholar]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the Dimensionality of Data with Neural Networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, J.; Liang, X.; Shen, S.; Xu, T.; Feng, J.; Yan, S. Scale-aware fast R-CNN for pedestrian detection. IEEE Trans. Multimed. 2017, 20, 985–996. [Google Scholar] [CrossRef] [Green Version]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Kong, T.; Yao, A.; Chen, Y.; Sun, F. Hypernet: Towards accurate region proposal generation and joint object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 845–853. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Chen, Y.; Han, C.; Wang, N.; Zhang, Z. Revisiting feature alignment for one-stage object detection. arXiv 2019, arXiv:1908.01570. [Google Scholar]
- Duan, K.; Bai, S.; Xie, L.; Qi, H.; Huang, Q.; Tian, Q. Centernet: Keypoint triplets for object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27–28 October 2019; pp. 6569–6578. [Google Scholar]
- Zhu, C.; He, Y.; Savvides, M. Feature selective anchor-free module for single-shot object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 840–849. [Google Scholar]
- Tian, Z.; Shen, C.; Chen, H.; He, T. Fcos: Fully convolutional one-stage object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27–28 October 2019; pp. 9627–9636. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Bodla, N.; Singh, B.; Chellappa, R.; Davis, L.S. Soft-NMS—Improving object detection with one line of code. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 5561–5569. [Google Scholar]
- Neubeck, A.; van Gool, L. Efficient non-maximum suppression. In Proceedings of the 18th International Conference on Pattern Recognition (ICPR’06), Hong Kong, China, 20–24 August 2006; Volume 3, pp. 850–855. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 8759–8768. [Google Scholar]
- Stewart, R.; Andriluka, M.; Ng, A.Y. End-to-end people detection in crowded scenes. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2325–2333. [Google Scholar]
- Peng, D.; Sun, Z.; Chen, Z.; Cai, Z.; Xie, L.; Jin, L. Detecting heads using feature refine net and cascaded multi-scale architecture. In Proceedings of the 2018 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 August 2018; pp. 2528–2533. [Google Scholar]
- Zheng, L.; Shen, L.; Tian, L.; Wang, S.; Wang, J.; Tian, Q. Scalable person re-identification: A benchmark. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1116–1124. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Zhang, J.; Chen, L.; Li, Z.; Wang, S.; Chen, Z. Pedestrian head detection algorithm based on clustering and Fast RCNN. J. Northwest Univ. 2020, 50, 971–978. [Google Scholar]
- Ayala, A.; Fernandes, B.; Cruz, F.; Macêdo, D.; Oliveira, A.L.; Zanchettin, C. KutralNet: A portable deep learning model for fire recognition. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | AP/% | Precision/% | Recall/% |
|---|---|---|---|
| Original YoloV4 | 88.52 | 91.15 | 86.93 |
| Soft YoloV4 | 90.54 | 91.94 | 85.55 |
| Methods | Brainwash (AP/%) | SCUT_HEAD (AP/%) |
|---|---|---|
| ReInspect | 78.10 | 77.50 |
| FRN_CMA | 88.10 | 86.30 |
| YoloV3 | 85.11 | 84.13 |
| CFR-PHD | 90.20 | 87.70 |
| Soft YoloV4 | 92.29 | 91.70 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Xia, S.; Cai, Y.; Yang, C.; Zeng, S. A Soft-YoloV4 for High-Performance Head Detection and Counting. Mathematics 2021, 9, 3096. https://doi.org/10.3390/math9233096
Zhang Z, Xia S, Cai Y, Yang C, Zeng S. A Soft-YoloV4 for High-Performance Head Detection and Counting. Mathematics. 2021; 9(23):3096. https://doi.org/10.3390/math9233096
Chicago/Turabian StyleZhang, Zhen, Shihao Xia, Yuxing Cai, Cuimei Yang, and Shaoning Zeng. 2021. "A Soft-YoloV4 for High-Performance Head Detection and Counting" Mathematics 9, no. 23: 3096. https://doi.org/10.3390/math9233096
APA StyleZhang, Z., Xia, S., Cai, Y., Yang, C., & Zeng, S. (2021). A Soft-YoloV4 for High-Performance Head Detection and Counting. Mathematics, 9(23), 3096. https://doi.org/10.3390/math9233096